多普勒天氣雷達高速數據采集系統的設計
2015-01-05 05:54:24姚振東
成都信息工程大學學報 2015年2期
關鍵詞:系統
宗 安,姚振東,佘 勇,李 建
(成都信息工程學院電子工程學院中國氣象局大氣探測重點開放實驗室,四川成都610225)
0 引言
X波段磁控管接收相參多普勒天氣雷達是一種較短波長的雷達,具有高性能價格比的特點,在中小尺度天氣探測方面,仍然具有優勢[1]。在中國,這種雷達主要應用于地市級與縣級的人工影響天氣作業指揮和氣象災害應急服務,也可提供專業氣象服務的實時天氣資料,并在支線航站(機場)的氣象保障方面肩負重要作用。過去,這種雷達在較低距離分辨力(約0.5~1 km)的情況下使用,數據率相對較低,使用總線插卡式采集接口,甚至USB接口就能實現實時的雷達數據采集和對雷達的命令交互,不需要專門的高速數據采集系統。在更高的距離分辨力(不大于150 m)條件下,傳遞反射率因子、平均速度和速度譜寬(ZVW)3個基數據的同時,為了日后的數據分析和更好地完善處理算法,需保存字長增加的大動態范圍原始復基帶(I/Q)數據,總數據率超過原來的10倍,需要高速數據采集系統才能勝任。
為此,專門設計一個基于千兆以太網的多普勒天氣雷達高速數據采集系統,實現較大數據率的雷達原始復基帶數據和基數據的實時采集,以及雷達控制命令和狀態數據(伺服控制系統、發射機系統)的交互。
考慮到Xilinx公司的FPGA器件zynq-7000具有很好的結構和資源,以及可以使用的IP Core和便于開發的優點[2-3],充分利用其片上系統(SOC)的結構特點以及可實現軟件系統運行完成初始化配置和簡單運算的靈活性,極大地簡化系統的外部硬件構件和提高了內部硬件資源的利用率。
1 硬件系統的構建
Zynq-7000系列的型號XC7Z020器件,集成了兩個雙核Cortex-A9處理器內核,以及Artix-7系列的現場可編程門陣列(FPGA);并配置豐富的片內外設資源,如DDR控制器、USB控制器、SPI flash控制器、SD/SDIO外設控制器和千兆網以太網控制器等[3]。以XC7Z020為數據采集處理系統的核心器件,配置必要的外圍接口和驅動硬件,形成高速數據采集系統如圖1所示。
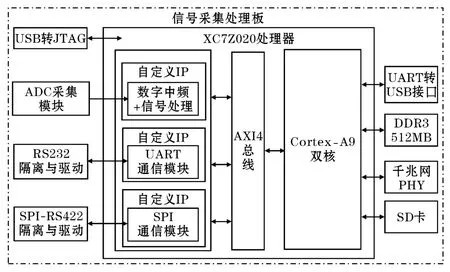
圖1 數據采集處理系統硬件方塊圖
Cortex-A9雙處理器內核有很強的處理能力,最高工作主頻可達400 MHz,是處理系統(Processing System,PS)的核心;片上存儲器、外部存儲接口和IO外設為其優質資源。系統用到可由PS支配的千兆以太網、DDR3、SD卡以及串口終端等外部設備。其中,千兆網控制器實現一個10/100/1000Mbps的以太網MAC、兼容IEEE802.2-2008標準、工作在全雙工或者半雙工的模式下,實現MAC控制發送接收、地址過濾、同步邏輯和DMA控制等操作[4-5]。與控制器相連接的物理以太網芯片接口(PHY)使用88E1518,該器件在噪聲環境下能以很低的功耗以每秒千兆的數據速率實現穩定傳輸性能[6]。異步串行接口UART使用USB轉UART芯片CY7C64225,在計算機中安裝驅動后就可以通過USB接口對其進行異步串行數據交互。SD卡和DDR3分別用于存儲程序和數據。
配置的ADC采集模塊用于輸入雷達中頻信號;RS232隔離與驅動模塊用于和雷達狀態控制單元通信,讀取雷達收發機與電源等工作狀態并控制雷達運行,同時實現內外電路的隔離;SPI-RS422隔離與驅動模塊用于和雷達伺服系統通信,讀取雷達天線(座)方位俯仰與狀態信息并控制天線運動,同時實現內外電路的隔離。
FPGA中包含資源豐富的可編程邏輯PL(Programmable Logic),包括可配置邏輯塊、乘法器、時鐘管理單元、48位的累加器和預加器、大量的隨機存儲器(RAM)等,為數字中頻接收機和天氣雷達數字信號處理以及相應接口提供足夠的硬件資源。
2 雷達數據采集
