基于混沌神經(jīng)網(wǎng)絡(luò)的混合動(dòng)力汽車狀態(tài)切換協(xié)調(diào)控制策略研究*
2015-01-04 09:04:24張?jiān)屎铥惾A畢銘軒梁春輝
汽車技術(shù) 2015年10期
關(guān)鍵詞:控制策略發(fā)動(dòng)機(jī)
張?jiān)屎铥惾A畢銘軒梁春輝
(1.長(zhǎng)春工程學(xué)院;2.吉林大學(xué) 汽車仿真與控制國家重點(diǎn)實(shí)驗(yàn)室;3.吉林省地方水電局)
基于混沌神經(jīng)網(wǎng)絡(luò)的混合動(dòng)力汽車狀態(tài)切換協(xié)調(diào)控制策略研究*
張?jiān)?,2侯麗華1畢銘軒3梁春輝1
(1.長(zhǎng)春工程學(xué)院;2.吉林大學(xué) 汽車仿真與控制國家重點(diǎn)實(shí)驗(yàn)室;3.吉林省地方水電局)
針對(duì)并聯(lián)混合動(dòng)力汽車在發(fā)動(dòng)機(jī)和電動(dòng)機(jī)工作狀態(tài)切換過程中非線性動(dòng)力耦合系統(tǒng)工作狀態(tài)所具有的混沌特征,提出了基于混沌神經(jīng)網(wǎng)絡(luò)的混合動(dòng)力汽車狀態(tài)切換協(xié)調(diào)控制策略。建立了協(xié)調(diào)控制總體模型構(gòu)架,設(shè)計(jì)了混沌神經(jīng)網(wǎng)絡(luò)工作狀態(tài)識(shí)別器,并通過試驗(yàn)對(duì)該識(shí)別器的準(zhǔn)確性進(jìn)行了驗(yàn)證。在此基礎(chǔ)上搭建了協(xié)調(diào)控制系統(tǒng)整車控制模型,針對(duì)協(xié)調(diào)控制策略進(jìn)行了仿真試驗(yàn)。結(jié)果表明,采用該控制策略能夠有效提高整車動(dòng)力性、燃油經(jīng)濟(jì)性與SOC平衡性,實(shí)現(xiàn)了對(duì)狀態(tài)切換過程的協(xié)調(diào)控制。
1 前言
并聯(lián)混合動(dòng)力汽車在發(fā)動(dòng)機(jī)和電動(dòng)機(jī)工作過程中,需要根據(jù)路況進(jìn)行能量分配和工作狀態(tài)的切換[1]。在狀態(tài)切換過程中,由于并聯(lián)混合動(dòng)力汽車多動(dòng)力源之間存在復(fù)雜的耦合模式,且動(dòng)力耦合系統(tǒng)狀態(tài)具有混沌的特征,傳統(tǒng)的控制方法難以實(shí)現(xiàn)對(duì)此類具有高度復(fù)雜性、非線性的動(dòng)力耦合系統(tǒng)的控制。而基于混沌神經(jīng)網(wǎng)絡(luò)理論的優(yōu)化是一種新型的直接搜索優(yōu)化算法,它即繼承了人工神經(jīng)網(wǎng)絡(luò)學(xué)習(xí)、并行處理和聯(lián)想的特點(diǎn),又能夠直接采用混沌變量在允許空間進(jìn)行搜索,搜索過程按混沌運(yùn)動(dòng)自身規(guī)律進(jìn)行,更容易跳出局部最優(yōu)解,其不僅搜索效率高[2,3],且對(duì)于變量較多、約束復(fù)雜的優(yōu)化問題算法簡(jiǎn)單、實(shí)現(xiàn)方便,可以充分利用對(duì)問題的某些先驗(yàn)知識(shí),具有較強(qiáng)的適應(yīng)性。因而,本文將混沌神經(jīng)網(wǎng)絡(luò)理論應(yīng)用于混合動(dòng)力汽車的狀態(tài)切換協(xié)調(diào)控制中,以期在保證SOC值在規(guī)定范圍內(nèi)變化的同時(shí),有效地提高整車動(dòng)力性與經(jīng)濟(jì)性,從而實(shí)現(xiàn)對(duì)狀態(tài)切換過程的協(xié)調(diào)控制,達(dá)到節(jié)能、環(huán)保與安全的目的。
2 混合動(dòng)力汽車運(yùn)行狀態(tài)分析
混合動(dòng)力汽車的實(shí)際運(yùn)行工況主要包括起步、加速、減速、巡航、上坡、下坡、制動(dòng)、停車、倒車等[4]。與傳統(tǒng)內(nèi)燃機(jī)汽車不同,混合動(dòng)力汽車包括發(fā)動(dòng)機(jī)和電機(jī)兩套動(dòng)力源,且兩套動(dòng)力系統(tǒng)分別具有不同的高效工作區(qū)。為了充分發(fā)揮并聯(lián)式混合動(dòng)力汽車的優(yōu)勢(shì),其在不同的運(yùn)行工況下應(yīng)具有多種不同的工作狀態(tài),在此基礎(chǔ)上進(jìn)行轉(zhuǎn)矩的合理分配及車輛的協(xié)調(diào)控制,以充分提高車輛整體性能。根據(jù)不同的工況要求和能量分配方案,可將混合動(dòng)力汽車分為純電動(dòng)狀態(tài)(AB段)、純發(fā)動(dòng)機(jī)狀態(tài)(BC段)、混合驅(qū)動(dòng)狀態(tài)(DE段)、行車充電狀態(tài)(CD段)、再生制動(dòng)能量回饋狀態(tài)(EF段)和怠速/停車狀態(tài)(OA段)等6種基本工作狀態(tài)[5,6],如圖1所示。
