自整定PID在鍋爐汽包水位控制中的仿真應用與分析
2014-11-06 01:55:44李寧
應用能源技術 2014年1期
關鍵詞:方法
李 寧
( 寶鋼集團八鋼公司,烏魯木齊 830000)
0 引 言
火電機組具有強耦合、非線性、大慣性、參數時變和不確定因素的典型復雜熱工系統,它具有多個控制量和被控量,具有上述的復雜控制目標和相應的復雜控制任務[1]。在火電機組仿真建模方面,不僅進行理論研究建模(J.P.McDonald,1971 和 K.J.Astrom,1988)[2],也開始了電廠控制對象在線辨識方法研究(如P.K.Chawdhry and B.W.Hogg,1989)[3]。常規的機組控制方案結合前饋補償、串級等控制策略,采用基于PID線形控制算法的多個SISO反饋控制回路組成的分散控制結構,目前仍在大多數機組中獲得廣泛應用,但無法保證長時期正常投入運行,只能用來維持生產過程的平穩運行,復雜工況需要運行人員大量的手工操作和監督控制,機組運行參數偏離經濟指標較大,造成大量能量損失,增加了設備故障率,嚴重影響機組的經濟效益和安全可靠運行[4]。
為了解決上述控制方法對復雜的鍋爐控制系統的不適應性,系統先進和智能控制理論及計算機控制技術開始得到日益廣泛的應用,極大地促進了應用非常規設計方法對電廠機組控制系統的重新考察。為了解決常規機組控制系統應用中存在的問題,適應電網綜合自動化發展提出越來越度高的性能要求,人們對電廠控制對象及其控制方法進行了廣泛深入的研究,提出了許多新的控制策略和設計方法,并在實際應用中取得了較好的試驗效果。其中主要有專家控制、模糊控制、神經控制、遺傳算法、模型預測控制、自適應或自整定控制方法,以及混合型智能控制方法等[5]。
1 自整定PID控制
1.1 PID參數自整定的概念和發展
