電磁技術的“章魚”爬壁機器人的研究
2014-12-18 08:04:30姚洪平尚曉新
制造業自動化 2014年24期
關鍵詞:系統
姚洪平,尚曉新
(1.河北聯合大學 輕工學院,唐山 063009;2.河南省開封市技師學院,開封 475000)
0 引用
機器人類別眾多,分類方式多樣,其中爬壁機器人是一種將地面機械移動機器人與吸附技術有機相結合的機器人[1]。實現對高空搶險救災作業,墻體清洗,石化管道外壁檢測等,是一種新型的機器人[2,3]。
爬壁機器人的研究主要可分為:多體柔性永磁爬壁機器人,磁隙式爬壁機器人,小型吸附式爬壁機器人機械結構及平衡性以及柔性靜電吸附技術的爬壁機器人[4~6]。柔性爬壁機器人的吸附系統的課調節性等多類問題得到了較好的解決[2]。國外,美國某大學已經成功研制出具有4個“腿輪”的爬壁機器人樣機,日本宮崎大學也研制出具有兩個旋轉葉片的“飛行機器人”等[1],該類研究對機器人的研究具有一定的積極作用,使得爬壁機器人的研究迅速成為國際熱點問題[7]。然而,爬壁機器人涉及的問題較多,學科交叉復雜,需要解決和完善的工作還很漫長。因此,本文基于爬壁機器人的發展需求,并通過章魚腕足上的吸盤有助于章魚身體的固定的類比,本文設計了“章魚”爬壁機器人。通過“章魚”爬壁機器人的研究,將對爬壁機器人的研究具有一定的參考作用。
1 設計原理及工作流程
吸附方式包括負壓吸附、磁吸附、推力吸附等,結合每類吸附方式的優缺點,本設計選擇靈活性高、可靠性強且適合本機器人運動的電磁式吸附[1,8]。電磁鐵利用電磁感應原理,通電后產生磁場,在鐵芯上產生電磁力。本文選用吸盤電磁鐵,具有結構緊湊,體積小,吸力大,全密封,環境適應性強等特點[9]。
“章魚”爬壁機器人的控制系統主要由三部分組成,分別是信息采集系統、主控系統和執行機構,其中信息采集系統主要由傳感器模塊和通訊模塊組成;主控系統由主控板(STM32單片機)組成;執行機構由驅動模塊驅動電磁鐵、關節電機與液壓系統工作,工作流程如圖1所示。因此,爬壁機器人采用吸盤電磁鐵作為機器人吸盤的動力來源,通過電磁鐵的通斷電來達到對被吸附平面吸附與否的控制,為機器人的運動規劃控制提供固定約束依據。
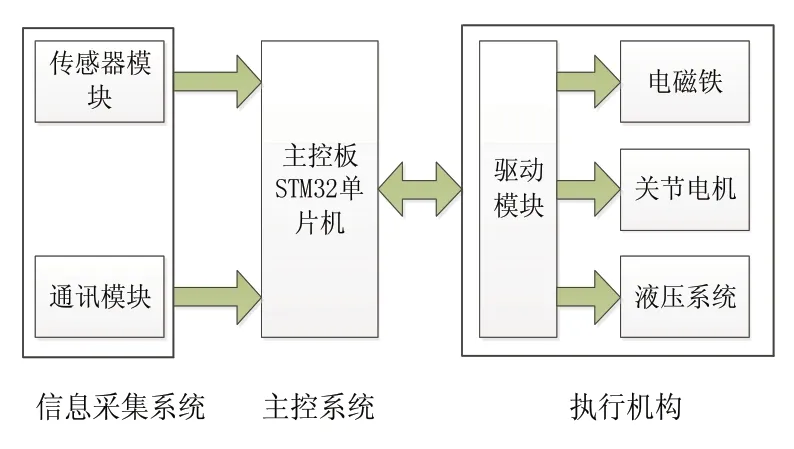
圖1 工作流程圖
2 “章魚”爬壁機器人的設計與分析
如圖2所示為“章魚”爬壁機器人的示意圖。
