低空遙感平臺攝影測量技術的探討
2014-11-13 06:31:30馬騰飛趙鳳輝
江西建材 2014年16期
■顧 慧,周 亦,馬騰飛,趙鳳輝
■1.吉林大學地球探測科學與技術學院,長春 130012;2.北京中色測繪院有限公司,北京 100012;3.有色金屬礦產地質調查中心測繪院北京 100012;4.譜尼測試科技股份有限公司,北京 100080
1 低空攝影測量技術簡介
低空攝影測量技術是指航空高度不超過千米,并以小型飛機、無人機或飛艇等作為平臺的攝影測量技術。該技術的顯著優點為獲取成果速度快、周期短、成本低、可靠性較強。尤其是在最近幾年里,無人機和無人飛艇獲得了快速的發展和完善,這為該技術的發展和應用提供了強有力的支撐。以無人飛艇為遙感平臺的低空攝影系統為例,它是以數字遙感設備作為任務載荷,并以相關數據信息快速處理系統為基礎支持的專用化遙感系統,此類系統不但安全性高、操作簡單方便,而且對場地條件的要求較低,設備便于安裝,可在低空和低速條件下穩定飛行,并針對地面建筑進行懸停航拍,這極大程度地確保了遙感影像的高分辨率,是目前攝影測量中最為實用的系統平臺之一。我國的一些研究機構,在該領域中進行了深入的研究,并取得了顯著的成果,相繼開發出了多種型號的無人飛艇等設備。
低空攝影測量中,比較重要的技術有以下幾種:
其一,遙感技術。大量的實踐證明,數碼相機拍攝到的影像要比模擬相機拍攝到的影像更加清晰,而且前者的種類較多,價格相對比較便宜,并且不需要進行掃描便可以獲得數字影像,大幅度縮短了成果的獲取周期,這使其被廣泛應用于航空攝影測量當中。
其二,姿態控制技術。想要獲取到更加清晰的影像就必須克服氣流、飛行器等因素對數碼相機的影響,換言之,需要有一個相對比較穩定的平臺,特別是對于飛艇和無人機等抗風能力弱、飛行穩定性差的飛行器,必須加裝三軸穩定平臺,以此來確保數碼相機的姿態穩定。
其三,影像處理技術。為確保影像的后處理工作能夠順利完整,需要影像實時傳輸與快速拼接軟件。同時,飛行器獲取到的航片存在傾角大、重疊度不均勻等問題,所以必須采用針對性較強的影像后處理技術。
2 低空遙感平臺攝影測量系統的設計
無人飛艇低空遙感平臺攝影測量系統主要是由兩個部分組成,一部分是系統硬件,另一部分是系統軟件。
2.1 系統硬件
該系統的硬件由空中飛艇和地面監控兩個部分組成,空中飛艇部分的主要設備包括氣囊、吊艙、發動機、GPS陀螺儀、自動駕駛設備、增穩平臺、數碼相機和攝影機;地面監控部分具體是由以下設備組成:便攜式計算機、手控設備、視頻終端以及電源,系統的整體結構如圖1所示。
GPS是飛艇的導航裝置,在自動駕駛的狀態下,飛艇會根據預先設置好的航行線路進行低空飛行,并以一定的距離和間隔時間進行拍照,借此來獲取地面的數碼影像;飛艇的起落主要是由地面監控部分負責,同時還對飛艇的自動駕駛進行監控。
2.2 系統軟件
該系統的軟件主要由以下幾個部分組成:飛艇航行線路規劃軟件、飛艇飛行監控軟件、平差解算軟件、正射影像制作與編輯軟件。除上述軟件之外,系統還包含以下功能模塊:工程管理、全自動匹配、影像預處理、控制點量測、DEM生成等等。
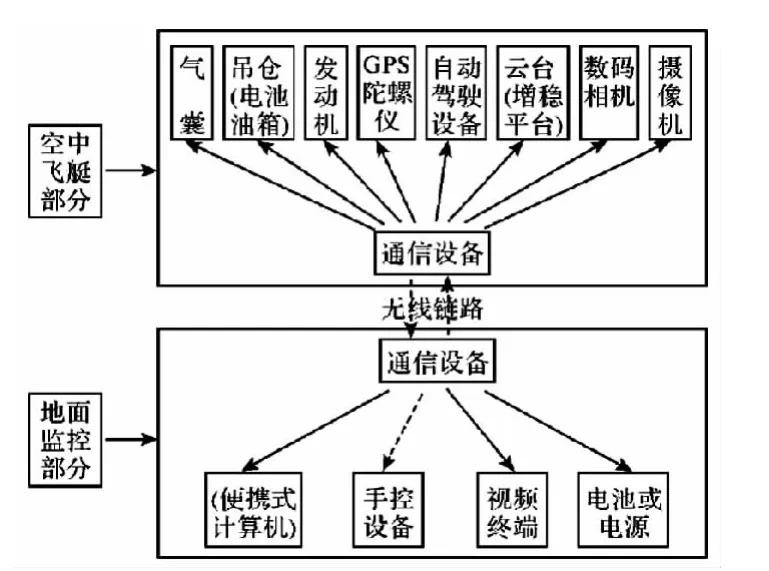
圖1 系統的硬件結構示意圖
3 低空遙感平臺攝影測量系統的應用實例
所選測量區域的地面高程約為50m左右,該測區內分布有大量的低山,山體的整體高度全部在170m以下,整個測區的范圍長度為8000m,成圖面積約為60 km2。下面運用上文中設計的低空遙感平臺攝影測量系統對該測區進行測量。
3.1 飛艇航行路線規劃
目前,數碼相機在測量領域內獲得了廣泛應用,這使得大重疊度的航攝測量成為主流趨勢,為攝影測量自動化目標的實現提供了可能。在本次測量中,決定對所測區域采用大重疊度航行路線設計,航行方向的重疊度設計為80%,旁向的重疊度設計為60%,地面的分辨率為0.2m。為了獲得更加清晰的航攝影像,在數碼相機上配備了14mm焦距鏡頭,相對飛行高度控制在350m左右,每張影像的攝影范圍為600×900m。該測區的常規航行線路為22條,構架航行線路為4條,飛艇實際飛行的線路為26條,總計獲取影像1804張。