雷達的工作是邊掃描、邊采集、邊處理和邊傳輸的連續不間斷過程,在雷達角度和距離分辨力的前提下,數據量極大,這就要求采集系統必須具備穩定可靠的高速傳輸性能。
2.1 高速通帶采樣
ADC采集模塊采用16位250MSPS采樣率的中頻(IF)采樣模數轉換器AD9467,在最高中頻170 MHz、全量程范圍2.5 Vp-p時,具有75.5 dBFS的信噪比,適合天氣雷達高動態范圍需要,輸出兼容LVDS電平,性價比高。
對于1 uS發射脈沖,30 MHz雷達中頻信號的帶寬為1 MHz,屬于窄帶信號。根據仙農通帶采樣定理,可使用欠采樣技術以降低采樣頻率。但是,考慮到過采樣及抽取增益的優勢,采用100 MSPS的過采樣率進行通帶采樣,處理后的采樣率為1 MSPS,獲得20 dB的處理增益,信噪比相應提高20 dB,不考慮其他處理,系統實際動態范圍將超過95 dB。采樣后,獲得100 MSPS的數字中頻信號。
2.2 數字下變頻
由100 MSPS相同頻率的數控振蕩器(Numerically Controlled Oscillator,NCO)產生復中頻本振信號(正余弦各24位),與輸入的數字中頻信號混頻(相乘),完成數字下變頻(Digital Down-Conversion,DDC)功能。
由基于積分級聯梳狀濾波器(Cascade Integrator Comb filter,CIC)的多次抽取電路完成對下變頻后的復基帶信號的濾波和降采樣率抽取,輸出各20位的復基帶I/Q信號,如圖2所示。此過程完成后需要進行磁控管發射微波信號的隨機初相校正。
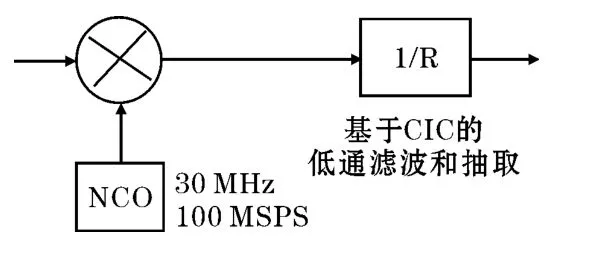
圖2 數字下變頻示意圖
2.3 信號處理與信息提取
信號處理主要實現地物和超折射雜波的抑制,以及ZVW參數的估計等,其他任務留給雷達系統的主控計算機完成。
由于地物和超折射雜波的低頻特性,可采用高通濾波器進行抑制。但是,如果這樣做,會導致天氣回波低頻成分損失。目前普遍推崇頻域高斯模型自適應處理(GMAP)具有原理上的優越性,能最大限度地補償天氣回波信號損失。然而,由于采樣時間不足,從時域到頻域的變換將產生失真,且頻率分辨力不夠,使其幾乎失去應用意義。基于時域高斯模型自適應處理(Gaussian Model Adaptive Processing in Time Domain,GMAP-TD)的方法才可兼顧雜波抑制的性能并保證天氣回波信號質量[7]。通過FPGA的PL實現這些可選方法。
ZVW參數估計可通過時域脈沖對處理(PPP)或頻域(FFT)算法實現。前者可實現通過參差重復頻率緩解速度模糊的工作模式;后者則需要改為雙(或多)批重復頻率緩解速度模糊的工作模式,而這種模式存在天線掃描目標變化問題,且時頻變換的原則性問題依然存在。因此,仍使用PPP主流算法。
等效反射率因子Z(dBZ)的計算見公式(1),Pr為雷達測量到的平均回波功率(dBm),R為回波距離(km);LA為路徑衰減(線性表示);C為雷達常數,通過公式(2)計算得到。


式(2)中,各變量及其量綱如下:雷達常數 C(mm6/m3),波長 λ(cm),發射脈沖功率 Pt(KW),發射脈寬τ(uS),饋線損耗LT、天線發射接收增益GT、GR(線性表示),方位俯仰波束寬度θ、φ(度)。
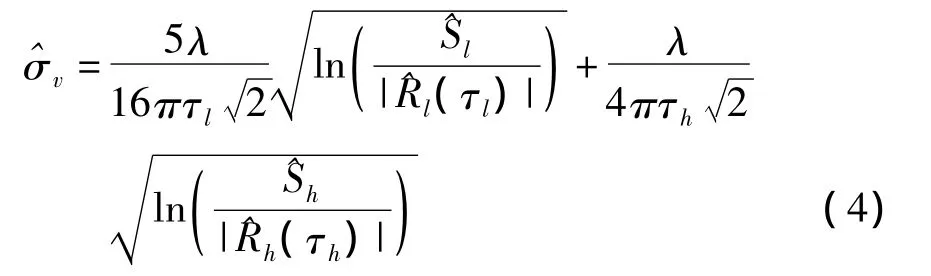
采用參差重復頻率緩解速度模糊的工作模式,其平均徑向速度V可由公式(3)計算[8]。

2個交替脈沖間隔τl和τh選擇5∶4比率,θτ為對應τl脈沖間隔的兩脈沖回波的1階相關 ^Rl(τl)的相角,θh則為對應于 τh的1階相關 ^Rh(τh)的相角。由此,根據相應的0階相關功率譜 ^Sl和^Sh,可以估算回波速度譜寬,如公式(4)。
通過處理器中的PL實現天氣雷達的ZVW參數的估計。
3 命令與狀態的交互
命令與狀態的交互主要通過2個串行接口完成,分別使用SPI同步串行協議和UART異步串行協議。
3.1 SPI通信的FPGA實現
