TFT-LCD玻璃工業機器人自動包裝技術研究與應用
2014-12-24 06:52:58李博
科技視界 2014年20期
李 博
(東旭集團有限公司,河北 石家莊050021)
現在工業機器人主要用于汽車工業、機電工業、通用機械工業、建筑業、金屬加工、鑄造以及其它重型工業和輕工業部門。制造工業部門應用機器人的主要目的在于削減人員編制和提高產品質量。
液晶顯示器因為其體積小、重量輕等諸多優點占據了顯示領域的絕大部分,從電視電腦,到移動電話,液晶顯示器遍布人們生活各個角落。 液晶顯示器的大規模應用,使得市場對于液晶玻璃基板的需求劇增。國內企業抓住機遇,正在努力創造自己的光電顯示品牌,一批液晶玻璃基板生產企業涌現,市場上絕大多數液晶玻璃基板被幾大國外廠商生產壟斷的現象正逐步被打破。
本文針對國內正在運行的第五代(簡稱G5)TFT-LCD 液晶玻璃基板生產線討論工業機器人在液晶玻璃基板包裝行業中的研究與應用。
G5 代TFT-LCD 液晶玻璃基板厚度僅為0.5mm, 而尺寸達到1300mm×1100mm,重量約為2.8 公斤,每30 秒就有一片玻璃基板下線,如此薄卻尺寸大的玻璃基板在包裝過程中不能出現破碎、劃傷、吸附顆粒等現象, 而且在30 秒內需將玻璃基板碼放整齊, 誤差不超過2mm,玻璃基板之間還要鋪間隔紙用以防止玻璃相互吸附,人工是無法完成如此高精度要求的工作流程,工業機器人的引入則解決了此難題。
1 相關工藝技術
TFT-LCD 液晶玻璃基板在生產過程中的傳輸方式分為兩種。 一種是水平傳送,玻璃基板放置在水平排布的尼龍滾輪上,通過滾輪滾動將玻璃進行傳送,此傳送方式的包裝工藝也用水平操作機器人。 另一種是垂直傳送,玻璃與水平面成80°角近乎直立方式傳輸,玻璃直立放置在直線排布的尼龍槽輪上,玻璃背部采用氣浮條支撐,氣浮條表面諸多微孔中吹出一定壓力的氣體形成氣浮面保持玻璃直立且不接觸氣浮條。 此傳送方式的包裝工藝采用立式機器人。
前者成本低,但由于玻璃與滾輪直接接觸,易產生滾輪印,對玻璃基板品質產生不良影響。后者成本高,但玻璃表面不與任何物體接觸,可有效防止擦傷、劃傷等問題產生,提高良品率,垂直傳輸方式以其優點在國內被廣泛應用于G8.5 以下代次的TFT-LCD 液晶玻璃基板生產線中。
2 機器人自動包裝研究與應用
2.1 工作原理與工藝流程
G5 代TFT-LCD 液晶玻璃基板生產線已經在國內建成多條,其共同點是成品包裝區采用兩臺進口工業機器人對液晶玻璃基板進行包裝。 兩臺機器人分別為取玻璃機器人和取紙機器人,兩臺機器人型號可以相同但分工不同。
取玻璃機器人負責將生產線末端的成品玻璃基板取下碼放在A型架上。 機器人法蘭位置加裝機械支架,支架上安裝有符合潔凈等級要求的乳化橡膠吸盤, 采用吸盤吸附的方法將玻璃基板吸附牢固,然后取走碼放到A 型架上,可實現玻璃基板的安全、整齊、快速包裝。 取紙機器人負責將出紙機所提供的潔凈間隔紙取出鋪在每張成品玻璃之間,以防止玻璃基板直接相互接觸造成吸附粘連及劃傷。 取紙機器人法蘭安裝有取紙臂滑竿,滑竿上的夾爪可將間隔紙夾住取出,滑竿左右滑動可實現針對不同品質玻璃基板的間隔紙鋪放。
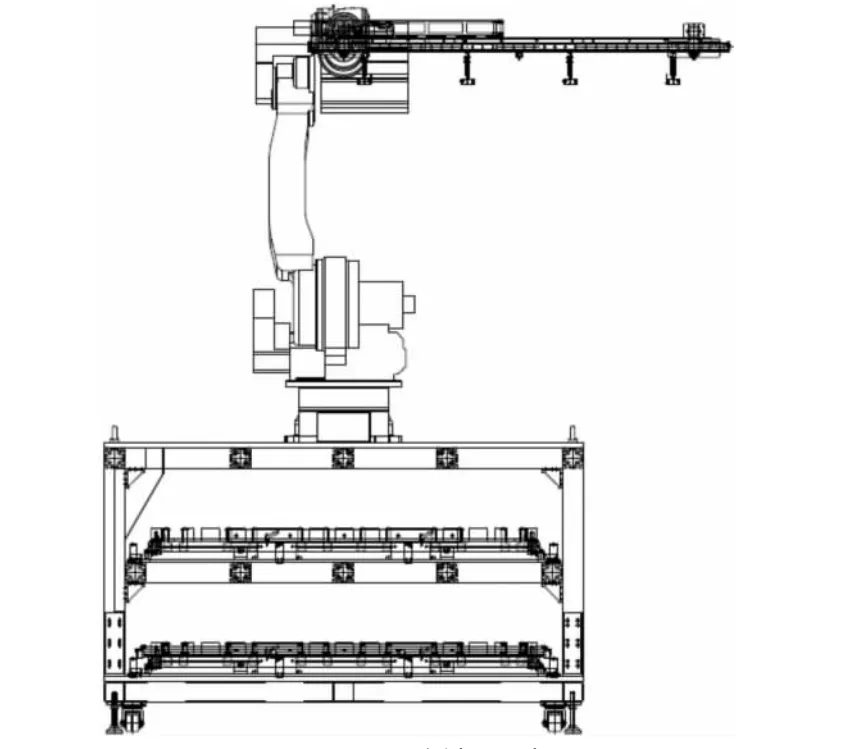
圖1 取紙機器人
成品包裝區機器人的包裝動作流程是:根據玻璃基板品質判定結果,取紙機器人先將間隔紙鋪在相應的A 型架上,取玻璃機器人再將玻璃基板放到該間隔紙上,兩臺機器人相互協調如此反復,在30 秒內將一張玻璃基板和間隔紙碼放整齊。如遇取紙機器人取到多張間隔紙時,機器人將紙張取出扔掉,然后重新取紙。兩臺機器人有各自的工作范圍,不能出現相互干涉或碰撞,因此,機器人的動作設定和工作范圍必須經過嚴格的論證。
2.2 關鍵技術與解決方案
