自主水下航行器模糊自校正航跡控制*
2014-11-10 07:10:04趙新華辛久元
網絡安全與數據管理 2014年8期
關鍵詞:方法
郝 陽 ,趙新華 ,辛久元
(1.中國人民解放軍91439部隊,遼寧 大連116041;2.哈爾濱工程大學 自動化學院,黑龍江 哈爾濱150001;3.中國人民解放軍65066部隊,遼寧 大連116100)
為了盡快到達目標位置并盡可能節省燃料,一般要求水下航行器 AUV(Autonomous Underwater Vehicle)以一定速度作直線航行,本文所提航跡控制就是指相鄰轉向節點之間直線航行階段的航跡保持。AUV作為一種典型的非線性控制對象,其控制具有兩個主要特點:一是控制對象的嚴重不確定性;二是水下海流擾動大且不可預知。應用傳統控制方法時需要得到AUV在不同工作條件下的精確數學模型,相比傳統控制方法,模糊控制不依賴于對象的數學模型,可以適應AUV控制的需要。近年來,國內外研究人員將模糊控制應用于水下航行器并取得了豐碩的成果。參考文獻[1]中的AUV修改學習實時T-S模糊控制器的模糊模型并通過結合一個模糊目標進行拓展,提高了控制精度和適應性;參考文獻[2]為AUV水平面運動提出了一種新的分層模糊/李雅普諾夫控制方法;參考文獻[3]設計了一種簡單有效的深潛救生艇模糊控制器;參考文獻[4]給出了使用模糊控制器的AUV模糊模型和數學模型的數值仿真結果。本文采用模糊控制方法,一不依賴其數學模型,不受其工作條件限制;二為獲得更好的控制效果并克服海流擾動的影響,引入模糊增益調節方法作進一步的優化。最后通過對比仿真驗證了該方法的控制效果。
1 AUV水平面運動數學模型
AUV六自由度運動通常可以分解為垂直面運動和水平面運動,本文只研究AUV在水平面內的航跡控制。假定AUV在垂直面內受到良好的定深控制,且忽略橫搖和縱搖運動對水平面運動的影響,則AUV水平面運動學方程為[5]:

其中 u、v、r分別為AUV在運動坐標系下的縱蕩速度、橫蕩速度、首搖角速度;Ψ為首搖角;ξ、ζ分別為AUV在固定坐標系下的位置坐標。該運動學方程也可以看作由運動坐標系向固定坐標系的坐標變換方程。