SPI同步串行通信接口(RS422電平標準)用于和伺服控制系統通信,通過數據采集處理系統的中介,由千兆以太網至主控計算機完成天線的角碼、轉速、工作狀態等數據的傳送,并接收控制命令。
伺服控制系統通過天線座及其上安裝的旋轉變壓器獲取天線方位、俯仰角度的電信號,最后轉換成數字角碼的形式,完成軸角信息采集。由此方可實現天線的定位與掃描。
SPI工作于主從模式,時鐘4 MHz,字長16位,伺服控制系統為主機,數據采集處理系統為從機。SPI接收到的數據經由PS中的Cortex-A9周轉,以存儲緩沖方式匹配時鐘差異。SPI接口的接收模塊中,設有接收數據長度計數器,計數值鎖存于寄存器數組中;每次PS中的應用程序讀取完接收數據后,將接收寄存器數組及接收長度計數器清空。發送模塊中,設有發送始能信號和發送數據長度計數器時鐘信號;當發送始能高時,長度計數時鐘的上升沿將輸入的數據鎖存到寄存器中,發送數據長度計數器加1;當發送始能信號低時,開始發送數據。
3.2 UART通信的FPGA實現
UART異步串行通信接口(RS232電平標準)用于和收發系統通信,與SPI相似,完成收發機的工作參數/狀態、環境參數、開機及發射時間累積等數據傳送,以及接收計算機對雷達及收發機的控制命令。
UART由波特率發生器、接收和發送3個模塊構成。類似代碼較多,這里從略。
4 雷達數據傳輸
天氣雷達數據量大,要實時傳至主控計算機。千兆以太網能較好地滿足這種極高的傳輸速率要求。FPGA中以Cortex-A9作為控制器,設置、調度和使用物理以太網接口芯片88E1518,實現高速傳輸功能,完成雷達數據采集過程。
4.1 UDP通信協議及其socket類實現
TCP/IP網絡通信協議,具有兼容性強、易于實現,成本低的優點。該協議含鏈路層、網絡層、傳輸層和應用層共4層。鏈路層數據鏈路層是負責接收IP數據包并通過網絡發送,或者從網絡上接收物理幀,抽出IP數據包,交給IP層。網絡層對完成數據包分組以及協議實現;傳輸層用于格式化信息和數據的可靠傳輸,應用層完成特定功能的處理程序[9]。
傳輸層協議有2種:傳輸控制協議TCP和用戶數據報協議UDP。TCP協議是面向連接的可靠性數據傳輸協議,UDP通信協議是面向數據報傳輸層,設計中使用UDP協議傳輸,其數據報及封裝如圖3所示。一個UDP數據報由首部和數據2部分組成。首部由源端口(發送端端口號)、目的端口(接收端端口號)、長度(包括報頭和數據部分在內的總字節數)、校驗和4個域組成,每個域占2個字節。UDP數據報封裝之后,傳送至IP協議層;IP協議層將整個UDP數據報作為數據,添加IP頭后傳送至網絡層;網絡層添加幀頭和IP數據組合成一幀數據傳輸出去。
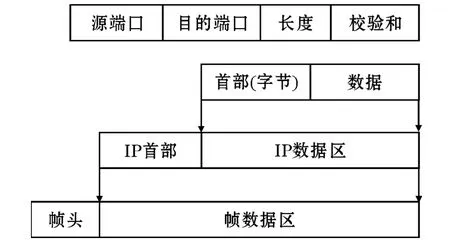
圖3 UDP數據報及封裝示意圖
套接字API是專門用于網絡通信的API函數,通過調用相關的函數就可以完成數據通信。套接字API中常用的系統函數有:套接字創建函數socket、連接函數connect、IP地址與端口綁定函數blind、發送數據函數 sendto、接收數據函數 recvfrom 等[10]。
UDP通信網絡在linux環境中設置的關鍵代碼如下:
查詢方式接收數據時存在一個致命弱點,即程序運行到socket網絡通信的接收函數時,若沒有接收到數據,程序將持續等待,直到有數據接收到為止。這將導致程序處于等待狀態而不能及時響應其他處理任務,出現“假死狀態”。
4.2 數據格式
數據采集板與計算機之間的通信使用十六進制、“標識碼+數據”的分類格式,通過判斷后形成相應的命令。計算機發送的命令分為3大類:數據采集類、伺服控制類和發射機系統控制類。
數據采集標識碼長度為6個字節:SCNdBz,主要向計算機傳回標識碼、伺服方位、俯仰角度、以及經過信號處理之后的回波數據總共1006*16 bit,共要傳送6組數據約96 kb。這些數據要在1 ms以內傳輸完畢,傳輸速度要大于96 Mbps。