3 混合動(dòng)力汽車協(xié)調(diào)控制策略總體模型構(gòu)架
如何根據(jù)工況變化實(shí)現(xiàn)運(yùn)行狀態(tài)的切換、保證電池SOC平衡性且同時(shí)提高整車動(dòng)力需求及降低燃油消耗是混合動(dòng)力汽車協(xié)調(diào)控制策略的控制目標(biāo)。圖2為混合動(dòng)力汽車協(xié)調(diào)控制策略總體構(gòu)架,主要包括控制信號(hào)輸入和輸出模塊、工作狀態(tài)判別模塊與混合動(dòng)力汽車協(xié)調(diào)控制模塊。
輸入模塊和輸出模塊為控制策略的輸入信號(hào)和輸出信號(hào)部分,在實(shí)車中輸入信號(hào)由傳感器或執(zhí)行部件通過CAN總線提供給整車控制器(HCU),輸出信號(hào)經(jīng)HCU中的控制策略計(jì)算得到,由CAN總線傳遞到各執(zhí)行部件控制器;工作狀態(tài)判別模塊主要根據(jù)駕駛員加速踏板開度、制動(dòng)踏板開度、擋位、車速等實(shí)時(shí)判斷車輛工作狀態(tài);協(xié)調(diào)控制模塊主要依據(jù)車輛工作狀態(tài)判別結(jié)果對(duì)混合動(dòng)力汽車進(jìn)行協(xié)調(diào)控制。
4 混沌神經(jīng)網(wǎng)絡(luò)工作狀態(tài)識(shí)別器
4.1 工作狀態(tài)識(shí)別原理
要對(duì)混合動(dòng)力汽車進(jìn)行協(xié)調(diào)控制,首先應(yīng)實(shí)時(shí)預(yù)測(cè)識(shí)別出車輛當(dāng)前的工作狀態(tài),在此基礎(chǔ)上,針對(duì)具體工作狀態(tài)調(diào)整控制參數(shù),進(jìn)而實(shí)現(xiàn)協(xié)調(diào)控制的功能。
本文將混沌優(yōu)化算法(Chaotic Optimization algo?rithm)同BP神經(jīng)網(wǎng)絡(luò)(Back Propagation Neural Network,BPNN)相結(jié)合,采用混沌優(yōu)化BP神經(jīng)網(wǎng)絡(luò)(COBPNN)建立工作狀態(tài)識(shí)別與預(yù)測(cè)模型,在采集的實(shí)測(cè)工作狀態(tài)數(shù)據(jù)基礎(chǔ)上,依據(jù)工況特征對(duì)各工作狀態(tài)進(jìn)行識(shí)別,并將識(shí)別出的工作狀態(tài)作為混沌神經(jīng)網(wǎng)絡(luò)的訓(xùn)練樣本對(duì)網(wǎng)絡(luò)進(jìn)行訓(xùn)練,構(gòu)建混沌神經(jīng)網(wǎng)絡(luò)工作狀態(tài)識(shí)別器,然后對(duì)未知的工作狀態(tài)進(jìn)行在線識(shí)別與預(yù)測(cè)。與傳統(tǒng)BPNN相比,該COBPNN充分利用混沌優(yōu)化算法優(yōu)化神經(jīng)網(wǎng)絡(luò)的權(quán)值和閾值,提高了網(wǎng)絡(luò)訓(xùn)練的速度和精度,進(jìn)而提高了模式識(shí)別結(jié)果的準(zhǔn)確性。圖3為工作狀態(tài)識(shí)別原理圖。
工作狀態(tài)識(shí)別步驟如下。
a.選擇工作狀態(tài)特征參數(shù)。由于反映工作狀態(tài)的特征參數(shù)很多,因而會(huì)使工作狀態(tài)的識(shí)別變得復(fù)雜。為此選取最大車速Vm、平均車速V、平均加速度Va、平均減速度Vd、最大需求功率Pm-req、平均功率P作為工作狀態(tài)識(shí)別的6個(gè)特征參數(shù)。
b.構(gòu)建工作狀態(tài)參數(shù)評(píng)分器。該評(píng)分器的功能是計(jì)算待識(shí)別工作狀態(tài)的歸屬分值,歸屬分值計(jì)算式為:
式中,qi為某工作狀態(tài)歸屬于第i種典型工作狀態(tài)的得分,i=1,2,…,6;ki為歸屬權(quán)重,用來調(diào)整不同特征參數(shù)對(duì)評(píng)分影響的比例;fi(·)為歸屬分值計(jì)算函數(shù)。
c.將待識(shí)別運(yùn)行工況依據(jù)時(shí)間順序進(jìn)行分段,分別計(jì)算各工作狀態(tài)的6個(gè)特征參數(shù),并帶入特征參數(shù)評(píng)分器,進(jìn)一步求得各工作狀態(tài)歸屬值,按照最大歸屬值原則最終確定該運(yùn)行工況屬于哪種典型工作狀態(tài),并對(duì)其進(jìn)行標(biāo)記。標(biāo)記值1對(duì)應(yīng)“怠速/停車狀態(tài)”,2對(duì)應(yīng)“純電動(dòng)狀態(tài)”,3對(duì)應(yīng)“純發(fā)動(dòng)機(jī)狀態(tài)”,4對(duì)應(yīng)“行車充電狀態(tài)”,5對(duì)應(yīng)“混合驅(qū)動(dòng)狀態(tài)”,6對(duì)應(yīng)“減速/制動(dòng)能量回饋狀態(tài)”。
