復合控制導彈的模糊控制算法及實現
2014-10-25 05:54:04史震馬文橋張玉芳林強
哈爾濱工程大學學報 2014年2期
史震,馬文橋,張玉芳,林強
(1.哈爾濱工程大學自動化學院,黑龍江哈爾濱150001;2.空軍航空大學航空理論系,吉林長春130022)
隨著科學技術的發展,反艦導彈以及各類搭載精確制導武器的戰斗機、無人機的速度與機動性越來越高,各種戰術彈道導彈的威脅也越來越大,給艦載區域防空系統帶來很大的壓力。傳統的艦載防空導彈只采用氣動力控制,依靠舵面偏轉產生氣動力矩控制導彈,在發射初始段或高空飛行時,由于動壓不足舵面效率較低,導致過載響應速度較慢,限制了導彈的有效攔截范圍和精度。為解決這一問題,美國、歐洲等國已經在艦艇上裝備了新型艦載直接力/氣動力復合控制導彈[1]。
根據側噴發動機安裝位置,直接力/氣動力復合控制導彈可分為軌控式、姿控式2種。軌控式的側噴發動機安裝在質心附近,側向力作用于質心直接產生法向過載,可以迅速提高導彈的響應速度并增加可用過載,如俄羅斯的9M96E2導彈。姿控式利用裝在導彈質心前的姿控發動機產生控制力矩,迅速改變彈體姿態角產生氣動力而提高導彈的響應速度,廣泛地應用于大氣層內攔截彈中,如美國的ERINT-1攔截彈[2]。側噴發動機根據燃料不同可分為液體燃料發動機(如德國TLVS)與固體燃料發動機(如俄羅斯9M96E);根據推力特性可分為連續推力型(如英國Aster-15/30)與離散脈沖推力型(如美國ERINT-1)。針對不同的側噴發動機形式,需要采用不同的控制算法及實現方案。
針對姿控式直接力/氣動力復合控制導彈的復合控制問題,國內外學者作了不少研究工作,文獻[3]采用動態控制分配方法,將直接力作用點在導彈質心前后2種情況分別做了驗證;文獻[4]采用二階滑模控制方法設計了復合控制導彈的控制系統;文獻[5]利用變結構控制進行了復合控制系統設計,討論了復合控制系統的實現問題;文獻[6]運用模糊控制的無限最大逼近特性設計了脈沖推力器點火控制器;文獻[7]設計了基于參考模型的模糊自適應控制分配策略,并采用進化策略對參數進行優化。總體來看,這些研究取得了一定的效果,但基本上都是基于簡化模型,沒有充分考慮噴流干擾帶來的模型不確定性,對模型的精確性要求較高,并且大多停留在理論探索階段,離工程實用還有一定距離。
針對當前研究存在的問題,本文首先建立了姿控式復合控制導彈的數學模型,以俯仰通道為例,提出了一種基于模糊控制理論的控制系統設計方法,包括點火算法和控制分配算法,然后考慮算法的工程實現問題,分別設計了有限時間收斂微分器、自旋穩定彈PWPF點火實現方案、一種改進的旋轉彈疊加點火算法實現方案。最后在某特征點對導彈進行了仿真驗證。
1 復合控制導彈數學模型
1.1 俯仰通道簡化模型
導彈采用類似ERINT-1攔截彈的姿控式布局,如圖1所示,采用軸對稱設計,彈尾配置2對全動式氣動舵,姿控發動機安裝于質心前端,攔截末段開啟,產生直接側向力來提供控制力矩。
