一種提高我國空間站中繼測控覆蓋率的方法
2014-12-28 05:45:42
航天器工程 2014年2期
(中國空間技術研究院載人航天總體部,北京 100094)
1 引言
航天器測控與通信系統的主要任務是與地面測控系統一起,建立一個滿足預定要求的、穩定可靠的無線電傳輸通道,保證天-地無線測控信息的可靠傳輸。影響無線電傳輸通道建立的主要因素有發射機的發射功率、信號頻率、通信距離、天線增益、天線覆蓋區域等。其中,天線覆蓋率的大小對通信鏈路的建立至關重要[1-2]。
中繼衛星系統可以用于對中、低軌道航天器進行測控和數據中繼的測控通信,它既能直視中低軌道航天器,又能直視地面站,是航天器與地面站之間通信的橋梁,能夠有效擴大中、低軌道航天器測控通信覆蓋范圍[3-4]。
與我國載人航天一期、二期工程中的載人航天器相比,空間站在軌時間更長并需要開展大量科學試驗,同時為了保證航天員的安全以及在軌試驗數據的實時下傳,需要盡可能大的測控覆蓋率。本文根據我國中繼衛星以及空間站的空間幾何關系,對中繼天線不同安裝位置對中繼測控覆蓋率的影響,結合空間站在軌組建過程,提出了一種采用不同艙段的2副中繼天線融合使用并通過調整天線安裝布局提高中繼測控覆蓋率的方法,該方法實現了空間站中繼天線100%的測控覆蓋率,最后通過仿真分析,驗證了該方法的有效性和正確性。
2 中繼天線覆蓋率分析
中繼測控通信涉及到3部分:①配置于地球靜止軌道上的兩顆或多顆中繼衛星;②用戶航天器:中繼衛星系統的主要用戶是中低軌道的各種航天器,尤其是要求高軌道覆蓋率的載人航天器和高數據傳輸率的航天器等;③地面測控終端站,它與用戶航天器之間的測控通信是通過中繼衛星與用戶航天器之間建立的通信鏈路轉發[5-6]。
我國第一代中繼衛星系統包括3顆衛星:天鏈-1衛星為首發星,于2008年發射;天鏈-2衛星于2011年發射,天鏈-3衛星于2012年發射。3顆中繼衛星形成的最大夾角為160°,如圖1所示。我國載人航天器中繼天線一般采用機械轉動天線,它能夠通過伺服控制器驅動轉動機構改變天線的俯仰角和方位角,使天線指向中繼衛星。中繼天線通過縱橫的X/Y軸實現俯仰0~90°,方位0~360°的轉動[7-8]。假設我國空間站采用傾角為42°、高度為400km 的圓軌道,空間站的中繼天線安裝位置為III象限線上(對天面),中繼天線的測控覆蓋率仿真結果如圖2所示,圖中白色曲線為空間站星下點軌跡,綠色、紅色、藍色分別為天鏈-1、2、3衛星的覆蓋區域。可以看出,在我國目前3顆中繼衛星定點位置情況下,中繼覆蓋率約為88.35%,在北美上空形成了不可見的區域。
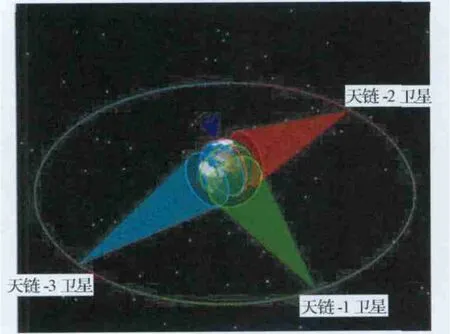
