基于CATIA軟件的列車過小曲線運(yùn)動仿真校核
2014-10-25 06:11:38蔡軍爽杜健宋顯剛
鐵路技術(shù)創(chuàng)新 2014年4期
■ 蔡軍爽 杜健 宋顯剛
0 引言
機(jī)車車輛幾何曲線通過計(jì)算是一種常見的計(jì)算,主要校核車輛連掛通過曲線時(shí)車體端墻之間或司機(jī)室前罩之間最小距離及車鉤的擺角。設(shè)計(jì)之初進(jìn)行曲線通過計(jì)算可以有效校核運(yùn)動部件及其周邊設(shè)備的布置合理性,避免干涉。進(jìn)行小曲線通過計(jì)算,傳統(tǒng)算法一般是通過幾何關(guān)系進(jìn)行CAD制圖,每種路況(直線加曲線、曲線、反曲線等)都需單獨(dú)進(jìn)行制圖校核。與傳統(tǒng)的計(jì)算方法相比,基于CATIA軟件中的DMU運(yùn)動機(jī)構(gòu)模塊進(jìn)行列車過小曲線的運(yùn)動仿真,可真實(shí)且一次性反映出列車實(shí)際通過小曲線所有路況時(shí)的運(yùn)動狀態(tài),其校核方法更加方便、形象、準(zhǔn)確[1]。
1 傳統(tǒng)的幾何繪圖計(jì)算方法
以某車輛為例,其車輛參數(shù)見表1。選取其中一種路況,即兩車輛均在R180 m的曲線上,且不考慮車鉤壓縮、車輛相對于轉(zhuǎn)向架的偏移等特殊情況。校核此時(shí)列車通過曲線時(shí),兩輛中間車車鉤及車體之間的運(yùn)動相對關(guān)系。
首先,利用傳統(tǒng)的幾何繪圖計(jì)算方法進(jìn)行校核(見圖1)。先畫一個R180 000 mm的圓弧來表示鐵軌之間的中心弧線。在圓弧上的任意位置作為圓心,以R17 500 mm畫圓,通過此圓畫一直線17 500 mm,直線兩端均在R180 000 mm上,表示兩枕梁中心(轉(zhuǎn)向架中心)均落在鋼軌中心線上。在此17 500 mm直線的兩端各以2 830 mm為半徑畫圓,尋找車鉤轉(zhuǎn)動中心。延長17 500 mm直線至R2 830 mm圓弧上后,刪除R2 830 mm圓弧。再在R180 000 mm圓弧上任意作17 500 mm直線,以相同方式找到R2 830 mm上的延長線的點(diǎn)。以這3個延長線的點(diǎn)為“三點(diǎn)畫圓”,生成的圓上任意一點(diǎn)均是“車鉤轉(zhuǎn)動中心的位置”。以車鉤轉(zhuǎn)動中心為圓心以1 840 mm(2×920=1 840)為半徑畫圓。此圓與車鉤轉(zhuǎn)動中心圓弧相交的點(diǎn)便是另一輛車的車鉤轉(zhuǎn)動中心點(diǎn)。連接此兩車鉤轉(zhuǎn)動中心點(diǎn)為一直線。車輛縱向中心線與此直線的夾角為車鉤擺角。
