一種航帶間點云高程差超限的校正方法
2021-02-05 08:40:30郭如寶
北京測繪 2021年1期
關鍵詞:系統
郭如寶
(內蒙古自治區航空遙感測繪院, 內蒙古 呼和浩特 010010)
0 引言
機載激光雷達(Light Detection And Ranging,LiDAR)集成了全球定位系統(Global Positioning System,GPS)、慣性導航系統(Inertial Navigation System,INS)、激光測距系統(Laser Scanning Ranging),可快速獲取地表物體的三維坐標信息[1-3]。近些年,隨著航空攝影技術的快速發展,機載LiDAR系統作為一種新的數據獲取模式,改變了傳統的數據獲取手段,進一步推動測繪地理信息行業的發展。
機載LiDAR系統飛行作業時,由于受飛行高度和激光掃描儀掃描視場角的限制,每條航帶只能覆蓋地面的一定寬度,要完成大面積作業就需要敷設多條航帶,相鄰航帶須保證一定重疊度。機載LiDAR系統各子系統本身及子系統間會存在一定的誤差,誤差會導致點云數據不同航帶的同名特征點存在系統性的三維空間偏移,會影響點云數據的相對精度[4-7]。同時,在飛行作業過程中,由于氣象條件、飛機姿態、IMU累計誤差、地面基站不均勻等客觀因素的影響,各航帶間可能會出現不規則的點云高程差超限的問題。
本項研究以通遼攝區為試驗區,采用一種對航帶間點云高程差超限的校正方法,對相鄰航帶進行整體平差,有效消除或減小了航帶間重疊區域的高程差異,并通過大量外業檢查點進行精度檢測,點云精度達到了相關規范要求的技術指標,最終驗證了這一校正方法的可行性,為解決其他類似問題提供一種思路。