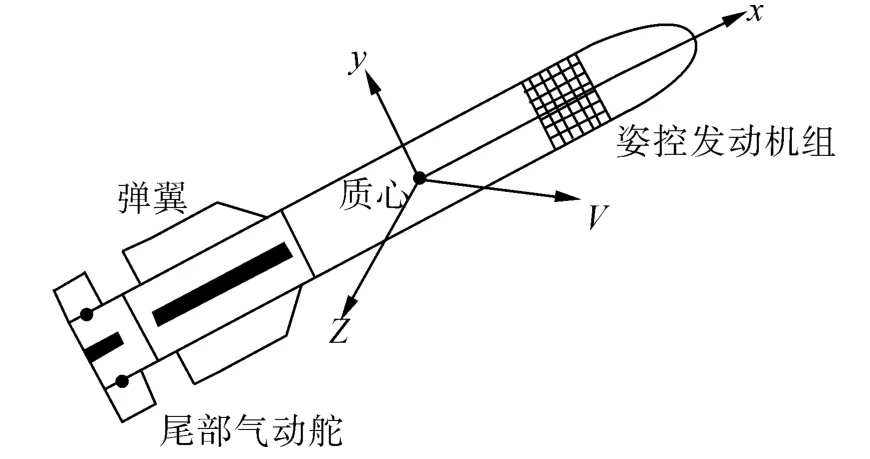
圖1 導彈氣動布局Fig.1 Aerodynam ic configuration of missile
當姿控發動機點火時,側向噴流將與外部流場發生非常復雜的干擾效應,流場內會出現分離激波、馬赫盤和分離渦等復雜的物理現象,稱為噴流干擾效應(JI)。噴流干擾非常復雜,難以建立精確的數學模型,但控制系統設計時關注的是噴流干擾產生的附加干擾力和力矩的影響,可以采用推力放大因子KF來描述噴流干擾產生的影響,KF定義如下:
式中:Fi為噴流引起的干擾力,Fj為姿控發動機的靜態推力。KF除了與導彈及姿控發動機配置參數有關外,還與與攻角、馬赫數、飛行高度、氣流扭角等變量有關,工程上多采用風洞試驗和計算流體力學(CFD)的方法獲得。在短周期模態下,導彈馬赫數、高度變化不大,可將噴流干擾因子近似視為攻角α的連續函數。
考慮導彈末制導段縱向平面的短周期運動情況,即令 β、γ、γV、ψ、ψV、ωx、ωy≈ 0,由于末制導段較短,因此可將導彈的質量和速度視為常值,忽略外形不對稱及升降舵下洗延遲產生的附加力矩,并考慮噴流干擾的影響,建立導彈俯仰通道短周期數學模型[8]:
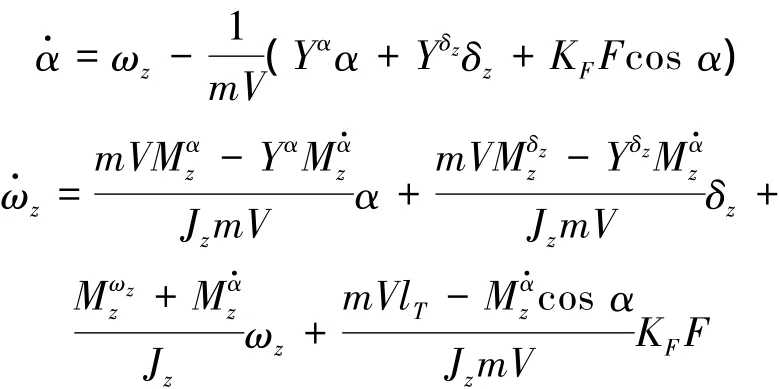
式中:m為導彈質量,V為速度,δz為俯仰舵偏角,α為攻角,F為彈體坐標系下姿控發動機標稱推力,Jz為導彈繞z軸的轉動慣量,ωz為導彈繞z軸的轉動角速度,lT為姿控發動機到質心的距離,Yα、Yδz、Mδzz 、、、等為相關氣動參數。
1.2 導彈控制方案
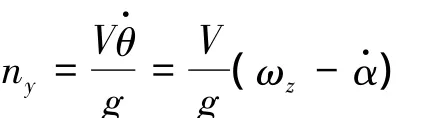
高機動防空導彈多采用過載控制,自動駕駛儀跟蹤制導系統輸出的過載指令。在彈體坐標系下導彈法向過載表示為
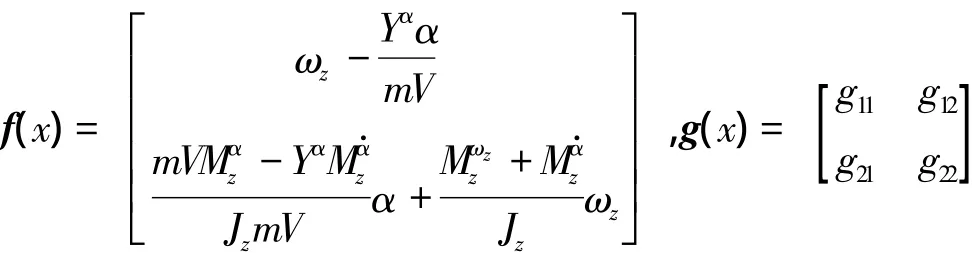
取狀態變量為x1=α,x2=ωz,控制量為u1=δz,u2=F,輸出變量為ny,將方程(2)、(3)寫成仿射非線性形式:
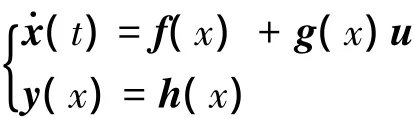
式中:
控制系統設計任務是在參數不確定和噴流干擾的綜合影響下,設計合理的控制量u1,u2滿足系統性能指標,同時保證系統的穩定。氣動力u1和直接力u2屬于2種性質完全不同的控制量,同時設計存在較大困難,考慮將系統分為直接力子系統和氣動力子系統分別設計。由于氣動力控制已經有比較成熟的算法,本文主要對直接力子系統的點火進行研究;同時為避免2個子系統之間產生耦合,導致發動機反復點火或舵偏角高頻震蕩,本文將設計控制分配算法對二者的控制權限進行實時分配。
導彈的復合控制系統總體結構如圖2所示。
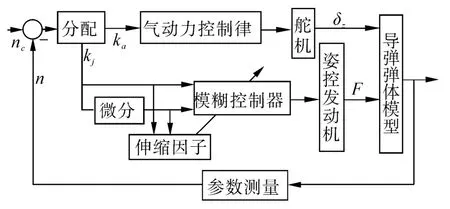
圖2 復合控制示意圖Fig.2 Compound control schematic
2 控制系統設計
