基于ARM Cortex-M3的艦用無線振動檢測系統*
2014-12-02 06:07:06
艦船電子工程 2014年9期
(海軍大連艦艇學院 大連 116018)
1 引言
艦體的振動對艦艇的結構影響較大,嚴重時可以造成結構的損壞,還能使艦上儀表、設備破損或失靈,破壞艦艇的穩定性,影響艦上人員的工作效率以及生活的舒適性[1]。所以在艦艇試航時進行艦體以及艦上設備的振動檢測是一項很重要的工作。因此需要設計研發了一套振動檢測系統,可以對艦艇和艦上設備進行振動檢測。同時由于艦艇環境的特殊性,這就需要多點檢測和無線傳輸,并且也要求各個節點能工作更長時間,所以需要設計出低功耗系統。本文介紹一種運用低功耗高性能微處理器(MCU)作為核心,采用三軸數字加速度計作為測量元件的無線檢測系統。這種無線振動檢測系統具有安裝方便、體積小攜帶便利、精度高、速度快的特點。
2 組成與設計原理
基于ARM Cortex-M3的艦用無線振動系統組成如圖1所示,其中MCU 采用基于ARM Cortex-M3內 核[2~3]的32 位單片機STM32F103C8T6[4]。由于在艦上檢測過程中,需要在多個點檢測采集數據,所以整個系統由多個檢測節點、一個匯聚節點和上位機組成,其中檢測節點最多可以有123個。檢測節點由MCU 模塊、三軸加速度模塊、無線模塊組成。其中由MCU 模塊中的單片機接受傳感器數據并控制無線模塊發送數據。匯聚節點則是由MCU模塊接受無線模塊傳輸的檢測節點數據,然后通過USB接口將數據上傳到上位機。
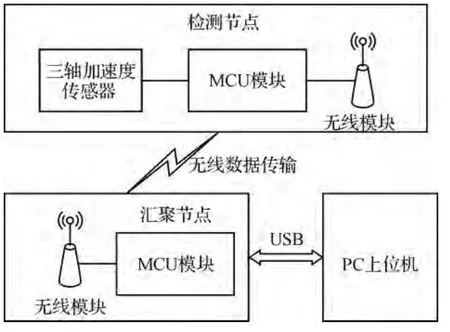
圖1 無線振動檢測系統框架結構
具體工作流程如下:初始化后,檢測所有存在的檢測節點的完好性并反饋信息,然后進入數據采集階段。各個檢測節點的傳感器模塊檢測到的所在位置的三軸加速度數值,MCU 模塊通過I2C 數字接口采集數值,并通過SPI總線控制無線模塊發送數據。匯聚節點接收各個檢測節點的數據并由MCU 通過USB傳輸數據給上位機,上位機顯示數值并保存數據,也可以打印結果。
3 硬件設計
3.1 MCU 模塊
系統所采用的STM32F103C8T6[4]是屬于STM32F103 系列微控制器中的一種,是基于ARM Cortex-M3[2]的32位增強型微控制器,可用于高度集成和低功耗的嵌入式應用,開發較為簡單快捷,可以使用廣泛應用的MDK 開發環境進行開發[5]。這一系列的MCU 可以工作在72MHz的主頻上,運算速度達1.25DMips/MHz(Dhrystone 2.1),具有零等待周期的存儲器,可以運行單周期乘法和硬件除法。外設包括有64K 的Flash程序存儲器和20K 的SRAM。在這次使用48 引腳產品上具有37個多功能雙向5V 兼容的I/O 口。