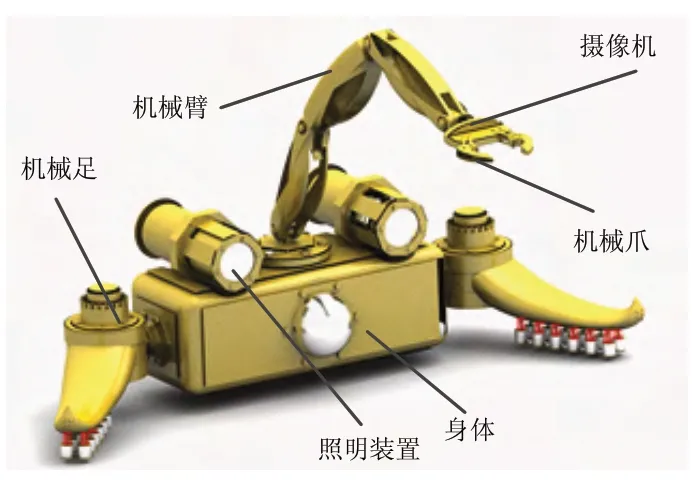
圖2 “章魚”爬壁機器人的示意圖
該機器人的機械結構主要由三部分組成:身體、左右足(包括由吸盤電磁鐵等零件構成的吸附機構)和工作機構(機械手爪、攝像機、探照燈等)。
2.1 吸附機構的設計
機器人的左右足的結構借鑒了章魚腕足的結構,整體呈流線型,能有效減小粘滯阻力,吸盤電磁鐵的靈感來源于章魚肉質吸盤,電磁鐵可在彈簧和液壓系統的控制下伸縮。
電磁鐵吸附的表面要求盡可能平整,則電磁鐵的吸力會隨著電磁鐵與被吸附平面之間氣隙的增加而顯著降低,工作穩定性降低,甚至導致整個機器人從被吸附平面滑落[10]。所以減小電磁鐵與被吸附平面之間的氣隙大小是設計的重點之一。設計中,利用了平面曲率自由伸縮的彈簧與主動伸縮的液壓桿兩大機構來減小電磁鐵與吸附平面的氣隙,從而保證吸附的穩定。如圖3所示為平面曲率自由伸縮的彈簧的示意圖。
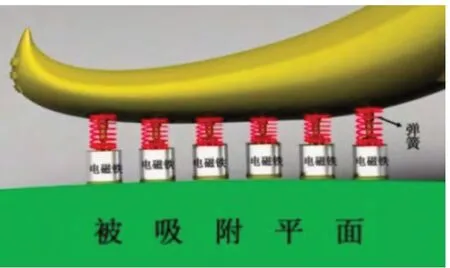
圖3 自由伸縮彈簧的示意圖
如圖3所示,平面有一定的弧度,但由于吸附機構上有兩排各六個彈簧,能夠根據平面弧度自動調節伸縮長度,并最大限度的貼合被吸附平面,以減小電磁鐵與平面之間的氣隙,從而保證機器人的穩定性。如圖4所示為主動伸縮的液壓桿,液壓桿的設計主要是彌補彈簧不能主動貼近被吸附平面的缺陷。對于彈簧不能緊密貼合的位置,可以采用液壓主動伸縮的方式,使電磁鐵與平面緊緊貼合,進而達到減小氣隙的目的。
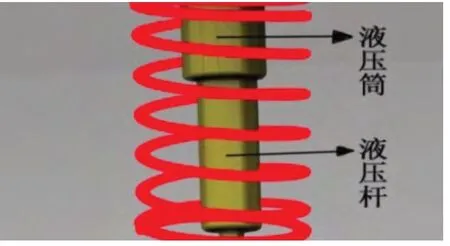
圖4 液壓桿
根據理論設計,保證足夠數量的電磁鐵吸附磁導性平面,再結合吸盤電磁鐵吸力大的特點,能夠滿足機器人吸附穩定性的要求。
2.2 爬壁機器人分析
通過機械結構設計及理論分析,電磁鐵通電后能產生足夠的磁力吸住被吸附平面,使機器人的左足或者右足固定在被吸附平面上。機器人工作時,通電固定的吸附機構是受力矩最大的部位,同時由于尺寸較小,是應力最大的部位。因此,很有必要對吸附機構進行有限元分析,以確定機器人關鍵部位各零件的尺寸和材料。論文假設在液壓筒的一端施以大小為50N的力,同時將電磁鐵的一端端面固定,如圖5所示。

圖5 吸附機構受力圖
在確定了約束等條件后,利用Inventor的有限元分析功能得到吸附機構的Mises等效應力圖如圖6所示。
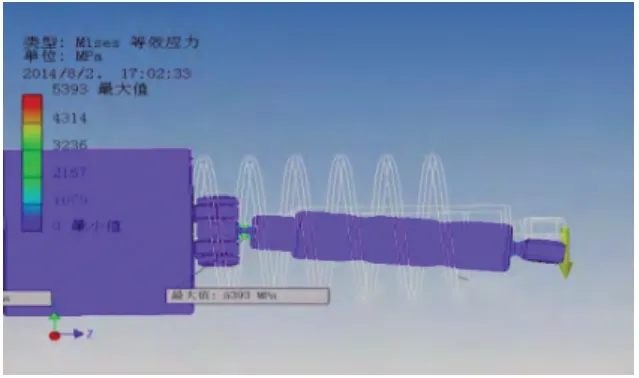