大氣層內復合控制導彈具有多個執行機構,飛行參數變化劇烈,是一個非線性、不確定、強耦合的系統,傳統的控制系統設計算法嚴重依賴系統的精確數學模型,而模糊控制不依賴精確的數學模型,具有更強的魯棒性。由于考慮到算法復雜性,模糊控制規則數不可能過多,導致控制精度較低,為提高控制精度,又不帶來過多的計算開銷,發展出了變論域模糊控制方法[9]。
2.1 變論域自適應控制基本原理
設Xi=[-Ei,Ei]是模糊控制器i個輸入變量xi(i=1,2...n)的論域,Z=[-U,U]是輸出變量z的論域,設A={Aij}是論域Xi上的一個模糊劃分,B={Bj}是論域Z上的一個模糊劃分,則模糊邏輯系統模糊推理規則可表示為

因此常規模糊控制系統可以表示成一個n元插值函數:

變論域模糊控制方法是指在模糊規則數目和形式不變的前提下,通過設計合適的論域變換因子,使論域范圍隨著輸入變量的變化自適應調整,達到精確控制的效果,如圖3所示。
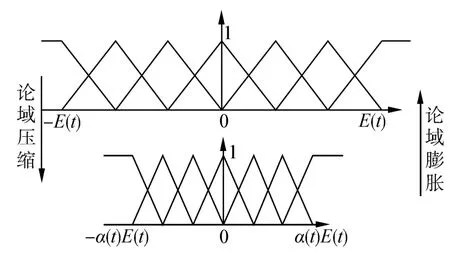
圖3 論域的變化Fig.3 Universe variation
變化后的論域可以表示為
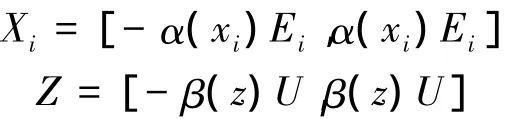
式中:α(xi),β(z)為輸入、輸出論域的伸縮因子。
變論域模糊控制系統可以表示成:

論域收縮相當于增加了規則數,越接近期望控制點,控制器的檔級越小,因此在提高控制精度的同時而又不會增加過多的計算開銷。在變論域模糊控制理論中,伸縮因子須滿足對偶性、避零性、單調性、協調性和正規性等要求。
2.2 模糊點火算法
以俯仰通道為例進行設計,選擇雙輸入單輸出結構的模糊控制器,輸入量分別為俯仰通道過載跟蹤誤差en與誤差的變化en',輸出量為姿控發動機連續推力F。
兼顧控制精度和算法復雜度,定義en,en'與F的模糊集均為 {NB,NM,NS,ZE,PS,PM,PB}。參考國外幾種已服役的先進復合控制導彈(如ERINT-1、9M96E、Aster等)的過載響應能力及所設計導彈性能指標,結合典型目標的運動特性,選取en,en'與F的論域分別為[-E,E],[-Ec,Ec],[-F,F]。
采用圖3所示的具有對稱形式的三角型隸屬度函數,各個模糊子集在論域上均勻分布。這種隸屬度函數具有形式簡單、計算效率高的特點,適合復合控制導彈這種需要快速響應的系統。考慮到快速跟蹤、減小超調量、節約發動機燃料,建立如表1所示的模糊規則表。
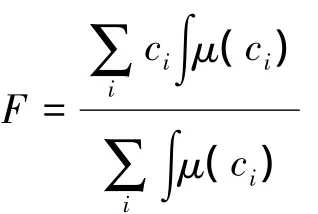
為得到較平滑的輸出以保持導彈姿態穩定,采用重心法解模糊,即取隸屬度函數曲線與橫坐標圍成面積的重心作為模糊推理的最終輸出值:
同理,偏航通道采用類似的模糊控制算法跟蹤該通道的過載指令。
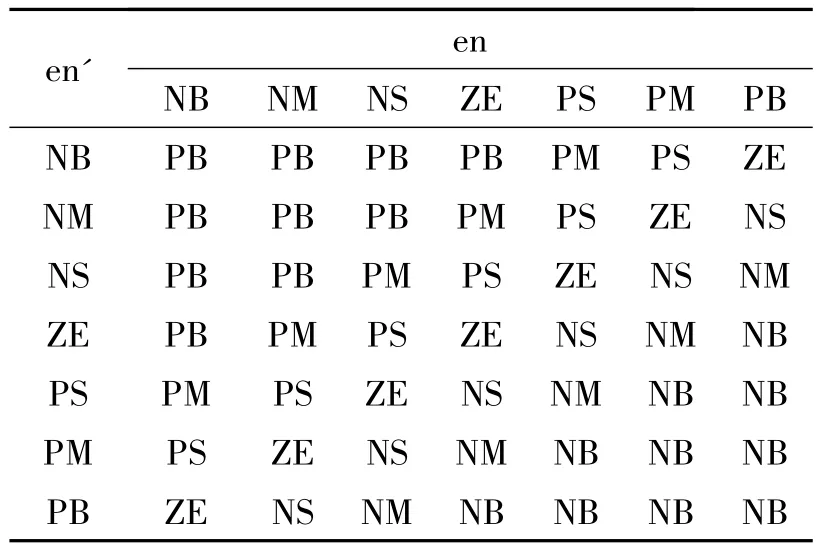
表1 模糊控制規則表Table 1 Fuzzy control rule
2.3 論域伸縮因子選取