d.選取50組實(shí)測(cè)工況,采用工作狀態(tài)識(shí)別器進(jìn)行識(shí)別,并將已識(shí)別工作狀態(tài)作為訓(xùn)練樣本,利用神經(jīng)網(wǎng)絡(luò)進(jìn)行訓(xùn)練,構(gòu)建出符合6種工作狀態(tài)的神經(jīng)網(wǎng)絡(luò)識(shí)別器,用于新工況下工作狀態(tài)的識(shí)別與預(yù)測(cè)。
4.2 識(shí)別器結(jié)構(gòu)
將6種工作狀態(tài)下的特征參數(shù)作為COBPNN預(yù)先指定工作狀態(tài)的訓(xùn)練樣本,給定初始權(quán)值與學(xué)習(xí)率,構(gòu)建COBPNN工作狀態(tài)識(shí)別器,對(duì)未知工作狀態(tài)進(jìn)行在線識(shí)別。該COBPNN與BP網(wǎng)絡(luò)同屬前向型網(wǎng)絡(luò),但訓(xùn)練算法與BP算法不同,它是以混沌優(yōu)化方法為網(wǎng)絡(luò)訓(xùn)練時(shí)的權(quán)值、閾值修改算法,而混沌優(yōu)化的自身遍歷特性有效避免了BP算法存在的初值敏感性、收斂速度慢及局部極小等問題[7,8]。COBPNN工作狀態(tài)識(shí)別器如圖4所示。
圖4中,網(wǎng)絡(luò)的第1層為輸入層,輸入向量X=[x1,x2,…,x6],輸入層的6個(gè)輸入節(jié)點(diǎn)分別對(duì)應(yīng)行駛工況的6個(gè)特征參數(shù)。第2層為隱含層,隱含層節(jié)點(diǎn)個(gè)數(shù)為l,其激活函數(shù)為sigmoid函數(shù),該層任一節(jié)點(diǎn)j輸出為:
式中,xp為輸入向量;νpj為輸入層與隱含層之間連接權(quán)值;θνj為隱含層閾值。
第3層為輸出層,輸出層有6個(gè)神經(jīng)元,分別對(duì)應(yīng)(0001,0010,0011,0100,0101,0110)6種工作狀態(tài),其第i個(gè)節(jié)點(diǎn)輸出為:
式中,wji為隱含層與輸出層之間連接權(quán)值;θwi為輸出層閾值。
4.3 選擇混沌變量尋優(yōu)
目前,混沌優(yōu)化搜索的主要手段是載波,采用適當(dāng)?shù)妮d波方式可使混沌變量充分遍歷以求得最優(yōu)解。本文先用混沌優(yōu)化算法對(duì)BP神經(jīng)網(wǎng)絡(luò)的初始權(quán)值進(jìn)行一次載波,再將載波后的權(quán)值帶入BP算法快速收斂到局部最優(yōu),然后再利用混沌優(yōu)化算法對(duì)局部最優(yōu)進(jìn)行二次載波,即對(duì)其進(jìn)行一次小擾動(dòng),從而跳出局部最優(yōu)解,最終收斂到全局最優(yōu)。這種方法既提高了尋找全局最優(yōu)的速度,也提高了算法的收斂精度,在很大程度上克服了BP算法的缺陷,實(shí)現(xiàn)了優(yōu)勢(shì)互補(bǔ)。
設(shè)網(wǎng)絡(luò)的權(quán)值與閾值矩陣分別為V、W、θν、θw,對(duì)應(yīng)的載波矩陣為RV、RW、Rθν、Rθw,下面將說明如何通過載波混沌矩陣xn得到網(wǎng)絡(luò)的權(quán)值和閾值的載波矩陣。
a.網(wǎng)絡(luò)初始化。在[0,1]區(qū)間取具有微小差異的隨機(jī)數(shù),并按公式得到一系列的混沌變量,形成初始混沌序列。其中,xn∈[0,1],n為迭代次數(shù),λ為控制參數(shù),初始混沌序列記為
b.給出訓(xùn)練樣本。提供學(xué)習(xí)樣本,分別給出訓(xùn)練樣本集每個(gè)模式對(duì)的輸入向量和希望輸出向量
c.粗搜索階段。用一次載波方程(4)將混沌變量映射到[-1,+1]區(qū)間上:
式中,α1∈[0,1]為絕對(duì)誤差調(diào)解指數(shù);α2∈[0,1]為相對(duì)誤差調(diào)解指數(shù),且
在訓(xùn)練初期主要通過絕對(duì)誤差調(diào)整權(quán)值,在訓(xùn)練后期主要通過相對(duì)誤差進(jìn)行權(quán)值的修正。
在粗搜索階段,為獲得良好的遍歷性,近而得到較滿意的解,需將設(shè)置的迭代次數(shù)M取為M≥200,同時(shí)設(shè)置計(jì)算精度ε,不斷地進(jìn)行優(yōu)化學(xué)習(xí),當(dāng)滿足學(xué)習(xí)代數(shù)n=M,或經(jīng)過若干次迭代搜索后計(jì)算精度E仍保持不變時(shí),轉(zhuǎn)至細(xì)搜索階段,否則繼續(xù)迭代搜索。
d.細(xì)搜索階段。當(dāng)經(jīng)過若干次迭代搜索E仍保持不變時(shí),需按式(6)進(jìn)行二次載波,生成新的權(quán)值、閾值向量。
式中,δ為可調(diào)節(jié)參數(shù);xnew*為當(dāng)前最優(yōu)解。
重新計(jì)算當(dāng)前E值,若E<E*,則更新最優(yōu)值,即
