一種具有容錯功能的開關磁阻電機初始位置估計方法
2014-11-25 09:34:54王云林張云龍
電工技術學報 2014年7期
張 磊 劉 闖 王云林 張云龍
(南京航空航天大學自動化學院 南京 210016)
1 引言
開關磁阻電機(Switched Reluctance Motor,SRM)具有結構簡單堅固、無永磁材料、成本低、控制靈活、容錯能力強等特點,在航空航天、電動汽車、牽引提升等領域具有很好的前景。但在實際應用中,都需要位置傳感器獲取轉子的位置信息,這不僅會增加系統的成本和復雜度,而且也降低了系統的可靠性,因此,研究無位置傳感器技術具有十分重要的實際意義。
近年來,國內外學者對開關磁阻電機無位置傳感器技術進行了廣泛的研究,從靜止位置、低速、中高速提出了很多方法,文獻[1-4]利用電機相電感與轉子位置之間的關系,研究在低速情況下通過注入高頻脈沖估計轉子的位置信號。文獻[5-9]利用SRM 的電磁特性、轉子位置、相電流之間的關系,通過查表、智能算法、以及觀測器等方法實現電機的位置估計。文獻[10]利用位置檢索脈沖來估計轉子轉速和位置信號,并對無位置傳感器容錯技術進行了研究。文獻[11-18]對SRM 初始位置估計進行了研究,其中文獻[11-14]通過對SRM 各相繞組同時注入高頻脈沖,通過比較脈沖電流峰值的大小來判斷轉子的初始位置,該方法算法簡單,但忽略了電感最大和最小區域因電感變化微小給位置估計帶來的誤差。文獻[15]在文獻[11-14]的基礎上對預估相的選取進行了魯棒分析,提高位置估計的精度。文獻[16]提出通過脈沖電流到達給定閾值的時間來判斷位置估計相,方法簡單易于實現。文獻[17,18]利用自舉電路中的電容充電電流幅值與相電感的關系估計SRM 的初始位置。文獻[19]提出全周期電感法實現無位置傳感器初始定位和起動控制,并對起動運行進行了缺相容錯研究。
從國內外文獻看,針對SRM 無位置傳感器技術研究,目前主要是針對電機運行在正常狀態下提出的位置估計策略,而在電機出現故障狀態下的無位置傳感器技術研究很少,特別是在故障狀態下SRM 初始位置判斷還未見文獻報道,所以,如何保證電機在故障狀態下仍然能正常無反轉起動是提高電機傳動系統容錯能力的關鍵。
本文提出一種雙電流閾值電感分區的開關磁阻電機初始位置估計方法。該方法能夠解決在電感最大和最小區域因電感變化微小而降低了處理器處理精度的問題。同時,為了提高電機起動的可靠性,本文對電機缺相容錯狀態下的初始位置估計也進行了研究,通過實驗驗證了所提方法的可行性。
2 雙電流閾值電感分區基本原理
2.1 相電感分區策略
本文樣機為12/8 結構的三相開關磁阻電機,電機一個電感周期為 360°(本文中的角度都為電角度),將一個電感周期均分為6 個分區,每個分區為60°,其中,電感最大和最小區域分別為一個分區(見圖1),從圖1 可以看出,在任何一個分區里都有一相電感為上升區、一相電感為下降區、而另一相電感不是處在最大區域,就是處在最小區域。以C相為例,電角度為[150°,210°]∪[330°,390°]區域分別為電感最大區域和最小區域,電角度在[210°,330°]區域為電感下降區域,電角度在[30°,150°]區域為電感上升區域,其他兩相分區范圍如此相同。
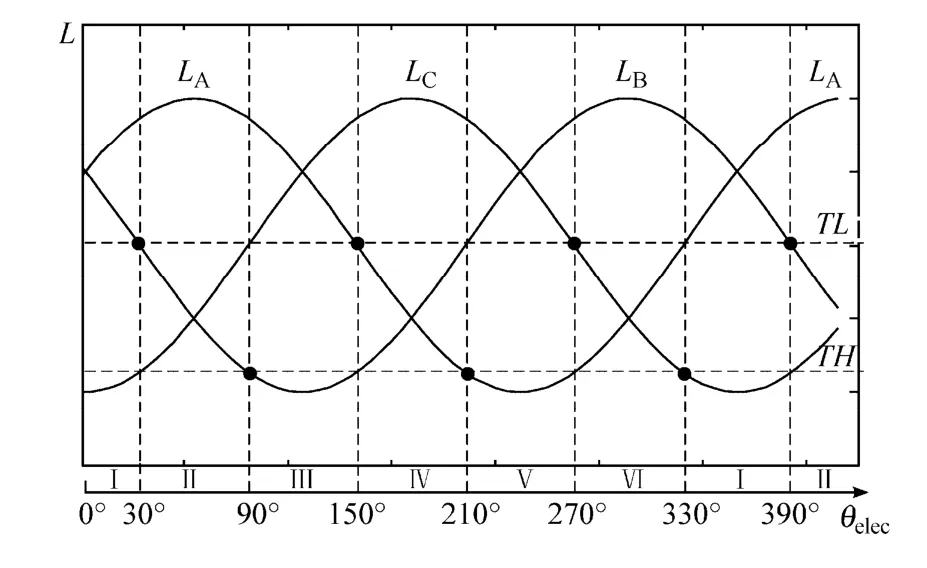
圖1 三相電感分區Fig.1 The inductance subregion
2.2 初始分區估計策略
忽略反電動勢和繞組電阻壓降,脈沖電流與相電感成反比關系,圖2 給出SRM 慣性運行下,同時對三相繞組注入高頻脈沖得到的脈沖電流波形,根據2.1 論述的電感分區策略,得到三相脈沖電流的6 個分區(見圖2),由于在脈沖電流最大和最小區域,脈沖電流變化微小,所以要在該區域利用脈沖電流來估計轉子位置精確度不高,因此,需要通過選擇脈沖電流的閾值來選擇合適的估計相,以減小位置估計的誤差。