忽略縱蕩、橫搖和縱搖運動,AUV水平面動力學方程為[5]:
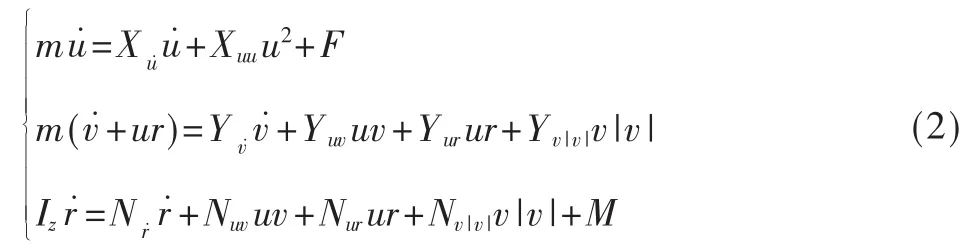
其中 m為 AUV的質量;I為轉動慣量;X、Y、N為水動力系數[6];F為AUV的軸向推進力,取期望縱蕩速度為u=2 m/s,容易得到軸向運動受力平衡后的推進力F=6.48 N。本文不考慮縱蕩速度變化的影響,令推進力恒定;M為AUV在垂直舵面與推進器聯合作用下產生的首搖轉矩,即控制量。
將恒定推進力和魚雷型水下機器人REMU100的有關參數[5]代入式(2),得到:
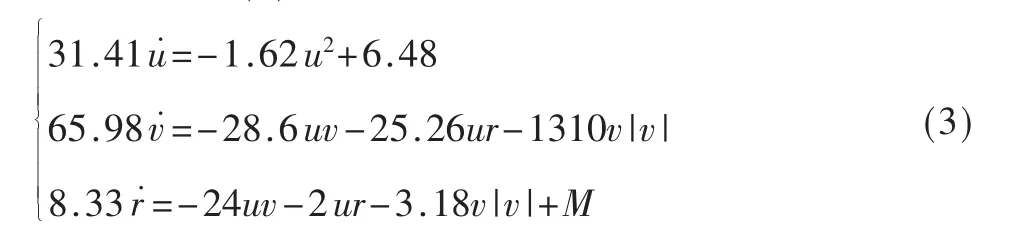
由于模糊控制不依賴于被控對象的數學模型,該模型只用于Matlab/Simulink仿真[7]。
2 控制方法及其實現
設 AUV實時位置坐標為(x(t),y(t)),其計劃航跡的下一個轉向節點坐標為(xd,yd),則此時AUV距該節點的距離以及駛向該節點所需的期望航向可由以下公式計算得到:

這里應注意:使用式(5)時需要判別象限。
基于模糊增益調節的模糊自校正AUV航跡控制方法的原理框圖如圖1所示。
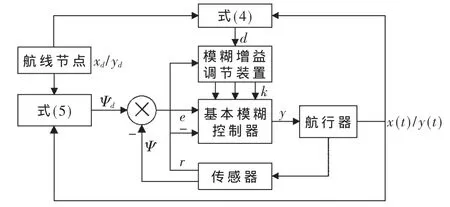
圖1 模糊自校正AUV航跡控制原理框圖
該控制方法包括 1個具有固定量化因子 Ke、Kr和Ky的基本模糊控制器和3個模糊增益調節裝置,該調整裝置也是一種可以改變基本模糊控制器輸入輸出量化因子的模糊控制器,它們的輸出即比例因子ke、kr和ky,與固定量化因子相乘,獲得新的量化因子 Keke、Krkr和Kyky是可調節的。
2.1 基本模糊控制器
基本模糊控制器有兩個輸入量:航向誤差e和偏航率r,其輸出y為作用于航行器的控制轉矩M。其輸入輸出關系如表1所示的模糊規則定義。
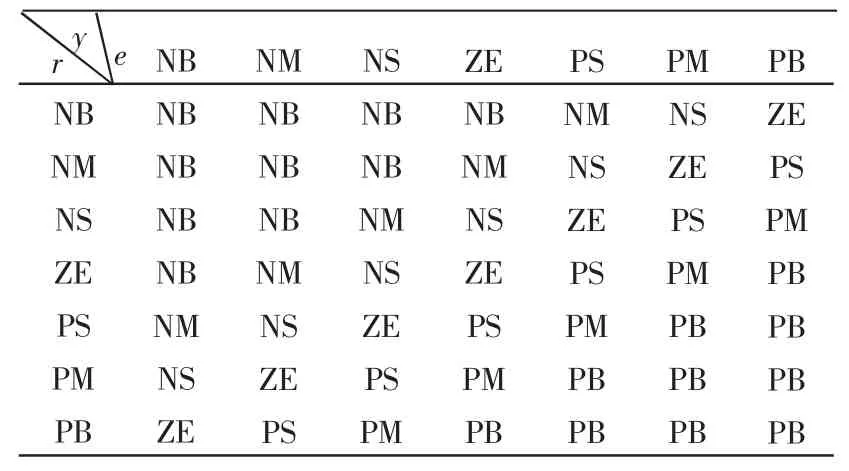
表1 基本模糊控制器規則庫