有16個外部中斷,可以任意映射到任何一個I/O 口。總共有7個定時器,其中3個16位普通定時器,每個定時器有多達4 個用于輸入捕獲\輸出比較\PWM 或脈沖計數的通道,1個16位6通道高級控制定時器,具有多達6路的PWM 輸出能做到死區控制、邊緣\中間對齊波形和緊急制動。2 個看門狗定時器和1個24位自減型系統時間定時器。有9個通信通道,包括2個I2C接口,3個USART 接口,支持ISO7816、LIN、IrDA 接口和調制解調控制,2個SPI同步串行接口(18mb/s),1個CAN 接口,1個USB2.0接口。使用2.0~3.6V 供電和I/O 管腳。內嵌晶體振蕩器和RC 振蕩器,使用PLL供應CPU 時鐘,具有帶校準功能的32kHz RTC振蕩器。有兩個12位數模轉換器,1μs轉換時間,具有雙采樣和保持功能。可以采用睡眠、停機和待機模式等節能模式,可以使用Vbat為RTC和后備寄存器供電。調試模式為串行線調試和JTAG 接口[6]。
3.2 無線模塊
nRF24L01[7]是一款單片無線收發器芯片,工作在2.4GHz~2.5GHz通用ISM 頻段。無線收發器包括:nRF24L01 由頻率發生器、增強型SchockBurst模式控制器、功率放大器、晶體振蕩器、調制器、解調器等功能模塊組成,不需要外加濾波器也可以得到良好的通信效果。最高工作速率2MBps,高效GFSK 調制,抗干擾能力強,特別適合工業控制場合。具有126個頻道,滿足多點通信和調頻通信需要,內置硬件CRC 檢錯和點對多點通信地址控制。nRF24L01 使用SPI接口可以和任何MCU 進行通信,其中地址、輸出功率、頻道選擇和協議都可以通過SPI接口進行設置,可以接受5V 電平輸入。芯片封裝面積小,使用20腳QFN 4×4mm 封裝。具有極低的電流消耗:當工作在發射模式下,發射功率為-6dBm 時電流消耗為9.0mA,接收模式時為12.3mA,掉電模式和待機模式下電流消耗更低。芯片可以軟件設置空閑模式、關機模式,易于節能設計。適合工業數據采集、無線報警及安全系統等諸多領域應用。無線模塊的電路圖如圖2所示。
3.3 傳感器模塊
采用低功耗的高分辨率三軸數字加速度計ADXL345[8],這一款加速度計分辨率高達13 位,測量范圍為±16g。具有超低功耗:Vs=2.5V 時,測量模式下低至23μA,待機模式下為0.1μA 功耗隨帶寬自動按比例變化用戶可選的分辨率,包括10位固定分辨率、全分辨率,分辨率隨g范圍提高而提高,±16g時高達13位(在所有g范圍內保持4mg/LSB的比例系數)嵌入式存儲器管理系統采用FIFO 技術,可將主機處理器負荷降至最低。能夠進行單振/雙振檢測、活動/非活動監控、自由落體檢測。電源電壓范圍:2.0V~3.6V。I/O 電壓范圍:1.7V~VS。靈活的中斷模式,可映射到任一中斷引腳。通過串行命令可選測量范圍,通過串行命令可選帶寬。寬溫度范圍(-40℃~+85℃)。抗沖擊能力達到10000g采用3×5×1mm 的LGA封裝。數字輸出數據為16位二進制補碼格式,可通過SPI(3線或4線)或I2C 數字接口訪問,在本 系統中采用了I2C數字接口進行數據訪問。