PID參數自整定概念中應包括參數自動整定(auto-tuning)和參數在線自校正(self-tuning on-line)。具有自動整定功能的控制器,能通過按鍵就由控制器自身來完成控制參數的整定,不需要人工干預,它既可用于簡單系統投運,也可用于復雜系統預整定。運用自動整定的方法與人工整定法相比,無論是在時間節省方面還是在整定精度上都得以大幅度提高,這同時也就增進了經濟效益。早在20世紀70年代,Astrom等人首先提出了自校正調節器,以周期性地辨識過程模型參數為基礎,并和以最小方差為控制性能指標的控制律結合起來,在每一采樣周期內根據被控過程特性的變化,自動計算出一組新的控制器參數。20世紀80年代,Foxboro公司發表了它的EXACT自校正控制器,使用模式識別技術了解被控過程特性的變化,然后使用專家系統方法去確定適當的控制器參數。這是一種基于啟發式規則推理的自校正技術。20世紀90年代,神經網絡的概念開始應用于自校正領域[6-7]。
具有自動整定功能和具有在線自校正功能的控制器被統稱為自整定控制器。一般而言,如果過程的動態特性是固定的,則可以選用固定參數的控制器,控制器參數的整定由自動整定完成。對動態特性時變的過程,控制器的參數應具有在線自校正的能力,以補償過程時變。
1.2 PID參數自整定方法
從目前的資料和應用情況來看,PID參數自整定的方法主要歸結為三大類:一是辨識方法;二是在線模式識別方法;三是基于知識推理方法。
(1)辨識法
在過去的五十多年中,辨識方法取得了很大的發展,在參數自整定的方法中占主導地位,這與控制理論的發展和人們對控制器的認識有關。獲取模型是實現控制的前提,這種觀念在五十年代,乃至現在都為廣大的控制工作者所肯定。因此,設計控制器必須知道控制對象的數學模型,辨識是有力的工具,這是參數整定最根本的出發點。根據辨識方法和內容不同,可以分為下面兩類:一是辨識過程對象的數學模型(傳遞函數),一是辨識閉環系統的臨界增益和臨界周期或多點頻率特性。
(2)模式辨識法