圖2 脈沖電流及分區Fig.2 The pulse current and subregion
依據電感和脈沖電流的6 個分區來設定雙電流閾值的位置,本文將低電流閾值TL 選定在電角度30°位置,高電流閾值TH 選定在電角度90°位置,利用估計相的脈沖電流峰值分別與TH、TL 比較,判斷轉子的初始分區和初始起動相,由此得到表1的初始分區判斷邏輯。例如,如果B 相脈沖電流峰值iB_peak<TL,且A 相脈沖電峰值iA_peak<TL,則判斷轉子初始分區為I,即A 相為初始起動相;如果C 相脈沖電流峰值TL<iC_peak<TH,并且B 相脈沖電流峰值TL<iB_peak<TH,則判斷轉子初始分區為II,即C 相為初始起動相。其他初始分區的判斷如此類推(見表1)。特別說明的一點是:該方法始終是選擇脈沖電流處在上升和下降區域的相為估計相,所以位置估計的精度高,以初始分區I 為例說明,該區域A 相和B 相為估計相,C 相為非估計相,因為C 相脈沖電流處在最大區域,相脈沖電流變化微小,而A 相和B 相脈沖電流處在電感上升和下降階段,脈沖電流變化率大,所以用A 相和B 相作為估計相估計出來的初始分區分辨率高,估計誤差小。其他分區也是同樣道理。

表1 初始位置分區估計Tab.1 Initial rotor position estimation
3 轉子初始位置角估計
3.1 初始位置角估計模型的建立
繞組電感與脈沖電流成反比,靜止狀態向繞組注入高頻脈沖,每個脈沖電流峰值為

式中 U ——直流母線電壓;
L(θ)——相電感;
Δt——脈沖時間。
在閉環控制系統中,需要知道轉子的確切初始位置角,本文通過對電機初始分區的判斷再結合脈沖電流峰值包絡線與位置角之間的關系模型θ-ipeak來估算轉子初始位置角。
圖3 是脈沖電流峰值包絡線曲線示意圖,圖中實線部分為估計相的脈沖電流包絡線。為了建立脈沖電流峰值包絡線與位置角之間的關系模型θ-ipeak,只需實測任一個相的脈沖電流峰值包絡線,為了方便分析不同區域的數據,本實驗實測C 相半電感周期[180°,360°]的脈沖電流,通過向C 相繞組注入高頻脈沖信號,每隔2°實測一對數據,利用式(1)計算出該位置下的脈沖電流峰值ipeak,圖4是實測的θC-ipeak關系曲線。從圖中可以看出在[210°,330°]之間曲線上測試點較細,越到兩端越密,所以利用[210°,330°]之間的脈沖電流峰值估計位置誤差較小,這與前面估計相的選擇分析相一致。

