月面巡視探測器導航和全景相機標定方法研究
2014-12-12 01:46:56申振榮魏士儼劉少創
測繪通報 2014年1期
張 爍,申振榮,魏士儼,劉少創
(1.武漢大學測繪學院,湖北武漢430079;2.北京空間飛行器總體設計部,北京100094;3.中國科學院遙感與數字地球研究所,北京100101)
一、引 言
月面巡視探測器的立體視覺系統由6臺相機構成。其中,包括一對導航相機、一對全景相機和一對避障相機,每對相機都是由設計參數相同的兩臺組成。對于月面巡視探測器來說,立體視覺系統的高精度標定與以下問題密切相關:①著陸器及月面巡視探測器的高精度定位與導航;②月面巡視探測器的高精度全局路徑規劃與生成機械臂運動策略;③著陸區及巡視探測區域的精細制圖,提取高分辨率的DEM并生成正射影像。
為了滿足深空巡視探測器立體視覺系統的高精度標定,國內外學者開展了一些研究,如Yakimovsky和Cunningham研究了CAHV和CAHVOR模型,并成功應用于美國“勇氣號”與“機遇號”火星探測車的導航相機和全景相機標定;J.F.BellⅢ等提出了一種火星探測車的在軌實時標定算法;Donald B.Gennery針對美國火星探測計劃提出了立體視覺系統的廣義標定模型;在國內,王保豐等提出了月面巡視探測器避障相機的“兩步法”標定算法[1-5]。
本文推導了一種基于自檢校光束法平差模型的月面巡視探測器導航相機和全景相機的高精度標定算法。該方法采用附加畸變參數的針孔成像模型作為導航相機和全景相機的投影模型。首先,使用高精度平面格網作為標定物,在對平面格網進行旋轉多角度拍攝后,采用模板匹配法高精度地提取格網點的像點坐標;此后,將格網點的像點坐標和空間坐標代入二維直接線性變換算子解算相機的內方位元素和像片的外方位元素初值,最后,將內、外方位元素初值、格網點的像點坐標和空間坐標代入嚴密的自檢校光束法平差模型,對標定參數進行高精度迭代求解,當觀測值的方差估值和未知數的改正值收斂于給定閾值后,解算出標定參數的精確值。
二、二維直接線性變換模型
月面巡視探測器導航和全景相機的標定參數包括相機的主點位置(x0,y0)、主距(fx,fy)、徑向畸變(K1,K2)、切向畸變(P1,P2)、左相機相對于右相機的方位關系(ΔXs,ΔYs,ΔZs,Δφ,Δω,Δκ)。
利用二維直接線性變換算法可以解算出相機的內方位元素和像片的外方位元素初始值。二維直接線性變換模型可以表示為
式中,H=(h1,h2,h3,h4,h5,h6,h7,h8)T為二維直接線性變換的8個變換參數;X、Y為平面格網點的空間坐標(Z坐標為零);x、y為平面格網點的像點坐標。當每張像片中的格網點數大于4時,可以對式(1)進行線性變換解出8個變換參數的初始值;將式(1)進行泰勒級數展開,利用最小二乘方法迭代求解8個變換參數的精確值。
利用式(1)及攝影測量中的共線方程,可以推導出
利用兩張以上像片,將式(2)表示為LX=c的形式,通過解超定方程可以求得主距(fx,fy)和主點(x0,y0)的初始值。在解算過程中,要避免臨界運動序列問題,即—相機固定而標定板只繞Z軸旋轉,這時會造成8個參數之間線性相關。
在Y為主軸的轉角系統下

通過式(4)求解像片外方位角元素,求解ω時,b3在開平方后首先取正號,將已確定的κ角與通過b3求得的 b1、b2算出的 κ'相比較,若 κ≠κ',則 b3取負號,然后重新計算b1、b2的值。