模式識別的思想根據實際響應波形,抽取出一些能表征系統的特征值,由此來判斷系統的動態特性,進而調整控制器參數,即將波形分析與人工智能結合起來,開辟了參數整定的一條新路,實際應用中獲得了很大的成功。例如Foxboro公司推出的EXACT控制器及其分散控制系統I/A Series中的PIDE功能模塊,采用模式識別的參數整定方法。根據波形可以抽取不同的特征描述量,從不同的角度進行PID控制器的參數的整定。該方法的特點是不用對系統模型進行辨識,節省時間,而且能夠適應過程的變化,對于非線性變結構的系統有效。但是,該方法是模仿人的調節行為,即在波形產生以后再作修改,相當于糾正“錯誤”的過程,而對于實際過程控中這種“錯誤”是不允許的。因此,該方法在設定參數初值時有一定的危險性。
(3)基于知識推理方法
基于知識推理的PID自整定控制,對模型要求較少,是借助于控制器輸出和過程輸出變量的觀測值來表征的動態特性,而不依賴于一個居間的過程模型,從而具有易于執行且魯棒性較強的特點。它能綜合采用專家經驗進行整定,其中啟發式規則還可將過程動特性和干擾特性區別開來,并從保持良好的閉環響應特性出發,確定出所需的校正參數。而且基于產生式規則實現控制的系統,其程序設計以邏輯型語句為主,它和以代數型語句為主的辨識法相比較,需要的計算時間較少,所以用于處理較快的運行過程。
但這類方法也存在一些不足,方法的指導原則仍然停留在較弱的理論基礎上,它需要豐富的控制知識,其性能的優劣取決于開發者對控制回路參數整定的經驗,以及對反饋控制理論的理解程度。另外,如果采用模式識別的方法,當專家系統不具備判斷某種模式的知識時,整定后的控制會發散。
總之,由于常規PID控制器不具有在線整定參數的能力,使其不能滿足在不同e、ec下系統對PID參數自整定的要求,從而影響到控制效果的進一步提高。本設計將模糊控制與常規 PID控制相結合,利用模糊推理的思想,根據不同e、ec對PID的參數Kp、Ki、Kd進行在線整定,這就模糊自適應整定PID控制器。
2 自整定PID在汽包水位單沖量控制中的應用
根據鍋爐控制系統對汽包水位的控制性能的要求,結合總體設計思想,分別對鍋爐汽包水位在啟動過程中的單沖量控制和正常負載工作時的三沖量控制進行分析和設計,并應用Matlab/Simulink進行仿真分析,其具體實現步驟如下。