圖3 三相脈沖電流峰值包絡線與分區關系Fig.3 Relationship between amplitude of pulse current and inductance subregion
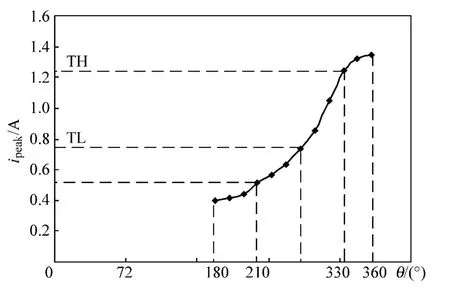
圖4 實測的脈沖電流峰值與位置關系Fig.4 Relationship between peak current and position
為了建立脈沖電流峰值包絡線與位置角之間的關系模型,采用曲線擬合的方法,考慮便于微處理器計算和算法的簡單,本文選擇多相式擬合方法求得θ-ipeak的數學模型

為了得到更高的擬合精度,圖5 給出了從4 階到8 階多項式函數擬合的誤差曲線,綜合比較各階數的誤差曲線,在[210°,330°]之間,階數n=8 擬合誤差最小,所以本文選擇階數n=8 來擬合脈沖電流峰值包絡線與位置角之間的數學模型。

圖5 不同階數n 的擬合誤差Fig.5 Fitting error different orders
3.2 轉子初始位置角估計方法
根據表1 判斷出轉子的初始分區,再選擇對應的估計相脈沖電流峰值包絡線與位置角θ-ipeak關系模型估算初始位置角。三相脈沖電流峰值包絡線為周期性的分段函數,每相脈沖電流峰值包絡線上升曲線之間相差120°,下降曲線之間也相差120°,所以三相脈沖電流峰值θ-ipeak初始位置角度估計模型為

θ-ipeak關系模型的選擇是依據電機初始分區而定,但在任一初始分區都有兩相估計相。如轉子在初始分區I 為例,從圖1 電感分區可以看出,在該分區里A 相和B 相可以作為估計相。但在[330°,360°]之間,B 相電感接近電感最大區域,電感變化率絕對值逐漸變為最小,而A 相電感處在電感上升階段,電感變化率大,所以轉子在[330°,360°]之間選擇A 相θA-ipeak關系模型來估算初始位置角的精度要比選擇θB-ipeak關系模型高,即A 相作為估計相;同理,轉子在[360°,390°]之間選擇B 相θB-ipeak關系模型估算初始位置角的精度比選擇θA-ipeak關系模型高,即B 相作為估計相。而這兩個區間的判別可通過比較A、B 兩相脈沖電流峰值大小確定,當iA_peak>iB_peak,轉子在[330°,360°]之間,當iA_peak<iB_peak,轉子在[360°,390°]之間。其他初始分區對應的θ-ipeak關系模型的選擇與此道理相同,此處不再贅述,見表2。

表2 初始分區和θ-ipeak的選擇Tab.2 Initial subregion and θ-ipeak
4 缺相容錯狀態初始位置估計
雙電流閾值電感分區初始位置估計方法需要三相脈沖電流信息實現分區和估計相的選擇,當電機發生缺相故障時,故障相的脈沖電流無法得到,所以,上述方法可能失效,為了滿足系統缺相容錯運行的要求,本文通過正常相脈沖電流信息間接估計初始位置角,并在靜止和慣性運行狀態下,對電機缺相運行初始位置角估計進行了實驗研究。
當A 相缺相,A 相脈沖電流為零,此時利用正常相B 相和C 相脈沖電流峰值與雙電流閾值比較來判斷初始分區。從圖2 可以看出,如果iC_peak>TH,可判斷初始分區為I,如果iB_peak>TH,判斷初始分區為III,如果TL<iC_peak<TH,TL<iB_peak<TH,可判斷初始分區為II,如此類推,其他初始分區同樣可以由B 相和C 相判斷出來,不需要A 相脈沖電流信息參與判斷。因為在任一個分區里都有兩相θ-ipeak關系模型可選,所以在電機缺一相故障運行下不影響θ-ipeak關系模型的選擇,表3 給出了電機發生缺A 故障運行情況下初始分區判斷和θ-ipeak關系模型選擇邏輯表。當B 相或C 相發生缺相故障時,同樣可以用另外兩相正常相來完成初始位置角估計,理論與此相同。