設(shè)置新的迭代次數(shù)N(N≥M),重復(fù)優(yōu)化學(xué)習(xí)過程,當(dāng)滿足學(xué)習(xí)代數(shù)n=N,或計(jì)算精度E<ε時(shí),輸出最終的最優(yōu)解,否則繼續(xù)迭代搜索。
COBPNN訓(xùn)練流程如圖5所示。
4.4 COBPNN工作狀態(tài)預(yù)測(cè)模型實(shí)時(shí)預(yù)測(cè)結(jié)果及分析
為驗(yàn)證COBPNN優(yōu)化模型的泛化能力與預(yù)測(cè)能力,首先選取50組標(biāo)準(zhǔn)工作狀態(tài)樣本進(jìn)行學(xué)習(xí),建立工作狀態(tài)識(shí)別器模型,再隨機(jī)選取另外50組樣本代入模型進(jìn)行測(cè)試。表1為部分學(xué)習(xí)樣本的輸入與期望輸出的工作狀態(tài)識(shí)別結(jié)果。表2為部分測(cè)試樣本的輸入與對(duì)應(yīng)的期望輸出、BPNN實(shí)際輸出和優(yōu)化后的COBPNN實(shí)際輸出的工作狀態(tài)識(shí)別結(jié)果。通過對(duì)測(cè)試樣本的實(shí)際輸出與期望輸出的比較可知,所建立的COBPNN工作狀態(tài)識(shí)別器模型的泛化和預(yù)測(cè)能力較強(qiáng),工作狀態(tài)識(shí)別效果較好。

表1 工作模式識(shí)別器部分學(xué)習(xí)樣本及期望輸出數(shù)據(jù)

表2 工作模式識(shí)別器部分檢測(cè)樣本及實(shí)際輸出與期望輸出數(shù)據(jù)
針對(duì)我國城市交通日益龐大的車流量及在上下班高峰時(shí)期交通特點(diǎn),選取對(duì)于城市循環(huán)工況具有一定代表性的美國城市循環(huán)工況(UDDS)作為測(cè)試工況,利用統(tǒng)計(jì)學(xué)原理對(duì)采集的工況數(shù)據(jù)進(jìn)行分析處理,獲得了連續(xù)兩次從加速到制動(dòng)循環(huán)測(cè)試工況下發(fā)動(dòng)機(jī)轉(zhuǎn)速、電動(dòng)機(jī)轉(zhuǎn)速和車速的實(shí)時(shí)變化軌跡,如圖6所示。
由圖6a可看出,在5~105 s和132~155 s兩段區(qū)間內(nèi)加速踏板有效;在105~120 s和155~165 s兩段區(qū)間內(nèi)制動(dòng)踏板有效。在0~10 s區(qū)間內(nèi),混合動(dòng)力汽車處于從停車到起步階段,此時(shí)電機(jī)單獨(dú)工作,驅(qū)動(dòng)車輛起步;在第10 s時(shí)發(fā)動(dòng)機(jī)起動(dòng),發(fā)動(dòng)機(jī)轉(zhuǎn)速由0開始逐步上升;在第18 s和第28 s時(shí)分別經(jīng)歷了兩次升擋,進(jìn)而發(fā)動(dòng)機(jī)轉(zhuǎn)速下降;在第42~50 s區(qū)間內(nèi),電動(dòng)機(jī)轉(zhuǎn)矩為0,此時(shí)發(fā)動(dòng)機(jī)單獨(dú)驅(qū)動(dòng);在50~100 s之間,發(fā)動(dòng)機(jī)與電機(jī)同時(shí)工作,發(fā)動(dòng)機(jī)轉(zhuǎn)速與電機(jī)轉(zhuǎn)速穩(wěn)步上升,此時(shí)系統(tǒng)處于功率輔助狀態(tài);在105~120 s之間制動(dòng)踏板有效,整車進(jìn)入制動(dòng)能量回饋狀態(tài),發(fā)動(dòng)機(jī)轉(zhuǎn)速與電機(jī)轉(zhuǎn)速逐步下降至0,系統(tǒng)停車。同理,在第2個(gè)運(yùn)行周期內(nèi),當(dāng)加速踏板有效時(shí)系統(tǒng)運(yùn)行狀態(tài)依次從純電動(dòng)驅(qū)動(dòng)狀態(tài)經(jīng)歷發(fā)動(dòng)機(jī)起動(dòng)狀態(tài)切換至發(fā)動(dòng)機(jī)驅(qū)動(dòng)狀態(tài),繼而進(jìn)入功率輔助狀態(tài);當(dāng)制動(dòng)踏板有效后,系統(tǒng)運(yùn)行狀態(tài)經(jīng)歷發(fā)動(dòng)機(jī)停機(jī)狀態(tài)和能量回饋狀態(tài)直至最終的滑行停機(jī)狀態(tài)。由圖6b的對(duì)比結(jié)果可看出,該COBPNN模型能夠?qū)ぷ髂J竭M(jìn)行準(zhǔn)確預(yù)測(cè)。
5 混沌神經(jīng)網(wǎng)絡(luò)工作狀態(tài)協(xié)調(diào)控制策略研究
5.1 協(xié)調(diào)控制系統(tǒng)整車模型的建立
基于混沌神經(jīng)網(wǎng)絡(luò)工作狀態(tài)識(shí)別模型建立混合動(dòng)力汽車協(xié)調(diào)控制動(dòng)力優(yōu)化系統(tǒng)整車控制模型,如圖7所示。