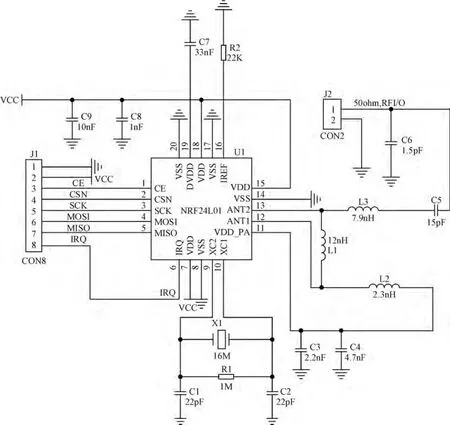
圖2 無線模塊電路圖
3.4 總體硬件設計
系統包括最多123個檢測節點和1個匯聚節點組成。檢測節點電路包括傳感器模塊電路、MCU 及外圍電路和無線射頻模塊,如圖3所示。其中傳感器模塊由于采用的是三軸數字加速度傳感器,所以直接輸出數字信號,通過I2C 數字接口傳輸給MCU,而MCU 則通過SPI數據總線控制無線模塊發送測量得到的數據。各個節點上還帶有按鍵電路用來修正和更改檢測節點的無線射頻地址和三軸加速度傳感器的量程[9]。
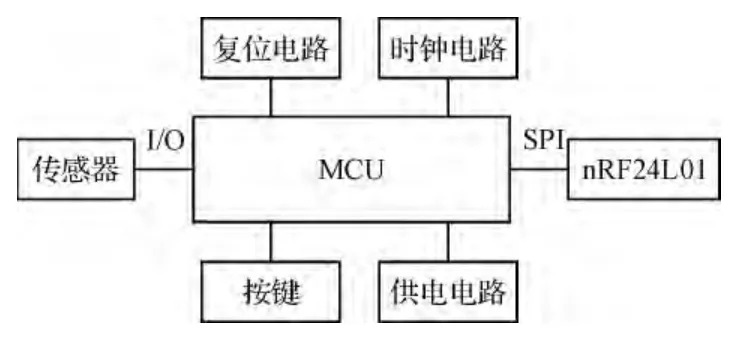
圖3 測量節點組成
匯聚節點電路由無線射頻模塊電路和MCU及外圍電路以及USB接口電路組成,如圖4所示。由于STM32F103 單片機沒有片上USB 控制器,所以需要一個USB接口芯片。
這里選用了PDISUSBD12[10]芯片,并使用自定義USB HID[11]設備的形式與上位PC 進行通信,這種方式的優點是不需要開發專門的驅動,連接方便。采集節點的MCU 通過USB 接收上位機的指令,并用SPI總線控制無線射頻電路收發信息,再通過USB把收到的數據傳給上位機。
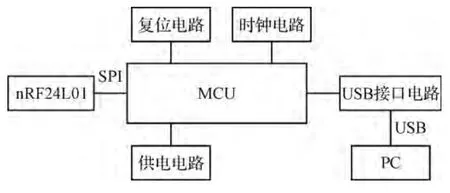
圖4 匯聚節點組成
4 軟件設計
4.1 檢測節點軟件設計
檢測節點通過傳感器模塊測量節點所在位置的瞬時加速度,通過無線模塊把測量數值傳輸給匯聚模塊。由于整個系統有多個檢測節點,而匯聚節點在同一時間只能接收一個檢測節點的數據,所以檢測節點必須相隔一定時間,把數據打包發射,數據在發射前存儲在MCU 的SRAM 內,由于單個檢測節點一次發射的數據量不是很大,采用依次通信的方式,軟件設置一個循環為18ms。各個檢測節點有不同的無線射頻發射地址ID,當需要更改地址的時候可以通過按鍵進行修改。
4.2 匯聚節點軟件設計
匯聚節點在接收到上位機發出的采集信息的指令后,給系統中存在的各個檢測節點地址依次發送指令,得到回復信息后把接收到的各個檢測節點的數據上傳給上位機顯示。如果某個地址沒有回復,就上傳這個地址為空的信息。采集節點與上位機連接是用USB接口,并且是作為上位機的USD_HID 設備。通過USB把數據傳輸給上位機。
4.3 上位機軟件設計
