數值海浪對潛射導彈出水姿態影響研究
2015-01-06 06:28:56潘爽姚奕肖鋒
新型工業化 2015年3期
關鍵詞:模型
潘爽,姚奕,肖鋒
(海軍潛艇學院,山東 青島 266042)
數值海浪對潛射導彈出水姿態影響研究
潘爽,姚奕,肖鋒
(海軍潛艇學院,山東 青島 266042)
根據潛射戰術導彈水下垂直運動的過程及特點,建立了導彈在水中及出水階段的運動數學模型、推力矢量控制模型,分析了導彈水中和出水運動過程中5級海浪對導彈運動姿態的影響。通過仿真計算,得出了潛艇垂直發射戰術導彈后,5級海況下導彈水中受控運動和無控運動時出水姿態的變化情況,為研究潛射導彈水中彈道提供了參考。
海浪;潛射戰術導彈;運動姿態;影響
0 引言
潛射戰術導彈通常有水下垂直冷發射、水下垂直熱發射、運載器水平發射三種發射方式。本文主要討論水下垂直熱發射方式,研究導彈發射出筒后,在水中助推器點火,依靠推力矢量控制出水的運動過程。
當導彈出筒后,在水中向上作受控運動,在短時間內先后穿越海水介質和海空界面,期間受到海浪等海洋環境因素的影響,經歷了變速、俯仰、偏航、滾轉等復雜運動。這些過程決定了導彈的水中運動具有復雜的位移和速度變化[1]。海浪對潛射導彈水中和出水段運動的影響是全過程,全方位的。研究其對導彈運動的影響,對于準確分析導彈水中運動姿態的變化,正確計算水中彈道具有重要的意義。
由于導彈本身的特殊性,造價昂貴,通過大量實彈試驗的手段研究水下發射環境對導彈運動姿態的影響是不現實的,這就凸顯了數值仿真分析與建模的重要性。FLUENT軟件以其強大的流體力學計算能力,使得導彈運動以及水下環境的建模和仿真成為可能。
本文基于二階Stokes波理論,結合FLUENT中用戶自定義函數,采用流體體積法(VOF),建立了數值波浪模型,并通過動網格技術,建立了綜合仿真系統,實現了波浪及導彈運動的耦合計算,建立了推力矢量控制模型,給出算例,比較導彈受控和無控狀態下導彈出水姿態,驗證推力矢量控制模型的有效性。
1 導彈水中及出水運動數學模型
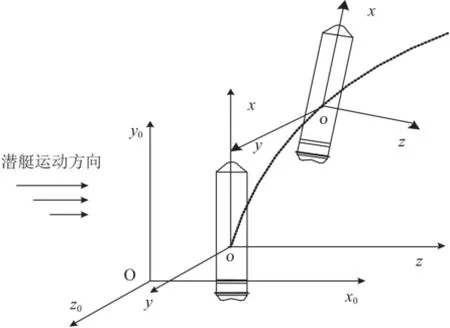
圖1 坐標系示意圖
1.1 建立坐標系
如圖1所示,為了分析導彈水中運動情況,建立發射和彈體速度兩個坐標系。