圖6 Mises等效應力圖
為了增加應力分析的準確性和更加全面的了解機構在受力情形下的位移情況,同時得出機構的第一個主應力圖、第三個主應力圖、位移圖、安全系數圖分別如圖7~圖10所示。
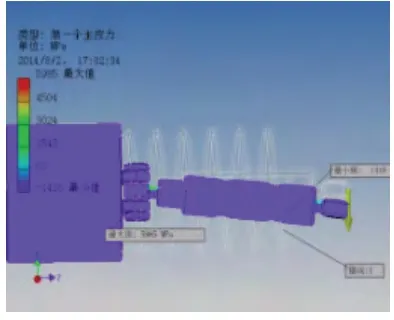
圖7 第一個主應力圖
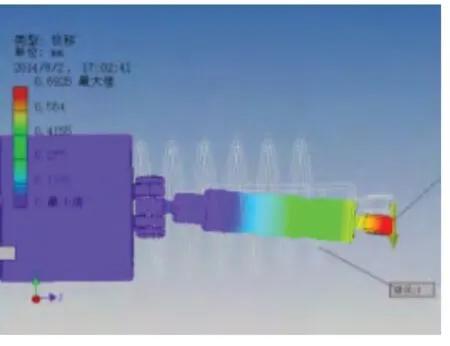
圖9 位移圖
從有限元的分析中我們看到吸附機構在液壓桿的過渡處應力最大,安全系數也最低,最容易發生強度破壞。因此,對于液壓桿在過渡處直徑的大小設計和材料選擇就比較重要,其機械結構材料選擇牌號為Q345E的低合金高強度結構鋼,并能夠滿足液壓桿的強度需要,但同時應該適當增大液壓桿過渡處的直徑大小。
3 機器人的控制系統
爬壁機器人的控制系統主要由信息采集系統,主控系統以及執行機構系統三部分組成,如圖1所示。
3.1 信息采集系統
信息采集系統是爬壁機器人收集信息的主要途徑,機器人配有攝像頭傳感器,而其他的傳感器可以根據實際應用需要增加,例如需要在深海探測時可加上聲納傳感器等。
該機器人的通訊模塊采用短距離、低功耗的無線通信技術(Zigbee)。廣泛應用于自動控制和遠程控制領域,可以嵌入各種設備。該機器人的Zigbee模塊如圖11所示。
圖11 Zigbee通訊模塊
3.2 主控系統
該機器人的主控系統采用STM32系列單片機。STM32系列單片機具有低成本、低能耗和高性能等優點[10,11]。其中CAN總線易于增加節點,從而使得增加傳感器相對簡單,對于改進機器人的工作機構非常有利。而STM32單片機多達一百個引腳和高速度的處理能力足以控制整個機器人的運動與工作。
3.3 執行機構
如圖12所示為吸盤電磁鐵驅動模塊電路,由于電磁鐵只有開和關,兩種狀態,所以使用三極管組成電子開關作為電磁鐵的驅動模塊。
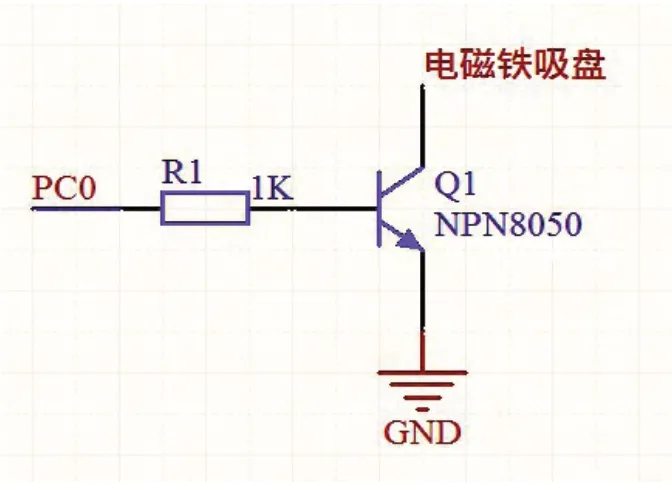
圖12 電磁鐵吸盤驅動電路
電機驅動模塊根據機器人對運動定位的精度要求,因此,圖13所示的電機驅動方式,此驅動方式與STM32主控機能很好地兼容,可以控制速度、方向并且體積小,重量輕。圖13為兩肩部電機的驅動電路。
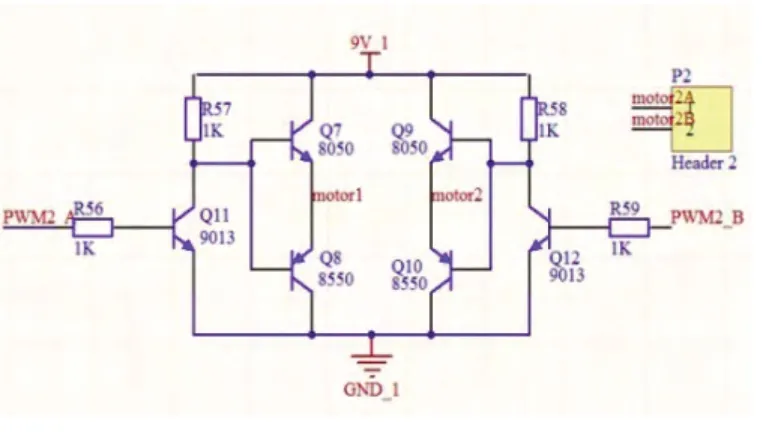
圖13 電機驅動電路
4 結論
論文借鑒章魚腕足的結構設計了仿生爬壁機器人,對其機械機構進行了概述。同時對爬壁機械足的結構進行了有限元分析,該分析結果有助于爬壁機器人的結構設計與材料的選擇。
