電動四驅混合動力汽車工作模式分析及關鍵參數設計
2015-01-07 03:04:46王俊華伊海霞魏丹夏珩
汽車技術 2015年3期
王俊華 伊海霞 魏丹 夏珩
(廣汽集團汽車工程研究院)
電動四驅混合動力汽車工作模式分析及關鍵參數設計
王俊華 伊海霞 魏丹 夏珩
(廣汽集團汽車工程研究院)
對所研發的電動四驅混合動力汽車的幾種工作模式進行了分析,該車工作模式包括自動起停、制動能量回收、純電驅動、2WD驅動和4WD驅動以及換擋輔助等。在此基礎上,基于系統效率最優原則,介紹了混合動力系統關鍵控制參數的設計,并通過實車轉鼓試驗對工作模式和設計參數進行了驗證。
1 前言
目前,在研的混合動力系統有行星齒輪式和電動四驅式2種典型的結構形式[1],如日本豐田公司推出的“Prius”[2,3]、美國福特公司推出的“Escape”[4,5]及美國通用公司推出的“Allison”[6]均采用了基于行星齒輪機構的混合動力系統。但上述行星齒輪機構的混合動力系統結構復雜,研發和制造成本高,且上述公司均申請了專利對其技術方案進行保護。因此,我國需要研究開發具有自主知識產權的混合動力系統方案來規避國外專利,進而推動我國節能汽車技術和產業的發展。
電動四驅式混合動力系統結構易于實現,便于在傳統汽車的基礎上進行改造且控制簡單,已成為我國研發的熱點,如夏珩等[7]提出了一種可實現四驅功能的混合動力系統,闡述了基于系統效率最優理論的經濟性控制方法,但沒有論述車輛的工作模式,而工作模式的分析和定義是整車控制策略設計的基礎。為此,本文對電動四驅混合動力系統的工作模式進行了分析,在此基礎上對其關鍵控制參數進行了設計。
2 系統結構
圖1為所研發的電動四驅混合動力汽車系統結構,是在發動機前置前驅的傳統AMT車輛的基礎上,通過增加前電機和后電機以及儲能裝置構成電動四驅混合動力系統。前軸由發動機和前電機聯合提供動力,并通過AMT(含離合器)將動力輸出,經前軸差減分配給兩前輪。后軸由后電機提供動力,經后軸差減分配給兩后輪。前電機和后電機均為可逆電機,既可以工作在電動機模式為車輛提供驅動力,也可以工作在發電機模式產生電能。電池作為儲能裝置存儲電機產生的電能和向電機提供電能。
在停車掛空擋的工況(以下稱起停工況)下,該四驅混合動力汽車可以實現發動機自動起停功能;在驅動工況下,通過使能和禁用不同的動力源可實現2WD、純電和4WD等3種驅動形式;在滑行和制動工況下,可實現能量回收功能。
3 起停工況工作模式
此工作模式下,在車輛靜止、換擋手柄位于空擋位置時激活自動起停功能。若電池電量高于一定閾值,則發動機可自動停機,進入空擋停機模式,以改善燃油經濟性;若電池電量低于一定閾值,則發動機可自動起動,進入空擋怠速模式以補充電池電量。起停工況工作模式見表1。

表1 起停工況工作模式
3.1 空擋停機模式
空擋停機模式下的能量流如圖2所示,整車無能量流。
3.2 空擋怠速模式
空擋怠速模式下的能量流如圖3所示,能量流是從發動機到前電機的機械能,經前電機轉化為電能輸送給電池。
4 驅動工況工作模式
4.1 2WD驅動工作模式
2WD驅動是指AMT擋位接合、離合器接合、前軸使用發動機作為主要動力源進行驅動,此時后電機處于零扭矩狀態,即后軸不參與驅動,而前電機可處于零扭矩、發電或助力狀態。根據前電機的介入方式可實現2WD基本模式、2WD發電模式和2WD助力模式等3種驅動模式,如表2所列。

表2 2WD驅動工況工作模式
4.1.1 2WD基本模式
前電機處于零扭矩狀態時,車輛工作模式為2WD基本模式,此時能量流與傳統汽車類似,是從發動機傳遞到前軸的機械能,如圖4所示。
4.1.2 2WD發電模式
前電機處于發電狀態時,車輛工作模式為2WD發電模式。此時,發動機扭矩一部分通過AMT傳遞到前軸進行驅動,另一部分用于帶動前電機發電,產生的電能存儲電池中。圖5為2WD發動機模式能量流。由圖5可看出,發動機輸出的一部分機械能傳遞到前軸進行驅動,另一部分機械能傳遞到前電機,轉化為電能輸送給電池。