目前變論域模糊控制的伸縮因子還沒有統一選法,為提高控制系統的品質,應綜合考慮誤差en以及誤差變化率en'的影響。以en的論域伸縮因子為例說明,α(en)與dα(en)/d t應滿足:當誤差較大時,只需粗略控制,伸縮因子無需快速變化,此時α(en)應接近1且dα(en)/d t較小;如果誤差E較小時,需要精確控制,伸縮因子需快速變小,此時α(en)應較小但dα(en)/d t較大。因此本文選擇如下的指數函數作為伸縮因子:

式中:k∈(0,1),δ為一充分小的正數,一般情況下取δ≤E/1 000。
結合復合控制導彈的實際情況,選取如下伸縮因子:
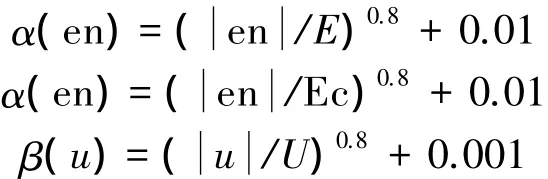
其中,M為一較大的正數,經驗證α(en)滿足伸縮因子的選取原則,并且滿足避零性、單調性、協調性、正規性、對偶性公理。
2.4 控制分配算法
本節使用可通過導引頭測量或估算的彈目相對距離R、可通過加速度計測量的過載跟蹤誤差E ,給出控制分配參數的確定原則及方法。由于彈目相對距離R的大小受目標機動及導引頭測量誤差影響,會帶有較大的不確定干擾,過載跟蹤誤差E 主要由加速度計測量,由于姿控發動機推力及噴流干擾的影響也會存在較大干擾。為增強算法的實用性,控制分配算法設計時需采用不依賴系統精確的數學模型、對參數不確定因素具有魯棒性的算法。首先給出控制分配需遵循的基本原則:
1)當彈目相對距離R較大或過載跟蹤誤差E 較小時,為節約姿控發動機燃料,優先采用氣動力控制,直接力子系統關閉或者取較小值。此時直接力子系統的分配參數kj應較小。
2)當彈目相對距離R較小或過載跟蹤誤差E 較大時,為了提高響應速度,優先采用直接力控制,氣動力主要起協調作用。此時直接力子系統的分配參數kj應較大。
3)隨著彈目相對距離R的逐漸減小,應逐漸加大直接力子系統的分配參數kj。
4)隨著過載跟蹤誤差 E 的逐漸減小,應逐漸減小直接力子系統的分配參數kj直至為0。
5)一般情況下,直接力和氣動力的分配參數應滿足ka+kj≈1。
根據上述規則,可為2個子系統分別設計雙輸入單輸出模糊控制器,輸入量分別為彈目相對距離R、過載跟蹤誤差E,輸出為分配參數。采用如表2所示的控制分配規則表,為便于觀察,將直接力與氣動力分配規則寫于1個圖表內,前面參數表示直接力,后面參數表示氣動力。
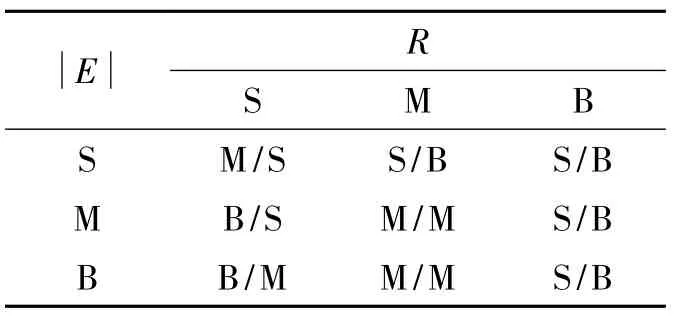
表2 控制分配規則表Table 2 Fuzzy rule for control allocation
隸屬度函數及解模糊方法采用2.2節類似的方法。控制分配參數論域范圍為[0,1],R、E 的論域范圍是一個很重要的參數,決定了直接力的開啟時刻,資料表明[10],國外復合控制導彈一般是在0.5~1 s左右開啟姿控發動機,過早或過晚開啟都會影響攔截效率,設計時可結合導引頭捕獲目標距離、彈目相對速度、目標機動加速度、目標角閃爍等綜合因素來確定論域大小。
3 點火算法幾個工程應用問題
本節考慮狀態的可量測性和控制算法的實用性,對上節提出的復合控制算法在工程實現中存在的幾個問題進行討論。