2.1 單沖量控制系統結構
單沖量給水自動調節系統如圖1所示,它是連續給水自動調節中最簡單、最基本的一種模式。水位測量信號經過變送器送到水位調節器,調節器根據水位測量值與給定值的偏差去控制給水調節閥,從而改變給水量保持鍋爐水位在允許范圍內。因為只采用水位一個信號作調節器的信號,故叫做單沖量水位自動調節。其中Gw(s)=

圖1 單沖量控制系統結構圖
2.2 單沖量控制系統仿真結構圖
對圖1的系統利用Matlab/Simulink設計系統仿真結構圖,其結構如圖2,其中subsystem為封裝的自整定PID控制器,其結構如圖3所示,PID Controller為常規的參數可調的PID控制器,封裝結構如圖4所示,Manual Switch為手動切換開關,用于在自整定控制器與常規控制器之間切換,step為水位的輸入控制信號,step1和step2分別為蒸汽輸出量和給水輸出量的模擬輸入信號。執行機構和閥門的特性系數分別為10和2,用Gain7模擬的比例給水調節閥。
其中被控對象的傳遞函數分別為:

分別為給水流量和蒸汽流量的傳遞函數。
2.3 單沖量控制性能分析與對比
汽包水位自整定PID模糊控制與常規PID控制仿真比較因上述控制方案僅限于在鍋爐啟動階段,即蒸汽發生端的負荷小于20%,暫時將蒸汽擾動和給水擾動的信號忽略。輸入信號(step)設置為1,蒸汽流量擾動信號(step1)和給水擾動信號(step2)均設為0,設定仿真時間為1000 s,仿真算法位定步長的四階龍格—庫塔方法,仿真步長為0.5 s。設置Kp、Ki和Kd的參數,運行仿真器,觀察結果。其控制性能如圖5所示。其中(1)為自整定PID模糊控制器的控制仿真曲線,(2)為常規PID控制的仿真曲線。可見,相對于常規PID,自整定PID不僅縮短了系統的過渡時間,同時也減小了水位輸出的超調量,自整定控制器參數整定的曲線如圖6、圖7和圖8所示。
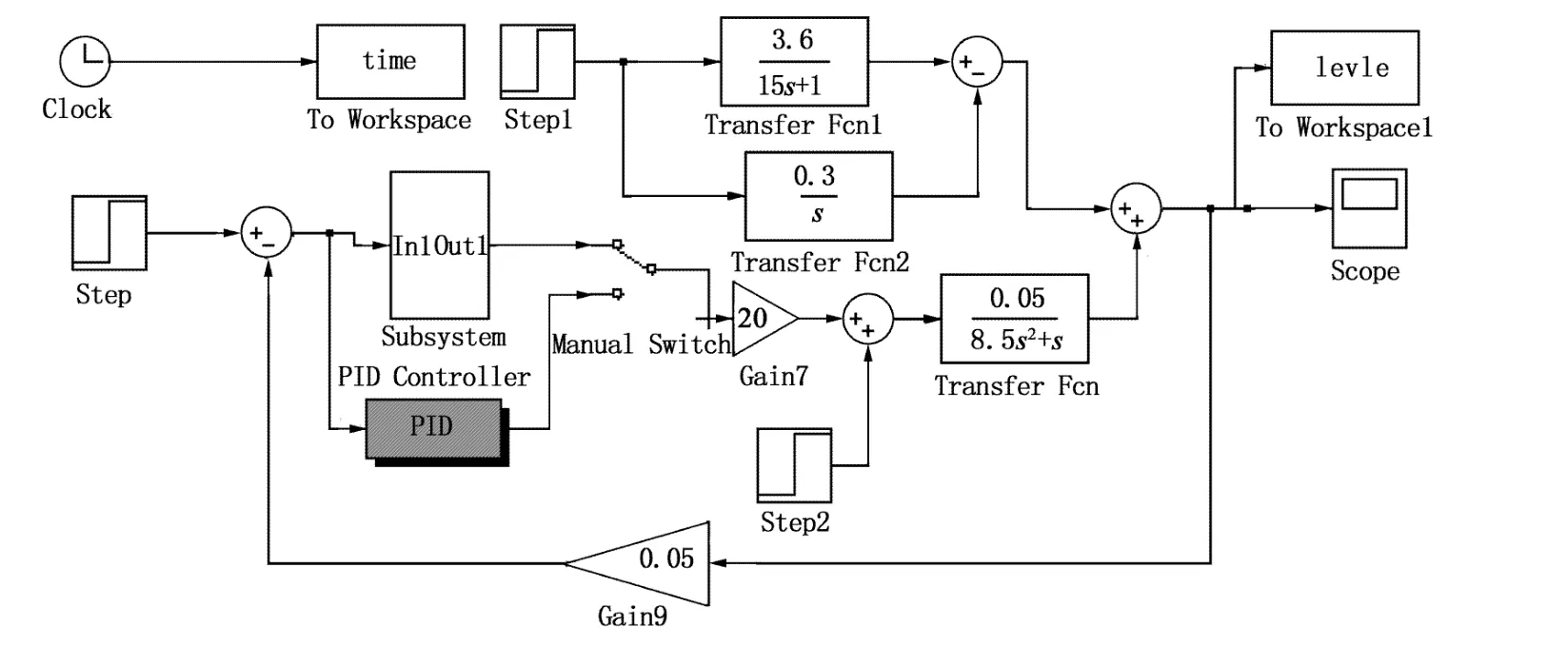