4.1.3 2WD助力模式
前電機處于助力狀態時,車輛工作模式為2WD助力模式。此時發動機扭矩和前電機扭矩耦合后通過AMT傳遞到前軸進行驅動,前電機消耗電池存儲的電能。圖6為2WD助力模式能量流。由圖6可看出,能量流一部分是從發動機傳遞到前軸的機械能,同時另一部分電能從電池輸送給前電機,轉化為機械能并傳遞到前軸進行驅動。
4.2 純電驅動工作模式
純電驅動是指僅使用后電機進行驅動,此時AMT處于空擋位置。根據發動機和前電機的狀態,又可進一步劃分為純電驅動模式和串聯驅動模式,如表3所列。

表3 純電驅動工作模式
4.2.1 純電驅動模式
在純電驅動模式下,前軸動力系統不提供動力并與前軸車輪分離。后電機從電池獲取電能,并將電能轉化為機械能,通過后軸差減向后軸車輪提供驅動力。
圖7為純電驅動模式能量流。由圖7可看出,電池輸送電能給后電機,并轉化為機械能傳遞到后軸進行驅動。
4.2.2 串聯驅動模式
與純電驅動模式不同的是,在串聯驅動模式下,發動機起動并帶動前電機轉動進行發電,從而提供后電機驅動所需的電能,多余的電能被存儲在電池中。
圖8為串聯驅動模式的能量流。由圖8可看出,一部分機械能從發動機傳遞到前電機,轉化為電能輸送給電池;同時,一部分電能從電池輸送給后電機,轉化為機械能并傳遞到后軸進行驅動。
4.3 4WD驅動工作模式
4WD驅動是指AMT結合離合器和擋位,前軸使用發動機作為主要動力源在前軸進行驅動,同時后軸使用后電機作為唯一動力源進行驅動。根據前電機的介入方式可實現4WD基本工作模式、4WD發電工作模式、4WD助力工作模式等,如表4所列。

表4 4WD驅動工作模式
4.3.1 4WD基本模式
前電機處于零扭矩狀態時,車輛工作模式為4WD基本模式,如圖9所示。由圖9可看出,一部分能量流是從發動機傳遞到前軸的機械能;另一部分能量流是由電池輸送給后電機的電能,轉化為機械能并傳遞到后軸進行驅動。
4.3.2 4WD發電模式
前電機處于發電狀態時,車輛工作模式為4WD發電模式。此時,發動機扭矩一部分通過AMT傳遞到前軸進行驅動,另一部分用于帶動前電機發電,產生的電能一部分輸送給后電機進行驅動,另一部分存儲在電池中。圖10為4WD發電模式能量流。由圖10可看出,能量流分為三部分,一部分是從發動機傳遞到前軸的機械能;一部分機械能從發動機傳遞到前電機,轉化為電能輸送給電池;另一部分電能從電池輸送給后電機,轉化為機械能并傳遞到后軸進行驅動。
4.3.3 4WD助力模式
前電機處于助力狀態時,車輛工作模式為4WD助力模式。此時發動機扭矩和前電機扭矩耦合后通過AMT傳遞到前軸進行驅動,前電機消耗電池存儲的電能。圖11為4WD助力工作模式能量流。由圖11可看出,能量流分為三部分,一部分是從發動機傳遞到前軸的機械能;一部分電能從電池輸送給前電機,轉化為機械能并傳遞到前軸進行驅動;另一部分電能從電池輸送給后電機,轉化為機械能并傳遞到后軸進行驅動。
5 制動工況工作模式
當駕駛員松開加速踏板,車輛進行滑行或制動時,車輛進入制動能量回收工作模式。根據車輛當時所處的驅動形式(2WD驅動、純電驅動或4WD驅動),車輛分別進入2WD制動能量回收工作模式、純電制動能量回收工作模式和4WD制動能量回收工作模式,如表5所列。
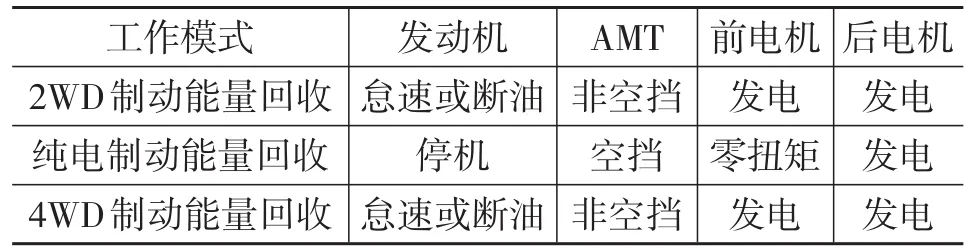
表5 制動工況工作模式
5.1 2WD制動能量回收模式
在2WD制動能量回收工作模式下,AMT結合離合器和擋位,發動機進入反拖狀態提供一定的摩擦阻力。同時,前電機也發出隨制動踏板深度增加的負扭矩,吸收一部分車輛動能實現能量回收功能。圖12為2WD能量回收模式能量流。由圖12可看出,一部分能量流是從前軸到前電機的機械能,另一部分能量流是從前電機到電池的電能。
5.2 純電制動能量回收模式