表3 缺A 相初始位置估計方法Tab.3 Initial position estimation lacking phase A
5 實驗驗證
為驗證本文方法的可行性,在一臺12/8 結構SRM 樣機上進行了實驗,實驗平臺如圖6 所示。其中樣機額定功率 1.5kW、額定轉速1 500r/min。A為輔助電源、B 為dSPACE 主控系統、C 為采樣、保護與調理電路、D 為功率變換器、E 為機械分度頭、F 為12/8 結構的開關磁阻電機。

圖6 實驗平臺Fig.6 Experiment platform
本試驗中,母線電壓10V,低電流閾值TL 為0.564A,高電流閾值TH 為1.175A,脈沖注入頻率為1kHz,占空比為40%。
5.1 靜止時初始位置估計
圖7 是電機分別靜止在17°和26°位置時轉子初始位置角估計的實驗波形。從圖7a 可以看出,實驗得到iB_peak<TL,iC_peak<TL,iB_peak<iC_peak根據表1 給出的初始分區估計策略,可以判斷轉子當前初始分區為V,再依據表2 和iB_peak<iC_peak,可選擇C 相脈沖電流峰值包絡線θC-ipeak關系模型來估算轉子初始位置角,實驗估算出的轉子初始位置角(θest)為17.32°,與實際轉子初始位置角相差只有0.32°。從圖7b 可以看出,實驗得到iB_peak<TL,iA_peak<TL,iB_peak<iA_peak,依據表1 判斷出轉子當前初始分為I,再由表2 和iB_peak<iA_peak,選擇A相脈沖電流幅值包絡線θA-ipeak關系模型來估算轉子初始位置角,實驗估算出的轉子初始位置角度(θest)為25.69°,與實際轉子初始位置角相差0.31°。由實驗看出轉子在17°和26°位置上估計出的初始位置角誤差幾乎相同,這是因為所選擇的估計相C 相和A 相在這兩個位置上是對稱的,電感相同,電感的變化率也相同。表4 是轉子靜止在不同位置下的初始位置角估計誤差,從誤差數據看出,所有初始位置的估計誤差最大不超過0.51°,因此可以實現電機無反轉起動。
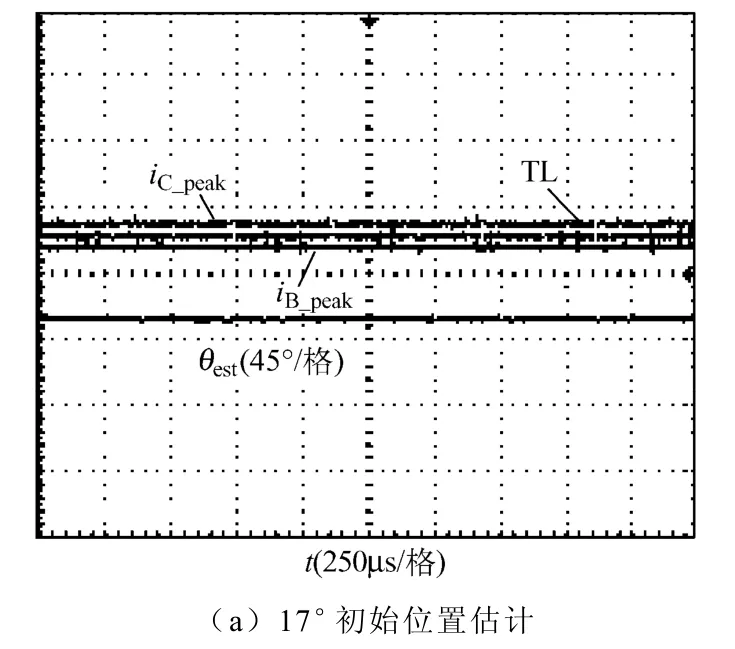

