高速鐵路長波不平順的相對測量整道
2014-12-25 02:11:46朱洪濤吳維軍
鐵道建筑 2014年8期
魏 暉,朱洪濤,吳維軍,王 群,龔 杰
(1.南昌大學 機電工程學院,江西 南昌 330031;2.江西科技學院汽車工程學院,江西南昌 330098;3.江西日月明鐵道設備開發有限公司,江西南昌 330029;4.南昌鐵路局九江橋工段,江西九江 332000)
高速鐵路要求其軌道結構必須具備高平順性[1],不僅體現在對10和20 m軌向、高低、軌距、水平等常規軌道幾何參數的嚴格控制,而且對鋼軌平直度,與軌頭表面狀態有關的短波不平順,與橋梁、道床、路基變形和軌道鋪設精度直接相關的中長波不平順幅值的控制亦十分嚴格。
對于長波不平順的控制,目前我國主要是通過動態檢測發現長波不平順的大概位置[2],然后進行精確測量,獲得軌道在高程及平面的偏差,最后通過大機作業恢復線路技術狀態。由于涉及軌道外部幾何尺寸的測量,故軌道的精確測量效率不高,且環境適應性較差,僅適用于軌道周期檢修。另外,由于軌道測量儀的絕對測量要依據CPⅢ網,當CPⅢ網受到破壞,測量儀常難以獲得高質量的數據。
本文利用具備70 m長波功能的0級軌道檢查儀指導高鐵有砟軌道的經常保養,通過合理的工藝設計,有效保證軌道高平順性,為高鐵有砟軌道的長波控制提供新的思路。
1 長波不平順及其測量
1.1 長波不平順
依據波長范圍,不平順可分為短波、中波和長波不平順。其中,波長在30~200 m的不平順稱之為長波不平順[1,3]。車體都有自振(固有)頻率,當列車以速度v運行時,可能使列車產生共振的線路不平順最不利波長 l=v/(3.6f)[4-5]。其中,v為行車速度,km/h;f為車體橫向自振頻率,Hz。通過對車輛—軌道耦合系統空間耦合模型輸入軌道隨機激擾進行數值仿真可知[3,6],車體橫向和垂向加速度表現為1 ~2 Hz的低頻振動,橫向主頻較垂向低。不同行車速度下諧波不平順最不利波長如表1所示,可知如保證高鐵的高平順性,需關注60~120 m間的長波不平順。

表1 不同行車速度下諧波不平順最不利波長 m
1.2 長波不平順的測量