3.1 有限時間收斂微分器設計
上述模糊控制器輸入端含過載及過載的微分信號,過載信號可由彈上慣測組合單元(IMU)直接測量,而微分信號可只能通過數值方法求得,但在導彈實際飛行過程中IMU會受到較大的噪聲干擾,利用差分原理的常規微分器很難正常工作。滑模微分器雖具有抑制噪聲的作用,但切換函數導致抖振,且參數確定需要知道信號導數的上界。有限時間收斂微分器[11](FTCD)對噪聲具有較強的抑制作用,可用于測量噪聲較大的場合。本文采用的二階FTCD對過載微分信號進行估計:
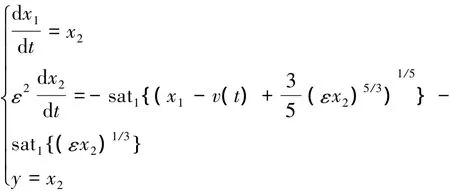
式中:sat(x)=1,擾動參數 ε=0.01,v(t)為測量信號(微分器的輸入),x2為信號的一階導數,y為微分器的輸出。
3.2 點火算法實現技術
3.2.1 滾轉穩定導彈點火算法實現
滾轉穩定型導彈,只需設計2組姿控發動機分別控制俯仰和偏航通道,通過2個通道的組合即可產生任意方向的法向控制力矩。
對于姿控發動機推力連續可調的復合控制導彈(如歐洲的Aster-15/30、德國的TLVS),通過調節噴口的閥門開度,即可使姿控發動機的推力正比于控制指令,此時本文設計的模糊控制器可直接應用。
對于姿控發動機只能輸出常值推力的導彈,工程上可采用脈沖調寬調頻(PWPF)技術將連續推力等效為常值脈沖推力,達到“數字變推力”的效果。
PWPF調節器原理如圖4所示,由一階濾波器、施密特觸發器(具有帶滯環的繼電器特性)及反饋回路組成,其中Km、Tm分別為一階慣性環節的放大系數、時間常數,Uon、Uof f、Um分別為繼電器的開關閥值、脈沖幅值,E為待調節的連續推力,p(t)為調節器的脈沖推力輸出。當輸入E=Uon時,可定義姿控發動機的最小脈沖寬度Δ:

定義一個周期T內點火時間和總時間之比為占空比DC:

根據圖4可推知:

其中,

PWPF的工作特性可由脈沖工作時間Ton、脈沖周期T、最小脈沖寬度Δ,以及占空比DC來描述。設計時要考慮導彈的實際約束:發動機點火頻率必須便于工程實現且避開導彈固有頻率以免產生共振;濾波器時間常數Tm應使姿控發動機的延遲盡可能小;增益Km應使線性區盡可能大。減小時間常數Tm和增大增益Km可以提高調節精度但會增加姿控發動機開關次數;增大施密特觸發器遲滯h會增加占空比DC的非線性度和最小脈沖寬度。具體設計時可以先由精度要求確定Ed,Es,再由最小脈沖寬度Δ及式(1)確定h與Km、Tm,最后很據式(2)確定所有參數。可參考 Krovel[12]等提出的PWPF控制器參數建議范圍,如表3所示。
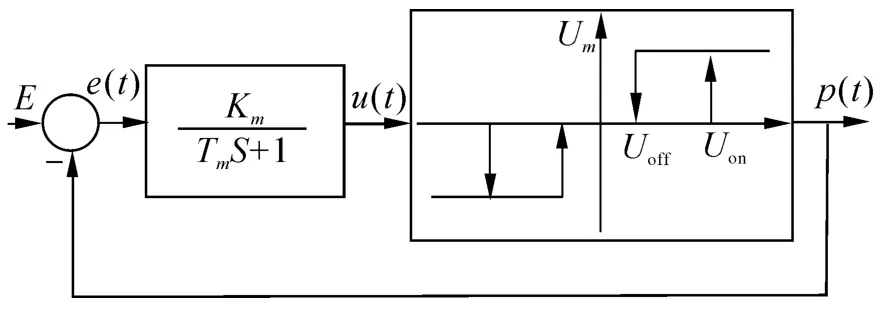
圖4 調制器原理Fig.4 Principle of PWPF modulator

表3 PWPF參數建議值Table 3 Recommended parameter values for PWPF
3.2.2 滾轉導彈點火算法實現