表1中模糊語言變量為:NB:負大;NM:負中;NS:負小;ZE:零;PS:正小;PM:正中;PB:正大。 采用取大-取小近似推理和模糊蘊含規則實現輸入量的模糊化;采用面積中心法實現輸出量的清晰化[8]。其輸入輸出變量的隸屬函數形式相同,如圖2所示。
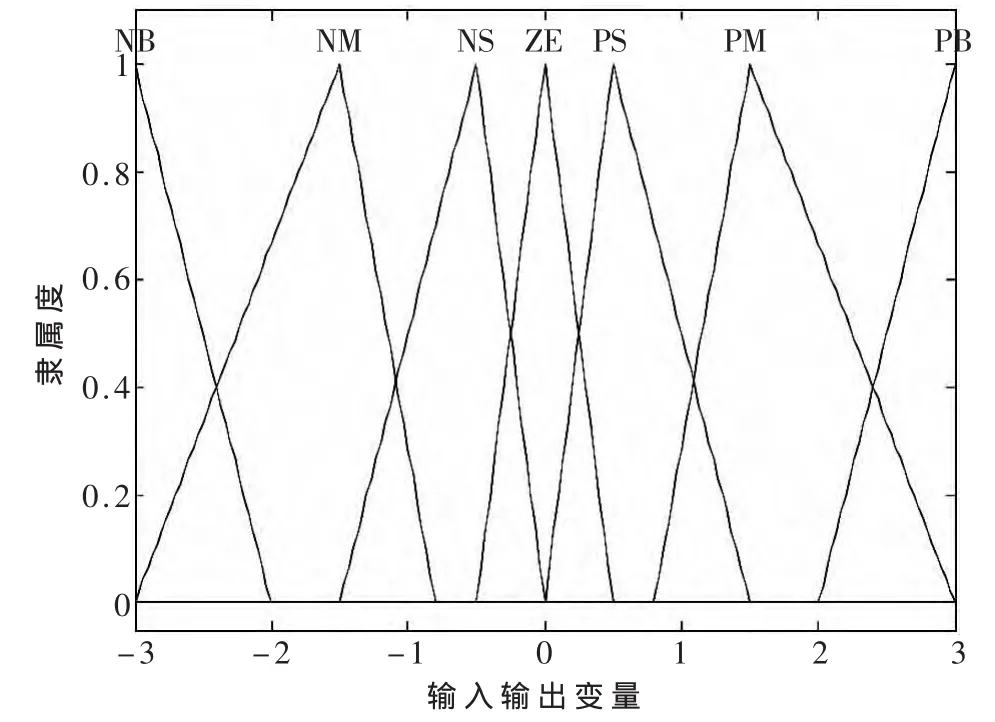
圖2 基本模糊控制器輸入輸出變量隸屬度函數
2.2 模糊增益調節裝置
為克服海流擾動影響并獲得更好的控制效果,引入該模糊增益調節裝置,即對基本模糊控制器量化因子的模糊優化方法。該方法也是一種馬丹尼型模糊控制器,有兩個控制輸入量:距離d和偏航角Ψ以及一個輸出量:增益k。其完整控制規則定義如表2所示。
表2中模糊語言變量為:ZE:零;NE:負;PE:正。 這組規則同時適用于 ke、kr和 ky。 模糊增益調節裝置采用取大-取小近似推理和模糊蘊含規則實現輸入量的模糊化;采用面積中心法實現輸出量的清晰化[8]。其輸入變量距離d和偏航角Ψ以及輸出變量增益k的隸屬度函數分別如圖3~圖5所示。
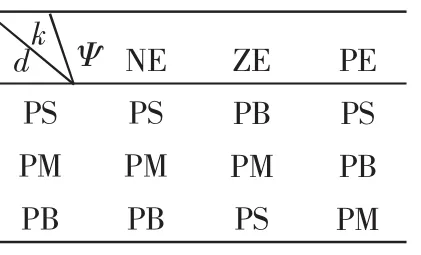
表2 模糊增益調節裝置規則集
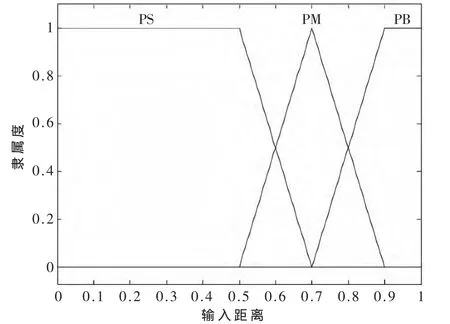
圖3 輸入變量距離d隸屬度函數
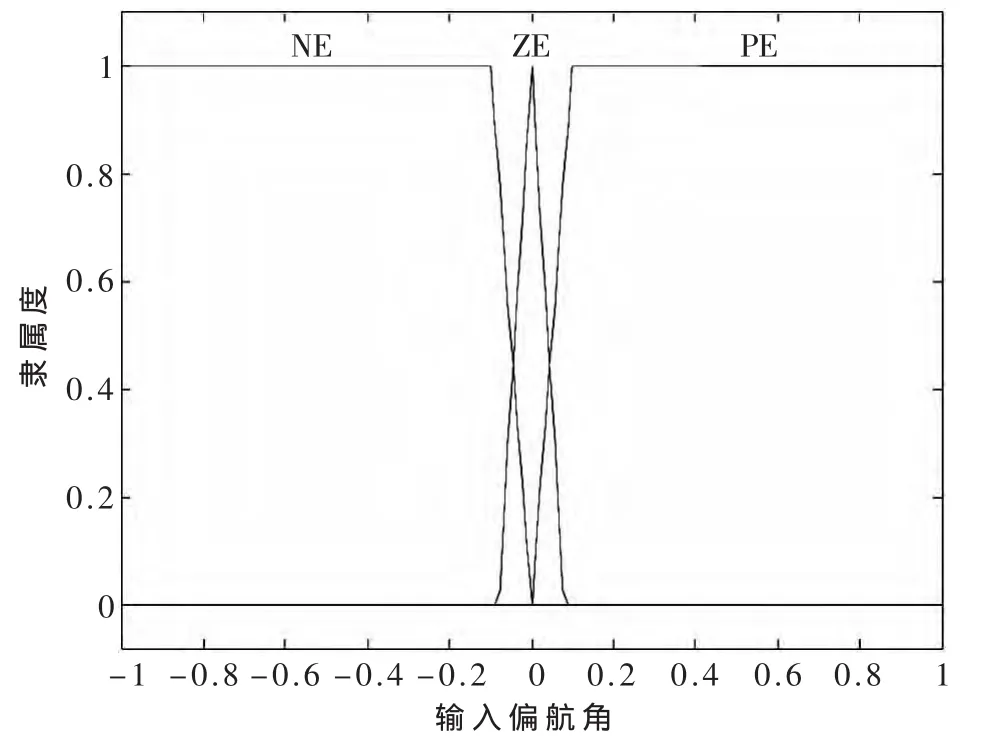
圖4 輸入變量偏航角Ψ隸屬度函數
3 仿真結果與分析
為更好地說明模糊自校正航跡控制方法的優勢,這里給出該模糊自校正控制與基本模糊控制的仿真結果,并進行比較,仿真條件統一設定為在垂直于AUV航向的海流擾動作用下,沿預定航跡航行600 m,仿真時間為310 s。圖6所示為基本模糊控制器和模糊自校正控制器的仿真軌跡比較圖。
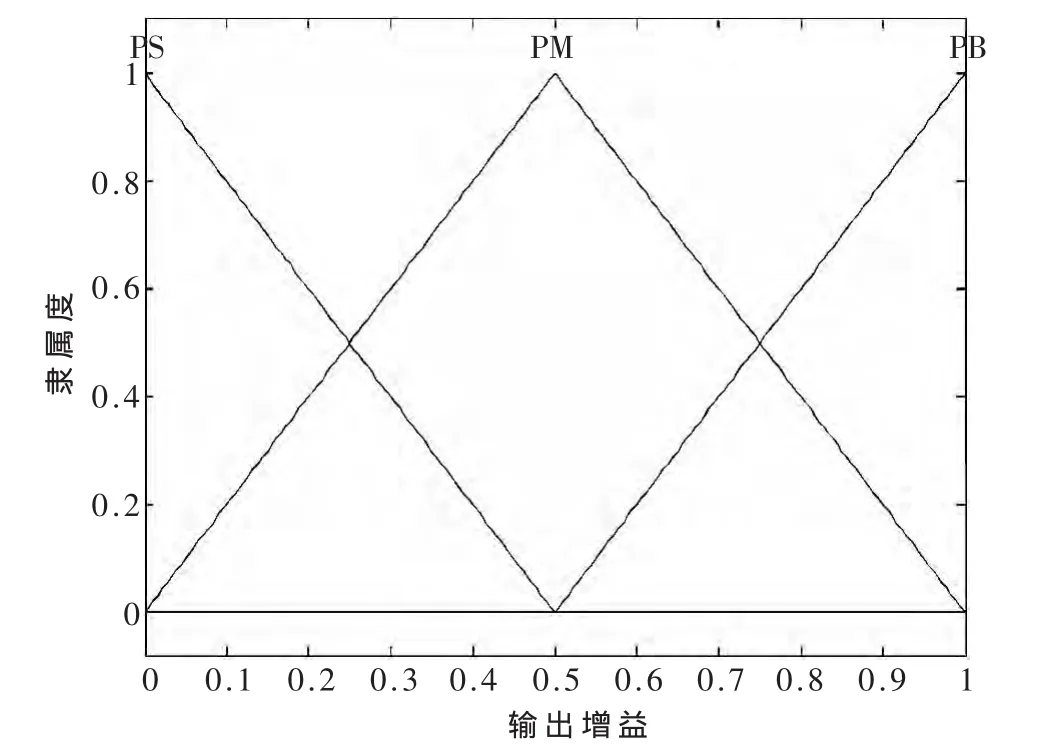
圖5 輸出變量增益k隸屬度函數

圖6 仿真軌跡比較圖
