有色噪聲對(duì)動(dòng)態(tài)尋北的影響
2014-12-12 01:46:52蔣慶仙白云超王成賓
測(cè)繪通報(bào) 2014年1期
蔣慶仙,白云超,王成賓
(西安測(cè)繪研究所,陜西西安710054)
一、引 言
陀螺尋北儀是一種采用陀螺儀作為角速率傳感器快速精確測(cè)定真北方位的儀器。隨著慣性技術(shù)、電子技術(shù)和計(jì)算機(jī)等技術(shù)的進(jìn)步,陀螺尋北儀在車輛導(dǎo)航定位、海洋勘探、石油鉆井、隧道開(kāi)鑿等領(lǐng)域均得到了日漸廣泛的應(yīng)用。根據(jù)采樣和解算方式的不同,陀螺尋北儀有多種尋北方法。近年來(lái)興起了動(dòng)態(tài)旋轉(zhuǎn)調(diào)制尋北法,在尋北過(guò)程中,慣性測(cè)量單元IMU(由陀螺儀和加速度計(jì)組成)繞其垂直中心軸連續(xù)轉(zhuǎn)動(dòng),通過(guò)采樣陀螺的輸出信號(hào)解算出陀螺敏感軸的初始方位角[1-5]。其優(yōu)點(diǎn)是通過(guò)連續(xù)轉(zhuǎn)動(dòng)使陀螺的常值漂移、隨機(jī)漂移受到周期性調(diào)制,通過(guò)積分得到消除,因而可顯著提高尋北精度。
在動(dòng)態(tài)定位測(cè)量中,觀測(cè)誤差往往不屬于高斯白噪聲,而是具有一定時(shí)空相關(guān)性的有色噪聲。有色噪聲可看作是某一線性系統(tǒng)在白噪聲驅(qū)動(dòng)下的響應(yīng),它的存在嚴(yán)重影響著動(dòng)態(tài)濾波的精度和可靠性,有必要在數(shù)據(jù)處理中加入有色噪聲的檢驗(yàn)和建模,以消除或減弱有色噪聲對(duì)參數(shù)估計(jì)的影響。現(xiàn)已形成了多種減弱和消除有色噪聲影響的方法,如附加有色參數(shù)濾波法、相鄰觀測(cè)值組差法、基于濾波殘差建模法、自適應(yīng)濾波和自適應(yīng)抗差濾波[6-8]。在數(shù)據(jù)處理中常利用白噪聲的定義與統(tǒng)計(jì)特性判斷觀測(cè)噪聲是屬于白噪聲還是有色噪聲。目前對(duì)有色噪聲建模比較麻煩,常用的建模方法一般分為相關(guān)函數(shù)法和時(shí)間序列分析法,如AR模型、指數(shù)相關(guān)函數(shù)和高斯相關(guān)函數(shù)[9-10]。通過(guò)對(duì)有色噪聲建模、擬合、預(yù)報(bào),以及對(duì)觀測(cè)值進(jìn)行誤差修正,使觀測(cè)值中僅留下白噪聲或近似于白噪聲,從而減弱有色噪聲對(duì)參數(shù)估計(jì)的影響。
為了分析有色噪聲對(duì)動(dòng)態(tài)尋北中方位角估值的影響,本文在一階自回歸AR模型的假設(shè)下推導(dǎo)了有色噪聲對(duì)參數(shù)最小二乘估值的影響函數(shù),分析了其影響性質(zhì)。利用觀測(cè)殘差建立了有色噪聲的一階AR模型,并對(duì)有色噪聲進(jìn)行了擬合和預(yù)報(bào)[11]。為了削弱陀螺信號(hào)中異常噪聲對(duì)尋北精度的影響,對(duì)陀螺信號(hào)進(jìn)行了抗差估計(jì)以控制粗差的影響。計(jì)算結(jié)果表明,當(dāng)陀螺信號(hào)中包含有色噪聲時(shí),采用一階AR模型對(duì)有色噪聲進(jìn)行擬合和預(yù)報(bào),能夠有效削弱有色噪聲的影響。采用一次啟動(dòng)漂移穩(wěn)定性為0.03°/h的動(dòng)調(diào)陀螺,在4 min之內(nèi)系統(tǒng)尋北精度小于0.6',遠(yuǎn)高于不考慮有色噪聲影響得到的精度,極大地提高了系統(tǒng)的性能。
二、有色噪聲對(duì)參數(shù)最小二乘估值的影響
設(shè)有觀測(cè)序列 L1,L2,…,Ln,觀測(cè)方程為