1 試驗區概況
試驗區位于內蒙古自治區通遼市南部,東經121°30′00″~123°45′00″,北緯42°40′00″~43°40′00″,攝區面積17 710 km2。要求點密度≥0.25個/m2,點云旁向重疊度≥20%,點云高程精度優于0.3 m,未限制必須同步獲取影像數據,可采用夜間航攝飛行方式。
在試驗區范圍內及周邊選取四個全球導航衛星系統(Global Navigation Satellite System,GNSS)連續運行參考站為基準站,并架設兩個B級點作為補充基站,采用聯合基站的方法解算POS數據,將機載POS獲取的實時數據,通過精密基站坐標,修復定位精度,解算POS數據。
試驗區內布設了一個檢校場和三個精度驗證區。檢校場區域內需要一個校準建筑物和一個控制場,并且盡量遠離水面(如湖海、江河)等低反射率的地區,并包含平地和街道,檢校場航線采用3×4的方式布設。精度驗證區在距離基站、檢校場較遠、精度相對較弱且外業控制實施容易的區域選取,不同精度驗證區應選在不同地形條件、不同航線且相距較遠的區域,每個區選取20個以上檢測點,保證精度滿足要求。
試驗區獲取的高精度點云數據經去噪分類后,可生成1∶10 000比例尺高精度數字高程模型(Digital Elevation Model,DEM),結合衛星影像生成的數字正射影像(Digital Orthophoto Map,DOM)產品,通過等高線反衍技術,利用單片測圖的方式可快速生產1∶10 