圖7 靜止時轉子初始位置角估計Fig.7 Initial position estimation at standstill

表4 不同初始位置角下的估計誤差Tab.4 Different initial position estimation errors(單位:°)
5.2 慣性運行狀態初始位置估計
電機在運行中可能存在一些特殊情況,需要關斷開關管,但電機由于慣性還繼續運行,如果在電機還沒有靜止時需要再次起動電機,在開通開關管之前電機繞組上沒有電流,同樣可以采用本文的方法估計電機初始位置角,向各相同時注入脈沖,比較各相脈沖電流峰值與雙電流閾值大小,判斷轉子初始分區,根據初始分區選擇相應的θ-ipeak關系模型來估計轉子的初始位置角。圖8 給出電機初始轉速為288r/min 時三相脈沖電流和初始位置角估計波形。從實驗波形可以看出,在電機慣性運行狀態時,該方法同樣可以估計出初始位置信息,在電機頻繁起制動環境下具有很好的適用性。

圖8 初始轉速288r/min 位置估計Fig.8 Initial position estimation at 288r/min
5.3 缺相靜止時初始位置估計
當電機發生缺相故障時,電機進入缺相運行狀態,此時可根據第4 節所論述的電機缺相故障初始位置估計策略實現容錯位置估計。圖9 是缺相故障下電機靜止在8°位置時初始位置估計實驗波形,從圖9a 實驗波形可以看出,當A 相缺相以后,A 相的脈沖電流為零,只能由B 相和C 相作為位置估計相,實驗測得B 相的脈沖電流峰值iB_peak=0.832A,C 相脈沖電流峰值iC_peak=0.375A,實驗中高電流閾值TH 為1.175A,低電流閾值TL 為0.564A,所以TL<iB_peak<TH、iC_peak<TL,根據表3 缺相故障初始位置估計方法,判斷出轉子初始分區為IV,選擇B 相脈沖電流峰值包絡線與位置角的θ-ipeak關系模型來估算轉子的初始位置角,實驗估算出初始位置角度θest=8.32°,估計誤差只有0.32°。圖9b 是缺C相故障狀態的實驗波形,從實驗波形可以看出,A相脈沖電流峰值iA_peak=1.032A,測得的B 相脈沖電流峰值 iB_peak與缺 A 相情況下測得的值相同為0.832A,所以TL<iB_peak<TH、TL<iA_peak<TH,從而判斷轉子初始分區為IV,同樣選擇B 相脈沖脈沖電流峰值包絡線與位置角的θ-ipeak關系模型來計算轉子的初始位置角,估算得到θest=8.32°。所以,電機在缺任意一相故障下,該方法仍能通過其他正常相估計出電機的初始位置角。

圖9 缺相靜止狀態初始位置估計Fig.9 Initial position estimation under lacking-phase and standstill
5.4 缺相慣性運行初始位置估計
當電機缺相慣性運行時,本文所提的缺相故障初始位置估計方法同樣可以適應,各相同時注入脈沖,檢測正常相的脈沖電流峰值信息,根據第4 節所論述的方法實現初始位置角估計。圖10 給出電機在不同慣性速度下缺相運行的初始位置估計實驗波形。其中,圖10a 和圖10b 為缺A 相故障下初始位置估計實驗波形,圖10c 和圖10d 為缺B 相故障下的初始位置估計實驗波形,從實驗波形可以看出,電機從正常慣性運行到缺相慣性運行切換時,系統仍可以通過正常相的脈沖電流信息較好地實現初始位置角的估計,并且切換很平穩,能夠實現電機無反轉起動。

