氣動六足壁面爬行機器人控制系統的開發
2014-12-31 08:23:04楊慧斌馬春港吳竹霞齊亞夢
中國科技信息 2014年22期
關鍵詞:機械
楊慧斌 馬春港 汪 滿 吳竹霞 齊亞夢
上海工程技術大學機械工程學院
氣動六足壁面爬行機器人是一個采用真空吸附和PLC(可編程控制器)控制技術的系統。文章詳細闡述了機器人的機械組成、氣動和控制系統以及運動順序等。機器人控制系統選用了西門子S7-200 系列PLC 作為核心,采用PLC 順序控制完成了對機器人運動控制的編程,最終實現了機器人在壁面上穩定地進行直行以及轉向運動。
概述
進入21 世紀以來,機器人在各行各業中都得到了廣泛的應用和發展,其研究與應用水平已成為一個國家經濟實力和科技發展水平的重要標志。隨著氣動技術的發展,氣動機器人的應用領域也逐漸廣泛,在一些特殊的應用場合,如安全、建筑、國防等,要求工作可靠、體積小、動作靈活的氣動爬行機器人,尤其是在壁面爬行機器人的研究。壁面爬行機器人是特種機器人的一種,是在惡劣、危險、極限等情況下進行特定作業的一種自動化機械裝置,如今越來越受到人們的重視。為使其盡快完善,對壁面爬行機器人的研究已成為機器人技術發展的熱點之一。目前壁面爬行機器人已在核工業、石化工業、建筑工業、消防部門、造船業一。目前壁面爬行機器人已在核工業、石化工業、建筑工業、消防部門、造船業等領域得到了應用。
機器人的機械結構
機器人的機械結構是機器人實現穩定運動的基礎,只有穩定的機械結構作為前提,才有可能實現機器人的爬壁運動。本文所述氣動六足壁面爬行機器人結構主要由主連接板、腳連接板、氣缸、用于支撐控制系統的上托板、護腳板、真空吸盤及連接部件構成。主連接板用于連接機器人的三個腳連接板;腳連接板用于一對足的連接,實現相連兩足的聯動;上托板用于承載氣動元件,如:電磁閥、真空閥等;護腳板用于保護機器人的足不受外界因素的影響;氣缸用于將壓縮空氣的壓力能轉換為機械能,驅動機器人運動;真空吸盤使機器人能穩定地吸附在壁面上。連接部件用于連接機器人的各個機械部分,保證機器人的機械結構的穩定性。(圖1:機械結構圖)
控制系統的開發
PLC 選型

圖1 機械結構圖
可編程控制器是一種數字運算操作的電子系統,專門在工業環境下應用而設計。它采用可以編制程序的存儲器,用來在執行存儲邏輯運算和順序控制、定時、計數和算術運算等操作的指令,并通過數字或模擬的輸入(I)和輸出(O)接口,控制各種類型的機械設備或生產過程。氣動六足機器人選用了西門子S7-200 系列PLC 作為控制系統的核心。S7-200 PLC是緊湊型可編程控制器,它結構緊湊、功能強,具有很高的性價比,在中小規模控制系統中廣泛應用,能夠滿足各種設備的自動化控制要求,而且其具有功能強大的指令集及通信指令功能,S7-200 PLC 不同于S7-300 或S7-400 系列PLC 是小型可編程控制器,由于其體積小等特點,故更適合作為小型機器人的控制核心。
I/0 點分配
熟悉機器人的運動流程,確定輸入/輸出點的個數,由此分配PLC 的I/O 點。
機器人的運動
爬壁機器人的運動是通過PLC 可編程控制器對機器人的爬行進行編程,順序控制一組電磁閥來實現機器人的運動(相應編號可參考圖2:機器人三維簡圖)。初始狀態為6 個吸盤全部吸合在壁面。