數據采集命令分有、無雜波抑制,有、無噪聲剔除等。數據結果分等效反射率因子、平均速度及速度譜寬等。命令共有13種,常用4種。伺服控制標識符有24種,長度為4個字節,包括定位、自檢、RHI掃描、PPI掃描等操作。發射機控制標識符十幾種,長度也為4個字節,包括開發射機、開高壓、開燈絲、關燈絲、關高壓、發射機狀態信息等操作。
這些命令格式很相似,以數據采集命令“SCNdBz”為例作一表述,這里S代表采集回波,C代表有雜波;N代表有噪聲,dBz代表等效反射率因子,數據格式見表1。

表1 數據格式
4.3 啟動文件制作
數據采集處理系統有調試時的JTAG啟動和運行時的SD卡啟動2種方式。SD卡啟動的工作模式,開機時,由ARM完成對FPGA配置。SD卡啟動過程如下:
(1)上電后,燒寫在BootROM中的程序啟動,初始化芯片,讀 SD卡第一分區,尋找 Boot.bin文件,Boot.bin中須包含FSBL(First stage boot loader)程序。
(2)FSBL初始化采集板。如果提供了bitstream文件,初始化FPGA之后Boot.bin中第二塊代碼將在CPU中運行。
(3)SSBL接管CPU,做一些準備工作之后啟動Linux內核,內核將加載設備驅動,啟動文件系統等。
(4)內核啟動完畢后,用戶方可使用操作系統,如運行應用程序、修改文件等。
因此,要使高速采集系統正常工作就需要bitstream文件、FSBL程序、U-Boot、內核鏡像文件、文件系統等文件[11]。
4.3.1 FPGA的配置文件及啟動文件
高速數據采集后的信號處理、SPI通信和RS232串口通信都是在PL中實現,這些使用verilog語言實現的功能模塊要添加到包含PS和PL的嵌入式系統工程中,將PL中的處理模塊以用戶自定義IP核的模式加載在工程中,作為PS的外設,通過AXI4通信總線相連。工程創建過程如下:
(1)在Xilinx Platform Studio開發環境中創建一個Base System Builder工程,設計中使用官方提供的帶有千兆網口、HDMI等外設配置的工程,并將除了千兆網以外的其他外設全部刪除。
(2)在工程中添加用戶自定IP核:添加SPI核和RS232核時,在選擇文件類型時只選擇添加HDL文件即可,但添加信號處理模塊的IP核時,需要選擇添加網絡文件選項。本設計中的三個用戶自定義IP核均使用AXI-Lite總線的從模式,與PS交換數據使用寄存器方式,且最大寄存器個數為32個,每個寄存器的位寬32 bit。
(3)在工程界面中的IP Catalog對話框中的Project Local PCores下的User下將顯示所用用戶自定義IP核,雙擊每個自定義IP核名稱即可將IP核添加到工程,在選擇ARM處理器時選擇處理器0中。添加完用戶自定義的IP核之后,需要對各個IP核相關文件修改,主要有:修改MPD文件,添加端口;修改用戶邏輯的頂層文件,完成端口映射以及功能模塊的頂層例化;在工程中的port標簽下修改端口連接,將端口映射到PL部分的外部端口上;在Addresses標簽下可修改IP地址,系統使用系統分配的地址;最后修改ucf外部端口映射文件[10]。
(4)添加并修改自定義的IP核后,先編譯綜合生成PL的配置文件bitstream文件;其次點擊export design調用SDK軟件并自動加載生成的beatstream文件,創建ZYNQ FSBL工程,編譯生成FSBL啟動配置文件;最后將FPGA配置文件、FSBL啟動配置文件、設備文件u-boot.elf文件一起,使用創建ZYNQ啟動文件(Creat ZYNQ Boot Image)工具生成系統啟動文件Boot.bin。系統啟動的u-boot文件需要在linux環境中創建,詳見文獻[10]構建嵌入式Linux系統中的內容。
4.3.2 設備樹及內核鏡像文件
內核鏡像文件以及設備樹文件的生成需要在linux操作系統中完成。為方便起見,在Windows開發環境中安裝的VMware虛擬機系統中安裝Ubuntu 12.04版本的linux操作系統,并將官方網站下載的適用于Zedboard平臺的linux內核文件解壓后放入linux系統中的/home目錄下面[12]。