圖7中,工作狀態(tài)數(shù)據(jù)處理模塊的功能是對(duì)仿真工況數(shù)據(jù)進(jìn)行預(yù)處理,如異常點(diǎn)去除、去毛刺等,然后對(duì)工作狀態(tài)數(shù)據(jù)進(jìn)行預(yù)緩沖,針對(duì)實(shí)測(cè)工作狀態(tài)設(shè)定采樣時(shí)間段,計(jì)算該采樣時(shí)間段內(nèi)工作狀態(tài)的特征參數(shù)值,并與該時(shí)間段內(nèi)的工作狀態(tài)數(shù)據(jù)共同輸出給COBPNN工作狀態(tài)識(shí)別模塊。COBPNN工作狀態(tài)識(shí)別模塊依據(jù)工作狀態(tài)的特征參數(shù)數(shù)據(jù),以采樣時(shí)間段為區(qū)間對(duì)接下來的工作狀態(tài)進(jìn)行連續(xù)預(yù)測(cè)識(shí)別,實(shí)時(shí)判斷有無工作狀態(tài)切換發(fā)生。協(xié)調(diào)控制模塊首先判斷狀態(tài)切換過程是否需要?jiǎng)討B(tài)協(xié)調(diào)控制,若需要?jiǎng)t結(jié)合協(xié)調(diào)控制策略計(jì)算發(fā)動(dòng)機(jī)油門開度、電機(jī)輸出轉(zhuǎn)矩等控制信號(hào)給整車動(dòng)力學(xué)模型,完成車輛的動(dòng)態(tài)仿真,將狀態(tài)變量輸送回所需模塊,完成閉環(huán)仿真。
5.2 協(xié)調(diào)控制算法研究
首先根據(jù)采集到的電動(dòng)機(jī)、發(fā)電機(jī)、電池特征參數(shù)的運(yùn)行數(shù)據(jù)進(jìn)行初始狀態(tài)識(shí)別并判斷混合動(dòng)力汽車是否滿足狀態(tài)切換的條件,如果不滿足則直接根據(jù)當(dāng)前混合動(dòng)力汽車運(yùn)行狀態(tài)確定發(fā)動(dòng)機(jī)和電動(dòng)機(jī)的目標(biāo)轉(zhuǎn)矩;如果滿足則進(jìn)一步判斷該狀態(tài)切換過程是否需要進(jìn)行協(xié)調(diào)控制。若需要協(xié)調(diào)控制,則向動(dòng)態(tài)協(xié)調(diào)控制算法發(fā)出狀態(tài)切換協(xié)調(diào)控制請(qǐng)求,進(jìn)入?yún)f(xié)調(diào)控制子程序,實(shí)時(shí)預(yù)測(cè)識(shí)別出所切換至的狀態(tài),并確定發(fā)動(dòng)機(jī)和電動(dòng)機(jī)的目標(biāo)轉(zhuǎn)矩;否則不進(jìn)行動(dòng)態(tài)協(xié)調(diào)控制。工作狀態(tài)協(xié)調(diào)控制算法流程如圖8所示。
5.3 混沌神經(jīng)網(wǎng)絡(luò)協(xié)調(diào)控制前、后試驗(yàn)結(jié)果對(duì)比
利用所建立的基于混沌神經(jīng)網(wǎng)絡(luò)工作狀態(tài)識(shí)別器的HEV整車控制模型對(duì)所研究的協(xié)調(diào)控制算法進(jìn)行測(cè)試和驗(yàn)證。
5.3.1 協(xié)調(diào)控制前、后整車動(dòng)力性試驗(yàn)結(jié)果對(duì)比
當(dāng)混合動(dòng)力汽車的工作狀態(tài)發(fā)生改變時(shí),發(fā)動(dòng)機(jī)和電機(jī)的工作狀態(tài)也隨之改變。但發(fā)動(dòng)機(jī)的動(dòng)態(tài)響應(yīng)慢,造成其轉(zhuǎn)矩輸出不能實(shí)時(shí)跟蹤工況轉(zhuǎn)矩需求,為此需利用電動(dòng)機(jī)良好的轉(zhuǎn)矩動(dòng)態(tài)響應(yīng)特性,通過其對(duì)發(fā)動(dòng)機(jī)的轉(zhuǎn)矩輸出誤差進(jìn)行轉(zhuǎn)矩實(shí)時(shí)動(dòng)態(tài)修正,從而將駕駛員需求轉(zhuǎn)矩在發(fā)動(dòng)機(jī)與電動(dòng)機(jī)之間進(jìn)行合理分配,以保證工作模式切換過程中動(dòng)力傳遞的平順性。圖9與圖10分別為協(xié)調(diào)控制前、后需求轉(zhuǎn)矩分配結(jié)果。
可以看出,與協(xié)調(diào)控制前相比,協(xié)調(diào)控制后發(fā)動(dòng)機(jī)的輸出轉(zhuǎn)矩變化減小,而電動(dòng)機(jī)輸出轉(zhuǎn)矩變化相對(duì)加大,即系統(tǒng)借助于電動(dòng)機(jī)的快速響應(yīng)特性補(bǔ)償了發(fā)動(dòng)機(jī)轉(zhuǎn)矩輸出時(shí)間常數(shù)大、響應(yīng)速度慢的缺陷。