表1 I/O 分配表(氣缸和吸盤分布詳情見圖2)
直線行走運動實現的具體步驟如下:1 首先通過控制電磁閥將機器人的Z9、Z10 真空破壞,Z3、Z4 氣缸升起,即爬壁機器人的直行狀態;2Z7、Z12 真空破壞,Z1、Z6氣缸升起,Z14 直行氣缸伸出,Z1、Z6 氣缸下降,Z7、Z12 吸盤吸合,實現Z1、Z6 氣缸相應的機器人足向前移動;3Z8、Z11 真空破壞,Z2、Z5 氣缸升起,Z14 直行氣缸縮回,Z2、Z5 氣缸下降,Z8、Z11 吸盤吸合,實現Z2、Z5 氣缸相應的機器人足向前移動;4 重復以上步驟即可實現機器人直線運動。
直行運動過程中轉向運動實現的具體步驟如下:1 首先通過控制電磁閥將機器人的Z3、Z4 氣缸下降,Z9、Z10 吸盤吸合,Z7、Z8、Z11、Z12 真空破壞,Z1、Z2、Z5、Z6 氣缸升起;2Z13 轉向氣缸伸出(收縮),主連接板相對于Z3、Z4 氣缸相對應的腳連接板逆時針(順時針)轉動一定角度,即實現左轉(右轉);
3Z1、Z2、Z5、Z6 氣缸下降,Z7、Z8、Z11、Z12 吸盤吸合,機器人回到6 個吸盤全部吸合在壁面上的初始狀態。
機器人的編程與調試
順序功能圖(Sequeential Function Chart)是一種新穎、按工藝流程圖進行編程的圖形化編程語言,也是一種符合國際電工委員會(IEC)標準,被首選推薦用于可編程控制器的通用編程語言,在PLC 應用領域中應用廣泛及推廣。采用順序功能圖進行PLC 梯形圖應用編程具有以下優點:1、在程序中能直觀地看到設備的動作順序。順序功能圖程序是按照設備(或工藝)的動作順序而編寫,所以程序的規律性較強,容易讀懂,具有一定的可視性。2、在設備發生故障時能很容易的找出故障所在位置。3、不需要復雜的互鎖電路,更容易設計和維護系統。故本文選用了順序控制對機器人進行編程。機器人運動的順序功能圖如圖3:
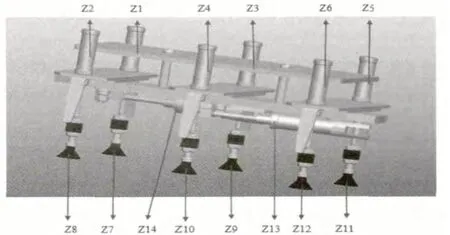
圖2 機器人三維簡圖
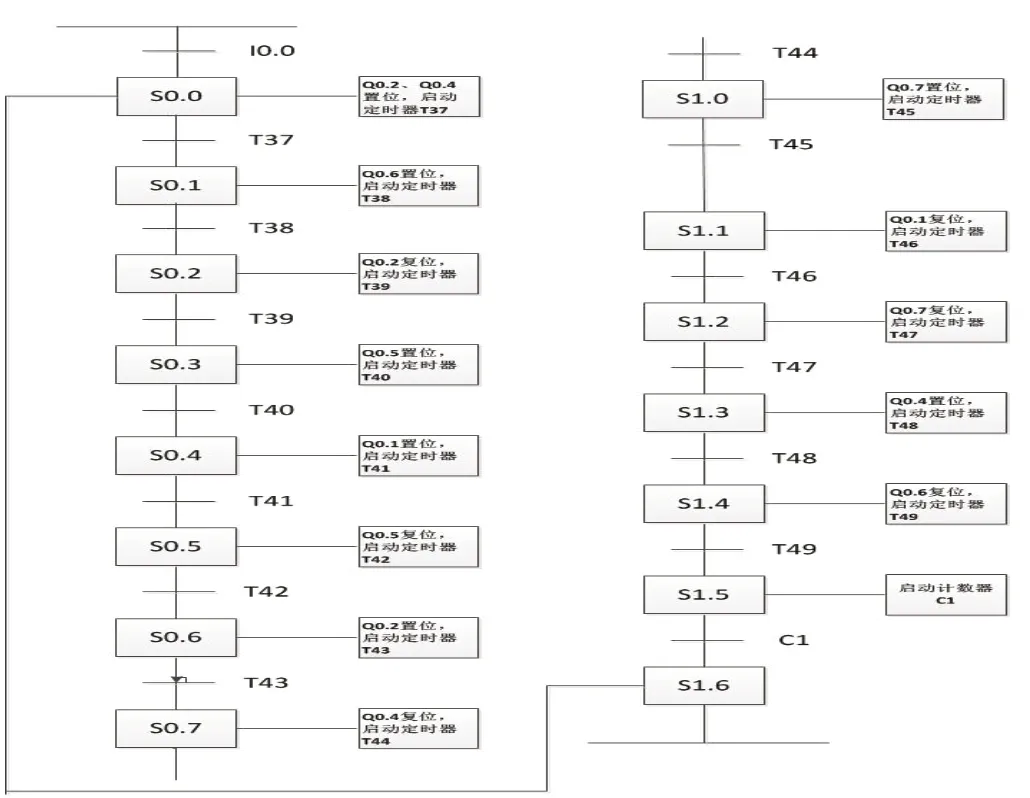
圖3 順序功能圖
依據順序功能圖編寫梯形圖程序,部分程序語句表如下:

經過對程序的逐步調試,證實所編寫程序能實現機器人的直行及轉向運動。機器人的整體調試結果:機器人能夠穩定的在壁面上進行直行以及轉向運動,達到了設計要求,甚至機器人的穩定性比預想中的更好。
結束語
隨著社會的進步和科學的發展,機器人產品在人們的工作環境中發揮著越來越重要的作用,機器人也就成為目前國內外研究的熱點課題,六足爬行機器人作為機器人的一個分支,其運動具有較強的穩定性,故而在軍事運輸、天文探測等領域就具有重要的意義,因此在國內外六足機器人均得到了廣泛研究。
猜你喜歡
機械工程材料(2022年10期)2022-11-21 12:08:44
小學科學(學生版)(2021年9期)2021-11-02 05:26:46
電腦報(2020年35期)2020-09-17 13:25:53
當代工人(2020年8期)2020-05-25 09:07:38
電腦報(2019年40期)2019-09-10 07:22:44
建材發展導向(2019年13期)2019-08-24 06:37:40
電子制作(2018年14期)2018-08-21 01:38:14
小溪流(畫刊)(2017年12期)2018-01-10 16:07:29
筑路機械與施工機械化(2017年6期)2017-07-10 11:54:50
科技知識動漫(2016年8期)2016-07-29 20:40:09