目前,應用于高鐵的平順性檢測技術依據有無輪載,可分為動態檢測[1,7-8]與靜態檢測[1,9]兩類。其中,動態檢測設備主要包括軌檢車、動檢車以及添乘儀等,而靜態檢測設備除手工設備外,還包括軌道檢查儀以及軌道測量儀等自動化設備(圖1)。由于動態檢測方式對正常運營影響小、效率高、速度快,且真實地反映了在列車運行條件下的基礎設施狀態,已經成為高速鐵路平順性狀態的主要檢測手段。然而,動態檢測裝備的購置與使用成本高,尚無法做到高鐵線路的全覆蓋。另外,困擾動檢在工務養護中應用的另一個重要原因是,其病害里程的準確標識與病害幅值的現場核實均較為困難[7,10]。因此,動態檢測與靜態檢測之間,應為互補而非替代關系。目前軌道檢測形成了“動態檢查為主,動、靜態檢查相結合”的格局。
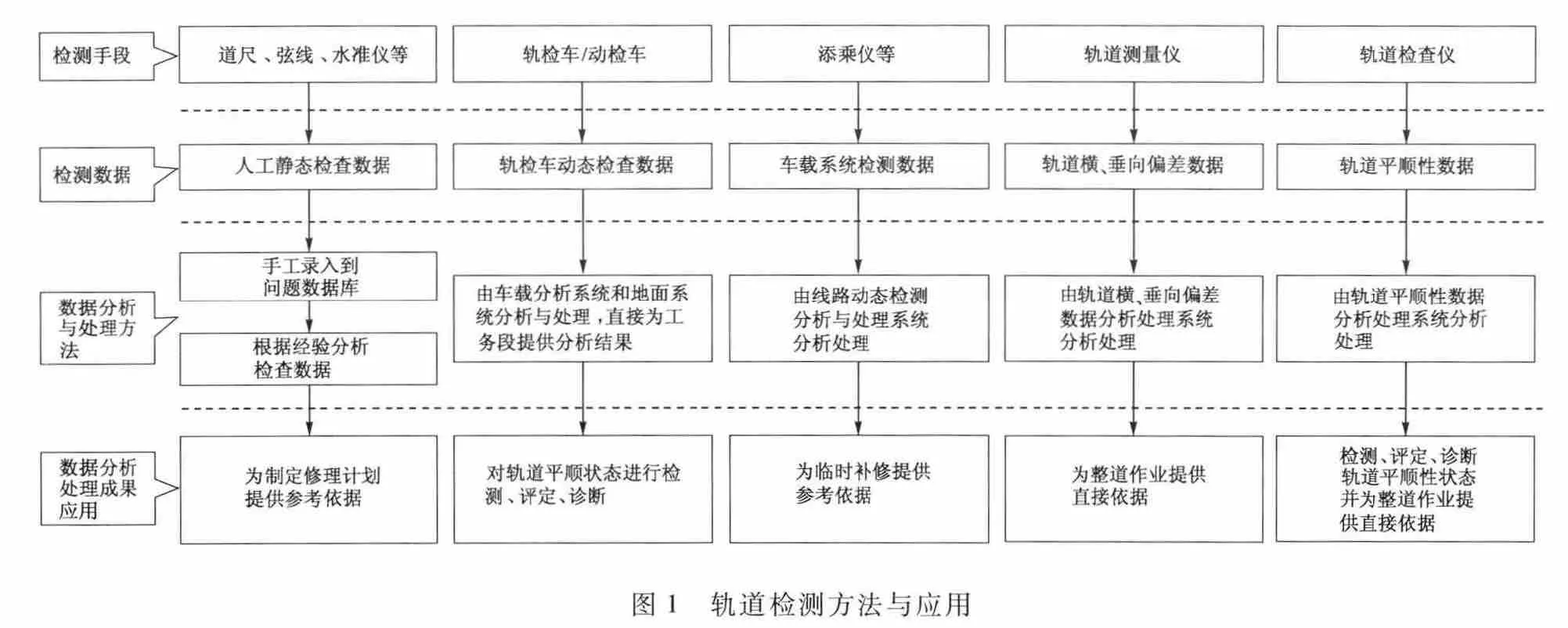
手工手段檢測長波不平順將會非常困難,且嚴重依賴技術人員的經驗與技術水平。而以軌道測量儀為基礎的絕對測量技術雖可測量長波,但如前所述其效率與經常保養作業要求間存在嚴重的不匹配。
2 0級軌道檢查儀及其相對測量直接調軌技術
2.1 0級軌道檢查儀
軌道檢查儀[11]采用電子、傳感技術移動測量并自動記錄軌道內部幾何參數,包括10 m和20 m軌向(正矢)、高低、軌距、軌距變化率、水平、扭曲(三角坑)等短波不平順,以及70 m、5 m/30 m校核、150 m/300 m校核軌向、高低等長波不平順,用于評價新建鐵路或運營線路的軌道幾何狀態,報告超限處所與超限量值。
新修訂的行業標準對軌道檢查儀進行了分級,新增了適用于≤350 km/h線路的0級軌道檢查儀,將過去使用的軌道檢查儀定義為1級軌道檢查儀并規定其使用于≤200 km/h線路。其中,GJY-T-EBJ-3型0級軌道檢查儀相對于1級軌道檢查儀除精度升級外,更針對線路運營養護維修,開發了“軌枕定位+長波精測+圖上作業(圖上劃撬)”的功能組合,在此基礎上實現了相對測量直接調軌。
2.2 相對測量直接調軌技術
相對測量直接調軌技術是以軌道內部幾何形位控制為主導的整道技術。該技術以具備長波精測功能的0級軌道檢查儀為技術平臺,以軌道平順性為控制對象,采用慣性軌跡原理,通過圖上作業,直接依據軌道檢查儀的測量成果進行整道作業。其主要特點:
1)采用軌枕標記功能將軌道病害及調整量與軌枕對應,可有效克服夜間作業定位不準的問題。
2)采用圖上劃撬,作業效果實時顯示,故可以做到先評價后實施。
3)通過長波精測,可以有效找到線路病害原因,且整道方案的制定基于長波信息,可整體優化軌道平順性。
4)對控制網及光照條件無要求,測量效率高,適應性強。