在純電制動能量回收工作模式下,AMT處于空擋,即前軸發動機與前電機不驅動車輪。后電機發出隨制動踏板深度增加的負扭矩,吸收一部分車輛動能實現能量回收功能。圖13為4WD助力工作模式能量流。由圖13可看出,能量流是從后軸到后電機的機械能,經后電機轉化為電能輸送給電池。
5.3 4WD制動能量回收模式
在4WD制動能量回收工作模式下,AMT結合離合器和擋位,發動機進入反拖狀態提供一定的摩擦阻力。同時,前電機和后電機也發出隨制動踏板深度增加的負扭矩,吸收一部分車輛動能實現能量回收功能。圖14為4WD能量回收模式能量流。由圖14可看出,能量流一部分是從前軸到前電機的機械能,經前電機轉化為電能輸送給電池;另一部分是從后軸到后電機的機械能,經后電機轉化為電能輸送給電池。
6 關鍵控制參數設計
在明確整車工作模式的基礎上,開發電動四驅混合動力汽車的關鍵任務是確定控制參數,以使整車在滿足動力性的前提下具有較優的燃油經濟性和較低的排放性能。
6.1 系統效率最優原則
燃油經濟性關鍵控制參數設計的依據是系統效率最優原則[7]。系統效率定義為車輛當前的驅動功率與實現該驅動功率所需消耗的等效燃油功率之比。等效燃油功率由2部分組成,一部分是發動機消耗的燃油熱功率,另一部分是充入電池的電量或從電池放出的與電量等效的燃油熱功率。
系統效率為:
式中,Peng為發動機有效輸出功率;Pgen為前電機機械功率;Pmot為后電機機械功率;Pbat_chg為電池充電功率;Pbat_dhg為電池放電功率;beng(neng,Peng)為發動機燃油消耗率;λchg為充電等效油耗率;λdhg為放電等效油耗率;為變速器平均傳動效率;為前軸主減速器平均傳動效率;為后軸主減速器平均傳動效率;Hu為汽油熱值。
其中,電池的充電功率和放電功率可進一步由前電機和后電機的機械功率導出:
式中,ηgen為前電機的效率;ηmot為后電機的效率;為電池的平均充電效率;為電池的平均放電效率。
6.2 設計燃油經濟性的關鍵控制參數
決定整車性能的關鍵控制參數可分為兩類,一類參數影響工作模式的選擇,從而根據當前的運行狀態選擇最經濟的工作模式。如,從純電驅動到2WD驅動的轉換,需要設計最優的整車扭矩需求閾值以決策這一工作模式的轉換。另一類參數影響給定的工作模式下不同動力源之間的扭矩分配,從而在該工作模式下獲得最優的經濟性,如在2WD發電工作模式下,需要設計用于確定最優發電扭矩的參數以獲得最優的燃油經濟性。
6.2.1 工作模式選擇參數設計舉例
在車速較低、整車扭矩需求較小的情況下,通常采用純電驅動,這不僅可避免發動機在低效率區域工作,從而獲得更好的燃油經濟性,而且低速純電驅動還使整車具備電動爬行能力,同時改善起步平順性,避免頻繁換擋,從而改善駕駛舒適性。
在整車扭矩需求進一步提高或車速進一步提高時,根據系統效率的理論,純電驅動的系統效率低于2WD驅動或4WD驅動的系統效率,此時應進行2WD驅動或4WD驅動。
在給定的整車工作點(車速和整車扭矩需求)下,根據系統效率公式可分別計算出純電驅動的系統效率ηsys_ev、2WD驅動的系統效率ηsys_2wd和4WD驅動的系統效率ηsys_4wd,通過逐點比較三者的大小,選擇系統效率最高的驅動工作模式。如圖15所示,曲線1表示純電驅動和2WD驅動的分界線,曲線2表示2WD驅動和4WD驅動的分界線。在實際應用中,為保證工作模式平滑過渡,避免頻繁切換,對曲線1和曲線2作平滑處理。
確定曲線1和曲線2后,可進一步確定具體的工作模式。具體的工作模式選擇仍依據系統效率公式,此外還應考慮電量平衡的需要。
在純電驅動時,根據系統效率公式,純電驅動工作模式的系統效率高于串聯驅動工作模式,因而在電量充足的情況下,應優先選用純電驅動工作模式;在電量不足的情況下,采用串聯驅動工作模式以保證車輛低速性能的一致性。
在2WD驅動和4WD驅動時,根據電池電量和系統效率公式綜合判定采用基本工作模式、發電工作模式或助力工作模式。
6.2.2 特定工作模式參數設計舉例