式中,X為參數(shù)向量;A為設(shè)計(jì)矩陣;e為真誤差向量,其協(xié)方差矩陣為Σk。
當(dāng)e為高斯白噪聲序列時(shí),參數(shù)的最小二乘(LS)解為[12]

當(dāng)e為有色噪聲時(shí),采用時(shí)間序列分析法描述有色噪聲,即把平穩(wěn)的有色噪聲看做是由各時(shí)刻相關(guān)序列和各時(shí)刻出現(xiàn)的白噪聲所組成。將tk時(shí)刻的有色噪聲ek表示為[13]

式中,ρi<1(i=1,2,…,p)為自回歸參數(shù);θi<1(i=1,2,…,q)為滑動(dòng)平均參數(shù);ak為白噪聲,服從分布N(0,)。
式(3)稱為自回歸滑動(dòng)平均ARMA(p,q)模型。模型前半部分稱為自回歸模型AR(p),后半部分稱為滑動(dòng)平均模型MA(q)。
設(shè)有色噪聲模型為一階AR模型,k時(shí)刻的觀測(cè)誤差向量表示為

式中,ek-1為 k-1 歷元的觀測(cè)誤差;ρk,k-1為相關(guān)系數(shù)矩陣;ak為高斯白噪聲。將Lk修正為

則近似有

式中,L'k為經(jīng)過(guò)有色噪聲改正后的觀測(cè)值。顧及式(2)可得參數(shù)最小二乘解為[9,11]

因而,有色觀測(cè)噪聲對(duì)參數(shù)解向量的影響函數(shù)(influence function,IF)為

由式(8)可見(jiàn),純有色噪聲對(duì)參數(shù)最小二乘估計(jì)解的影響主要與觀測(cè)誤差、相關(guān)系數(shù)及設(shè)計(jì)矩陣有關(guān)。當(dāng)加大觀測(cè)的采樣間隔時(shí),其相關(guān)系數(shù)ρk,k-1必然減小,前面歷元的觀測(cè)誤差對(duì)本歷元參數(shù)估計(jì)的附加影響就小。當(dāng)前一歷元的觀測(cè)精度很高,即ek-1很小時(shí),有色噪聲對(duì)參數(shù)估計(jì)的影響也將減小。
三、有色噪聲的擬合與預(yù)報(bào)
1.有色噪聲的擬合
當(dāng)觀測(cè)值中存在有色噪聲時(shí),利用觀測(cè)殘差在一階自回歸模型的基礎(chǔ)上建立有色噪聲模型。將k時(shí)刻的觀測(cè)殘差表示為

對(duì)于觀測(cè)殘差序列,有誤差方程

當(dāng)誤差Δk服從正態(tài)分布時(shí),有色噪聲模型參數(shù)的最小二乘估值為


2.有色噪聲的預(yù)報(bào)