對于末制導段滾轉的導彈,一般采用多組小型脈沖發動機組成蜂窩結構(如美國的ERINT-1攔截彈),此時需要設計脈沖發動機點火方向和數量。
文獻[13]介紹了對稱點火、疊加點火、掃角點火等點火方案并進行了改進。但該文介紹和設計的點火算法只能跟蹤固定的點火指令,而實際上導彈和目標飛行狀態實時變化,點火指令是不斷變化的,以上幾種點火方案實際應用時會極大地浪費脈沖發動機并降低過載跟蹤速度。本節將在此基礎上進行改進,并考慮彈體自旋對直接力分量的影響,提出一種改進的疊加點火方案,步驟如下:
1)將導彈準彈體系oy4,oz4方向上模糊控制器給出的點火指令Fyi,Fzi進行矢量疊加,得到當前總的點火指令:

2)立即開啟離當前ti時刻總點火指令Fi反方向最近一排的Ni(i=1,2,3...)個脈沖發動機,產生的直接力矢量為,則有:

式中:ei為點火誤差矢量,Favg為單個脈沖發動機作用時間T內,考慮導彈自旋運動的等效推力:
式中:FT為單個脈沖發動機點火產生的推力值。
Ni為第i次點火的脈沖發動機數目,可采用如下方法確定:

式中:Nimax為該列可用的脈沖發動機數目。
3)經過T+ε,即第i排脈沖發動機點火完畢后ε秒,制導系統和復合控制器對彈目狀態和點火誤差ei進行解算,更新下一時刻ti+1的點火指令Fi+1,重復步驟1)、2)對新點火指令進行跟蹤。其中ε為設置的“等待時間”,以讓高速來流吹除導彈表面噴流產生的流場,便于進行狀態測量和指令解算。如導彈長度為l,飛行速度為V,可令ε=l/V。
記錄每次點火消耗的脈沖發動機數目和位置,依次操作步驟1)、2)、3),直至導彈命中目標。
這種改進型疊加點火方案與對稱點火方案的優勢在于可以同時跟蹤2個通道內的點火指令,節省脈沖發動機消耗;與掃角點火方案的優勢在于響應速度快,無需等彈體旋轉到與指令反方向完全重合時才點火。該方案可以跟蹤實時變化的點火指令并且充分考慮了彈體自旋的影響,應用性較強。
4 仿真實驗與結果分析
在Matlab/Simulink中對本文設計的復合控制系統進行仿真驗證。噴流干擾近似為攻角α的一次函數,選取的某一高空特征點參數如表4所示。參數具體含義參照上文及文獻[8]。
表4 仿真參數Table 4 Simulation parameters
將氣動參數攝動30%,直接力子系統采用本文提出的模糊控制算法,氣動力控制子系統仍然采用傳統PID控制方法,系統狀態初值均設為0,跟蹤的過載指令為nc=20g的階躍信號。
考慮到當前飛行器的過載機動能力及對導彈響應速度的要求,點火算法中en,en'的初始論域分別取為[-20,20]、[-40,40];控制分配算法中 R的論域取為[0,2 000],利用上述參數進行數學仿真,結果如圖5~8所示。圖5中2條曲線分別為采用連續推力和常值推力姿控發動機的導彈過載跟蹤曲線。從曲線中可以看出:采用復合控制后即使在17km的高空,導彈仍能迅速的建立較大過載;采用連續推力姿控發動機的導彈過載響應較平滑,采用常值推力姿控發動機的導彈過載上升段出現較大抖動,主要是由于發動機點火瞬間產生的推力導致的(即姿控發動機的“軌控效應”),在氣動舵的配合下不會對彈體穩定性帶來較大影響;采用連續推力姿控發動機的導彈過載上升速度較快,這是由于接近指令過載時,復合控制器為避免較大超調輸出較小的直接力,此時常值推力姿控發動機無法響應,而連續推力姿控發動機此時仍能響應。