000比例尺數字線劃地圖(Digital Line Graphic,DLG),能有效填補內蒙古自治區1∶10 000比例尺無圖區的空白,是基礎地理信息數據的重要來源,為內蒙古自治區經濟建設、資源開發和生態監測管理發揮重要作用[8]。
2 點云數據獲取
2.1 技術流程
點云數據獲取分五個階段,分別是設計準備階段、飛行作業階段、數據處理階段、質量檢查階段和整理驗收階段。技術流程如圖1所示。
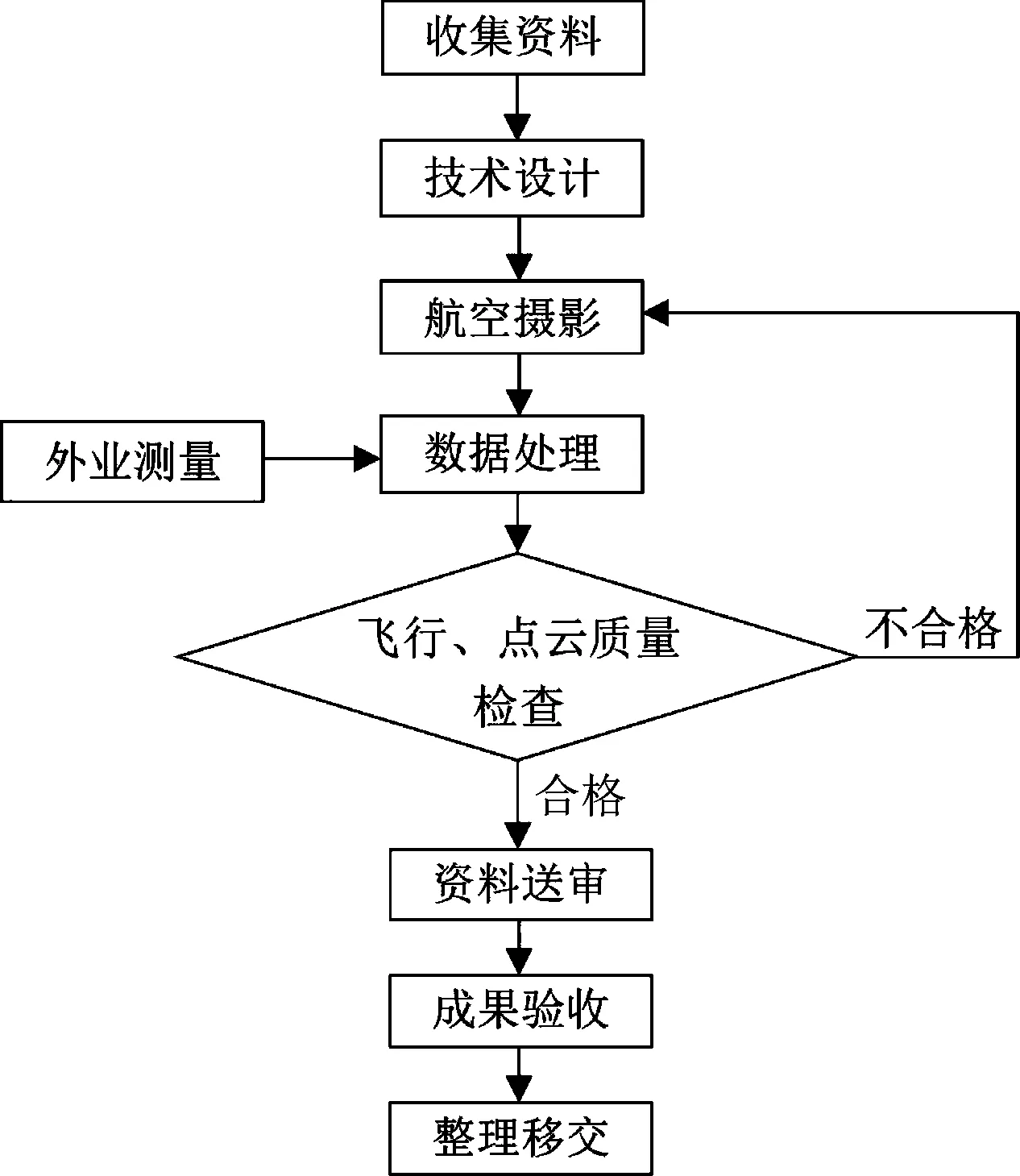
圖1 技術流程圖
(1)設計準備階段,需要掌握航攝區域的地形地貌、氣候、機場位置等情況,確定航攝區域的基準面,以此判斷攝區是否分區,根據航攝儀參數設計相對航高,從而確定攝區的絕對航高,根據攝區面積、位置走向設計航攝的飛行方向和飛行航線數,最后確定飛行航片數,編制航攝技術設計書。
(2)飛行作業階段,根據設計準備航攝儀,聯系通用航空公司,上報飛行計劃,辦理機場入場證。飛機調運至機場后,安裝航攝儀進行地面調試。選擇天氣晴好日進行航空攝影,每飛完一個架次后,及時將原始點云數據交數據處理人員,快速處理數據并檢查結果,以確定數據是否滿足符合規范要求,是否需要補飛或重飛。
(3)數據處理階段,原始點云數據為sdf格式,需利用RiANALYZE經過氣象修正后生成sdc格式的文件,再利用Inpho軟件的LPMaster模塊對經過修正的sdc格式的點云數據,結合外業控制點數據進行平面位置和高程位置糾正,同時糾正雙激光頭掃描航線的高程差,輸出激光雷達點云成果,并進行POS數據解算。