有色噪聲改進(jìn)后,重寫(xiě)誤差方程如下



式(16)的解算一般采用迭代法,第k+1步的迭代解為

四、計(jì)算與分析
試驗(yàn)數(shù)據(jù)來(lái)自動(dòng)調(diào)陀螺尋北儀,進(jìn)行了7個(gè)測(cè)回的尋北試驗(yàn)。動(dòng)調(diào)陀螺的一次啟動(dòng)漂移穩(wěn)定性為0.03°/h。轉(zhuǎn)臺(tái)的轉(zhuǎn)速設(shè)定為5 r/min,分別采集陀螺儀x、y軸的輸出信號(hào),采樣率為25 kHz。采用高精度的鎖相穩(wěn)速控制電路使轉(zhuǎn)臺(tái)速率的相對(duì)穩(wěn)定度達(dá)到10-4,DSP+FPGA構(gòu)成了數(shù)據(jù)的高速采集與解算單元。
采用第1個(gè)測(cè)回的數(shù)據(jù)計(jì)算狀態(tài)參數(shù)的初值,
在基于觀測(cè)殘差序列使用式(11)或式(13)獲得AR模型的參數(shù)后,有色噪聲的預(yù)報(bào)值可表達(dá)為[11]采用第2—7個(gè)測(cè)回的數(shù)據(jù)計(jì)算參數(shù)的估值并評(píng)定尋北精度。對(duì)測(cè)試數(shù)據(jù)采用以下5個(gè)方案處理,測(cè)值的權(quán)反映了每個(gè)測(cè)回的估值對(duì)本方案中方位角估值的貢獻(xiàn)。抗差估計(jì)中迭代收斂的條件為,等價(jià)權(quán)函數(shù)的臨界值c0、c1分別取為1.5和5。由于還沒(méi)有得到方位角的實(shí)際值,計(jì)算中采用觀測(cè)值的中誤差考核尋北精度。表1給出各個(gè)方案中方位角的計(jì)算結(jié)果。
方案1:不考慮有色噪聲影響的最小二乘估計(jì);方案2:不考慮有色噪聲影響的抗差估計(jì);
方案3:對(duì)有色噪聲進(jìn)行最小二乘擬合的最小二乘估計(jì);
方案4:對(duì)有色噪聲進(jìn)行最小二乘擬合的抗差估計(jì)。
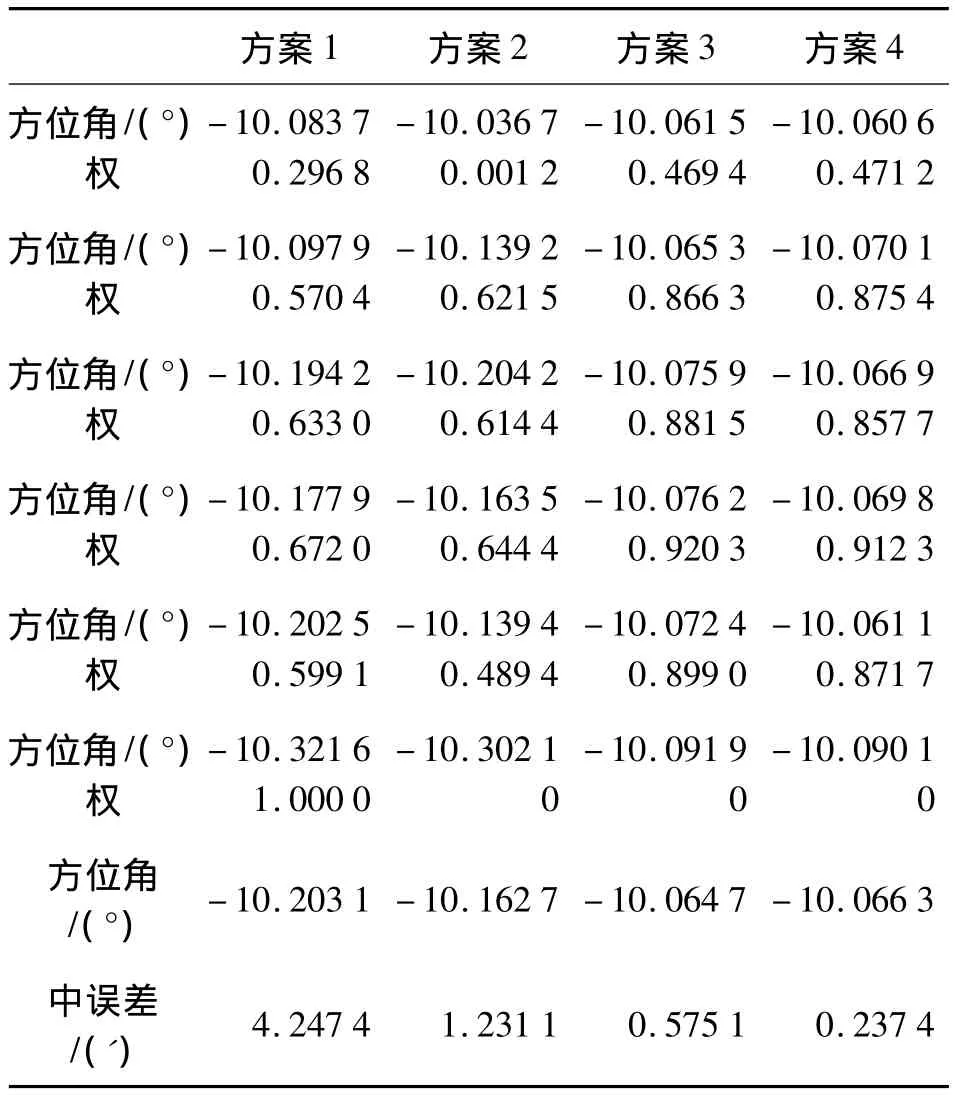
表1 尋北結(jié)果
為了直觀顯示有色噪聲擬合的效果,由圖1、圖2分別給出觀測(cè)值的原始?xì)埐詈陀猩肼晹M合后的觀測(cè)殘差。由此可以看出原始?xì)埐畹姆禐?.2°/h,而經(jīng)過(guò)有色噪聲擬合后的觀測(cè)殘差為0.1°/h。
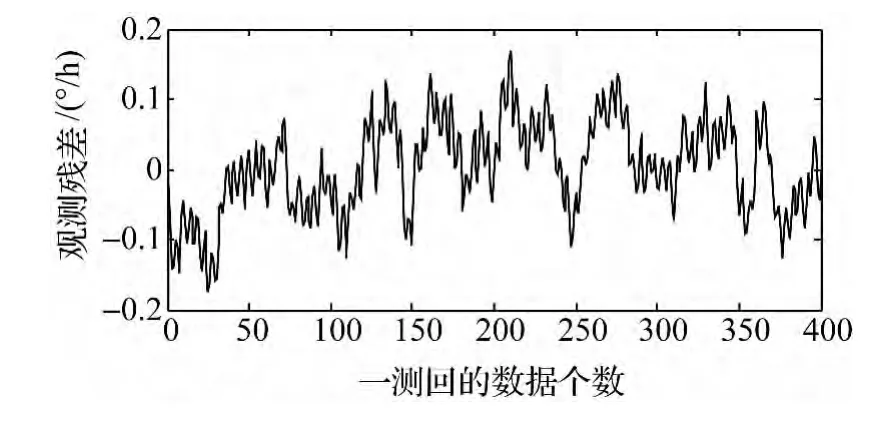
圖1 原始?xì)埐?/p>
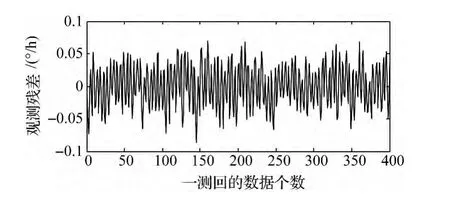
圖2 有色噪聲擬合后的殘差
五、結(jié) 論
分析上述結(jié)果,可得如下結(jié)論:
1)陀螺儀信號(hào)中包含有色噪聲時(shí),動(dòng)態(tài)尋北的精度和可靠性將受到嚴(yán)重的影響(見(jiàn)方案1的尋北結(jié)果)。
2)抗差估計(jì)能夠削弱信號(hào)中存在的異常干擾的影響,并且可以將異常干擾剔除而不影響其余有用信號(hào)。算例中第6測(cè)回計(jì)算得到的方位角偏離了方位角的最終估值,但采用抗差估計(jì)時(shí)給予其零權(quán)處理,從而減弱了載體擾動(dòng)對(duì)方位角估值的影響。
3)采用一階自回歸模型對(duì)有色噪聲進(jìn)行擬合和預(yù)報(bào),能夠有效削弱有色噪聲的影響,極大地提高了系統(tǒng)的尋北精度(見(jiàn)方案3、方案4的尋北結(jié)果)。
4)最小二乘估計(jì)不具有抗差性,其控制粗差影響的能力要低于抗差估計(jì)。在采用最小二乘估計(jì)對(duì)有色噪聲進(jìn)行擬合和預(yù)報(bào)后,再進(jìn)行抗差估計(jì),獲得了明顯優(yōu)于最小二乘估計(jì)的結(jié)果。
綜上所述,有色噪聲對(duì)參數(shù)估計(jì)的影響不容忽視,在動(dòng)態(tài)尋北測(cè)量數(shù)據(jù)處理中,應(yīng)充分考慮有色觀測(cè)噪聲的影響。當(dāng)陀螺儀信號(hào)中包含有色噪聲和異常干擾時(shí),采用最小二乘估計(jì)對(duì)有色噪聲進(jìn)行擬合和預(yù)報(bào),在此基礎(chǔ)上進(jìn)行抗差估計(jì)能夠有效控制載體擾動(dòng)和有色噪聲兩者的共同影響。
[1]KIM S J,LEE S S,KWON Y S.Dynamic North-finding Scheme Based on a Fiber Optic Gyroscope[C]∥Proceeding of SPIE.Orlando:SPIE,1997:126-136.
[2]KIM I S.KIM Y,Matisov A,et al.Dynamic Scheme North Finder Using a Fiber Optic Gyroscope[C]∥Proceeding of SPIE.Beijing:SPIE,1996:228-236.
[3]鄒向陽(yáng),孫謙,陳家斌,等.連續(xù)旋轉(zhuǎn)式尋北儀的尋北算法及信號(hào)處理[J].北京理工大學(xué)學(xué)報(bào),2004,24(9):804-807.
[4]徐建華,謝玲,高亞楠,等.旋轉(zhuǎn)調(diào)制式尋北儀濾波技術(shù)研究[J].北京理工大學(xué)學(xué)報(bào),2005,25(8):718-721.
[5]張思將,秦石喬,王省書(shū),等.連續(xù)旋轉(zhuǎn)式激光陀螺尋北儀研究[J].航空兵器,2006(1):12-15.