在解算出(φ,ω,κ)之后,需要重新計算旋轉矩陣,像片外方位線元素(XS,YS,ZS)的初始值解算公式如下
三、自檢校光束法平差模型
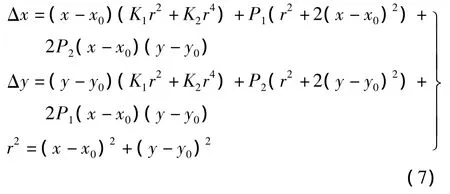
利用嚴密的自檢校光束法平差模型對標定參數的初始值進行迭代求解才能獲得可靠且高精度的標定結果。引入徑向畸變和切向畸變參數之后的共線方式如下[6]
式中,畸變模型表示為
對式(6)進行泰勒級數展開,并將內方位元素、平面格網點空間坐標和畸變參數處理成虛擬帶權觀測值,則觀測值的誤差方程式表示為
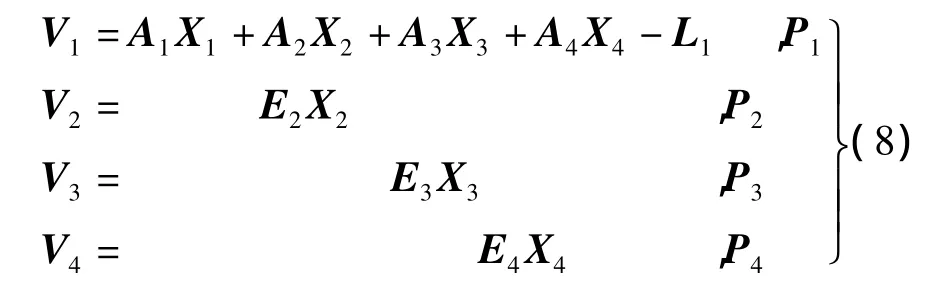
式中,X1為外方位元素的改正數向量,A1為相應系數矩陣;X2為格網點空間坐標改正數向量,A2為相應系數矩陣;X3為內方位元素改正數向量,A3為相應系數矩陣;X4為畸變參數改正數向量,A4為相應矩陣;L1為像點坐標的觀測值向量;E2、E3、E4為單位矩陣;P1、P2、P3,P4為對應觀測值的權矩陣。
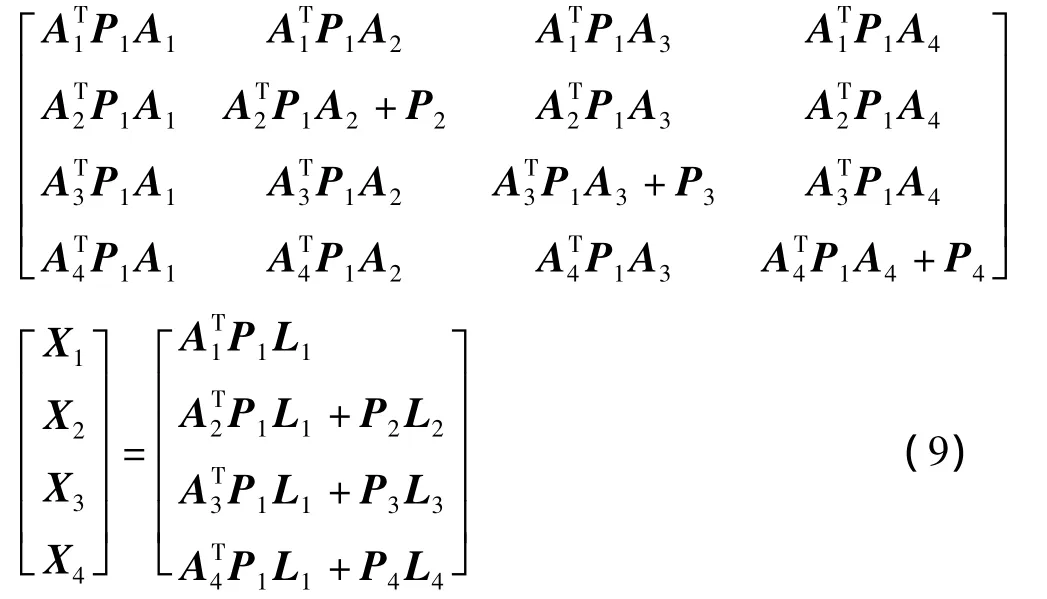
式(8)是典型的間接平差公式,誤差方程式中各展開項的系數可見參考文獻[7],其對應的法方程式可表示為[8]
對于自檢校光束法平差模型,各觀測值權的大小決定了待解算參數的精度和未知數的收斂程度,因此要對各觀測值賦以合適的權值[9-10]。本文采用驗后方差估計的方法對觀測值賦權,觀測值的權矩陣可用以下公式計算
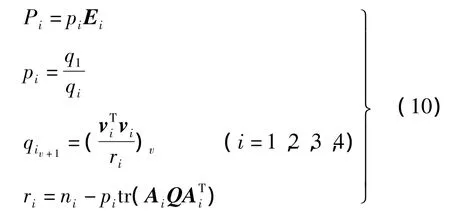
式中,qi為第i組觀測值的方差估值;vi為第i組觀測值的改正數向量;ri為第i組觀測值的多余觀測分量;v為迭代次數;Ai為第i組觀測值在誤差方程式系數陣中之相應子矩陣;ni為第i組觀測值個數;Q=(ATPA)-1,為未知數的協因素陣。
通常均假設p1=1,迭代計算的收斂標準可用表述,ε1為極小值。
四、算法試驗與分析
對于上文提出的月面巡視探測器導航和全景相機標定算法,采用一組實際數據進行試驗。平面標定格網大小為400 mm×300 mm,共88個設計格網點,格網間距30 mm,格網點精度0.2 mm。試驗采用的CCD相機的視場角為15°×15°,將兩臺CCD相機固定在約270 mm的基線上,構成月面巡視探測器立體視覺系統,如圖1所示。
拍攝標定影像時,控制立體視覺系統的兩臺相機在標定格網前方0.7 m處的9個位置同時進行拍攝,左右兩臺相機在每個攝站都拍攝0°和90°兩張影像,共獲取36張標定試驗影像。

圖1 月面巡視探測器立體視覺系統示意圖
采用基于模板匹配的算法對格網點的像點坐標進行精確提取,像點坐標提取精度達到0.1像素,匹配格網點如圖2所示。利用嚴密的自檢校光束法平差模型將格網點的設計坐標作為未知數,并賦予適當的權值進行平差,以精確求解出左右兩臺相機的標定參數及格網點空間坐標,標定的統計結果見表1;左相機相對于右相機的方位關系見表2。
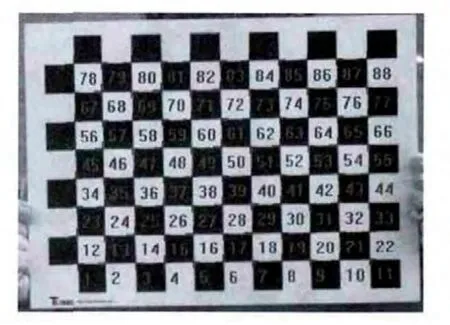
圖2 匹配格網點示意圖

表1 立體視覺系統標定統計結果 像素

表2 左相機相對于右相機的方位關系
為了評價本文提出的月面巡視探測器立體視覺系統標定算法的精度,統計了平差結果中各項參數的中誤差,見表1。