(4)質量檢查階段,需對整個攝區所有數據和文檔全數檢查,包括飛行質量、點云數據質量、附件質量和航攝文檔,編制質量檢查報告。
(5)整理驗收階段,由技術負責人向驗收專家組做項目驗收匯報,驗收通過后出具檢驗報告。
2.2 儀器設備
試驗區安排PC-6通用航空飛機和Trimble AX80機載LiDAR系統進行航空攝影,使用拓普康HiperSR型GPS連接就近的GNSS連續運行參考站測量地面高程控制點和檢查點,POS設備選用Applanix AP60。Trimble AX80機載LiDAR系統技術參數如表1所示。

表1 Trimble AX80技術參數
2.3 技術設計
根據試驗區要求,通遼攝區設計點密度為0.57個/m2,基準面高程為攝區最低點高程。
在AX80_Productivity_Version_09b.xlsx工具中,綜合考慮激光發射頻率、數據記錄模式、激光MTA zone以及點云密度和飛機性能,將相對航高設定為3 500 m。
航線按南北方向敷設,平行于攝區邊界線的首末航線一般敷設在攝區邊界線上或邊界線外,確保攝區邊界實際覆蓋超出半幅圖幅范圍,航向覆蓋超出攝區邊界線半幅圖幅范圍[9-10]。
在AX80_Productivity_Version_09b.xlsx工具中計算,確定試驗區的點云向重疊度為25%,航攝因子計算表如表2所示。
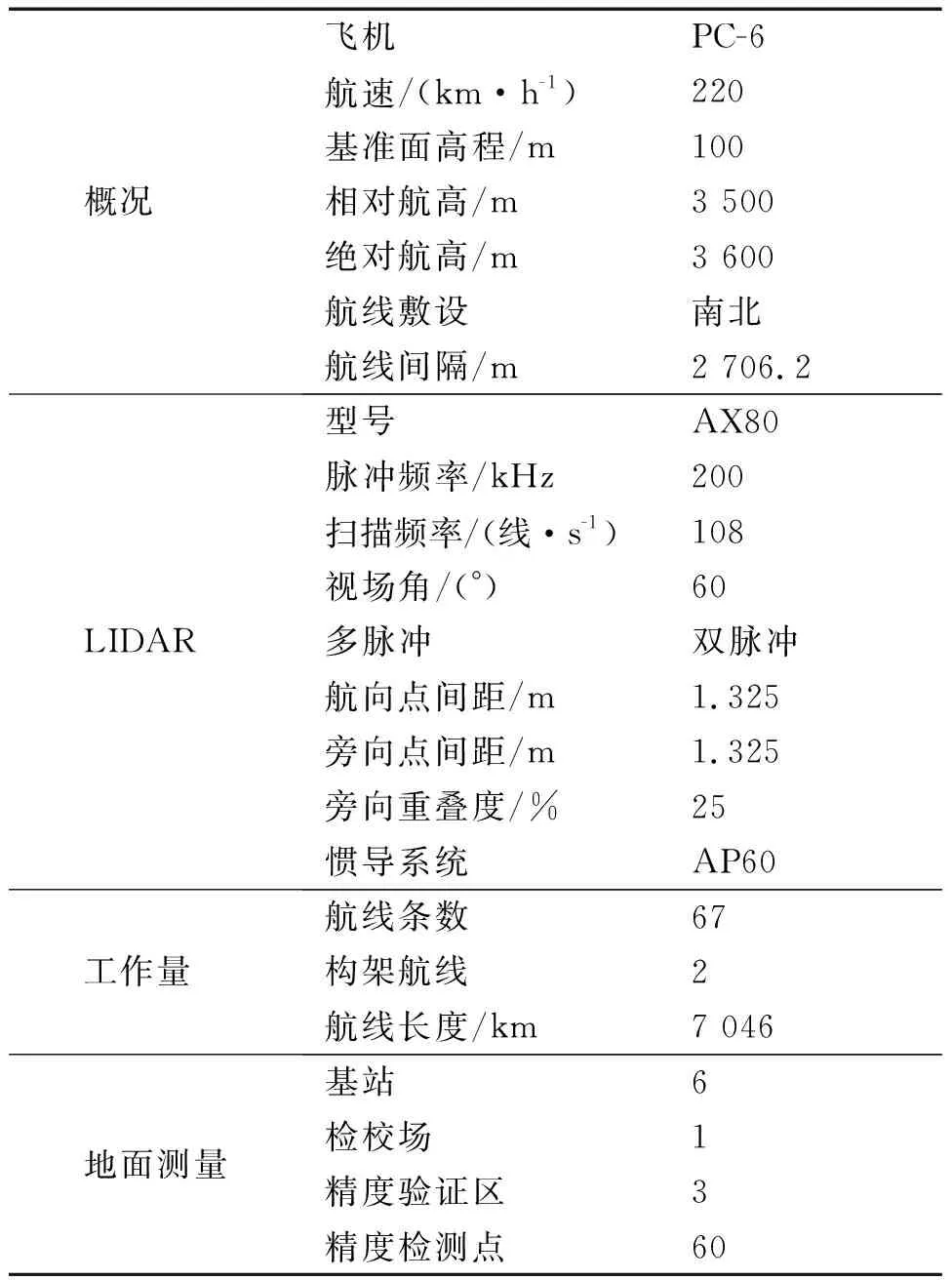
表2 航攝因子計算表
3 點云數據校正方法
3.1 試驗區數據問題分析
在數據處理過程中,出現部分航帶間點云數據高程差超限問題,且具有不規則性,導致航帶間點云拼接精度不能滿足相關要求,如圖2所示。