3 基于相對測量直接調軌的長波不平順整道工藝
3.1 軌道長波不平順整道流程
軌道長波不平順的整道基本流程與軌道的經常保養基本類似,大致包含動態測量數據分析、確定病害地點、現場靜態測量確認、檢測資料綜合分析、制定作業方案、作業方案審批、上報日天窗作業計劃、作業方案實施、作業質量回檢以及填寫作業日志等步驟,具體如圖2所示。
軌道長波不平順整道工藝過程是指采用相應的整道方法作用于軌道,使其平順性符合作業標準的全部勞動過程。現有的長波整道工藝[2]主要問題在于效率不匹配,而夜間短天窗更加劇了這種不匹配。本文圍繞作業效率問題介紹基于相對測量直接調軌的軌道長波不平順整道的軌道測量與內業處理工藝要點。
3.2 軌道長波不平順的快速測量
0級軌檢儀采用慣性基準測量軌道的平順性,測量速度通常為4 km/h,測量效率遠高于絕對測量。為確保測量精度,長波整道時應采用長波精測模式,綜合測量速度可達2 km/h。從圖2可知,動檢波形是確定軌道長波靜態精確測量的位置和范圍的依據。設動檢里程誤差±100 m,而長波平順性的起終算距離各35 m,并應在兩端預留不小于35 m的觀測范圍,因此長波靜態精確測量范圍通常不小于500 m。這樣,軌道的長波不平順測量可在30 min內完成,具有顯著的效率優勢。具體測量流程如圖3所示。由于采用了軌枕定位技術與長波精測模式,在進行相對測量時應注意:
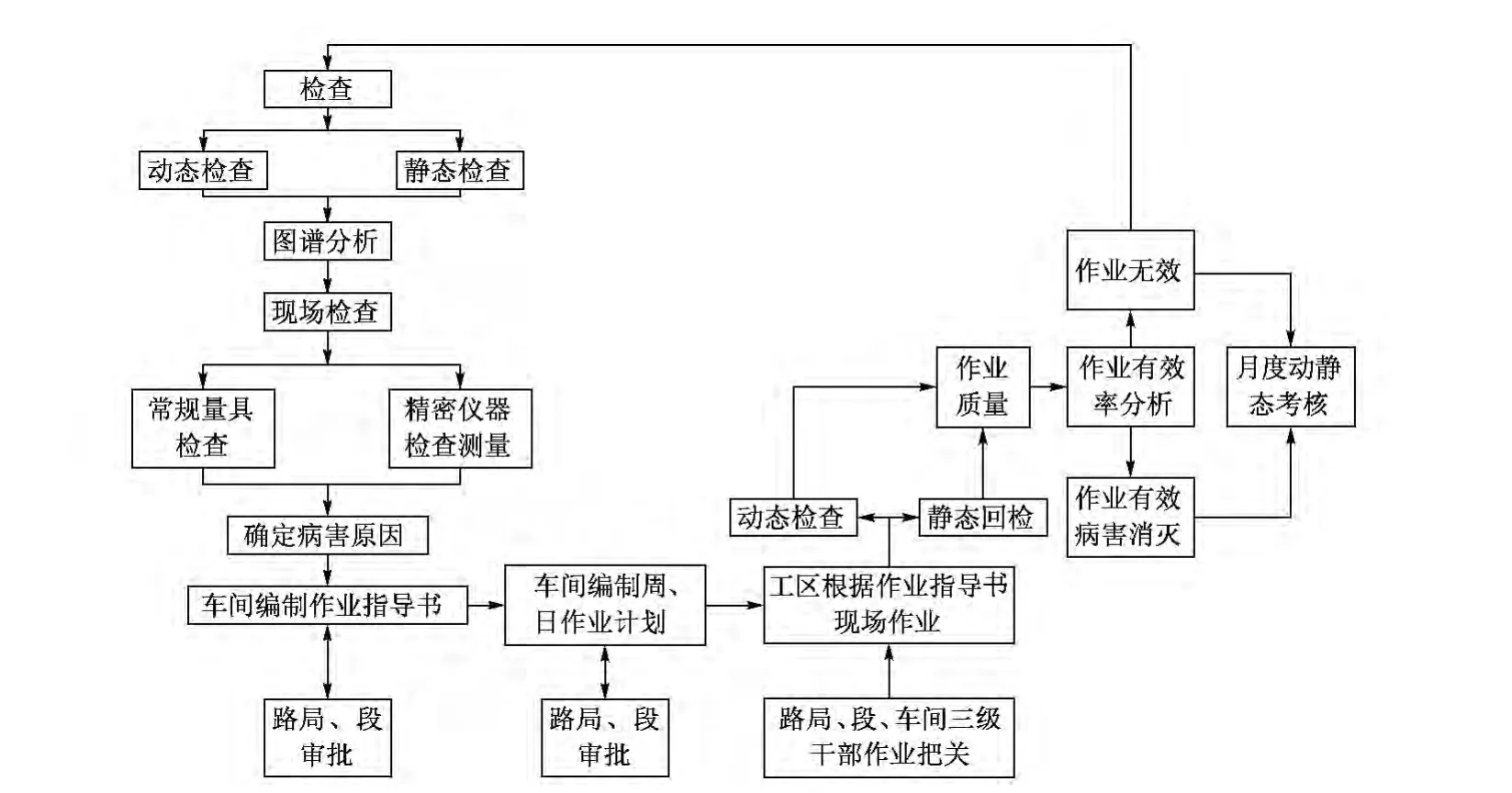
圖2 線路設備整道流程

圖3 軌道長波不平順的快速測量流程
1)作業前,輸入曲線參數并編制軌枕號列表文件。軌枕編號規則應唯一且便于現場查找,而軌枕列表應能體現道岔、隧道、橋梁上軌枕間距的不同。
2)在測量起點和終點時需打軌枕標記,在軌枕間距設計值發生變化時,須在對應位置增打軌枕標記以提高定位精度。
3)檢測速度保持在4 km/h左右,測量距離在保證覆蓋可能的病害區域的基礎上考慮搭接和動檢的里程誤差。
4)長波測量曲線時,需對直緩點、緩圓點、圓緩點、緩直點等4大樁點增打標記,以便數據分析時修正線形參數。
5)長波回程,選擇長波精測模式,掉頭勻速回拉,在測量起始點結束。
3.3 軌道長波不平順的相對測量直接調軌
長波精測數據可用于相對測量直接調軌[12],為保證整道效果,應規范內業作業流程,如圖4所示。
相對測量直接調軌內業要點:
1)數據特征辨讀應結合動、靜態波形,初步判定病害處所、類型;數據特征辨讀順序為長波→中波→短波;著重分析軌道的長波不平順、多波連續不平順以及逆向復合不平順。
2)圖上作業亦應遵循長波→中波→短波的順序;制定作業方案時應考慮天窗時間及作業能力的限制。
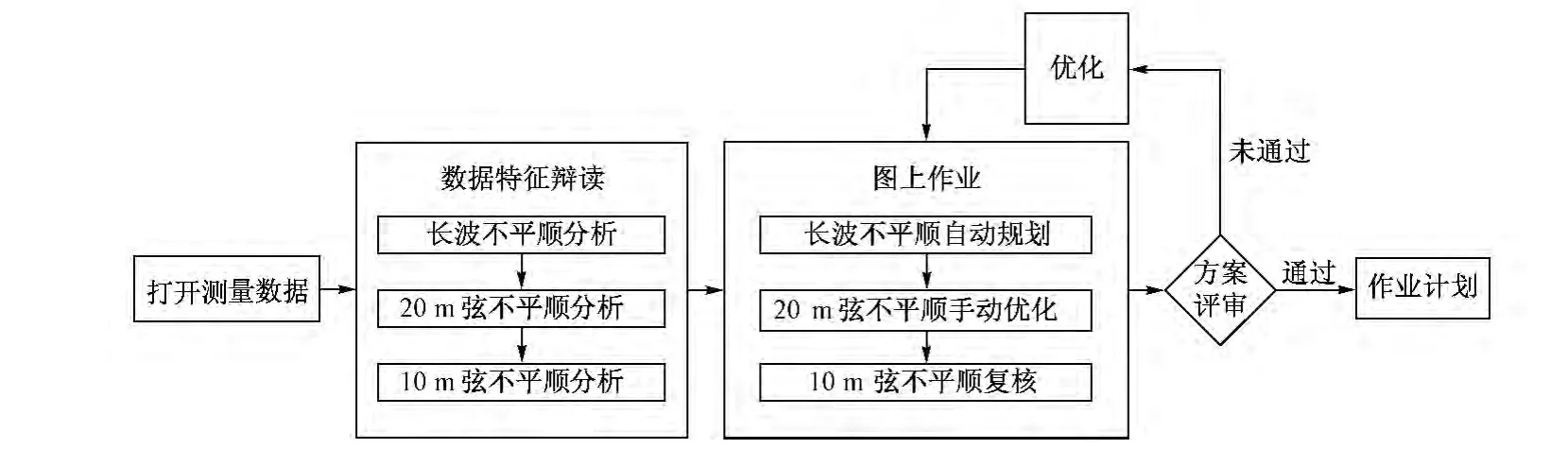
圖4 相對測量直接調軌作業流程
3)對于無砟軌道,可進行常規意義上的削峰填谷,但調整幅度受扣件系統的限制。對有砟軌道,高包無法直接通過落道削峰,只能通過抬道進行填谷并輔以順坡予以消除。
4)在無大機配合的條件下,對于長洼往往只能采用變化率控制方案,如起洼中洼。
4 長波不平順整治現場試用
為驗證0級軌檢儀指導軌道經常保養的效果,于2013年8月在某城際鐵路進行了長波不平順整道規模試用。選用GJY-T-EBJ-3型0級軌道檢查儀進行軌道精密測量,選用HSRailwayCHK XP(Ver 12.1.7)軌道幾何狀態檢查數據分析處理系統制定整道方案。
線路設計時速250 km/h,全線為有砟超長無縫線路。選取動檢不良處所27處,利用0級軌道檢查儀進行精密測量,采用相對測量直接調軌技術對其中9處制定方案并整道。現場試用顯示,其外業作業可控制在30 min內完成,而內業作業時間一般為20 min,回檢可安排在作業后立即進行;而其軌枕定位功能的應用,可有效減少病害定位等輔助作業時間,進一步提高作業效率。整道效果通過靜態回檢與動態檢查予以確認,結果顯示9處均較為明顯地削峰。其中,下行K25+200—K25+700高低70 m長波整道效果對比如圖5所示。
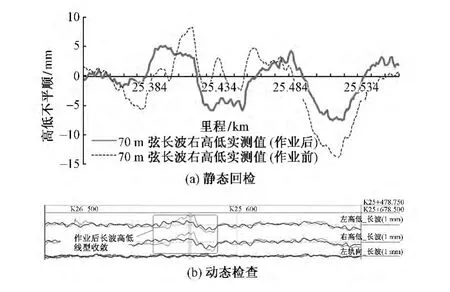
圖5 K25+200—K25+700高低70 m長波整道效果對比
由圖5可知,作業前軌檢車動檢長波高低3~-3 mm,0級軌道檢查儀靜態精密測量顯示K25+415處70 m弦長波高低最大值8.33 mm,K25+521處70 m弦長波高低最小值-13.18 mm。通過相對測量直接調軌技術制定方案并實施,回檢顯示,線路長波不平順削峰。其中K25+415處70 m弦長波高低收斂為3.11 mm,K25+512處70 m弦長波高低最小值收斂為-7.27 mm。同里程軌檢車動態檢查顯示作業后無添乘出分,起道作業前高低5 mm,作業后高低2 mm,削峰效果明顯。
5 結語