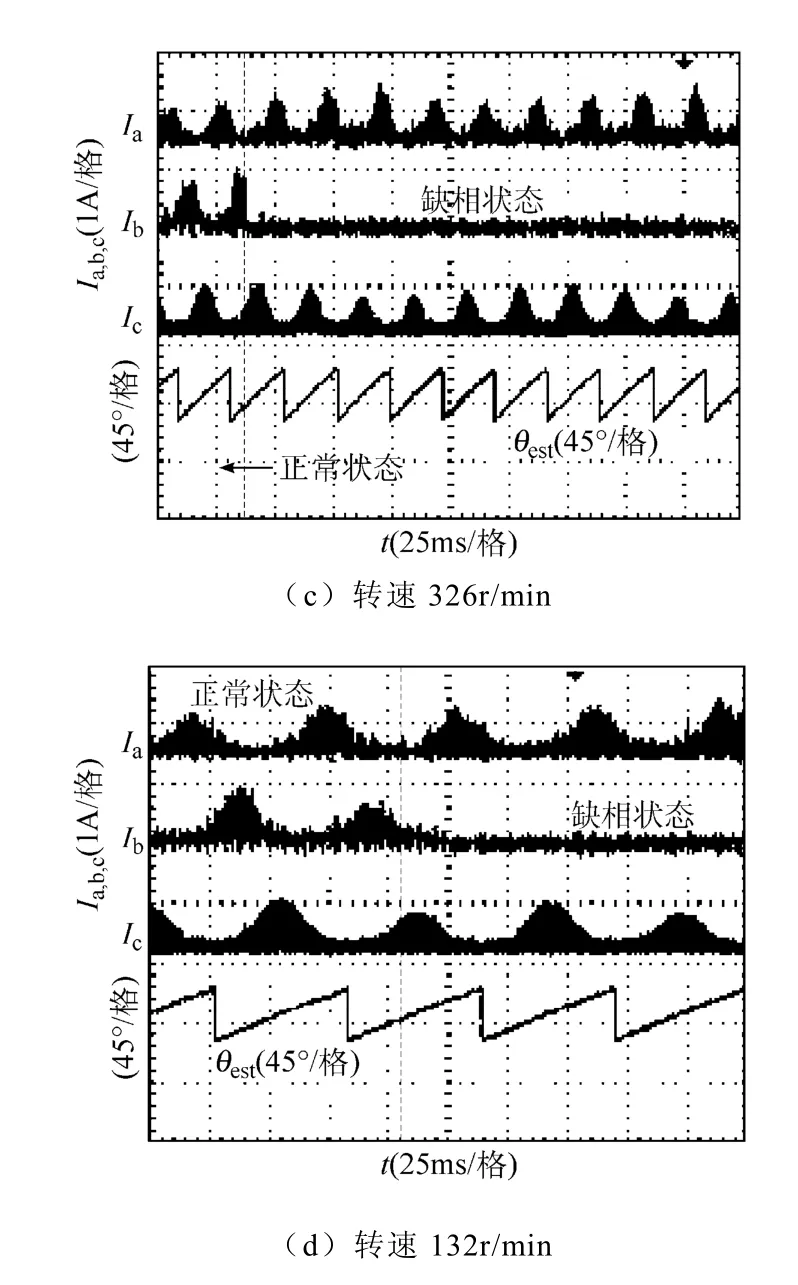
圖10 缺相慣性運行初始位置估計Fig.10 Initial position estimation under lacking-phase and initial position
6 結論
本文提出一種基于雙電流閾值的電感分區初始位置估計方法,利用脈沖電流峰值與位置角度的關系模型估算轉子的初始位置角,該方法具有以下特點:
(1)無需增加系統的硬件資源,算法簡單,易于實現,可適應不同定轉子結構的開關磁阻電機,具有很強的通用性。
(2)將雙電流閾值與電感分區以及脈沖注入相結合,提高了轉子初始位置角度估計的精度。
(3)通過對靜止、慣性運行、缺相故障三個狀態下實驗,驗證了本文所提出的無位置傳感器技術SRM 初始位置估計方法的有效性和實用性。
[1]Khalil A,Husain I.Four quadrant sensorless operation of a switched reluctance machine using fourier model[C].Power Electronics Specialists Conference,PESC '06,2006:1-8.
[2]Ahmed Khalil,Iqbal Husain.Four-quadrant pulse injection and sliding-mode-observer-based sensorless operation of a switched reluctance machine over entire speed range including zero speed[J].IEEE Transactions on Industry Applications,2007,43(3):2007:714-723.
[3]辛凱.開關磁阻電機滑模觀測器間接位置檢測研究[D].武漢:華中科技大學,2007.
[4]李景男,王旭東,周永琴.基于兩相脈沖激勵的開關磁阻電動機無位置傳感器轉子位置檢測[J].電機與控制學報,2002,6(1):6-9.Lin Jingnan,Wang Xudong,Zhou Yongqin.Sensorless rotor position detection of SRM based on voltage pulses to two phase[J].Electric Machines and Control,2002,6(1):6-9.
[5]邱亦慧,詹瓊華,馬志源.基于簡化磁鏈法的開關磁阻電機間接位置檢測[J].中國電機工程學報,2001,21(10):59-62.Qiu Yihui,Zhan Qionghua,Ma Zhiyuan.The indirect position sensing of SRM on the basis of simplified flux method[J].Proceedings of the CSEE,2001,21(10):59-62.
[6]鄭洪濤,蔣靜坪,徐德鴻,等.開關磁阻電動機無位置傳感器能量優化控制[J].中國電機工程學報,2004,24(1):153-157.Zheng Hongtao,Jiang Jingping,Xu Dehong,et al.Switched reluctance motor sensorless drive with energy optimizing control strategy strategy[J].Proceedings of the CSEE,2004,24(1):153-157.
[7]李珍國,李彩紅,闞志忠,等.基于改進型簡化磁鏈法的開關磁阻電機無位置傳感器速度控制[J].電工 技 術 學 報,2011,26(6):62-66.Li Zhenguo,Li Caihong,Kan Zhizhong,et al.Switched reluctance motor sensorless speed control based on the improved simplified flux method[J].Transactions of China Electrotechnical Society,2011,26(6):62-66.
[8]夏長亮,王明超,史婷娜,等.基于神經網絡的開關磁阻電機無位置傳感器控制[J].中國電機工程學報,2005,25 (13):123-128.Xia Changliang,Wang Mingchao,Shi Tingna,et al.Position sensorless control for switched reluctancemotors using neural network[J].Proceedings of the CSEE,2005,25 (13):123-128.