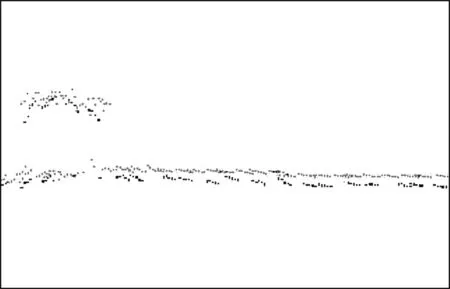
圖2 校正前的點云數據
出現的點云數據高程差超限問題,可能是由于DGPS定位誤差、姿態測量誤差以及安置角誤差(航向角誤差、俯仰角誤差和橫滾角誤差)引起的。機載LiDAR系統中,IMU與激光掃描儀緊密結合,安裝時已盡可能使IMU各軸和激光掃描儀系統各軸指向平行,但實際安裝完畢后,IMU各軸指向均與掃描儀系統各軸指向存在微小的角度差[11-13]。另外,在飛行作業過程中,氣象條件對飛行的干擾非常大,飛機在受到氣流而發生顛簸或逆風飛行時,可能會導致GPS定位偶然誤差或IMU累計誤差,都可能會造成點云精度的不規則性。各項誤差累計后,可能最終會導致部分航帶點云數據高程差超限。
3.2 航帶間點云校正方法
航帶匹配主要是利用航帶重疊區域內的地面點和建筑點云提取連接線,并進行最小二乘匹配,計算航線的改正值。
首先要進行點云分類,其目的是為了減小計算量并提高連接線生成的精度和可靠性。點云分類需要考慮以下幾點:
(1)植被應該盡量分離出來,植被區域通常存在多次回波,且地表結構不可靠;
(2)應分離出具備較好地表反射信號的地物,如平坦地面和傾斜屋頂等;
(3)分離出的地面點應均勻分布在空間中。
在機載LiDAR系統中,從點云數據中自動提取高精度的連接點比較困難,考慮到試驗區內點云數據相對精度較高,可以采用在航帶重疊區域內自動生成連接線的方法。