1.1.1 發射坐標系Ox0y0z0
發射坐標系的原點O位于發射點;Ox0z0平面與水平面平行,為發射橫向平面;Oy0軸垂直向上,沿發射點的鉛垂線向上;Ox0y0為發射鉛垂面。發射坐標系作為慣性參考坐標系,主要用來描述導彈質心在空間的坐標位置和姿態。
1.1.2 彈體坐標系oxyz
以導彈質心為坐標原點,ox軸沿導彈縱軸指向頭部;oy軸在導彈的縱對稱面內與ox軸垂直,指向彈體表面;oz軸與ox軸、oy軸構成右手直角坐標系。彈體坐標系主要用來描述導彈繞質心的旋轉運動,方便描述導彈受到的力和力矩。
1.2 相關姿態角定義[2]
俯仰角θ:指彈體縱軸ox在發射坐標系xoy平面投影與ox的夾角,導彈抬頭為正。偏航角ψ:指彈體縱軸ox與發射坐標系xoy平面的夾角,從彈尾看導彈左偏為正。滾動角γ:指彈體坐標系的oy與通過ox軸的鉛垂面之間的夾角,從彈尾順著導彈縱軸看,導彈右滾為正。
1.3 導彈水中和出水段的水彈道方程
潛射導彈水彈道方程由動力學方程組和運動學方程組組成,其中動力學方程組根據動量和動量矩定理建立,如下式所示:
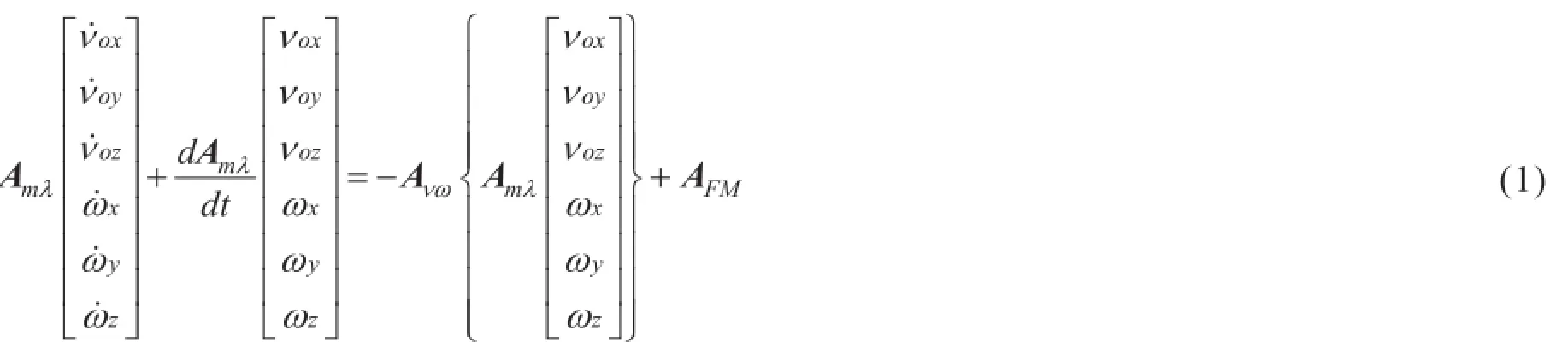
式中:Amλ為慣性矩陣;Avω為速度矩陣;AFM為力矩陣,參數參照[3]。運動學方程由導彈的質心運動和旋轉運動方程組成。
設導彈的質心在發射坐標系的位置為x, y, z,速度分量分別為,導彈質心速度在彈體坐標系的三個軸上的分量為vx,vy,vz,由坐標變換關系可得由積分便可得到導彈質心的運動軌跡,即導彈彈道。變換矩陣Az1→z參照文獻[3]。

由各姿態角的定義可以知道

由此得出了導彈的運動學方程。
2 數值波浪數學模型
本文采用二階Stokes波模擬海浪,我們稱為數值海浪。
數值波浪模型的建立包括造波及消波方式的選擇,對造波邊界的設置,VOF模型的應用以及計算步長的設置等諸多問題。目前造波方法主要有以下5種[4]:空間周期波,模擬造波機造波法,入射速度法造波,預先描述入射波法和引入離散奇點作為造波源造波的方法等。另外,通過對水波方程展開形式的不同,可以得出不同的波浪理論,如線性波理論,二階Stokes波理論,三階及三階以上Stokes波理論等。本文將通過入射速度法造波,模擬生成二階Stokes波,因為二階Stokes比線性波精度高,在誤差可接受范圍內又比三階Stokes波簡單。
