顯微鏡平臺自動控制系統設計
2014-11-10 04:18:47康軍
科技資訊 2014年8期
康軍
摘 要:在顯微鏡應用領域中,具有自動控制功能的顯微鏡平臺發揮著越來越重要的作用。本文介紹了一種高性能的顯微鏡平臺控制系統,該系統基于ARM處理器LPC2146和運動控制芯片MCX314,使用高精度光柵作為位置檢測元件,通過PID算法實現閉環控制。其性能和可靠性達到了實際應用的要求,具有較高的實用價值。
關鍵詞:顯微鏡 LPC2146 MCX314
中圖分類號:TP273 文獻標識碼:A 文章編號:1672-3791(2014)03(b)-0009-02
光學顯微鏡是一種顯微目標成像、測量的儀器,廣泛應用于生物學、材料檢驗、電子元件性能檢測和分析等各個領域。隨著計算機技術和數字成像技術在顯微鏡領域的應用,人們對顯微鏡自動成像、自動化測量的要求越來越高。本文介紹了一種高性能的顯微鏡平臺自動控制系統,該系統通過RS232與計算機通訊,可在計算機控制下實現掃描拼接、三維重建掃描、自動聚焦等功能,大大降低了顯微鏡人工操作的勞動強度。
1 ARM處理器LPC2146
ARM處理器是目前廣泛采用的32位處理器,基于ARM技術的微處理器應用約占據了32位RISC微處理器75%以上的市場份額。顯微鏡平臺控制系統要求響應速度快、控制精度高,傳統的8位單片機已經難以滿足要求。本系統采用了32位ARM7處理器LPC2146作為控制系統的CPU,LPC2146具有32K SRAM和256K FLASH高速存儲器,USB2.0接口,多個UART、SPI、SSP和I2C總線接口,多個32位定時器、PWM、45個高速GPIO口以及多達9個外部中斷管腳,其硬件資源滿足顯微鏡平臺控制系統的要求。
2 電機運動控制
顯微鏡平臺控制系統由步進電機驅動,共有3個電機軸,控制顯微鏡載物臺水平方向(X、Y軸)和垂直方向(調焦Z軸),3軸可同時運行。電機驅動脈沖頻率最高為150 kHz,電機啟停有加減速控制,防止高速啟動丟步和急停時的震動,每軸可設置不同的加速度和速度。光柵位置檢測,以實現閉環控制,光柵精度±1 μm,分辨率0.1 μm。LCD顯示屏及按鍵,顯示相關信息并允許用戶通過按鍵手動操作顯微鏡平臺。控制系統可連接計算機工作,采用RS232通訊。
本系統采用運動控制芯片MCX314實現電機運動控制,電機運轉時不需要CPU干預,能夠保證電機運行更平穩,也使得CPU有更多時間處理其他任務。MCX314可控制4軸電機,通過命令、數據和狀態寄存器,可實現位置、速度、加速度等的運動控制和實時監控,輸出脈沖頻率達4MHz,每軸都有伺服反饋輸入端、4個輸入點和8個輸出點,并有2個32位的光柵位置計數器和狀態比較寄存器,可用于電機位置閉環控制。
3 電路設計
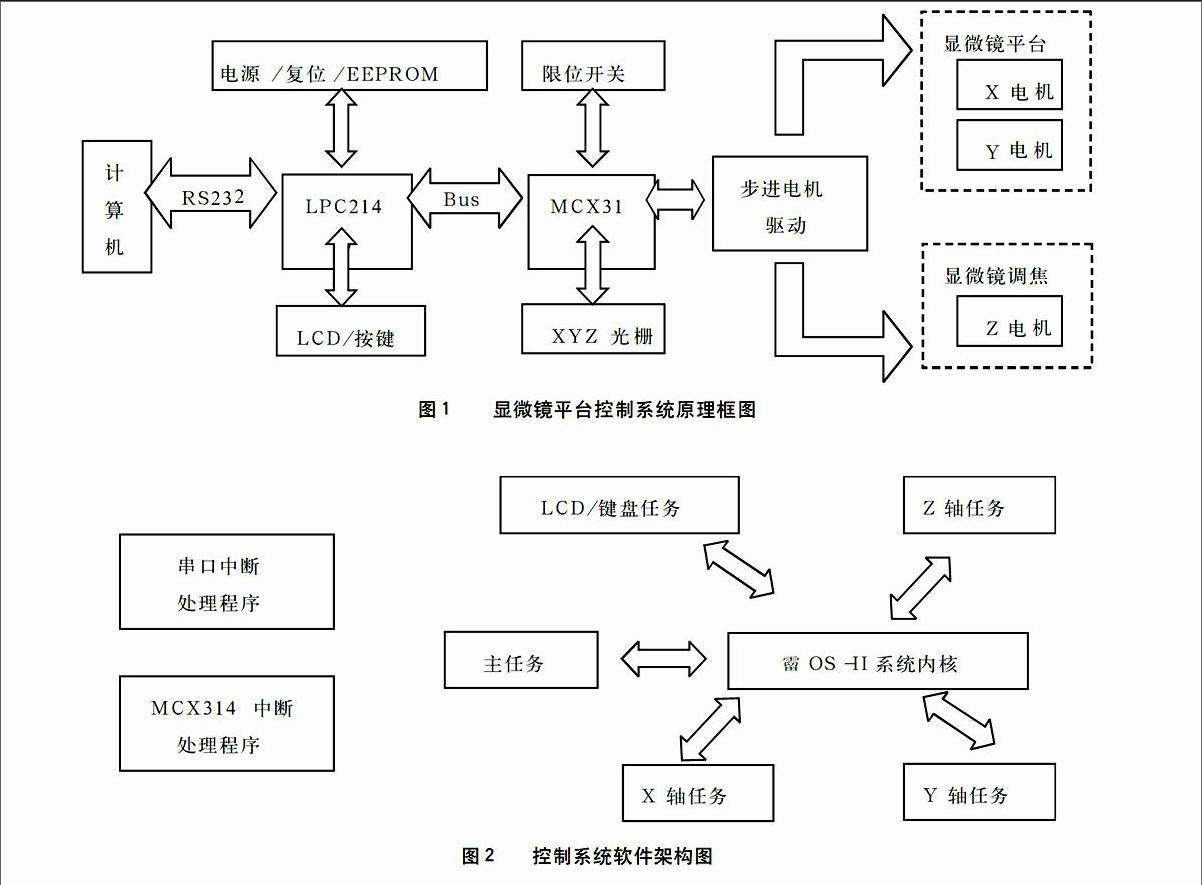
顯微鏡平臺控制系統電路主要由以下幾部分組成:CPU LPC2146、運動控制芯片MCX314、步進電機驅動電路、電源、復位和EEPROM電路、LCD和按鍵,原理框圖如圖1所示。