3.2 選點及量測
為有效提高測量效率,在對飛艇航行線路進行規劃的過程中,需要合理選取控制點并進行量測。低空遙感攝影測量技術最為顯著的特點之一是分辨率高,為此,可以直接選取影像上較為明顯的地物點作為地面控制點,如路口交叉點、房屋拐角等等。依據我國現行的航攝測量作業規范標準的要求,并結合實際成圖需要,決定在該測區的設計航帶內每8條基線選取一個控制點,共計選取140個地面控制點,實地采用GPS-RTK測量155控制點。
3.3 工程管理與航攝影像預處理
飛艇根據預先規劃設計好的航行線路自動飛行,并對相關影像進行拍攝后,需要先對測區內的相關數據進行整理,主要包括數碼相機參數、影像數據信息以及工程參數等等。其中數碼相機的參數可以通過三維檢驗校正獲得,在數據預處理的過程中,主要是對航空拍攝到的影像進行主點糾偏和畸變糾正。由于實際拍攝中,受角度不同等因素的影響,使得在同一個區域內的相鄰影像當中存在色差,為確保測物內正射影像的色調一致,必須進行勻色處理,具體過程如下:從該測區拍攝到的影像當中選擇出一張具有代表性的影像,然后借助圖像處理軟件,對其色調進行調節,并以此作為基準影像,隨后,利用勻色模塊將基準影像和測區內的其它影像全部載入到軟件當中,并進行勻色處理。處理效果如圖2所示。
3.4 加密處理
由于飛艇在低空飛行的過程中,受到風力作用,會對攝影的效果造成一定程度的影響,雖然飛艇的自動駕駛系統能夠對
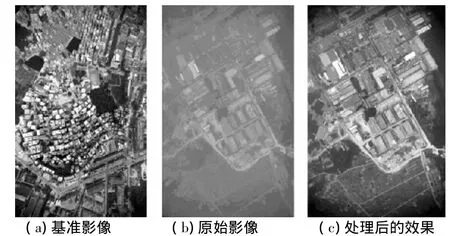
圖2 測區影像勻色處理后的效果
其飛行姿態進行實時調節,數碼相機的穩定云臺也可以確保相機處于相對固定的狀態,但飛艇在航線上行進時,其本身的姿態會發生不斷地變化,若是遇到強氣流,則會導致飛艇出現劇烈的變化,這樣很難確保數碼相機拍照時保持穩定的姿態,這樣一來,造成了獲得的影像姿態角超出測量規范標準的角度要求,從而導致匹配難度較大。為了解決該問題,決定在特征點匹配的過程中引入SIFT算子,并將其匹配結果作為初始值,然后利用最小二乘進行精確匹配,以此來確保匹配結果的穩定性和有效性。
3.5 平差結算與影像校正
首先,采用光束法將拍攝到的每張影像的外方位元素計算出來,然后再對大量影像點進行密集匹配,并將這些影像點的大地坐標計算出來,經過濾波處理之后,通過地面離散點規則網格化生成DEM;在對拍攝到的影像進行方位元素解算時,由于各種因素的影響,難免會出現偏差,這樣一來便會導致所生成的測區DEM出現偏差。因此可以采用系統中的正射糾偏模塊進行分塊校正,由此便可以獲得整個測量區域范圍的正射影像。
4 結論
綜上所述,低空遙感平臺攝影測量系統以其自身靈活、便捷、成本低等優點,在測繪領域內獲得了廣泛應用。雖然本文提出的系統也存在一些不足之處,但通過相應的措施可以有效彌補系統中的不足,通過對系統應用實例進行研究后發現,該系統能夠用于區域范圍的正射影像獲取,并且所得的影像可以滿足使用要求,這充分證明了該系統具有一定的推廣使用價值。在未來一段時期內,應當不斷加大對低空攝影測量技術的研究力度,并在現有的基礎上進行不斷改進和完善,使其能夠更好地為測繪地理信息工作服務。
[1]王小平,唐劍,鄭團結.微型無人數字航空攝影系統的設計與實踐[J].測繪技術裝備.2010(6).
[2]陳華剛,王昌翰.低空數字攝影系統在山地區域制作1∶500數字線劃圖的試驗研究[J].測繪與空間地理信息.2011(8).
[3]張博,王大華.一種對流層軟式飛艇設計體積估算方法的商榷[J].航空計算技術.2012(8).
[4]張小紅,李星星,郭斐.GPS單頻精密單點定位軟件實現與精度分析[J].武漢大學學報.2009(8).
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
家庭影院技術(2017年9期)2017-09-26 03:41:45
