DOR測(cè)量自適應(yīng)模型重構(gòu)算法與實(shí)驗(yàn)驗(yàn)證
2014-12-28 05:46:02韓松濤唐歌實(shí)陳略曹建峰
航天器工程 2014年2期
韓松濤 唐歌實(shí) 陳略 曹建峰
(1 航天飛行動(dòng)力學(xué)技術(shù)重點(diǎn)實(shí)驗(yàn)室,北京 100094)(2 北京航天飛行控制中心,北京 100094)
1 引言
甚長(zhǎng)基線干涉測(cè)量(Very Long Baseline Interferometry,VLBI)技術(shù)能夠獲取目標(biāo)高精度的角位置信息[1],對(duì)統(tǒng)一載波測(cè)控體制的測(cè)距、測(cè)速信息形成有效補(bǔ)充[2]。通常深空探測(cè)器主動(dòng)發(fā)射具有一定頻率間隔的下行側(cè)音信標(biāo)信號(hào),進(jìn)行差分單程測(cè)距(Differential One-Way Ranging,DOR)測(cè) 量[3]。當(dāng)將兩測(cè)站的多普勒進(jìn)行差分時(shí),即可獲取目標(biāo)的差分單程多普勒(Differential One-Way Doppler,DOD)觀測(cè)量[4]。DOR/DOD 測(cè)量模式在“火星快車”(Mars Express[5-6])、隼鳥(niǎo)號(hào)(Hayabusa)、希望號(hào)(Nozomi[7-8])等探測(cè)器的導(dǎo)航測(cè)軌中得到了成功運(yùn)用。
DOR 測(cè)量的數(shù)據(jù)處理過(guò)程需要參考模型引導(dǎo)相關(guān)計(jì)算,該引導(dǎo)模型通常依靠軌道預(yù)報(bào)獲取,在目標(biāo)航天器呈現(xiàn)大時(shí)延、快變化的運(yùn)動(dòng)特點(diǎn)的情況下,軌道預(yù)報(bào)精度不可避免惡化,導(dǎo)致DOR 測(cè)量處理精度下降。本文提出一種基于側(cè)音信號(hào)相頻特性的自適應(yīng)模型重構(gòu)算法,增強(qiáng)了參考模型精度惡化情況下DOR 處理算法的適應(yīng)性與穩(wěn)定性。
2 DOR 測(cè)量基本原理
應(yīng)用于DOR 測(cè)量的單頻點(diǎn)信號(hào)是周期性正弦波,無(wú)法像射電信號(hào)處理那樣通過(guò)干涉測(cè)量方法對(duì)同一波前時(shí)延進(jìn)行判斷;通常利用DOR 信號(hào)的載波相位信息獲得高精度的時(shí)延值。
構(gòu)成基線的兩測(cè)站接收信號(hào)的側(cè)音相位φA-DOR、φB-DOR分別表示為
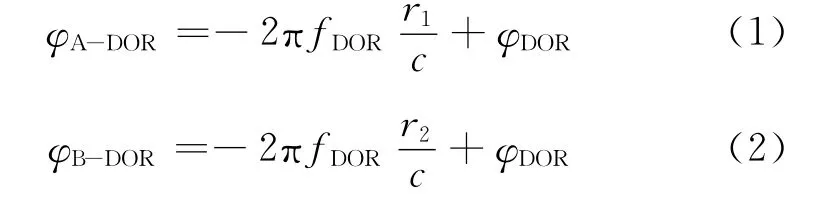
式中:fDOR為側(cè)音信號(hào)頻率;r1、r2分別為衛(wèi)星到兩測(cè)站的距離;φDOR為初始相位;c為光速。
經(jīng)相關(guān)處理計(jì)算干涉相位ΔφDOR為

載波干涉相位與目標(biāo)到兩測(cè)站的時(shí)延差直接線性相關(guān)。依據(jù)這一特性,利用衛(wèi)星下行的兩個(gè)頻率分別為fDOR-1、fDOR-2的側(cè)音信號(hào)進(jìn)行帶寬綜合處理,實(shí)現(xiàn)高精度時(shí)延τg的求解。

3 算法原理
處理算法的核心關(guān)鍵是載波相位(差)的求取,尤其是當(dāng)探測(cè)器與測(cè)站相對(duì)運(yùn)動(dòng)變化較大時(shí),此時(shí)利用軌道預(yù)報(bào)信息計(jì)算的參考模型精度相對(duì)較差,直接應(yīng)用該參考模型輔助相關(guān)處理通常結(jié)果較差,甚至無(wú)法計(jì)算正確結(jié)果。
以單測(cè)站接收信號(hào)為例,對(duì)接收信號(hào)xA(t)進(jìn)行建模,信號(hào)形式以CCSDS 規(guī)范的側(cè)音信號(hào)及采集記錄格式為標(biāo)準(zhǔn):