[9]夏長亮,謝細明,史婷娜.開關磁阻電機小波神經網絡無位置傳感器控制[J].電工技術學報,2008,23(7):33-38.Xia Changliang,Xie Ximing,Shi Tingna.Position sensorless control of switched reluctance motor using wavelet neural networks[J].Transactions of China Electrotechnical Society,2008,23(7):33-38.
[10]蔡駿,鄧智泉.一種具有容錯功能的開關磁阻電機無位置傳感器控制方法[J].中國電機工程學報,2012,32(36):109-116.Cai Jun,Deng Zhiquan.A fault-tolerant sensorless control method for switched reluctance motor drives[J].Proceedings of the CSEE,2012,32(36):109-116.
[11]Gao H,Salmasi F R,Ehsani M.Senorless control of SRM at standstill[C].In Proc.APEC’00,2000:850-856.
[12]Gao Hongwei.Sensorless control of the switched reluctance motor drive at standstill and near-zero speed[D].Texas:Texas A&M University,2001.
[13]Krishnamurthy M,Edrington C S,Fahimi B.Prediction of rotor position at standstill and shaft condition in switched reluctance machines[J].IEEE Transactions on Power Electronics,2006,21(1):225-233.
[14]Amiri H,Afjei E,Ataei S.A novel sensorless technique for a new field assisted switched reluctance motor[C].International Symposium on Power Electronics,Electrical Drivers,Automation and Motion,2008:1077-1081.
[15]劉衛國,宋受俊,Wue Sweafer.無位置傳感器開關磁阻電機初始位置檢測方法[J].中國電機工程學報,2009,29(24):91-97.Liu Weiguo,Song Shoujun,Wue Sweafer.Initialposition estimation of sensorless switched reluctance motor[J].Proceedings of the CSEE,2009,29(24):91-97.
[16]Krishnamurthy M,Edrington C C,Fahimi B.Prediction of rotor position at standstill and rotating shaft conditions in switched reluctance machines[J].IEEE Transactions on Power Electronics,2006,21(1):225-233.
[17]Shen L,Wu J H,Yang S Y.Initial position estimation in SRM using bootstrap circuit without predefined inductance parameters[J].IEEE Transactions on Power Electronics,2011,26(9):2449-2456.
[18]沈磊,吳建華,楊仕友.基于自舉電路的開關磁阻電機初始位置估計方法[J].中國電機工程學報,2011,31(6):98-102.Shen Lei,Wu Jianhua,Yang Shiyou.A novel estimation method for initial position of switched reluctance motor based on bootstrap circuit[J].Proceedings of the CSEE,2011,31(6):98-102.
[19]蔡駿,鄧智泉.基于全周期電感法的開關磁阻電機無位置傳感器技術[J].電工技術學報,2013,28(2):145-153.Cai Jun,Deng Zhiquan.Sensorless control of switched reluctance motor based on full-cycle inductance method[J].Transations of China Electrotechnical Society,2013,28(2):145-153.