圖1 天鏈-1、2、3衛星定點示意圖Fig.1 Sketch map of Tianlian-1、2、3
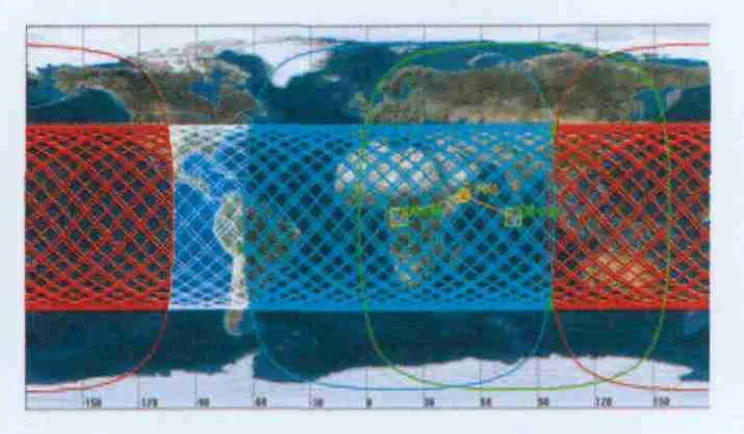
圖2 中繼天線覆蓋率Fig.2 Coverage rate of relay antenna
3 提高空間站中繼測控覆蓋率的途徑
根據測控通信基礎理論,中繼衛星與空間站之間可通信的條件為:①中繼衛星與空間站可視,即在某時刻,空間站與中繼衛星之間的連線與地球沒有交點;②空間站處于中繼衛星天線的波束照射范圍內,同時中繼衛星也處于空間站中繼天線的照射范圍內。上述兩條件同時滿足時才能保證中繼衛星與空間站通信。設中繼衛星經度差為θ,H為空間站與中繼衛星可見所需的最小軌道高度,中繼衛星經度夾角與空間站可見高度幾何關系如式(1)所示。

式中:r=6378km 為地球半徑,R=42 164km 為中繼衛星與地心距離,cosδ=r/R。
根據式(1),圖3給出了中繼衛星的經度差θ和空間站與中繼衛星可見所需的最小軌道高度H的關系圖。由圖3可知,在我國中繼衛星最大經度差為160°的情況下,要滿足中繼衛星與空間站可視條件,空間站需要的最低軌道高度為340km,而我國空間站的軌道高度為350~450km,因此,我國空間站中繼天線覆蓋率在理論上能夠達到100%。如圖4中的黃線所示,若空間站中繼天線的俯仰角能夠大于90°,即可以實現空間站中繼天線與中繼衛星建立通信鏈路。
通過上述分析,提高我國空間站中繼覆蓋率可通過以下3種方法實現:①空間站中繼天線具備俯仰角大于90°的指向能力;②通過空間站調姿使中繼天線指向中繼衛星;③調整空間站中繼天線的安裝布局。我國空間站中繼天線一般采用機械轉動天線,天線通過伺服控制器驅動轉動機構改變天線的俯仰角和方位角,使天線指向中繼衛星。方法①、②對中繼天線的轉動機構要求較高,且代價較大,方法③相對簡單,工程實施代價小。考慮到空間站將采用單艙發射、在軌組裝逐步建成的方案,每個艙段單獨發射時都配置了中繼天線,本文采用不同艙段的中繼天線融合使用并調整天線布局的方法提高覆蓋率。
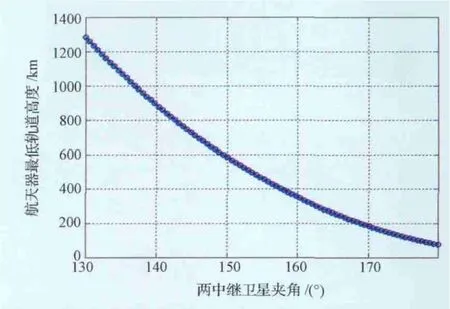
圖3 兩中繼衛星夾角與航天器軌道高度的關系圖Fig.3 Spacecraft orbit min.altitude vs.angle between two relay satellites
4 空間站中繼天線安裝位置分析