式中:fL-DOR為經(jīng)過(guò)下變頻后的側(cè)音信號(hào)頻率;τA(t)為探測(cè)器與測(cè)站間的傳輸時(shí)延;t為時(shí)間變量。
令N表示理論時(shí)延曲線的多項(xiàng)式階數(shù),則τA(t)表示為

此時(shí)時(shí)延率可表示為

通過(guò)估計(jì)接收信號(hào)中的多普勒頻率fd_est(t),可以獲取時(shí)延率的估計(jì)值(t)。

則最終時(shí)延估計(jì)值為

算法處理過(guò)程如下:
(1)對(duì)接收信號(hào)以積分周期為單位進(jìn)行頻率估計(jì),擬合估計(jì)結(jié)果,并按式(8)、(9)計(jì)算初始模型值。
(2)對(duì)接收信號(hào)進(jìn)行模型補(bǔ)償。
(3)更新積分周期,對(duì)補(bǔ)償后的信號(hào)同樣進(jìn)行頻率估計(jì),擬合估計(jì)結(jié)果,并計(jì)算殘余模型值。
(4)更新模型,重復(fù)步驟2~4,直至殘余積分相位小于先驗(yàn)設(shè)定閾值,迭代結(jié)束。
(5)對(duì)基線兩測(cè)站采集數(shù)據(jù)分別進(jìn)行模型重構(gòu),進(jìn)行差分處理,得到差分時(shí)延模型。
(6)利用某一時(shí)刻點(diǎn)的軌道參數(shù)信息,計(jì)算獲取差分時(shí)延模型中的常數(shù)項(xiàng)。
其中先驗(yàn)設(shè)定閾值通常以數(shù)據(jù)的殘余模型無(wú)相位模糊為準(zhǔn)。
4 實(shí)驗(yàn)結(jié)果
近年來(lái)中國(guó)深空網(wǎng)建設(shè)的步伐逐步加快,為評(píng)估深空干涉測(cè)量信號(hào)處理中心的數(shù)據(jù)處理分析能力和精度,驗(yàn)證后續(xù)與歐洲航天局(ESA)開(kāi)展干涉測(cè)量協(xié)同工作的正確性、匹配性,經(jīng)與ESA 協(xié)調(diào),獲取了歐洲航天局深空站對(duì)“金星快車”軌道器的DOR觀測(cè)實(shí)驗(yàn)數(shù)據(jù),實(shí)驗(yàn)數(shù)據(jù)采集時(shí)間為2012年8月1日,實(shí)驗(yàn)測(cè)站包括塞夫雷羅斯和新諾舍深空站,基線長(zhǎng)度約11 650km[9]。
本次DOR 實(shí)驗(yàn)對(duì)X 頻段殘余載波及高階諧波信號(hào)進(jìn)行采集記錄。圖1顯示了接收信號(hào)頻譜特性,其中通道1為主載波,通道2為+2次諧波,通道3為-14次諧波,通道4為+20次諧波,采樣頻率為50kHz。
應(yīng)用模型重構(gòu)算法對(duì)采集數(shù)據(jù)進(jìn)行處理,其中初始模型的計(jì)算積分時(shí)間為62.5ms,圖2顯示了每次迭代處理后的殘余積分相位,可以看到經(jīng)過(guò)3次迭代后,殘余積分相位無(wú)模糊現(xiàn)象,算法收斂。
在準(zhǔn)確獲取引導(dǎo)模型后,進(jìn)行相關(guān)處理計(jì)算DOR 及DOD 觀測(cè)量,其中積分時(shí)間為1s,如圖3所示。

圖1 “金星快車”信號(hào)頻譜Fig.1 Spectrum of downlink signal of VEX
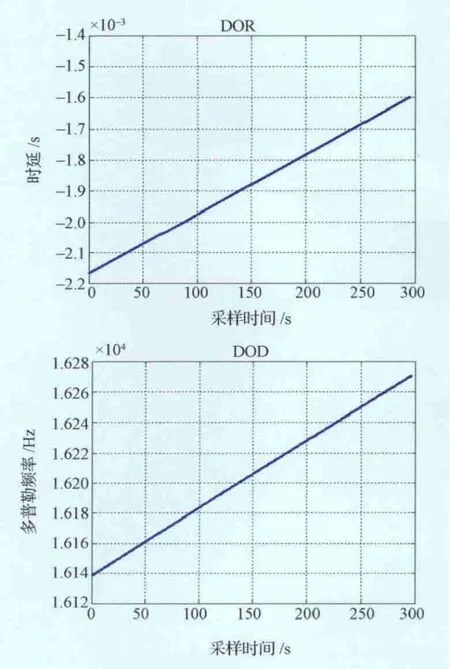
圖3 實(shí)驗(yàn)結(jié)果Fig.3 Experiment results
以ESA 提供的跟蹤數(shù)據(jù)通報(bào)(Tracking Data Message,TDM)文件中的觀測(cè)量作為真值,將干涉相關(guān)處理結(jié)果進(jìn)行鐘差修正后,擬合插值到同步時(shí)刻點(diǎn),統(tǒng)計(jì)測(cè)量值與真實(shí)值的均方根誤差為0.693ns。
依據(jù)干涉測(cè)量原理,對(duì)探測(cè)器目標(biāo),時(shí)延誤差與測(cè)角精度的關(guān)系式近似為