同時對機器人的控制部分的組成進行了分析,其結果能夠有效的滿足機器人的運動。該爬壁機器人的設計為爬壁機器人的研究提供了參考作用。
[1]付宜利,李志海.爬壁機器人的研究進展[J].機械設計,2008,25(4):1-4.
[2]桂仲成,陳強,孫振國.多體柔性永磁爬壁機器人[J].機械工程學報,2008,44(6):177-182.
[3]Santos,D.;Heyneman,B.;SangbaeKim;Esparza,N.;Cutkosky,M.R.;“Geckoinspiredclimbing behaviors on vertical and overhanging surfaces”,2008.ICRA,2008:1125-1131.
[4]黃之峰,王鵬飛,李滿天,等.基于柔性靜電吸附技術的爬壁機器人研究[J].機械設計與制造,2011,6(6):166-168.
[5]Yamamoto,A.;Nakashima,T.;Higuchi,T.;“Wall Climbing Mechanisms sing Electrostatic Attraction Generated by Flexible Electrodes”,Micro Nano Mechatronics and Human Science,2007:389-394.
[6]薛勝雄,任啟樂,陳正文,等.磁隙式爬壁機器人的研制[J].機械工程學報,2011,47(21):37-42.
[7]劉明芹,戴永雄,黃文攀,等.小型吸附式爬壁機器人機械結構及平衡性[J].機械設計與制造,2011,5(5):146-148.
[8]崔旭明,孫英飛,何富君.壁面爬行機器人研究與發展[J].科學技術與工程,2010,10(11):2672-2676.
[9]張培鋒,王洪光,房立金,等.一種新型爬壁機器人機構及運動學研究[J].機器人,2007,29(1):12-17.
[10]武麗君,吳善強.間隙式單吸盤爬壁機器人動力特性分析[J].科學技術與工程,2012,12(31):8271-8274.
[11]張國平,楊杰,高婧宇.爬壁機器人真空吸附及運動方式探討[J].液壓氣動與密封,2007,1(1):11-13.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