空間站中繼天線位置確定的原則為:既要保證每個艙段單獨發射時的覆蓋率,又要保證空間站組合體時的中繼覆蓋率最大。根據天線的安裝要求,中繼天線可以安裝在艙體的不同位置,但中繼衛星為地球靜止軌道衛星,軌道高度遠遠高于我國空間站,中繼天線安裝在艙體的對天面時,對于中繼天線跟蹤中繼衛星最有利,因此,本文主要針對天線安裝在對天面的情況進行分析。為了方便地說明中繼天線的安裝位置,首先建立一個坐標系,如圖5所示,空間站的III象限(對天面)線定義為0°,I象限(對地面)線定義為180°。仿真參數如表1所示,仿真角度為0°~50°,310°~350°(對天面),角度間隔取10°,表2給出了中繼天線的不同安裝角度時的測控覆蓋率,由仿真結果可知,當中繼天線安裝于III象限線(0°)時,覆蓋率為88.347 13%,中繼天線安裝角度與III象限20°時測控覆蓋率達到了最大值,為88.713 56%。
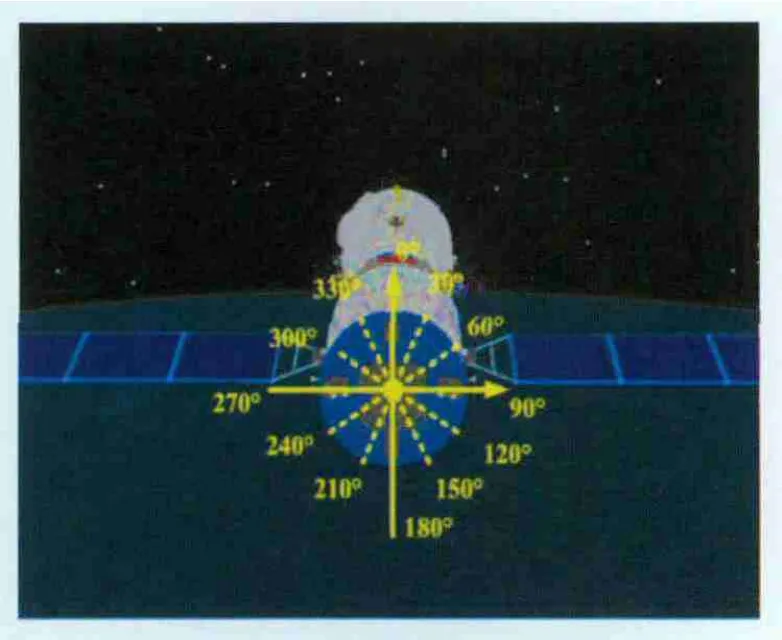
圖5 中繼天線安裝角度坐標系定義Fig.5 Sketch map of coordinate system
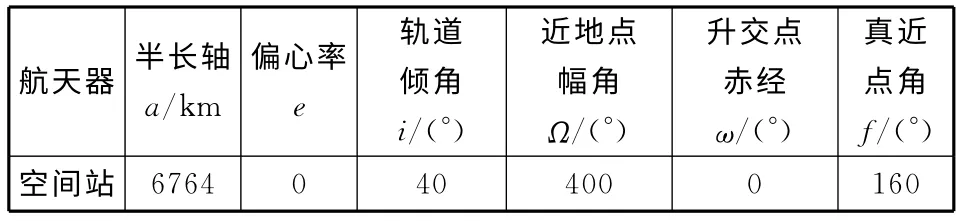
表1 空間站軌道仿真參數Table 1 Simulation parameters of space station orbit
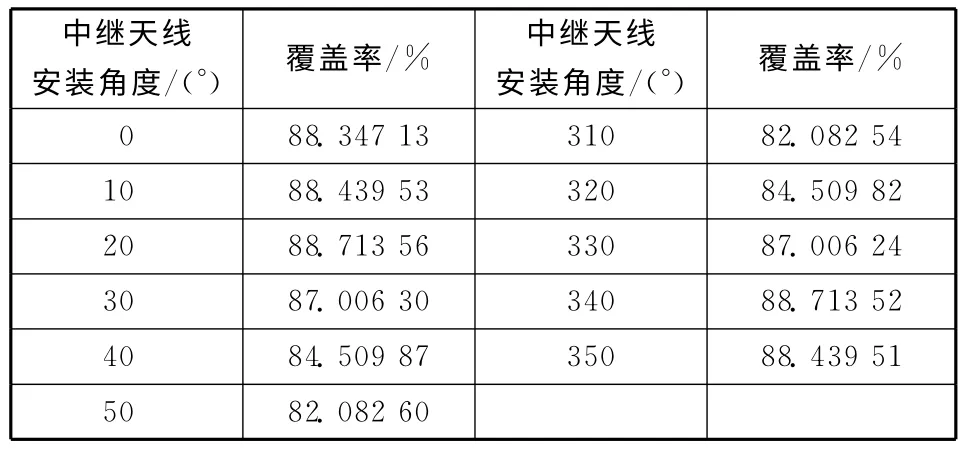
表2 中繼天線的不同安裝角度時的測控覆蓋率Table 2 Relation between coverage rate and mounting angle of antenna
根據我國空間站的構型設計及飛行方向,空間站中的兩個艙體軸線處于平行狀態,為了便于說明,將兩個艙體中繼天線等效在圖5的同一個坐標系下。根據上述單副中繼天線的覆蓋率仿真結果,對中繼天線2安裝角度分別取0°~350°時的測控覆蓋率進行仿真分析,仿真參數同表1。
圖6給出了兩副中繼天線不同安裝角度時的測控覆蓋率的仿真結果,其中橫軸分別為中繼天線1、2的安裝角度,縱軸為覆蓋率。可以看出,通過采用兩副中繼天線可保證中繼測控覆蓋率達到100%。根據上述仿真結果,結合表2中單副中繼天線的覆蓋率,在滿足兩中繼天線測控覆蓋率達到100%的前提下,中繼天線1、中繼天線2安裝角度為30°和330°時,也能夠保證單艙的中繼覆蓋率最大,分別為87.006 30%和87.006 24%。值得指出的是,仿真中并未考慮空間站艙體及太陽翼遮擋等因素,同時忽略了中繼天線轉動及重新捕獲的時間。在具體工程實現中由于上述因素的影響,中繼覆蓋率會有所降低。
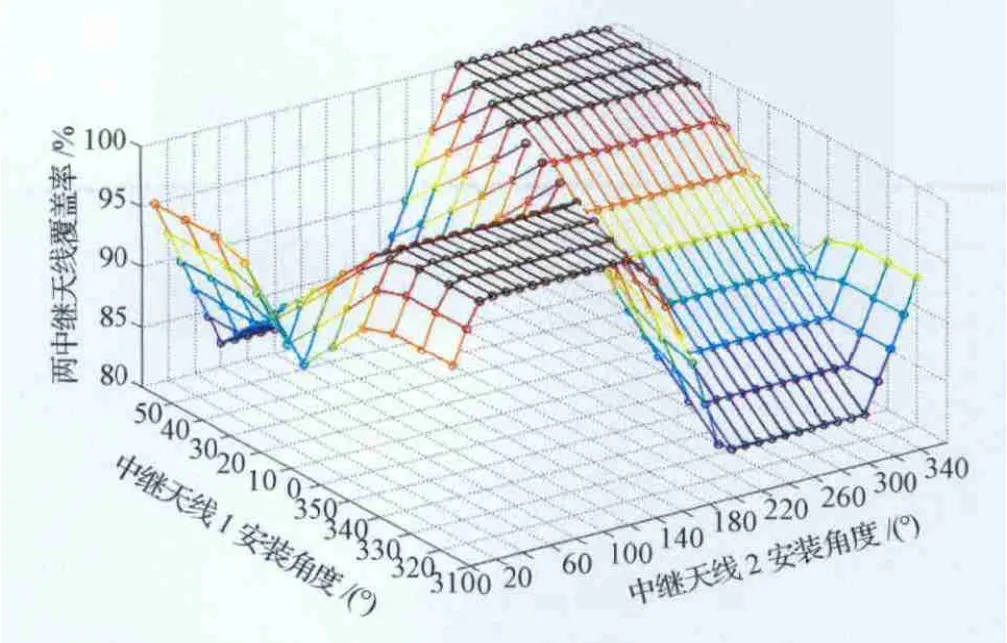