二階Stokes波的波浪要素公式如下:
速度勢函數:

波速c:

波面高η:

水平速度u:

垂直速度w:

其中,H表示波高,L表示波長,d表示水深,α表示相位角[5]。
3 推力矢量控制算法
推力矢量控制系統,是通過改變導彈尾部火箭發動機尾噴流的方向,來實現對導彈飛行方向及運動姿態控制,本質上是推力方向的改變,產生相對彈體質心的推力力矩,從而使導彈的運動姿態發生改變,達到控制導彈彈道的目的。本文考慮導彈垂直出筒后,助推級發動機工作,導彈在推力矢量控制系統作用下調整運動姿態,并以預定姿態角出水。
對姿態角的控制方法采用經典的PID控制算法實現,控制規律如下
δe= k1(θg?θ)+k2ω (9)
θ表示導彈的俯仰角和偏航角,θg為導彈的控制姿態角,δe導彈控制舵角,k1、k2為控制參數,ω為角速度。
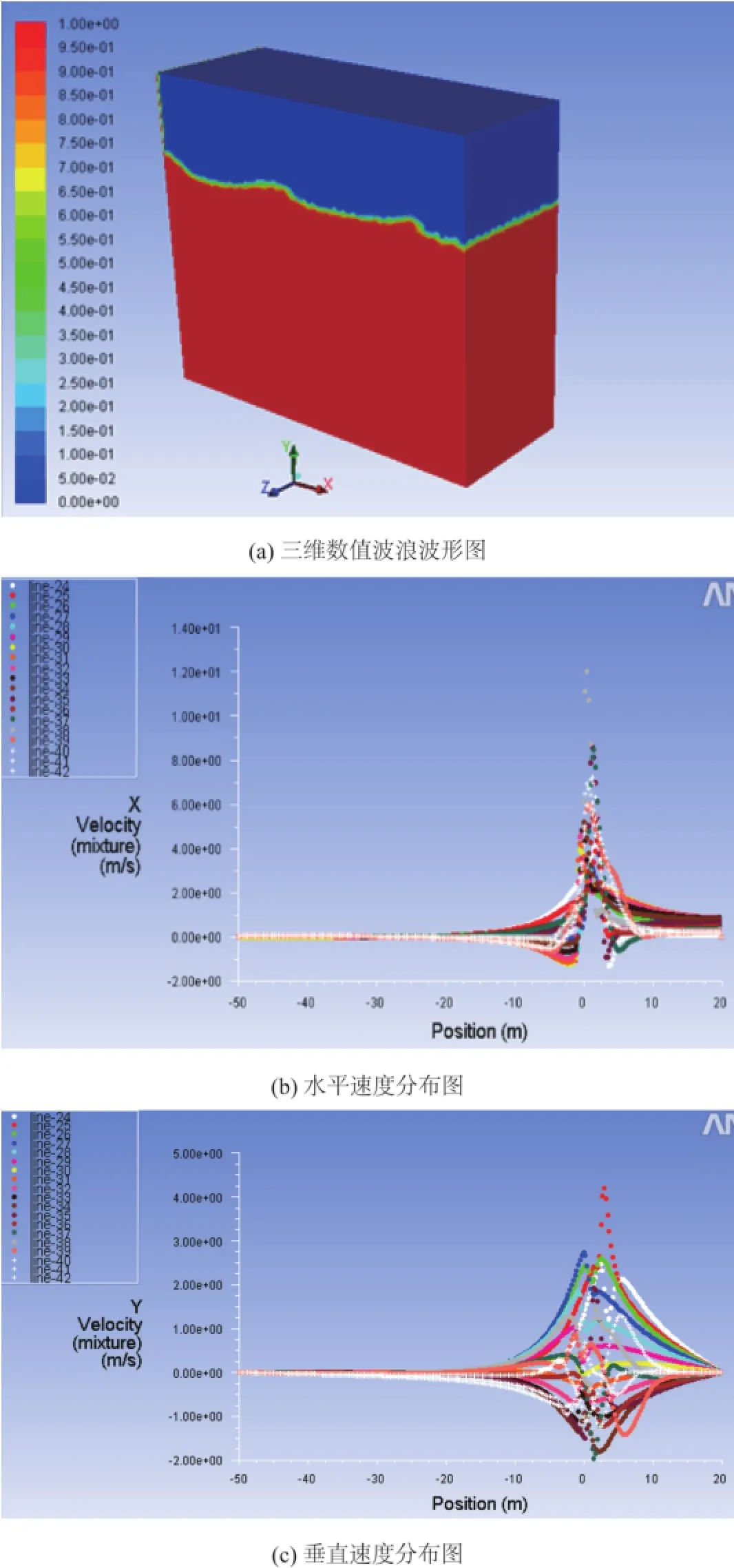
圖2
4 仿真分析
根據以上分析,在FLUENT環境下建立二階STOKES波數值海浪模型、導彈水中和出水段運動仿真模型,采用某導彈模型參數進行仿真,分析在5級海況下導彈運動姿態在受控(PID控制)和無控情況下的變化情況。
4.1 初始條件設定
本文以某導彈模型參數為基礎進行彈道仿真計算。發射深度設定為水下30米,艇速為2節。二階Stokes波采用設置速度入口的方式進行造波,將在水深為50米工況下對波長30米、波高4米、周期4秒,三維情況下計算域大小為80m×20m×70m。
4.2 三維數值波浪模擬
圖2為三維數值波浪波形圖及波浪速度分布圖。
在波形圖中,計算域邊界條件設置如下:左側為速度入口,右側和上側為壓力出口邊界,下側為壁面條件,同時設定VOF模型為明渠流。計算域長度90m,如圖所示上半部分為氣相,下半部分為液相,水深50m,氣相與液相均為不可壓縮流體。
4.3 五級波浪下導彈出水運動模擬
在FLUENT軟件中,通過編寫用戶自定義函數(UDF),利用動網格技術實現了導彈的三維六自由度受控運動和無控運動。
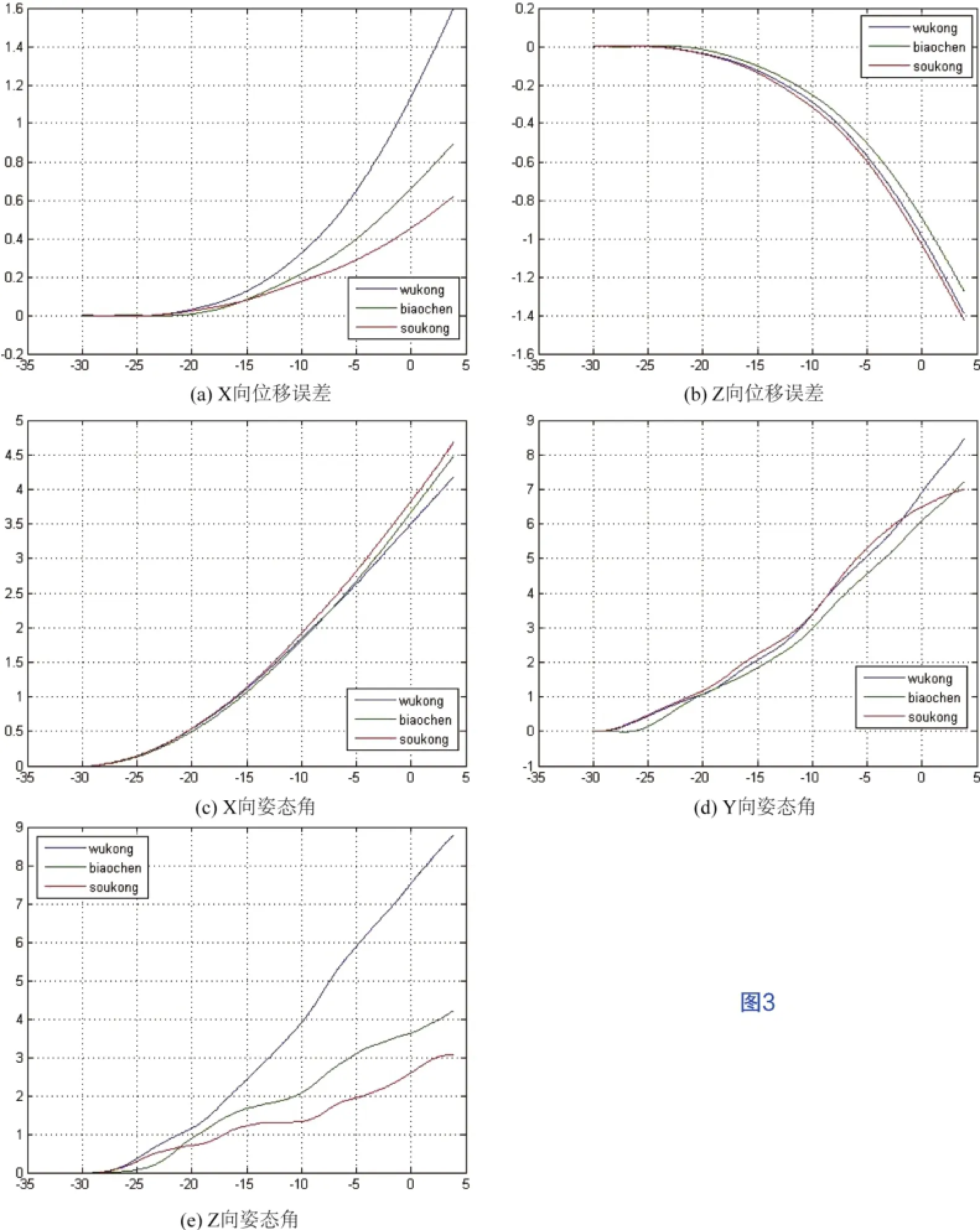