[6]趙長(zhǎng)勝.有色噪聲濾波理論與算法[M].北京:測(cè)繪出版社,2011.
[7]崔先強(qiáng).動(dòng)態(tài)導(dǎo)航有色噪聲的影響與控制[D].鄭州:信息工程大學(xué),2003.
[8]崔先強(qiáng),楊元喜,高為廣.多種有色噪聲自適應(yīng)濾波算法的比較[J].武漢大學(xué)學(xué)報(bào):信息科學(xué)版,2006,31(8):731-735.
[9]楊元喜,崔先強(qiáng).動(dòng)態(tài)定位有色噪聲影響函數(shù)——以一階 AR 模型為例[J].測(cè)繪學(xué)報(bào),2003,32(1):6-10.
[10]吳富梅,楊元喜.顧及有色噪聲的光纖陀螺信號(hào)的抗差譜分析[J].測(cè)繪科學(xué)與工程,2006,26(3):50-53.
[11]楊元喜.自適應(yīng)動(dòng)態(tài)導(dǎo)航定位[M].北京:測(cè)繪出版社,2006,178-185.
[12]楊元喜.抗差估計(jì)理論及其應(yīng)用[M].北京:八一出版社,1993.
[13]劉永紅,范躍祖.激光陀螺漂移的非平穩(wěn)隨機(jī)信號(hào)建模[J].戰(zhàn)術(shù)導(dǎo)彈控制技術(shù),2004,46(3):99-102.
[14]YANG Y.Robust Estimation of Geodetic Datum Transformation [J].Journal of Geodesy,1999,73(5):268-274.
[15]YANG Y,CHENG M K,SHUM CK,et al.Robust Estimation of Systematic Errors of Satellite Laser Range[J].Journal of Geodesy,1999,73(7):345-349.
猜你喜歡
童話王國(guó)·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2022年3期)2022-03-16 05:55:08
當(dāng)代陜西(2021年2期)2021-03-29 07:41:24
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
媽媽寶寶(2017年3期)2017-02-21 01:22:28
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
中國(guó)塑料(2016年3期)2016-06-15 20:30:00
通信電源技術(shù)(2016年3期)2016-03-26 07:13:38
核科學(xué)與工程(2015年4期)2015-09-26 11:59:03