圖6 兩副中繼天線不同安裝角度時測控覆蓋率的仿真結果Fig.6 Simulation results of the coverage rate for two antennas
根據分析結果,圖7給出了中繼天線1、中繼天線2安裝角度分別為30°和330°時的幾何示意圖,圖8為兩中繼天線布局調整后天線覆蓋范圍仿真結果。如圖中黃線所示,在天鏈-2、3衛星中間的區域(圖2中北美上空的空白區域),空間站與中繼衛星之間均能夠建立通信鏈路,從而保證中繼測控的覆蓋率達到了100%。
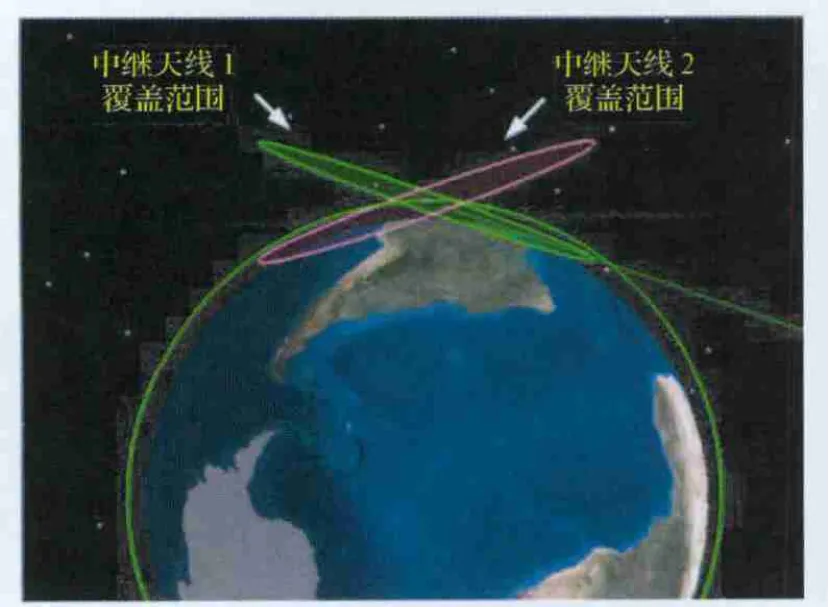
圖7 中繼天線調整后覆蓋范圍Fig.7 Coverage area of antenna after adjustment
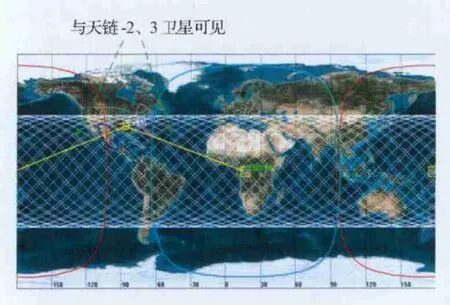
圖8 中繼天線調整后覆蓋范圍仿真結果Fig.8 Simulation results of coverage area
5 結論
對于長期載人的空間站來說,為了保證航天員的安全以及在軌試驗數據的實時下傳,需要盡可能大的測控覆蓋率。本文根據中繼衛星的定點位置,對提高我國空間站中繼測控覆蓋率的途徑進行了研究,提出了一種采用不同艙段的兩副中繼天線融合使用并通過調整天線安裝布局提高中繼的測控覆蓋率的方法。理論分析和仿真結果表明,該方法能夠有效地提高空間站中繼的測控覆蓋率。如前所述,影響空間站中繼測控覆蓋率的因素很多,本文所提的覆蓋率仿真結果并未考慮空間站艙體及太陽翼遮擋等因素,同時忽略了中繼天線轉動及重新捕獲的時間,這些因素會導致覆蓋率有所降低。因此,考慮艙體、太陽翼遮擋時的覆蓋率計算及中繼天線捕獲跟蹤策略是下一步需要深入研究的方向。
(References)
[1]陳宜元,殷禮明.衛星無線電測控技術[M].北京:中國宇航出版社,2007 Chen Yiyuan,Yin Liming.Satellite TT&C technology[M].Beijing:China Astronautics Press,2007 (in Chinese)
[2]王家勝.數據中繼衛星系統的研制與分析[J].航天器工程,2008,17(5):7-12 Wang Jiasheng.Development and analysis of data relay satellite system [J].Spacecraft Engineering,2008,17(5):7-12(in Chinese)
[3]王家勝.中國數據中繼衛星系統及其應用拓展[J].航天器工程,2013,22(1):1-6 Wang Jiasheng.China's data relay satellite system and its application prospect[J].Spacecraft Engineering,2013,22(1):1-6(in Chinese)