目前的長波整道是以絕對測量為基礎的,通過控制外部幾何尺寸間接控制軌道的平順性。本文從長波不平順的測量技術現狀出發,介紹了基于0級軌道檢查儀以及相對測量直接調軌,并將其應用于長波整道。結論如下:
1)借助0級軌道檢查儀的“軌枕定位+長波精測+圖上作業(圖上劃撬)”的功能組合,可以實現基于相對測量的直接調軌。在此基礎上,規范了調軌操作的工藝流程。
2)現場規模試用證明,該方法測量效率高、環境適應性好,適合于高速鐵路的經常保養。
[1]羅林,張格明,吳旺青,等.輪軌系統軌道平順狀態的控制[M].北京:中國鐵道出版社,2006.
[2]李光林,張新奎,朱利民.提速200 km/h線路長波長不平順的養護維修技術[J].鐵道建筑,2007(4):101-102.
[3]高建敏,翟婉明,王開云.高速行車條件下軌道幾何不平順敏感波長研究[J].鐵道學報,2012,34(7):83-88.
[4]盧祖文.高速鐵路軌道技術綜述[J].鐵道工程學報,2007,24(1):41-54.
[5]MIURA S,TAKAI H,UCHIDA M,et al.The mechanism of railway tracks[J].Japan Railway & Transport Review,1998(3):38-45.
[6]陳果,翟婉明,左洪福.車輛—軌道耦合系統隨機振動響應特性分析[J].交通運輸工程學報,2001,1(1):13-16.
[7]趙國堂.軌檢車技術現狀與發展[M].北京:中國鐵道出版社,2001.
[8]余祖俊.軌道交通線路幾何安全狀態動態檢測技術研究[D].北京:北京交通大學,2008.
[9]蔡軍.基于光纖陀螺儀的軌道方向不平順檢測系統的研究[D].南昌:南昌大學,2007.
[10]魏暉,吳仕鳳,朱洪濤.基于相對測量調軌的高鐵有砟線路整道技術研究[J].鐵道標準設計,2013(8):11-14.
[11]中華人民共和國鐵道部.TB/T 3147—2012 軌道檢查儀[S].北京:中國鐵道出版社,2012.
猜你喜歡
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
故事大王(2016年7期)2016-09-22 17:30:08
海峽科技與產業(2016年3期)2016-05-17 04:32:12
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21