在2WD驅動或4WD驅動且滿足整車扭矩需求的前提下,通過調整前、后電機的扭矩可調整發動機的工作點,從而獲得最優的系統效率。本文以2WD發電模式為例說明相關參數的設計。
在2WD發電模式下,其主要任務是根據當前的前軸工作點(前軸驅動扭矩需求,發動機轉速)找到合適的目標發電扭矩,這可以利用系統效率公式通過離線計算得到。
對于發動機工作平面的每一發動機轉速neng和前軸驅動扭矩τdrv執行以下步驟,找到最優系統效率ηsys_best。
a.令τeng=τdrv,計算發動機直接驅動的系統效率ηsys_engine(neng,τeng)作為基準,令ηsys_best=ηsys_engine。
b.根據所有滿足式(3)約束條件的發動機扭矩τeng和前電機扭矩τgen,計算系統效率ηsys_i。
式中,τeng_max為發動機最大扭矩;τeng_min為前電機最小扭矩;τgen_max為前電機最大扭矩。
c.對于得到的ηsys_i,逐個與ηsys_best比較,若ηsys_i>ηsys_best,則更新ηsys_best=ηsys_i。
d.最終得到的ηsys_best就是最優系統效率,相應的τeng是最優的發動機扭矩需求τeng_best,τgen即是最優的前電機扭矩需求τenggen_best。τgen<0表示前電機發電,τgen>0表示前電機助力,τgen=0表示前電機零扭矩,發動機單獨驅動。
以設定前軸工作點(1 600 r/min、60 N·m)為例,圖16給出了系統效率隨發動機工作點的變化情況。由圖16可看出,在此前軸工作點下,將發動機工作點配置在1 600 r/min、110 N·m時系統效率最高,此時前電機處于發電狀態,發電扭矩需求為-50 N·m。
6.2.3 主動安全系統對工作模式選擇的影響
出于行駛安全考慮,在選擇工作模式以及在實施制動能量回收時,應根據車輛主動安全系統控制的需要進行干預,其優先級高于上述對經濟性或動力性策略。這里所述的主動安全系統包括ABS、EBD、TCS、ESP等。如在濕滑路面上驅動時可能激活TCS,當TCS激活時將通過降低發動機扭矩并對制動系統施加短暫的制動力以實現驅動防滑功能。為確保TCS正常工作,應當優先選用2WD基本工作模式。
7 實際運行效果
為驗證電動四驅混合動力汽車的工作模式定義及工作模式轉換的有效性,進行了NEDC工況的轉鼓試驗,圖17為試驗示意。
圖18為NEDC工況轉鼓試驗的實車運行效果。根據瞬時工況不同,車輛在各工作模式之間自動轉換。由圖18可看出,在整個NEDC循環中,發動機工作點平穩,且位于或接近經濟區,電池電量基本維持平衡。與同平臺傳統車的試驗結果對比可知,所開發的混合動力汽車百公里油耗減少25%以上,進一步驗證了工作模式定義及工作模式轉換控制參數設計的可行性。
8 結束語
對所研發的電動四驅混合動力汽車的工作模式進行分析可知,所設計的電動四驅混合動力系統工作模式豐富,可實現包括發動機工作點調節、中低速電動行駛、再生制動、自動起停等混合動力技術,此外,還可實現加速助力、換擋輔助等功能,使整車具有更好的駕駛舒適性。
通過舉例闡述了混合動力系統關鍵控制參數的設計,并通過實車轉鼓試驗對應用效果進行了驗證。試驗結果表明,所開發的混合動力系統可有效實現節能減排的目的。
1 Iqbal Husain.Electric and Hybrid Vehicles Design Funda?mentals.CRC PRESS,2003.
2 Prokhorov D.Toyota Prius HEV Neurocontrol//Neural Net?worksInternationalJointConference.Orlando,2007: 2129-2134.
3 Liu Jinmng,Peng Huei.Control Optimization for a Powersplit Hybrid Vehicle//American Control Conference,Minne?apolis,2006:14~16.