式中:B為基線;θ為基線向量與視向的夾角;δτ為時(shí)延精度;δθ為角位置精度。帶入基線參數(shù),可得實(shí)驗(yàn)觀測(cè)弧段內(nèi)的角位置精度在5.2毫角秒量級(jí)。
DOD 統(tǒng)計(jì)精度為0.005 Hz,依據(jù)多普勒頻率與相對(duì)速度的關(guān)系式

式中:f為信號(hào)頻率;δf為多普勒精度;δv為速度精度。帶入側(cè)音信號(hào)頻率參數(shù),可得實(shí)驗(yàn)觀測(cè)弧段內(nèi)的速度測(cè)量精度在0.2mm/s量級(jí)。
5 結(jié)束語(yǔ)
本文結(jié)合深空探測(cè)器大時(shí)延、快變化的特點(diǎn),提出了一種基于側(cè)音相頻特性的自適應(yīng)模型重構(gòu)算法,極大增強(qiáng)了先驗(yàn)軌道模型精度有限情況下的DOR 處理算法的適應(yīng)性與穩(wěn)定性。
對(duì)“金星快車”環(huán)金星軌道DOR 測(cè)量數(shù)據(jù)的處理結(jié)果表明,對(duì)應(yīng)5min觀測(cè)弧段,采用6階多項(xiàng)式重構(gòu)時(shí)延參考模型,DOR 結(jié)果精度優(yōu)于ns量級(jí),驗(yàn)證了算法的有效性。本文研究工作為后續(xù)我國(guó)深空探測(cè)工程中的探測(cè)器測(cè)控具有一定的借鑒意義。
致謝
感謝歐洲航天局地面控制中心(ESOC)測(cè)控專家Eric Soerensen和Gerhard Billig提供的數(shù)據(jù)資源及技術(shù)討論意見(jiàn)。
(References)
[1]朱新穎,李春來(lái),張洪波.深空探測(cè)VLBI技術(shù)綜述及我國(guó)的現(xiàn)狀和發(fā)展[J].宇航學(xué)報(bào).2010,31(8),P1893-1899 Zhu Xinying,Li Chunlai,Zhang Hongbo.Asurvey of VLBI technique for deep space exploration and trend in China current situation and development[J].Journal of Astronautics,2010,31(8):1893-1899(in Chinese)
[2]Bagri D S,Majid W A.Estimating accurate relative spacecraft angular position from deep space network very long baseline interferometry phases using X-band telemetry or differential one-way ranging tones,IEEEAC-1557[R].New York:IEEE,2007
[3]唐歌實(shí).深空測(cè)控?zé)o線電測(cè)量技術(shù)[M].北京:國(guó)防工業(yè)出版社,2012 Tang Geshi.Radiometric measurement technique for deep space navigation[M].Beijing:National Defense Industry Press,2012(in Chinese)
[4]吳偉仁,王廣利,節(jié)德剛,等.基于ΔDOR 信號(hào)的高精度VLBI技術(shù)[J].中國(guó)科學(xué):信息科學(xué),2013,43(2):185-196 Wu Weiren,Wang Guangli,Jie Degang,et al.Highaccuracy VLBI technique usingΔDOR signals[J].Science China:Information,2013,43(2):185-196 (in Chinese)
[5]Border J S.Innovations in delta differential one-way range:from Viking to Mars Science Laboratory[C]//21st International Symposium on Space Flight Dynamics.Washington D.C.:2009:1-16
[6]Bagri D S,Majid W A.Accurate spacecraft angular position from DSN VLBI phases using X-band telemetry or DOR tones[C]//2009IEEE Conference on Aerospace.New York:IEEE,2009:1-7
[7]Kikuchi F,Kono Y,Ping J S.VLBI observation by receiving narrow bandwidth signal from Nozomi[R].Tokyo:Communications Research Laboratory,2003
[8]Ichikawa R.Hayabusa VLBI observations for development of deep space tracking preliminary report[R].Tokyo:Communications Research Laboratory,2004
[9]James N,Abello R,Lanucara M.Implementation of an ESA delta-DOR capability[J].Acta Astronautica,2009,64(11):1041-1049
猜你喜歡
童話王國(guó)·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
鴨綠江(2021年35期)2021-04-19 12:24:18
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
考試與評(píng)價(jià)·高一版(2020年6期)2020-11-02 02:45:24
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2019年9期)2019-11-25 07:33:02
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2019年3期)2019-04-25 06:20:54
電子制作(2018年11期)2018-08-04 03:25:42
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2018年3期)2018-05-31 08:52:45
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19