海流擾動在仿真開始20 s后加入。由圖6中可以看出,在相同條件下,基本模糊控制方法偏離目標航跡的最大距離為18 m,且航行軌跡不夠平滑;而模糊自校正自動駕駛儀偏離目標航跡的最大距離為15 m,且航行軌跡非常平滑。仿真結束時,二者都能夠使AUV基本達到目標航跡的轉向節點。仿真結果顯示,在海流干擾條件下模糊自校正控制器和基本模糊控制器都能控制AUV實時調整航向駛向目標航跡的轉向節點以實現航跡保持;但模糊自校正控制器相對于基本模糊控制器對海流擾動的適應性更強且具有更好的控制效果。
本文在一種基本AUV航跡模糊控制方法的基礎上,引入模糊增益調節方法對其量化因子進行實時優化,提出了一種模糊自校正AUV航跡控制方法,并對兩者進行了比較。在海流擾動的作用下,基本AUV航跡模糊控制方法的控制效果并不理想,而模糊自校正AUV航跡控制方法具有更好的控制效果,特別是對海流擾動具有更強的適應性。結果表明,應用該模糊自校正控制方法為AUV設計航跡控制器是完全可行的。
[1]Wang Fang,Xu Yuru,Wan Lei,et al.Modified learning of T-S fuzzy neural network control for autonomous underwater vehicles[C].Proceedings of 2009 International Conference on Information Technology and Computer Science.IEEE Press,361-365.
[2]FRANCESCO M.RAIMONDI,MAURIZIO MELLUSO.Hierarchical fuzzy/lyapunov control for horizontal plane trajectory tracking of underactuated AUV[C].Proceedings of IEEE International Symposium on Industrial Electronics.IEEE Press,2010:1875-1882.