圖5 過載跟蹤曲線Fig.5 Overload tracking curves
圖6為攻角變化曲線。可以看出攻角的變化迅速、平穩,能很快達到穩定且超調量較小,沒有因為姿控發動機點火推力及噴流干擾而出現較大波動。說明本文設計的姿控發動機點火算法和控制分配算法能有效地協調直接力與氣動力子系統,且復合控制器對噴流干擾具有較強的魯棒性。
圖6 攻角變化曲線Fig.6 Curve of attack angle
圖7為采用常值推力姿控發動機導彈的PWPF點火序列。可以看出,經PWPF調制后姿控發動機只需點火7次,點火最小脈沖寬度符合設計要求,并且無需反向點火,因此較節省燃料。圖8為采用脈沖發動機的旋轉彈在響應過載指令時發動機消耗情況。可以看出,整個響應過程共消耗29個脈沖發動機,主要集中在過載上升段,且數量不斷減小。
對比圖7和圖8,僅從對過載指令的有效響應時間這一角度來看,在相同的指令過載下,如果姿控發動機推力不能連續可調,則采用多組脈沖發動機能更長時間地對指令進行響應,響應品質優于采用PWPF調節的姿控發動機。這主要是由于通過控制脈沖發動機點火數量可以產生不同大小的推力,使用靈活性較高;而采用PWPF調節的常值推力姿控發動機每次點火的推力大小都是固定的,并且受最小脈沖寬度等約束,不能無限制地提高點火頻率。
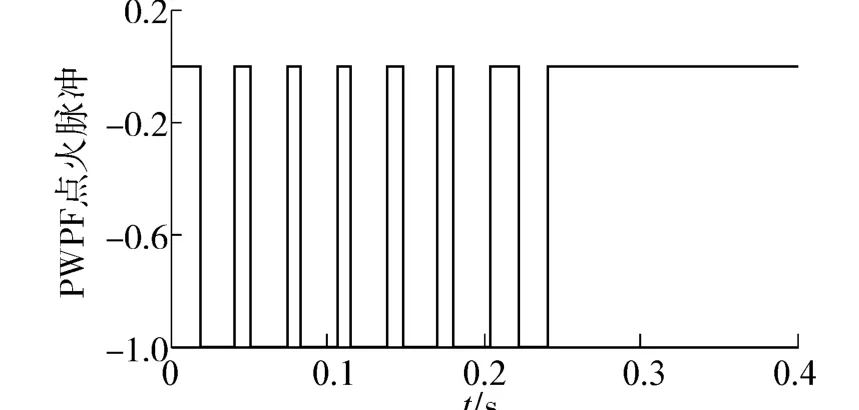
圖7 PWPF點火脈沖Fig.7 Ignition pulses of PWPF
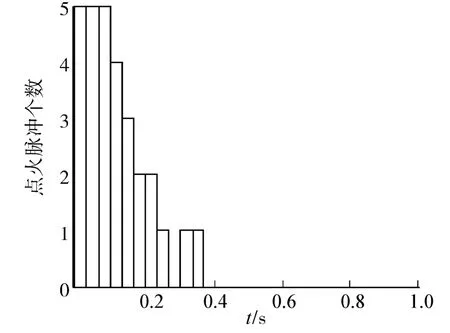
圖8 脈沖發動機消耗個數Fig.8 Consumption of impulse thrusters
5 結束語
本文所設計的復合控制器彌補了氣動力不足導致的響應延遲,對過載指令能迅速響應,且動態品質較好。點火算法對噴流干擾具有較強的魯棒性,控制分配算法能夠使直接力和氣動力子系統協調工作,所提出的控制器設計方法具有一定的理論及工程參考價值。未來將進一步研究2個操縱機構的內在特性,在點火算法設計時綜合考慮制導系統影響,以求進一步改進復合控制導彈的控制器設計。
[1]魏明英.直接側向力與氣動力復合控制技術綜述[J].現代防御技術,2012,40(1):52-55.WEI Mingying.Summary of blended control technology for missiles with lateral jets and aerodynamic surfaces[J].Modern Defence Technology,2012,40(1):52-55.