2.2.1 機器人包裝的精確控制
垂直傳輸的G5 代TFT-LCD 液晶玻璃基板成品在A 型架上碼方時要整齊劃一,玻璃上下左右四個方向的錯位誤差不超過2mm,否則下游液晶面板企業在取用玻璃基板時將存在困難。機器人在無限重復性地碼放玻璃時要每次都要精準,這就需要使用高精度的工業機器人和高精度伺服電機,采用閉環調節,優化工藝參數。
本文所述產線采用的機器人本體為垂直多關節形,具有6 個自由度, 有效載荷達到50Kg, 工作半徑達到2m, 重復定位精度達到±0.07mm,機械振動小于4.9m/S2,電源容量為5KVA。 多關節自由度可實現復雜的動作;高定位精度可實現玻璃基板與間隔紙整齊碼放。
2.2.2 機器人自動計數
液晶玻璃基板包裝所用的A 型架一般可盛放500 張G5 代TFTLCD 液晶玻璃基板,裝滿后玻璃厚度約為350mm,機器人在放置玻璃基板時需要將A 型架上當前玻璃數量進行累加, 以使機器人每放一張玻璃基板后放置工作點后移0.7mm。 如果機器人計數錯誤,會使機器人機械手壓死在A 型架上, 不僅損壞設備還會造成A 型架上的玻璃破碎,給生產帶來巨大損失。
機器人在自動計數的同時玻璃基板傳輸設備也進行計數,每次卸載一張玻璃基板,機器人與傳輸設備之間進行計數比對,確認無誤后機器人才能將玻璃放在A 型架上。 程序計數保證計數不出錯。 另外,每個A 型架前采用激光測距傳感器進行測量, 實時監測A 型架上玻璃厚度,出現計數誤差過大時將發出警報,機器人自動停止放玻璃,避免取玻璃機器人機械手在放玻璃時與A 型架發生碰撞。

圖2 機器人具有多關節自由度
3 工業機器人應用優點與缺點
3.1 工業機器人應用優點
3.1.1 工作模式豐富。 機器人具備示教模式、再現模式、遠程模式。
3.1.2 結構模塊化,便于維護。 機器人控制柜內各個板卡采用插接形式,易于更換維護。
3.1.3 動作靈活, 精度高。 具有6 個自由度, 重復定位精度達到±0.07mm。
3.1.4 設備安全性高。機器人與周邊設備以及主電源設有多種互鎖與保護措施,提高了設備安全性。
3.1.5 通訊可靠。 機器人與外界利用專用屏蔽電纜通過CC_LINK 高速網絡進行通訊,傳輸速率最快達10Mbps,保證了信號的高速傳輸和抗干擾能力。
3.2 機器人應用缺點
3.2.1 初期投資較大。相比普通設備,工業機器人價格較高,導致初期投資較大。
3.2.2 對維護人員技術要求較高。工業機器人涉及機械、運動控制、伺服電機、電氣控制、數字通訊技術等多方面學科,維護人員需具有相關專業知識以及學歷,普通工人難以勝任。
4 結論
工業機器人雖然初期投資較高,但幾乎是一次性投入,后期僅投入有限的維護費用, 不存在人員更迭及工資水平調整等人為因素影響,從長遠來看成本并不算高。另外,通過招聘具有相關經驗人員以及進行技能培訓等方法解決維護人員專業知識欠缺等問題。文中所述機器人已經在生產線連續穩定運行多年,前述諸多優點也有所體現。 最近國內某大型代工企業生產線上也開始用工業機器人代替人工,由此可見,在生產線上使用工業機器人將是現代工業發展的趨勢,推廣機器人應用在各個行業產線將會大大提高生產效率、提高良品率、降低生產成本。 同時,也會推動我國工業整體自動化水平進一步提高。
[1]高鴻錦,蕈友梅.液晶與甲板顯示技術[M].北京郵電大學出版社,2007.
[2]范志新.液晶器件工藝基礎[M].北京郵電大學出版社,2000.
[3]梁新清.TFT-LCD 產業發展的機遇和挑戰[J].電子玻璃技術,2010(1、2).
[4]上海埃蒙特自動化系統有限公司.工業機器人在中國液晶玻璃工業的應用[Z].2012.
[5]首鋼莫托曼機器人有限公司.MOTOMAN-CR50 機器人使用說明書[Z].2010.