4 Miller J M.Hybrid Electric Vehicle Propulsion System Ar?chitectures of the e-CVT Type.IEEE Transactions on Pow?er Electronics,2006,21(3):756~767.
5 Syed F U,Kuang M L,Hao Ying.Active Damping Wheeltorque Control System to Reduce Driveline Oscillations in a Power-split Hybrid Electric Vehicle.IEEE Transactions on Vehicular Technology,2009,58(9):4769~4785.
6 Miller J M,McCleer P J,Everett M.Ultracapacitor PlusBattery Energy Storage System Sizing Methodology for HEV Power Split Electronic CVT's//Proceedings of the IEEE In?ternationalSymposium on IndustrialElectronics.Du?brounik,2005:317~324.
7 夏珩,等.電動四驅混合動力汽車的功率分配策略.機電工程技術,2012,41(7):124~128.
(責任編輯文 楫)
修改稿收到日期為2014年11月4日。
接近角、離去角與總質量統計關系如圖17所示。
4 質量參數特征
由于車輛使用類型各不相同,質量參數差異較大,可作為數據參考。
4.1 整備質量與總質量關系
整備質量與總質量統計關系如圖18所示。
4.2 載質量與總質量關系
載質量與總質量統計關系如圖19所示。
4.3 載質量利用系數與總質量關系
載質量利用系數計算公式如下:
載質量利用系數與總質量統計關系如圖20所示。由圖20可見,總質量16 t以下車型載質量利用系數隨質量增大呈發散狀,逐步增大;總質量16 t以上車型載質量利用系數隨質量增大有變小的趨勢;總質量12 t以上車型載質量利用系數基本都大于1。
5 結束語
本文采用的數據均為正在市場上銷售的載貨汽車參數,具有較強的針對性和實用性。通過對配置參數、尺寸參數、質量參數等3個方面進行統計分析,闡述了載貨汽車整車參數特征,從中總結出一些規律和趨勢,對于載貨汽車整車開發具有一定的參考價值。
參考文獻
1 工信部“車輛生產企業及產品”公告庫.
2 GB/T 3730.3-1992汽車和掛車的術語及其定義車輛尺寸.
3 GB 7258-2012機動車運行安全技術條件.
4 王望予.汽車設計.北京:機械工業出版社,2000.
5 GB 1589-2004道路車輛外輪廓尺寸、軸荷及質量限值.
6 余志生.汽車理論.北京:機械工業出版社,2006.
(責任編輯簾 青)
修改稿收到日期為2014年11月1日。
Analysis on Operating Modes of a 4WD HEV and Design of Key Parameters
Wang Junhua,Yi Haixia,Wei Dan,Xia Heng
(Guangzhou Automobile Group CO.,LTD Automotive engineering institute)
The operating modes of 4WD HEV developed by GAC Group,which include automatic stop/start, braking energy recuperation,electric-only drive,2WD,4WD and shift assist,are analyzed in the paper.On this basis, based on the optimal system efficiency principle,design of critical control parameters of the hybrid system is introduced, and operating modes and design parameters are verified with vehicle dynamometer test.
4WD HEV,Operating mode,Parameter design
電動四驅混合動力汽車 工作模式 參數設計
U469.7
A
1000-3703(2015)03-0056-07
猜你喜歡
甘肅教育(2020年14期)2020-09-11 07:57:42
奧秘(創新大賽)(2020年1期)2020-05-22 02:42:38
小學科學(學生版)(2019年10期)2019-11-16 08:55:02
民用飛機設計與研究(2019年2期)2019-08-05 01:33:40
小哥白尼(趣味科學)(2019年12期)2019-06-15 10:56:32
人大建設(2018年2期)2018-04-18 12:17:00
時代英語·高二(2015年1期)2015-03-16 00:08:11
汽車與新動力(2015年1期)2015-02-27 12:11:01
中國衛生(2014年11期)2014-11-12 13:11:32
汽車與新動力(2013年5期)2013-03-11 16:08:17