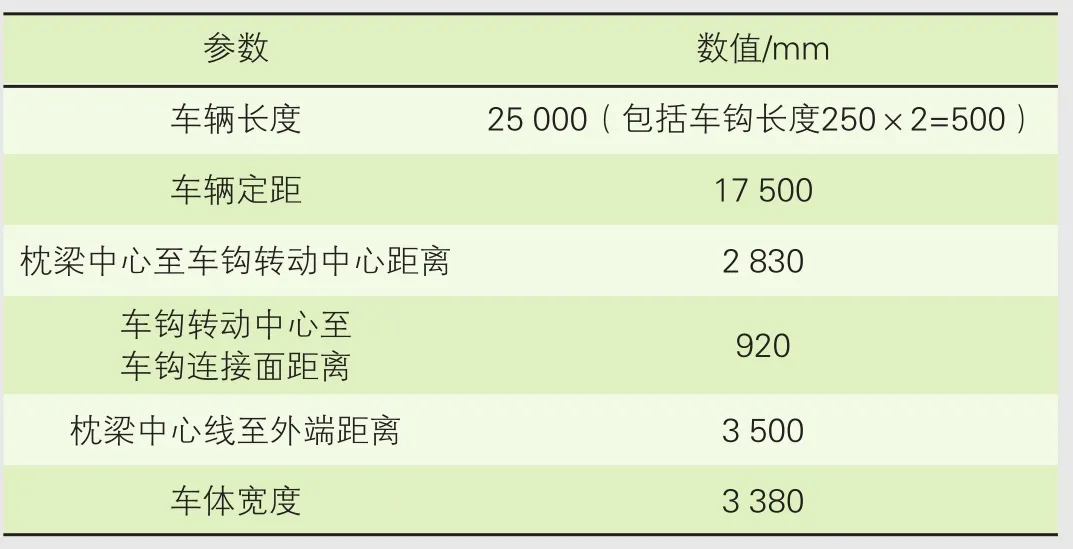
表1 車輛參數(shù)
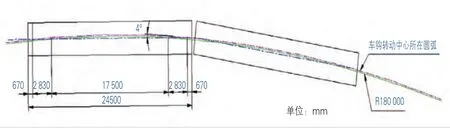
圖1 幾何圖形法進(jìn)行列車通過R180m曲線校核
經(jīng)過此方法得到,當(dāng)兩車輛完全在R180 m曲線上時(shí),車鉤橫向擺角為4°,兩車體端墻間的最小距離為268 mm。
2 DMU功能驗(yàn)證
DMU是數(shù)字樣機(jī)(Digital Mock-Up)的簡稱,采用DMU技術(shù),在計(jì)算機(jī)中建立完整的產(chǎn)品數(shù)字樣車,對產(chǎn)品進(jìn)行計(jì)算機(jī)模擬裝配、模擬試驗(yàn)、模擬維修,組成數(shù)字樣機(jī)的每個部件都具有實(shí)物的尺寸及公差、裝配、材料等特性,用以驗(yàn)證產(chǎn)品設(shè)計(jì)、運(yùn)動校核、部件拆裝維護(hù)等。
數(shù)字樣機(jī)技術(shù)使人們在工程決策和過程決策的協(xié)同工作時(shí),能夠?qū)θ魏螐?fù)雜的模型進(jìn)行內(nèi)部觀察、周游、檢查和模擬。CATIA軟件中的DMU模塊主要是通過調(diào)用大量已有的多個種類的運(yùn)動副或通過自動轉(zhuǎn)換機(jī)械裝配約束條件而產(chǎn)生的運(yùn)動副,對任何規(guī)模的電子樣機(jī)進(jìn)行運(yùn)動機(jī)構(gòu)定義。通過運(yùn)動干涉檢驗(yàn)和校核最小間隙來進(jìn)行機(jī)構(gòu)運(yùn)動分析。利用DMU模塊實(shí)現(xiàn)列車在小曲線上的運(yùn)動仿真,可以真實(shí)反映車鉤的運(yùn)動狀態(tài),幫助工程師減少開發(fā)成本,提高效率[2]。
3 驗(yàn)證過程
3.1 CATIA建模