由圖10可看出,當(dāng)車速較低時(shí)(位置1),發(fā)動(dòng)機(jī)關(guān)閉,輸出轉(zhuǎn)矩為0,整車由電動(dòng)機(jī)單獨(dú)驅(qū)動(dòng);當(dāng)車速較高、轉(zhuǎn)矩需求較高時(shí)(位置2),電動(dòng)機(jī)轉(zhuǎn)矩接近0,整車主要由發(fā)動(dòng)機(jī)驅(qū)動(dòng);當(dāng)轉(zhuǎn)矩需求較低時(shí)(位置3),發(fā)動(dòng)機(jī)轉(zhuǎn)矩接近0,整車主要由電動(dòng)機(jī)單獨(dú)驅(qū)動(dòng);當(dāng)變速器換擋時(shí)(位置4),發(fā)動(dòng)機(jī)轉(zhuǎn)矩發(fā)生突變;當(dāng)轉(zhuǎn)矩需求為負(fù)時(shí)(位置5),發(fā)動(dòng)機(jī)關(guān)閉,系統(tǒng)由電動(dòng)機(jī)回收制動(dòng)能量。通過對(duì)仿真結(jié)果的分析可知,由電動(dòng)機(jī)轉(zhuǎn)矩進(jìn)行補(bǔ)償以調(diào)節(jié)發(fā)動(dòng)機(jī)轉(zhuǎn)矩的控制方法合理有效,保證了工況轉(zhuǎn)換過程中整車的平順性。
為進(jìn)一步考察汽車在連續(xù)換擋過程中加入?yún)f(xié)調(diào)控制策略后對(duì)整車動(dòng)力性的影響,采用連續(xù)換擋(從1擋→空擋→2擋→空擋→3擋→空擋→2擋→空擋→1擋)的方式進(jìn)行試驗(yàn),且升擋時(shí)空擋時(shí)間相對(duì)較長(zhǎng),降擋時(shí)空擋時(shí)間相對(duì)較短。圖11為汽車由驅(qū)動(dòng)模式到制動(dòng)模式不斷切換時(shí),加入?yún)f(xié)調(diào)控制策略前、后各轉(zhuǎn)矩變化曲線。
由圖11可看出,協(xié)調(diào)控制前,無論空擋還是在擋,電動(dòng)機(jī)轉(zhuǎn)矩均未對(duì)發(fā)動(dòng)機(jī)轉(zhuǎn)矩進(jìn)行補(bǔ)償,從而導(dǎo)致了總驅(qū)動(dòng)轉(zhuǎn)矩與需求驅(qū)動(dòng)轉(zhuǎn)矩之間始終存在較大差異;加入?yún)f(xié)調(diào)控制后,雖然升擋時(shí)由于換擋時(shí)間長(zhǎng)引起動(dòng)力中斷造成實(shí)際總驅(qū)動(dòng)轉(zhuǎn)矩與需求轉(zhuǎn)矩之間差異較大,但當(dāng)汽車在擋時(shí)由于加入了協(xié)調(diào)控制策略,使得電動(dòng)機(jī)轉(zhuǎn)矩補(bǔ)償了發(fā)動(dòng)機(jī)轉(zhuǎn)矩與需求驅(qū)動(dòng)轉(zhuǎn)矩之間的差值,進(jìn)而使總驅(qū)動(dòng)轉(zhuǎn)矩能夠更好地跟隨需求驅(qū)動(dòng)轉(zhuǎn)矩,總驅(qū)動(dòng)轉(zhuǎn)矩與需求驅(qū)動(dòng)轉(zhuǎn)矩曲線的吻合度明顯提高,整車動(dòng)力性得到改善。
5.3.2 協(xié)調(diào)控制前、后發(fā)動(dòng)機(jī)工作點(diǎn)分布對(duì)比
圖12為協(xié)調(diào)控制前、后發(fā)動(dòng)機(jī)工作點(diǎn)分布對(duì)比結(jié)果,圖13為協(xié)調(diào)控制前、后發(fā)動(dòng)機(jī)效率對(duì)比結(jié)果。可以看出,協(xié)調(diào)控制后發(fā)動(dòng)機(jī)工作點(diǎn)向高效區(qū)移動(dòng),發(fā)動(dòng)機(jī)效率得到了有效提升。
為驗(yàn)證混合動(dòng)力汽車協(xié)調(diào)控制前、后的燃油經(jīng)濟(jì)性,在輕載順暢、中載略堵、重載擁堵3種典型工況下進(jìn)行了試驗(yàn)測(cè)試,所測(cè)得的各典型工況下協(xié)調(diào)控制前、后油耗對(duì)比結(jié)果見表3。可知協(xié)調(diào)控制后整車燃油經(jīng)濟(jì)性得到有效改善。

表3 各種典型工況下油耗數(shù)據(jù) L/100 km
5.3.3 協(xié)調(diào)控制前、后電池SOC值對(duì)比
本文將SOC實(shí)測(cè)值與平衡值之差的均值ΔSOCm作為衡量SOC值變化的標(biāo)準(zhǔn),ΔSOCm越小說明SOC值波動(dòng)越小,平衡性越好。試驗(yàn)中設(shè)定SOC平衡值為0.6,要求SOC值在一個(gè)工作循環(huán)內(nèi)能夠重新平衡在設(shè)定值附近,且ΔSOCm的變化范圍不超過5%。圖14為協(xié)調(diào)控制前、后SOC值對(duì)比結(jié)果。從仿真結(jié)果可看出,經(jīng)協(xié)調(diào)控制后SOC從平衡值到設(shè)定值所需時(shí)間明顯縮短,且ΔSOCm從協(xié)調(diào)控制前的6%降至目前的3%,在允許的范圍內(nèi)。可見經(jīng)協(xié)調(diào)控制后,電池SOC值被更快速地維持在一個(gè)合理的范圍內(nèi),動(dòng)力電池亦具有較高的充放電效率,有利于延長(zhǎng)電池壽命。
1 李孟海.基于模型匹配控制的PHEV動(dòng)態(tài)協(xié)調(diào)控制方法.汽車工程,2007,29(3):203~219..