上位機軟件用來控制采集節點發送指令并顯示和存貯匯聚節點接收和上傳的各個檢測節點的數據,如圖5所示,上部表格顯示系統中存在的檢測節點的數量和實時狀態,下部顯示波形圖。可以選擇顯示XYZ各軸的波形,或者三者同時顯示。并且數據也可以保存為文件存儲在上位機硬盤上。
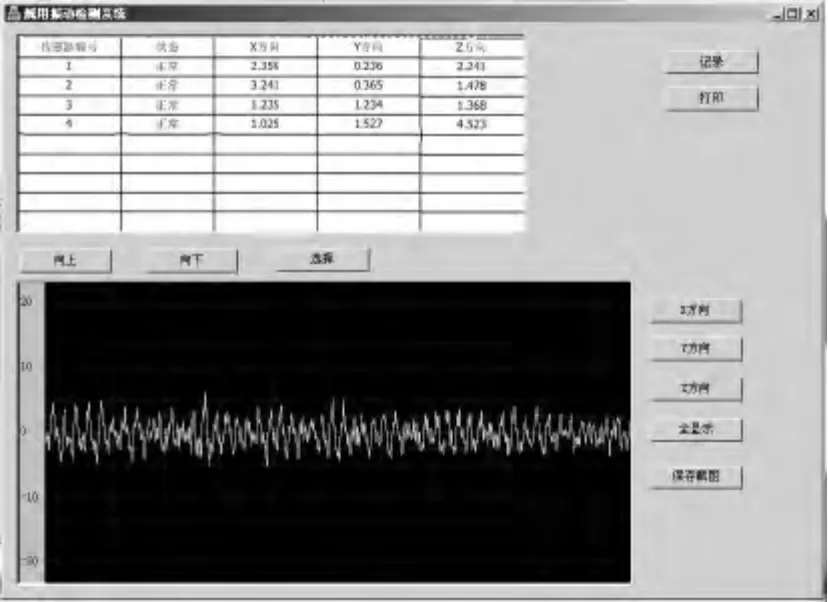
圖5 上位機程序的GUI界面
5 結語
本系統充分利用具有Cortex-M3內核的32位微控制器STM32F103的高效性和低功耗,采用低功耗的nRF24L01 無線數傳芯片和ADXL345 三軸加速度傳感器芯片,可以滿足多點大面積振動檢測的工作需求,同時也保證了低功耗的運行,使系統在使用的時候能有較長的工作時間。如果是需要在更大振動加速度的場合,可以更換較大量程的三軸加速度傳感器。在實際測試中,測試節點與采集節點的最遠無線傳輸距離可以達到200m,同時安裝與使用方便,具有低功耗、實時性強、擴展容易、成本低廉的特點,非常適合在艦船上使用,具有廣泛的應用推廣前景。
[1]姚振亮,張阿漫.船體振動與噪聲[M].北京:國防工業出版社,2010,8:51-72.
[2]ARM 公司Cortex-M3技術參考手冊[EB/OL].2009:1-10.
[3]ARM 公司Cortex-M3用戶指導用書[EB/OL].2009:1-6.
[4]意法半導體公司STM32F103 增強型系列數據手冊[EB/OL].2009:1-4.
[5]李寧.基于MDK 的STM32 處理器開發應用[M].北京:北京航空航天大學出版社,2008:43-45.
[6]彭剛,秦志強.基于ARM Cortex-M3的STM32系列嵌入式微控制器應用實踐[M].北京:電子工業出版社,2011:32-37.
[7]諾迪克半導體公司.單芯片發送接收nRF24L01產品技術規格說明[EB/OL].2006:2-7.
[8]邏輯設備公司.3軸數字加速度計ADXL345數據手冊[EB/OL].2009:1-7.
[9]喬立升,吳積欽,徐可佳.無線組網技術在接觸網振動試驗系統中的應用[J].現代電子技術,2009,30(1):33-35.
[10]飛利浦PDIUSBD12數據手冊[EB/OL].2001:1-5.
[11]馬偉.計算機USB系統原理及其主/從機設計[M].北京:北京航空航天大學出版社,2004:20-25.
猜你喜歡
科學大眾(2023年17期)2023-10-26 07:39:14
工業設計(2022年8期)2022-09-09 07:43:20
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
天天愛科學(2020年6期)2020-09-10 07:22:44
數學物理學報(2017年6期)2018-01-22 02:26:40
家庭影院技術(2017年9期)2017-09-26 03:41:45