圖2 汽包水位單沖量自整定仿真結構圖
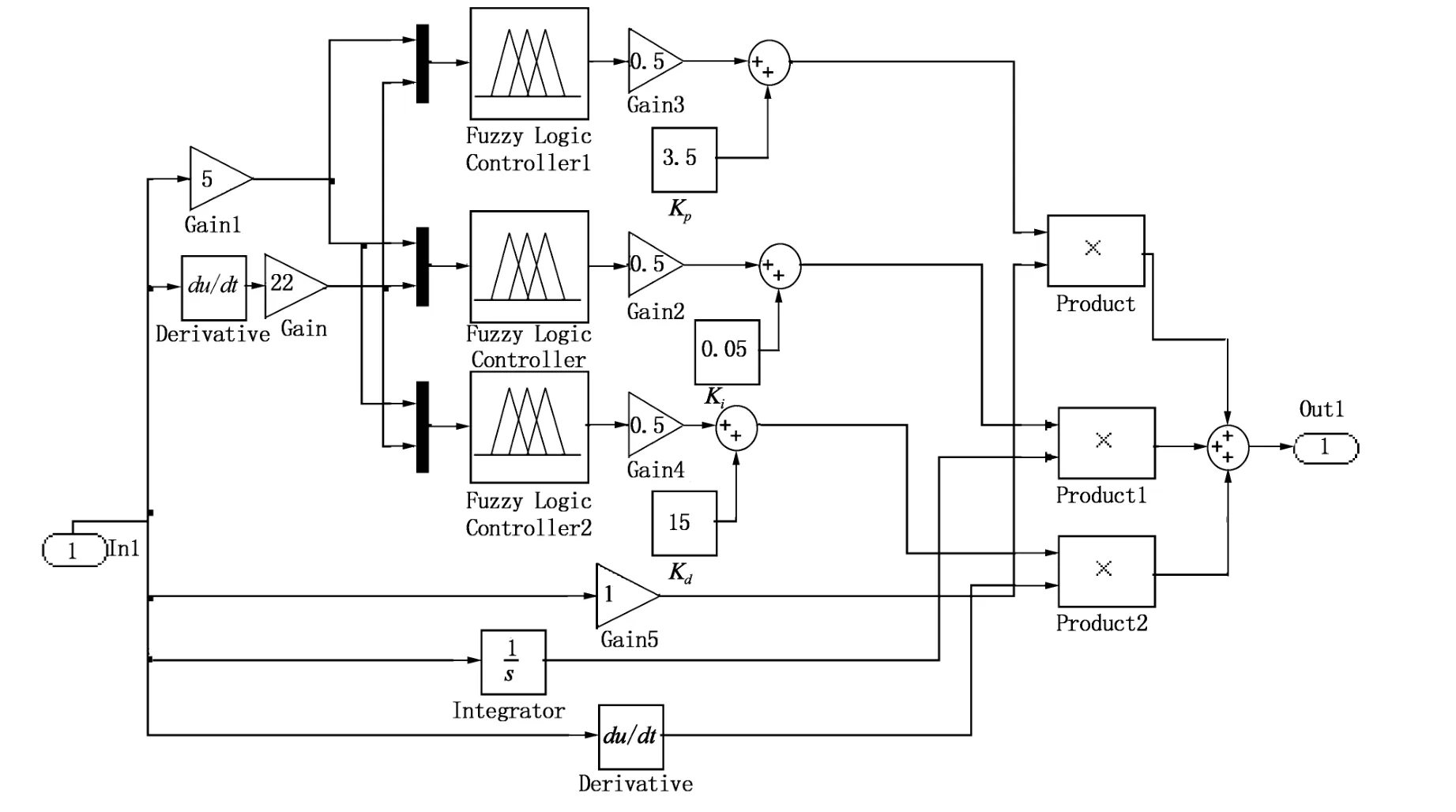
圖3 自整定控制器結構圖
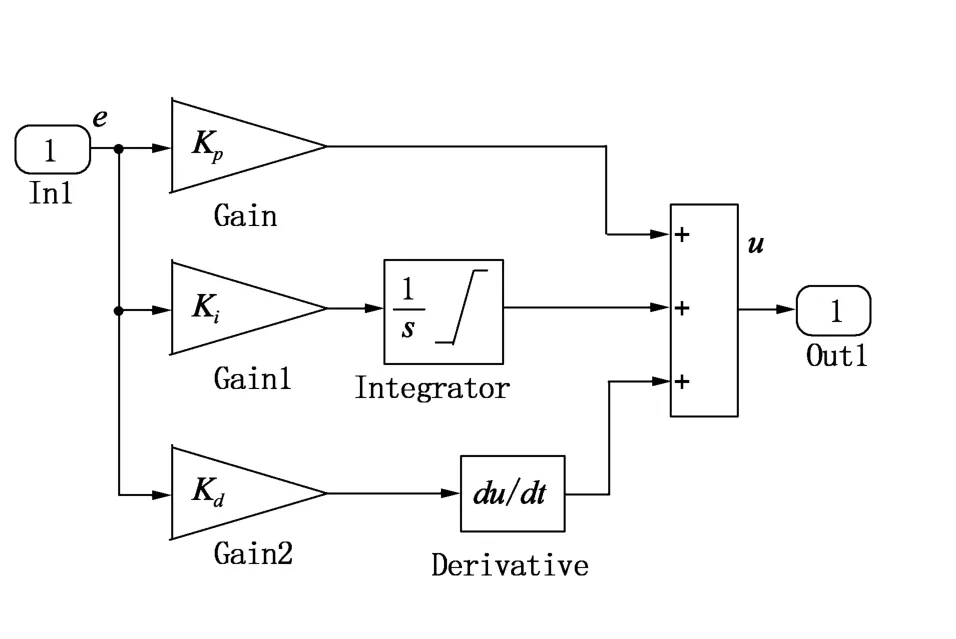
圖4 常規PID控制器結構圖
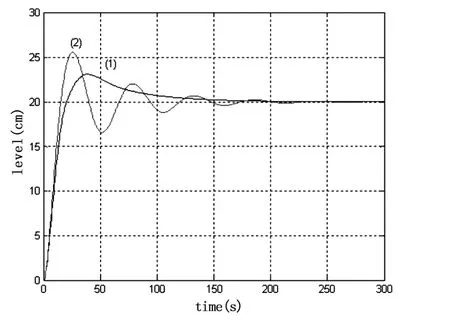
圖5 汽包水位自整定PID模糊控制與常規PID控制仿真曲線
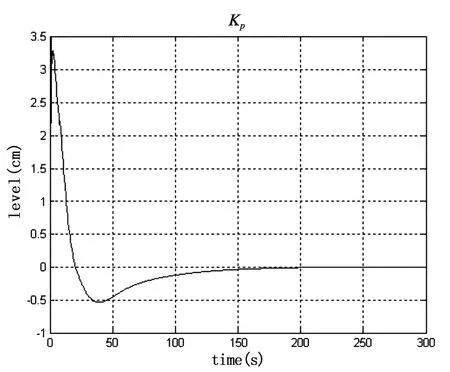
圖6 Kp參數整定曲線
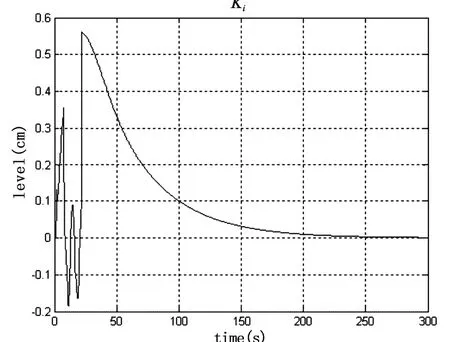
圖7 Ki參數整定曲線

圖8 Kd參數整定曲線
通過觀察可以知道,在參數的動態整定過程中,自整定控制器根據模糊規則,實現了對控制參數的動態調整,不斷按照規則使控制性能達到最優。
(1)汽包水位在給水擾動作用時兩種控制方式仿真比較
在各參數均不變的前提下,給系統在t=500 s時加入給水流量外擾動信號 (Step2=5 t/h),此時汽包水位在蒸汽流量擾動下自整定PID模糊控制系統與常規PID控制系統的動態響應曲線如圖9所示。
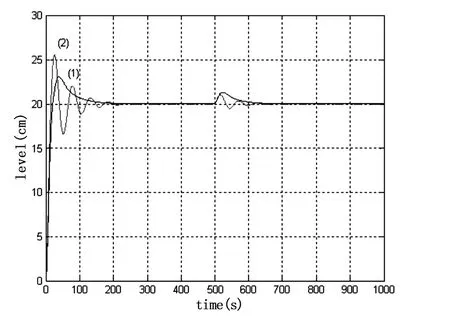
圖9 汽包水位在給水擾動作用時兩種控制方式仿真曲線
(2)汽包水位在蒸汽流量擾動作用時兩種控制方式仿真的比較
在其他各參數均不變的前提下,給系統在t=500 s時加入蒸汽流量外擾動信號(Step1=7 t/h),此時汽包水位在蒸汽流量擾動下自整定PID模糊控制系統與常規PID控制系統的動態響應曲線如圖10所示。其中(1)為自整定PID模糊控制器的控制仿真曲線,(2)為常規PID控制的仿真曲線。
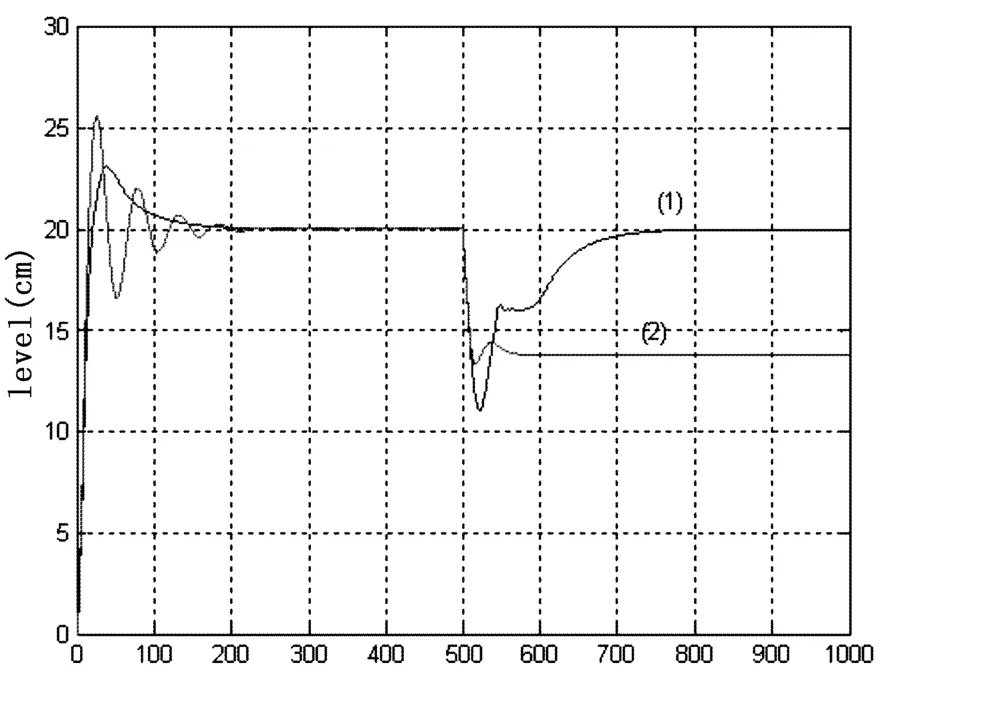
圖10 汽包水位在蒸汽流量擾動作用時兩種控制方式仿真曲線
通過上述分析,可以知道,相比常規PID控制器,模糊自整定PID在穩定性、動態特性、抗擾性等方面,都有很大的優越性,非常適合汽包水位這樣的動態系統。