在linux內核文件中的scripts/dtc目錄下的digilent-zed.dts文件進行修改,修改后使用如下命令編譯:
./scripts/dtc/dtc-I dts-O dtb-o./devicetree.dtb arch/arm/boot/dts/digilent-zed.dts
此命令的輸入文件在arch/arm/boot/dts/digilentzed.dts,輸出文件devicetree.dtb存放于當前目錄下,運行完成之后產生設備樹文件。
內核鏡像文件的生成分配置和編譯兩步,可使用以下命令進行配置:
make ARCH=arm digilent-zed-defconfig
make ARCH=arm menuconfig
配置完成后,使用make命令編譯即可得到內核鏡像文件,至此啟動所需文件已齊備。
4.4 驅動及應用程序設計
驅動程序是操作系統中的應用程序和硬件設備數據交互的橋梁,分為字符型設備驅動、塊設備驅動和網絡設備驅動3大類。系統的外設驅動主要是網絡型設備驅動和字符型設備驅動,其中千兆網驅動程序已經集成于內核系統中,SPI、RS232串口和信號處理3個設備使用字符型設備驅動。應用程序是系統運行的靈魂,直接影響到數據傳輸系統的可靠性、穩健性。系統中,程序要實現千兆網UDP通信、異步串口通信和同步SPI通信,通信速度各不相同,串口通信速率為9600 bps,SPI通信速度為4 Mbps,信號處理之后的數據為96 kb。且要求1 ms內傳輸完畢,否則幀與幀之間存在數據覆蓋,因此傳輸的速度大于96 Mbps。這3種通信速度和數據量大小都不同,如果只用單線程的順序執行程序是無法實現系統的要求,要使用定時器、多線程等處理。
4.4.1 驅動程序設計
串口和SPI接收到的數據存儲在一定長度的寄存器中,每個數據都有幀頭,以防止數據混亂。每次讀取串口數據和SPI中的數據后,將緩存寄存器中的所有數據清空。信號處理后獲得視頻信號數據存儲在深度為1024、位寬為16 bit的雙端口ROM中。雙端口ROM讀寫使用不同的時鐘,解決讀寫速率不匹配的問題。
以信號處理模塊的驅動程序為例。信號處理后的數據存儲在雙端RAM中,同時設置一些控制端口。驅動中數據交換是通過總線模式進行,使用10個寄存器,其功能見表2。

表2 數據采集寄存器及功能表
字符型設備驅動程序包含設備加載、卸載以及文件操作函數。驅動程序加載時系統調用module-init宏實現模塊的初始化操作,在驅動中radar-processinit函數主要完成以下工作:
(1)內核注冊MISC型設備驅動;
(2)將信號處理模塊物理地址映射到虛擬地址;
調用module-exit宏實現信號處理模塊的驅動卸載,radar-process-exit函數完成模塊的清除工作,具體實現虛擬地址釋放和刪除設備文件[13]。
驅動程序中定義了對信號處理處理模塊的讀寫和打開、關閉等操作接口函數,文件操作結構為:
其中,radar-process-open 和 radar-process-release為打開和關閉操作封裝函數 在 radar-processopen中完成打開設備,radar-process-ioctl函數用于對雷達處理器的寫操作,通過內核函數copy-from-user實現。
radar-process-read函數實現雷達數據讀取并傳到應用層程序中,數據傳遞使用地址傳輸模式,而不是使用內核函數copy-to-user,具體實現代碼如下:
驅動程序中讀取數據通過buffer指針傳到應用程序。驅動設計完成后,在linux環境中編譯生成ko文件,并將其加載到內核中運行,才能在應用程序中讀寫硬件設備。驅動文件可使用insmod和rmsmod命令動態添加模塊加載,也可將驅動編譯到內核中,系統啟動時自動將驅動運行。動態添加驅動的方式比較靈活,易于調試[14]。
4.4.2 應用程序設計