[2]程鳳舟.攔截戰術彈道導彈末段制導和復合控制研究[D].西安:西北工業大學,2002:7-8.CHENG Fengzhou.Studies of guidance and combined control in terminal phase when intercepting tactical ballistic missile[D].Xi'an:Northwestern Polytechnical University,2002:7-8.
[3]RIDGELY D B,DRAKE D,TRIPLETT L.Dynamic control allocation of a missile with tails and reaction jets[C]//AIAA Guidance,Navigation,and Control Conference and Exhibit.Hilton Head,USA,2007.
[4]SHTESSEL Y,TOURNESC,SHCOLNIKOV I.Guidance and autopilot for missiles steered by aerodynamic lift and divert thrusters using second order sliding modes[C]//AIAA Guidance,Navigation,and Control Conf.Keystone,USA,2006.
[5]馬克茂,趙輝,張德成.導彈直接側向力與氣動力復合控制設計與實現[J].宇航學報,2011,32(2):310-316.MA Kemao,ZHAO Hui,ZHANG Decheng.Control design and implementation formissileswith blended lateral jets and aerodynamic control systems[J].Journal of Astronautics,2011,32(2):310-316.
[6]滕江川,吳曉燕,陳永興.基于模糊控制理論的脈沖推力器點火算法[J].四川大學學報:工程科學版,2011,43(1):194-197.TENG Jiangchuan,WU Xiaoyan,CHEN Yongxing.Fire algorithm of pluse thruster based on fuzzy control theory[J].Journal of Sichuan University:Engineering Science Edition,2011,43(1):194-197.
[7]周銳,王軍.導彈氣動力/直接力自適應控制分配及優化設計[J].航空學報,2007,28(1):187-190.ZHOU Rui,WANG Jun.Adaptive control allocation between aerodynamic fin and side thruster and controller design usingmulti-objective optimization[J].Acta Aeronautica et Astronautic Sinica,2007,28(1):187-190.
[8]錢杏芳,林瑞雄,趙亞男.導彈飛行力學[M].北京:北京理工大學出版社,2002:36-48.
[9]李洪興.變論域自適應模糊控制器[J].中國科學(E輯),1999,29(1):32-42.LIHongxing.Adaptive fuzzy controller based on variable universe[J].Science in China(Series E),1999,29(1):32-42.
[10]斯維特洛夫B T.防空導彈設計[M].北京:中國宇航出版社,2004:349-354.
[11]WANG Xinhua,CHEN Zengqiang,YANG Geng.Finite time convergent differentiator based on singular perturbation technique[J].IEEE Transactions on Automatic Control,2007,52(9):1731-1737.
[12]KROVEL TD.Optimal tuning of PWPF modulator for attitude control[D].[S.l.]:Norwegian University of Science and Technology,2005:38-40.
[13]尹永鑫.氣動力/直接力復合控制攔截彈制導與控制方法研究[D].哈爾濱:哈爾濱工業大學,2008:71-76.YIN Yongxin.Research on guidance and control method of intercepter missile with aerodynamic and lateral thrust blended[D].Harbin:Harbin Institute of Technology,2008:71-76.
猜你喜歡
汽車維修與保養(2021年8期)2021-02-16 00:28:30
汽車維修與保養(2021年8期)2021-02-16 00:28:18
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
汽車與新動力(2015年1期)2015-02-27 12:11:01
汽車與新動力(2014年2期)2014-02-27 12:10:15
汽車與新動力(2013年5期)2013-03-11 16:08:17