顯微鏡平臺控制系統可通過鍵盤或計算機(RS232)控制,可設定電機運動速度、方向、加速度等運動參數,可獲取當前電機運行狀態及其他相關信息。RS232串口通訊由LPC2146實現,采用中斷模式,串口有數據時引發中斷,LPC2146在中斷處理程序中讀出數據并存入緩沖區,主程序判斷緩沖區中接收到完整控制命令幀后,就對命令進行解析,并控制相應的電機執行動作。
LPC2146通過數據、地址總線設置MCX314命令和數據寄存器,MCX314按照設定的參數控制電機運轉,處理加減速、限位開關觸發檢測、光柵計數等操作,無需CPU管理,使CPU有更多時間處理其他任務。MCX314的中斷信號接至LPC2146外部中斷輸入腳,MCX314在電機運動狀態變化或出現異常時會觸發中斷,CPU響應此中斷就能夠及時獲取運行情況,并執行相應操作,使系統具有較高的響應速度。
步進電機驅動采用TB62209F驅動器,支持電流衰減設置、輸出使能控制、輸出力矩設置,最大驅動電流為1.8 A,支持16細分驅動。顯微鏡平臺采用0.9°步距角的步進電機,16細分后步距角約為0.056°。X、Y軸絲杠導程為1 mm,則細分后最小運動步長約為0.15μm。調焦Z軸絲杠導程為0.5 mm,細分后最小運動步長約為0.078μm。一般顯微鏡配置的最高倍物鏡為100X,其景深約為0.6μm,0.078μm最小步長滿足了顯微鏡系統調焦的要求。
4 控制程序設計
顯微鏡平臺控制系統程序基于μCOS-II系統,μCOS-II是具有任務優先級的搶占式多任務實時操作系統。本系統分為5個任務:主任務、LCD及鍵盤處理任務和3個電機控制任務(對應顯微鏡的3個驅動軸)。主任務具有最高任務優先級,能夠快速響應用戶控制命令,其主要功能是串口通訊管理及控制命令的解析。3個電機控制任務分別管理3個電機,相互獨立運行。顯微鏡對平臺定位精度有較高要求,尤其是調焦軸,由于高倍物鏡景深很短(0.6 μm),定位精度直接影響圖像清晰度,因此控制系統在電機控制任務中采用應用廣泛的PID控制算法,利用光柵進行位置檢測,實現閉環控制。PID參數可通過RS232命令設置調整,并存儲在EEPROM中,系統上電時自動讀出并應用。LCD及鍵盤處理任務負責人機界面交互,顯示相關狀態信息,檢測并執行用戶的按鍵操作。此外還有兩個中斷處理程序,負責管理串口中斷和MCX314中斷,及時接收串口命令并處理電機運動狀態的變化。控制系統軟件架構如圖2所示。
5 結語
根據顯微鏡應用的發展需求,設計了顯微鏡平臺自動控制系統。其硬件電路以ARM處理器LPC2146和運動控制芯片MCX314為核心,實現了電機控制、電機驅動、LCD顯示和鍵盤管理、光柵計數等功能。軟件基于μCOS-II嵌入式實時多任務操作系統,并通過PID算法結合光柵反饋實現顯微鏡平臺的閉環控制。通過實際測試,該系統穩定可靠,能夠較好滿足顯微鏡平臺的控制要求。以此控制系統為硬件平臺,配合不同的上位機軟件,可實現各種不同的應用,具有很高的實用價值。
參考文獻
[1] LPC214x User Manual[Z].NXP Semiconductors,2010.
[2] MCX314 User Manual[Z].NOVA electronics,2012.
[3] μC/OS-Ⅱ中文使用手冊[Z].endprint