但是,從單沖量控制器在大范圍的蒸汽流量的擾動下的控制特性的分析可以知道,由于存在“虛假水位”的問題,而單沖量控制器對于具有非最小相位特性的蒸汽流量擾動,沒有足夠的抑制作用。所以,一旦發生流量在大范圍內變動,將引起給水調節閥的誤動作,致使汽包水位激烈地上下波動,嚴重影響設備的壽命和安全。從圖10中還可以看出,在蒸汽擾動作用下,常規PID控制器在大負荷的作用下,將不能回到原有的水位高度,使控制器失穩,造成嚴重的后果,而自整定控制器雖然能使水位最終回到初始位置,但調整時間過長,并且水位激烈的上下振動,并不適宜鍋爐這樣的系統要求。
因此若采用單回路PID控制方式控制汽包水位,而不采取一定措施,則在出現“虛假水位”時,控制系統將會減少汽包進水流量,致使汽包中水量進一步減少。顯然,單回路PID控制方式是難以適應汽包水位控制的,為了克服“虛假水位”現象,必須引進更多的控制變量,采用三沖量控制算法,并將模糊控制算法應用于上述控制系統中。
3 結論
在總結模糊自整定PID的控制方案的基礎上,通過對余熱鍋爐汽包水位在各種工作條件下的性能的仿真分析,充分證明了模糊自整定PID控制方案的有效性和可行性。在對于單沖量和三沖量兩種不同的控制方案的作用下,模糊自整定控制器同樣可以獲得良好的控制效果,尤其對于時變的控制系統,其優越性更加顯著。同時,通過對模糊自整定控制器穩定性的分析,可以知道,該模糊控制器對于所研究的對象而言,是穩定而有效的。
針對對象參數未知的控制對象,模糊自整定PID控制有其獨特的優點,可以根據實時的系統響應做出不同的參數調整。目前在溫度、水位等系統中的應用比較廣泛。但是,由于規則的有限性和控制器設計人員的主觀性,模糊自整定控制器也有其不可以避免的局限性,一旦對象響應中出現規則沒有的情況,將使控制性能極大下降。作為一種剛剛興起的先進智能控制方案,模糊自整定PID有著廣泛的應用空間和前景,其性能也有待進一步的提高。