如圖3所示,橫軸為縱向位移,縱軸(a)~(e)分別為X、Z向位移誤差,X、 Y、Z向姿態角。在導彈出水過程中,相應位移與標稱彈道相減得位移誤差,不加推力矢量控制的X向彈道位移誤差為0.9m、Z向為0.14m,推力矢量控制時的X向彈道位移誤差為0.28m、Z向為0.13m。實驗數據說明,位移誤差很小,對彈道影響不大。同理,得到不受控彈道姿態誤差X向為0.3°、Y向1.3°、Z向為4.6°,受控彈道姿態誤差X向為0.05°、Y向0.2°、Z向為1.1°。實驗數據表明,導彈在受控情況下導彈姿態誤差明顯小于無控彈道。說明算法有效。
5 結論
對潛射戰術導彈在FLUENT環境下建立5級海浪模型,并利用動網格技術實現導彈垂直運動,與水下發射環境(5級海浪模型)相耦合,計算在5級海況下導彈水中及出水運動過程的位置和姿態誤差。仿真分析表明:在5級海浪的條件下,推力矢量控制彈道姿態角明顯優于無控彈道,驗證控制算法有效性。本文的仿真結果可為研究潛射戰術導彈水中彈道提供參考。
[1] 黃壽康等. 流體動力·彈道·載荷·環境[M]. 宇航出版社, 1991. 9: 160-163.
[2] 崔乃剛, 曹春泉, 韋常柱. 潛射導彈水下運動過程仿真分析. 彈道學報[J]. 2009, 21(2): 95-99.
[3] 黃壽康. 流體動力·彈道·載荷·環境[M]. 宇航出版社, 1991. 9.
[4] 張少康等. 導彈水下發射環境及出水彈道仿真[J]. 軟件, 2014, 30(5): 149-152.
[5] 竺艷蓉. 海洋工程波浪力學[M]. 天津大學出版社, 1991. 1.
The Research on the Influence to the Exceeding Water Gesture of the SLTM by Sea Wave
PAN Shuang, YAO Yi, XIAO Feng
(Navy Submarine Academy, Qingdao 266042, China)
The missile motion mathematical model and the thrust vector control model during the underwater state, which are established on the process of the SLTM vertical underwater movement, can be used to analysis the influence on the moving posture by the 5-class sea waves. According to the simulation calculation, the research can be beneficial to the study on SLTM underwater trajectory, respectively shows the variation of the missile exceeding water gesture on the controlled and uncontrolled conditions when the missile is launched by the submarine under the 5-class sea state.
sea wave; SLTM; motion attitude; effect
10.3969/j.issn.2095-6649.2015.03.06
: PAN Shuang, YAO Yi, XIAO Feng. The Research on the Influence to the Exceeding Water Gesture of the SLTM by Sea Wave [J]. The Journal of New Industrialization, 2015, 5(3): 42?46.
本論文受國家自然基金項目(基金號:61473306)資助。
潘爽(1981-), 女, 博士生, 研究方向: 導航系統初始對準、魯棒濾波理論的研究; 姚奕(1963-), 男, 碩士, 教授, 研究方向: 戰術導彈及使用。
潘爽,姚奕,肖鋒.數值海浪對潛射導彈出水姿態影響研究[J].新型工業化,2015,5(3):42-46
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19