在Linux系統中運行的應用程序要實現數據傳輸和命令交互的功能,包括UDP網絡通信、發射機系統控制及狀態讀取和伺服系統控制及角度、轉速等信息獲取。由于RS232異步串口通信速率較慢、狀態獲取不能影響其他功能的正常運行,UDP接收函數在沒接收到數據時一直等待而不做其他操作,這使單線程程序無法滿足設計的要求,因此使用多線程編程和定時器編程。應用程序設計使用一個主線程和兩個子線程,共三個線程,UDP接收程序占用一個線程,spi接收占用一個線程,主線程中完成服務器發送的命令的解析以及相關函數的調用,線程之間通信使用變量,定時器函數用于RS232串口通信的數據讀取。多線程的創建可使用 pthread-create函數[15]。
UDP網絡接收函數使用一個線程,此線程中除了接收計算機中傳輸的數據外,還要對接收到的命令進行檢測,除數據采集命令外,其他控制命令只執行一次,此線程的實現代碼如下:
定時器函數用于異步串口通信數據讀取,每隔一秒鐘調用串口讀取函數并將數據清空,更新全局變量數據,當接收到計算機應用程序的讀取發射機系統狀態命令時,無需等待即可將發射機的相關數據傳送至計算機。
主函數完成UDP網絡通信套接字創建及IP地址、通信端口綁定,定時器初始化,創建線程,打開SPI模塊、RS232模塊和信號處理設備,命令解析以及數據讀取傳送,具體流程如圖4所示。應用程序設計完成之后,在linux環境中使用交叉編譯工具生成的可執行文件才能在數據采集系統中運行。
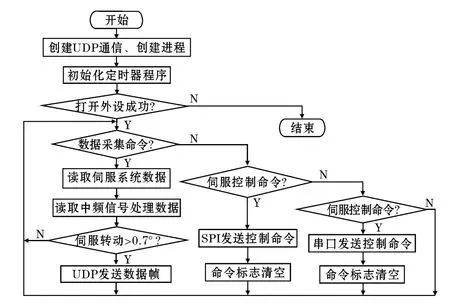
圖4 主線程流程圖
5 系統測試與結果
一個制作完成的高速數據采集系統如圖5所示。

圖5 高速數據采集系統
對高速數據采集系統的測試主要分為功能測試和穩定性測試。功能測試主要有通信速率測試、伺服系統控制、發射機系統控制、數據采集測試,穩定性測試限于條件,考慮采用正常采集數據時系統連續正常工作時間長度的方法考量。
功能測試時由計算機終端應用軟件發送控制命令,經信號采集板接收后傳送至相應的控制分系統。經測試,數據采集系統中的千兆網通信速率容易達到640 Mbps;能準確地控制伺服系統完成定位、自檢、RHI掃描、PPI掃描等控制;控制發射機系統完成開(關)高壓(端接假負載,未送到天線上發射)、開(關)燈絲等控制以及發射機當前工作狀態信息的回傳;用信號源潰入中頻信號,經采集系統的前端——中頻接收機和信號處理器后的反射率因子、平均徑向速度和速度譜寬等雷達基數據能實時無丟失地送到計算機中。
穩定性測試時使用計算機終端處理軟件正常的控制數據采集系統連續工作168小時,其間數據采集系統沒有出現數據丟失、命令不響應、系統重啟等故障問題。有限時間和次數的試驗,表明系統在多普勒天氣雷達數據采集傳輸中的適用性;在實際應用中,還需考驗其抗干擾能力等環境適應性以及長期穩定可靠工作等性能。
6 結論與展望
多普勒天氣雷達數據采集系統是以Xilinx公司的具有SOC結構的FPGA器件zynq7000芯片聯合千兆以太網物理芯片88E1518實現硬件結構,通過內嵌處理器和嵌入式系統,運行軟件配置和操作調度來完成大量的數據傳輸和命令及狀態交互的。通過FPGA邏輯資源和內嵌處理器的軟件運行,系統的功能可以進一步增加;由于軟硬件的“可編程”特性,系統也可用于其他需要高速數據采集功能的場合。
采集系統同時具有天氣雷達信號處理的功能。中國有望逐步吸收發達國家已經出現的雙波長、雙偏振、多普勒天氣雷達(Dual-Frequency Dual-Polarized Doppler Radar,D3R)先進探測技術,其處理的數據量和復雜程度將大為增加,“硬件處理-高速傳輸-計算機處理”的方式將經常性地被采用,基于千兆以太網的采集系統的結構將極為有用。而基于無線千兆以太網的構思,對雷達系統的連接簡化和維修維護將帶來更大的便利。
[1] David McLaughlin,David Pepyne,Brenda Philips,et al.Short-Wavelength Technology and the Potential For Distributed Networks of Small Radar Systems[J].Bull.Amer.Meteor.SoC.,2009,90:1797-1817.