2 SunMing,XuYaoqun,DaiXuefeng,et al.Noise-Tuning-Based Hysteretic Noisy Chaotic Neural Network for Broadcast Scheduling Problem in Wireless Multihop Networks,IEEE Transactions on Neural Network and Learning Systems,23 (12),2012,pp:1905~1918.
3 Xu Yaoqun,He Shaoping.Fourier chaotic neural network with application in optimization.IEEE International Confer?ence on CCC,Kunming,2008,729~733.
4 何成立.并聯(lián)式混合動(dòng)力公交車及其冷卻系統(tǒng)性能仿真研究:[學(xué)位論文].濟(jì)南:山東大學(xué),2012.
5 王保華.混合動(dòng)力城市客車控制策略與試驗(yàn)研究:[學(xué)位論文].上海:上海交通大學(xué),2008.
6 殷承良,浦金歡,張建武.并聯(lián)混合動(dòng)力汽車的模糊轉(zhuǎn)矩控制策略.上海交通大學(xué)學(xué)報(bào),2006,40(1):157~162.
7 Ning,Bo,Wu,Jiutao,Peng,Hui,Zhao,Jianye.Using chaotic neural network to forecast stock index.IEEE International Conference on neural network Wuhan,2009,870~876.
8 Zhao,Yu-Hong,Xiao,Jin-Feng.Application of chaotic neural network in power system load forecasting.IEEE Internation? al Conference on Mechatronic Science,Electric Engineering and Computer,Jilin,2011,1629-1632.
(責(zé)任編輯文 楫)
修改稿收到日期為2015年2月1日。
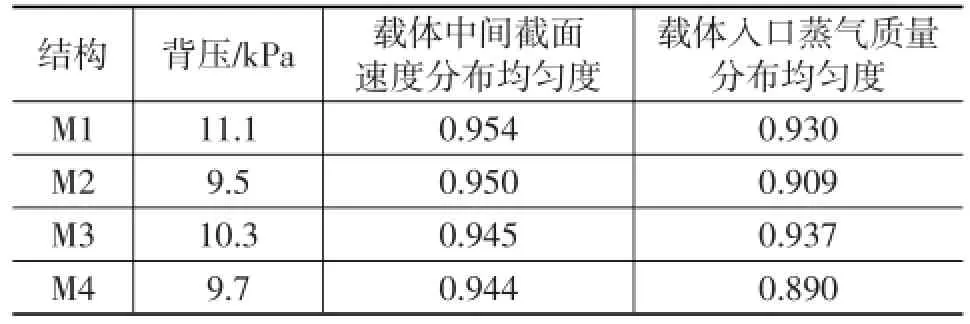
表3 CFD結(jié)果
4 集成式SCR系統(tǒng)臺(tái)架結(jié)晶試驗(yàn)
通過仿真驗(yàn)證M1符合設(shè)計(jì)目標(biāo),樣件制作完成后在濰柴動(dòng)力有限公司技術(shù)中心的發(fā)動(dòng)機(jī)臺(tái)架上進(jìn)行試驗(yàn)驗(yàn)證。
為了驗(yàn)證結(jié)晶情況,分成兩部分進(jìn)行40 h的結(jié)晶試驗(yàn):第1部分為10 h內(nèi)60個(gè)ESC循環(huán),第2部分為30 h內(nèi)60個(gè)ETC循環(huán)。試驗(yàn)結(jié)束后,SCR箱體內(nèi)未發(fā)現(xiàn)明顯的結(jié)晶現(xiàn)象,如圖13所示。
排放試驗(yàn)結(jié)果如表4所列。
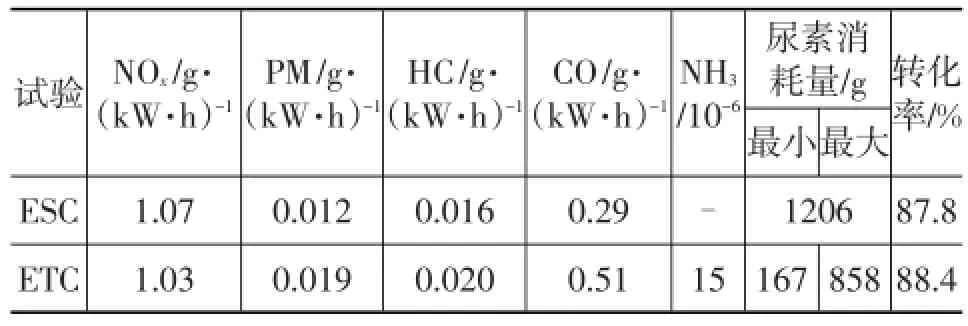
表4 排放試驗(yàn)結(jié)果
從表4中可以看出,ETC、ESC試驗(yàn)時(shí)NOx排放量小于3.5 g/(kW·h),ETC下NH3泄漏量為15×10-6,小于25×10-6,說明這種集成式結(jié)構(gòu)能滿足國IV排放標(biāo)準(zhǔn)。
5 結(jié)束語
a.首先采用CFD仿真確認(rèn)具體結(jié)構(gòu),并通過樣件試驗(yàn)相結(jié)合的方式進(jìn)行新型結(jié)構(gòu)的設(shè)計(jì)開發(fā),最終證明該方案可行。
b.雙層套管式進(jìn)口設(shè)計(jì)雖然使得進(jìn)口段的壓降比較大,基本上占到系統(tǒng)壓降的1/2,但是其有助于增加運(yùn)動(dòng)路徑,增強(qiáng)液滴粒子的蒸發(fā)效果,并減少結(jié)晶風(fēng)險(xiǎn)。
c.通過結(jié)晶試驗(yàn)和排放試驗(yàn)驗(yàn)證了新結(jié)構(gòu)的可行性,整個(gè)系統(tǒng)滿足國IV標(biāo)準(zhǔn)。
d.該集成式SCR系統(tǒng)的設(shè)計(jì)相比分體式結(jié)構(gòu)更能滿足安裝空間的要求,降低結(jié)晶風(fēng)險(xiǎn),減少維修費(fèi)用,提高轉(zhuǎn)化效率,并且能達(dá)到車廠各項(xiàng)技術(shù)要求。
參考文獻(xiàn)
1 李鵬.滿足國V排放的重型柴油機(jī)排放后處理技術(shù).車用發(fā)動(dòng)機(jī),2010(8):1~5.
2 ANSYS Inc.Fluent 6.3 User’s Guide.2006.