[4]王家勝.我國數據中繼衛星系統發展建議[J].航天器工 程,2011,20(2):1-8 Wang Jiasheng.Proposal for developing China's data relay satellite system [J].Spacecraft Engineering,2011,20(2):1-8(in Chinese)
[5]李于衡,易克初,田紅心.跟蹤與數據中繼衛星(TDRS)跟蹤用戶星的條件分析[J].空間科學學報,2006,26(5):377-381 Li Yuheng,Yi Kechu,Tian Hongxin.Term analysis of a TDRS tracking a user satellite[J].Chinese Journal of Space Science,2006,26(5):377-381(in Chinese)
[6]潘曉剛,周海銀,趙德勇.基于TDRSS的低軌衛星定軌方法研究[J].宇航學報,2006,27(z1):50-55 Pan Xiaogang,Zhou Haiyin,Zhao Deyong.Research on the LEO satellite determination based on Tracking and Data Relay Satellite System [J].Journal of Astronautics,2006,27(z1):50-55(in Chinese)
[7]王振河.TDRSS航天器用戶終端一體化設計初探[J].飛行器測控學報,2009,28(5):14-18 Wang Zhenhe.Research on integrated design of TDRSS customer spacecraft terminals[J].Journal of Spacecraft TT&C Technology,2009,28(5):14-18(in Chinese)
[8]熊小莉.中繼衛星系統用戶終端關鍵技術分析[J].電訊技術,2010,50(7):1 6-20 Xiong Xiaoli.Key technology analysis on user terminals of data relay satellite system [J].Telecommunication Engineering,2010,50(7):16-20(in Chinese)