[3]AMJAD M,ISHAQUE K,ABDULLAH S S,et al.An alternative approach to design a fuzzy logic controller for an autonomous underwater vehicle[C].Proceedings of 2010 IEEE Conference on Cybernetics and Intelligent Systems.IEEE Press,195-200.
[4]HASSANEIN O,ANAVATTI S G,RAY T.Fuzzy modeling and control for autonomous underwater vehicle[C].Proceedings of the 5th International Conference on Automation,Robotics and Applications.IEEE Press,2011.169-174.
[5]蘇玉民,曹建,徐鋒,等.魚雷形水下機器人非線性航跡跟蹤控制[J].上海交通大學學報,2012,46(6):977-983.
[6]金鴻章,姚緒梁.船舶控制原理[M].哈爾濱:哈爾濱工程大學出版社,2001:1-13.
[7]薛定宇.控制系統計算機輔助設計-MATLAB語言與應用(第 2版)[M].北京:清華大學出版社,2006:183-236.
[8]石辛民,郝整清.模糊控制及其MATLAB仿真[M].北京:清華大學出版社,2008:11-51.
猜你喜歡
中老年保健(2021年9期)2021-08-24 03:52:04
河北畫報(2021年2期)2021-05-25 02:07:46
中學生數理化(高中版.高考理化)(2020年2期)2020-04-21 05:33:04
兒童繪本(2020年5期)2020-04-07 17:46:30
兒童故事畫報(2019年5期)2019-05-26 14:26:14
Coco薇(2016年2期)2016-03-22 02:42:52
山東青年(2016年1期)2016-02-28 14:25:23
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56