最后進行系統偏移計算,當相鄰航帶點云數據的高程存在差值時,通常會在Z方向上進行偏移校正,當相鄰航帶點云數據平面和高程都存在差值時,可同時進行Z方向和Roll、Pitch和Heading角度的偏移校正。在高程和平面聯合校正的情況下,連接線的生成需要注意多個方向較大密度的分布。校正后的點云數據如圖3所示。
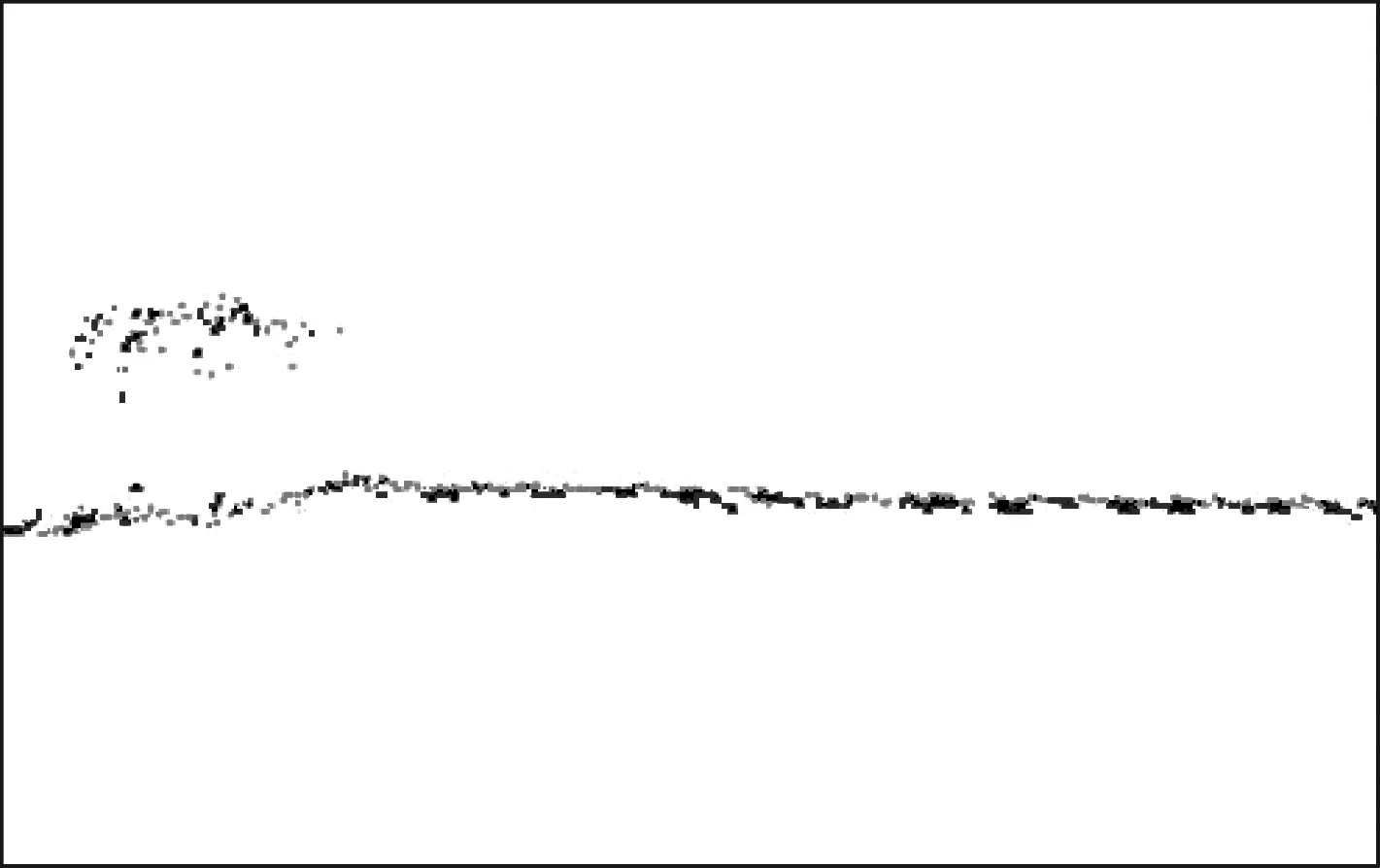
圖3 校正后的點云數據
4 精度分析
將外業高程精度檢測點導入校正后的點云數據中,進行點云高程精度檢測,可計算出點云誤差最大值為0.194 m,最小值為0.017 m,誤差平均值為0.090 m,高程中誤差為0.104 m,經過校正后的點云高程精度滿足相關技術要求,如表3所示。
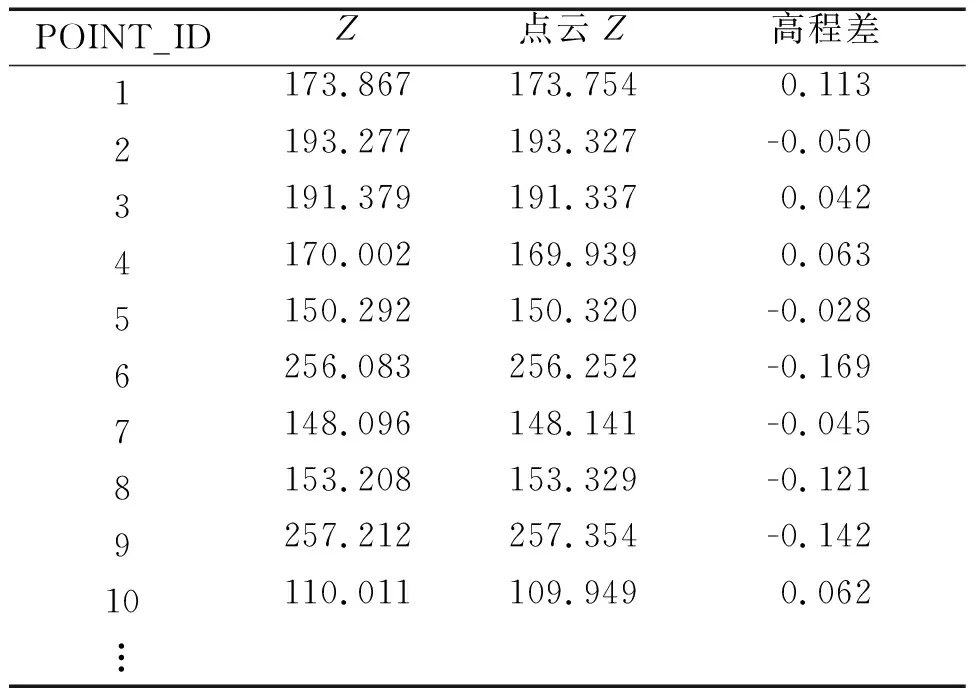
表3 點云高程精度檢測表 單位:m
5 結束語
本文以通遼攝區機載激光雷達點云數據為例,介紹了一種快速、高效解決部分航帶間點云高程差超限的校正方法,避免了由于數據精度問題造成的補飛或重飛,節約了時間和經濟成本,為解決類似問題提供了一種思路。但這種方法可能會存在一定人為的偶然誤差,不建議在整個攝區大面積使用。
點云數據為高精度的高程信息數據,主要用于生產1∶10 000比例尺高精度DEM,反衍等高線后經平滑處理,可用于輔助1∶10 000比例尺DLG生產,能較快填補內蒙古自治區1∶10 000比例尺無圖區的空白,是基礎測繪生產的重要數據來源,為經濟建設和高質量發展提供了數據保障。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