[1]Mcdonald J P,Kwatny H G.A nonlinear model for reheat boiler-turbine-generator system[J].Part 1-general description and evaluation,Part 2-development.Proc.JACC,1971:219 -236.
[2]Astrom K J,Hagglund T,Hang C C.Automatic tuning and adaptation for PID controller - a survey[J].Control Engineering Practice,1993:9 -23.
[3]Chawdhry P K,Price B H.The controllability of steam output,pressure and water level in drum boilers[J].Proc I Mech Eng,1997:75 -84.
[4]董紅生.PID控制器的參數自動整定方法的研究[D].蘭州:蘭州理工大學,2002:5 -6.
[5]孫林軍,智能PID控制研究[D].杭州:浙江工業大學,2003,5:2 -11.
[1]夏 紅.PID自整定方法綜述[J].浙江科技學院學報,2003(15)4:237-240.
猜你喜歡
中老年保健(2021年9期)2021-08-24 03:52:04
河北畫報(2021年2期)2021-05-25 02:07:46
中學生數理化(高中版.高考理化)(2020年2期)2020-04-21 05:33:04
兒童繪本(2020年5期)2020-04-07 17:46:30
兒童故事畫報(2019年5期)2019-05-26 14:26:14
Coco薇(2016年2期)2016-03-22 02:42:52
山東青年(2016年1期)2016-02-28 14:25:23
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