[2] Xilinx.Inc.,A Generation Ahead for Smarter Systems:9 Reasons Why the Xilinx Zynq-7000 all Programmable Soc Platform is the Smartest Solution[BE/OL].http://www.xilinx.com/publications/prod-mktg/zynq-7000-generation-aheadbackgrounder.2014.
[3] Xilinx.Inc.,Zynq-7000 All Programmable SoC O-verview[BE/OL].http://www.xilinx.com/support/documentation/data-sheets/ds190-Zynq-7000-Overview.2014.
[4] Xilinx.Inc.,Zynq-7000 All Programmable SoC Technical Reference Manual[BE/OL].http://www.xilinx.com/support/documentation/userguides/ug585-Zynq-7000-TRM.2013.
[5] Xilinx.Inc.,7 Series FPGAs Memory Interface Solutions User Guide[BE/OL].http://www.xilinx.com/support/documentation/ip-documentation/ug586-7Series-MIS.pdf,2012.
[6] 朱晴,吳寧,顧薛平.基于FPGA的千兆網絡數據采集系統設計與實現[J].微型機與應用,2011,30(21):53-59.
[7] Cuong M,Nguyen,V Chandrasekar.Gaussian Model Adaptive Processing in Time Domain(GMAPTD)for Weather Radars[J].J.Atmos.Oceanic Technol.,2013,30:2571-2584.
[8] M Sachidananda,D S Zrnic.Clutter Filtering and Spectral Moment Estimation for Doppler Weather Radars Using Staggered Pulse Repetition Time(PRT)[J].J.Atmos.Oceanic Technol.,2000,17:323-331.
[9] 馬文星,一種考慮QoS的多媒體業務跨層設計[J].重慶理工大學學報(自然科學),2011,25(6).
[10] 王雷.TCP/IP網絡編程技術基礎[M].北京:清華大學出版社,2012.
[11] 陸佳華,江舟,馬岷.嵌入式系統軟硬件協同設計實戰指南[M].北京:機械工業出版社,2013.
[12] 陳可.虛擬機在計算機實踐中的應用研究[J].科協論壇,2007,(5):26-27.
[13] 陳濤,余學才,朱良銷,等.信號發生模塊的Linux驅動程序設計[J].化工自動化及儀表,2010(11):88-91.
[14] Digilent.Inc.,Getting Started With Embedded Linux-ZedBoard[EB/OL].http://www.digilentinc. com/Data/Products/EMBEDDEDLINUX/ZedBoard-GSwEL-Guide.2013.
[15] 陳向群,陳渝,譯.操作系統——精髓與設計原理(第七版)[M].北京:電子工業出版社,2012.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