3 Birkhold F,Meingast U,Wassermann P,etal.Modeling and simulation of the injection of urea-water-solution for auto?motive SCR DeNOx-systems.Appl Catal B Environ,2007, 70:119~127.
4 董星濤.基于Fluent低壓旋流噴嘴下游流場(chǎng)數(shù)值模擬及分析.輕工機(jī)械,2012(10):25~28.
5 Zheng G,Sampath M,Alcini W,etal.Design Improvements of Urea SCR Mixing for Medium-Duty Trucks.SAE Techni?cal paper,2013-01-1074.
(責(zé)任編輯晨 曦)
修改稿收到日期為2015年5月1日。
Research on Hybrid Electric Vehicle State Switch Coordinated Control Strategy Based on Chaotic Neural Network
Zhang Yun1,2,Hou Lihua1,Bi Mingxuan3,Liang Chunhui1
(1.Changchun Institute of Technology;2.State Key Laboratory of Automobile Simulation&Control,Jilin University; 3.The Local Water and Electricity Bureau of Jilin)
In view of the chaos characteristics of nonlinear dynamic coupling system during the working state switching process of parallel hybrid electric vehicle(HEV)engine and electric motor,the HEV’s state switching coordinated control strategy based on chaotic neural network is proposed.The overall coordinated control model architecture is established,the chaotic neural network working state recognizer is designed,and the accuracy of the recognizer is verified through experiments.On this basis,the vehicle control platform of coordinated control system is constructed,and the simulated test is carried out for the coordinated control strategy.The results show that vehicle dynamic performance, fuel economy and batterySOCbalance are effectively improved with this control strategy,the coordinated control of the working state switching is realized.
Hybrid Electric Vehicle,Chaotic Neural Network,State Switch,Coordinated Control
混合動(dòng)力汽車 混沌神經(jīng)網(wǎng)絡(luò) 狀態(tài)切換 協(xié)調(diào)控制
U467.1+3
A
1000-3703(2015)10-0024-08
吉林省科技廳基金(201205046);國家自然科學(xué)基金(51276079)。
猜你喜歡
汽車維修與保養(yǎng)(2021年8期)2021-02-16 00:28:30
汽車維修與保養(yǎng)(2021年8期)2021-02-16 00:28:18
能源工程(2020年6期)2021-01-26 00:55:22
山東冶金(2019年3期)2019-07-10 00:54:04
消費(fèi)導(dǎo)刊(2018年10期)2018-08-20 02:57:02
通信電源技術(shù)(2016年1期)2016-04-16 04:57:26
電測(cè)與儀表(2016年20期)2016-04-11 11:38:24
汽車與新動(dòng)力(2015年1期)2015-02-27 12:11:01
電測(cè)與儀表(2014年17期)2014-04-04 11:56:50
汽車與新動(dòng)力(2014年2期)2014-02-27 12:10:15