利用自檢校光束法平差進行月面巡視探測器立體視覺系統標定的單位權中誤差在0.2個像素左右。將標定參數、像片的外方位元素及平差后的格網點空間坐標帶入式(6),計算出格網點的像點坐標與模板匹配方法獲取的格網點像點坐標差值的中誤差。月面巡視探測器立體視覺系統左、右相機拍攝的每張像片中像點坐標的匹配值和投影值差值的中誤差在1個像素左右。因此,利用本方法可以對月面巡視探測器的導航和全景相機進行高精度的標定。
五、結束語
本文詳細推導了一種適用于月面巡視探測器導航相機和全景相機的高精度標定算法。采用一對工業鏡頭模擬了月面巡視探測器全景相機和導航相機,并利用一組實際數據對算法進行試驗驗證,試驗證明本算法具有較高的精度和靈活性,可以滿足月面巡視探測器導航相機和全景相機高精度標定的要求。
在利用法方程式(BTPB)X=BTPL求解未知數的改正數X時,由于方程式的系數矩陣過大(通常為上千階的方陣),導致求解效率低下,因此需要對法方程的系數矩陣進行優化處理,以提高求解速度,這將在后續研究中予以關注。
[1]GENNERY D B.Generalized Camera Calibration Including Fish-eye Lenses[J].International Journal of Computer Vision,2006,68(3):239-266.
[2]MAKI J N,BELL J F,HERKENHOFF K E,et al.Mars Exploration Rover Engineering Cameras[J].Journal of Geophysical Research,2003,108(E12):8071.
[3]YAKIMOVSKY Y,CUNNINGHAM R.A System for Extracting Three-dimensional Measurements from a Stereo Pair of TV Cameras[J].Computer Graphics and Image Processing,1978,7(2):195-210.
[4]BELL J F,SQUYRESS W,HERKENHOFF K E,et al.Mars Exploration Rover Athena Panoramic Camera(Pancam)Investigation[J].Journal of Geophysical Research,2003.108(E12):8063.
[5]王保豐,毛曉艷,唐歌實.月球車魚眼相機的標定方法研究 [J].宇航學報,2011,32(4):934-939.
[6]劉少創,賈陽,陳建新.月面巡視探測器立體相機共線方程的建立[J].航天器工程,2007,16(3):17-20.
[7]張永軍,張祖勛,張劍清.利用二維DLT及光束法平差進行數字攝像機標定[J].武漢大學學報:信息科學版,2002,27(6):567-571.
[8]詹總謙,張祖勛,張劍清.基于稀疏矩陣技術的光束法平差快速算法設計[J].測繪通報,2006(12):5-8.
[9]李德仁.自檢校光束法區域網平差中的驗后權估計[J].武漢大學學報:信息科學版,1982,7(1):16-24.
[10]李德仁,FORSTNER W.附加參數的可靠性研究[J].測繪學報,1987,16(2):103-111.