在CATIA軟件中建立一個產(chǎn)品,包括車輛、車鉤及鋼軌路基等零件。鋼軌路基設(shè)置成一條囊括直線段、R180 m的曲線段及反曲線路段的曲線,這樣運(yùn)動仿真一次就可以模擬出所有路況下車輛的運(yùn)動狀態(tài),省去了基于幾何計(jì)算方法下一個路況一次計(jì)算的麻煩。車輛及車鉤根據(jù)表1所列的車輛參數(shù)進(jìn)行建模,車輛過曲線模型見圖2。
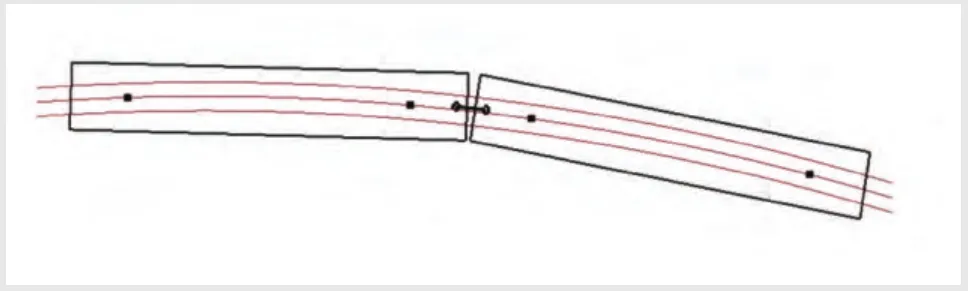
圖2 基于CATIA軟件的車輛過曲線模型
3.2 設(shè)置運(yùn)動關(guān)系副
首先,利用DMU運(yùn)動機(jī)構(gòu)模塊設(shè)置一個機(jī)械裝置,在此機(jī)械裝置下添加接合關(guān)系、固定零件及驅(qū)動命令等。車輛在沿軌道運(yùn)行時(shí),理想狀態(tài)下,轉(zhuǎn)向架的中心銷始終在兩軌中心線的軌跡上,也就是車體的枕梁中心點(diǎn)始終處于軌道中心線上。因此,添加“點(diǎn)曲線接合”命令,將每一車輛的枕梁中心點(diǎn)均設(shè)置沿著R180 m的小曲線半徑軌跡運(yùn)行(見圖3)。車鉤與車體連接采用“旋轉(zhuǎn)結(jié)合”命令,設(shè)置成車鉤繞車鉤轉(zhuǎn)動中心軸旋轉(zhuǎn)運(yùn)動。最后,設(shè)置固定零件為“鋼軌路基”。
3.3 機(jī)構(gòu)的運(yùn)動模擬及瞬時(shí)值實(shí)時(shí)監(jiān)測
設(shè)置完運(yùn)動關(guān)系副,命令以枕梁中心點(diǎn)沿曲線驅(qū)動,當(dāng)自由度顯示為“0”時(shí),機(jī)械裝置就可以進(jìn)行運(yùn)動模擬(見圖4)。在整個運(yùn)動仿真的過程中,可打開“傳感器”中的“瞬間值”進(jìn)行實(shí)時(shí)觀察車鉤擺角及車體間的最小距離。并可以調(diào)整步驟數(shù)來調(diào)節(jié)列車在小曲線上運(yùn)行的速度,便于更好地觀測車鉤擺角及車間距離的變化(見圖5)。
3.4 對應(yīng)關(guān)系的圖表表達(dá)
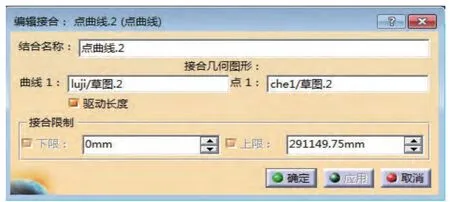
圖3 設(shè)置接合關(guān)系
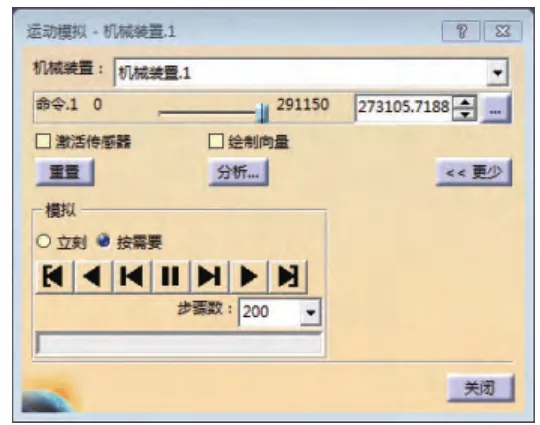
圖4 機(jī)構(gòu)的運(yùn)動模擬
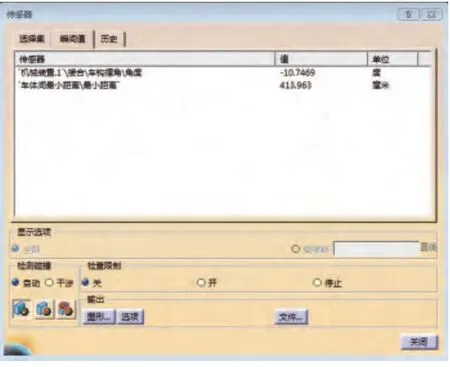
圖5 車鉤擺角及車間最小距離實(shí) 時(shí)監(jiān)測
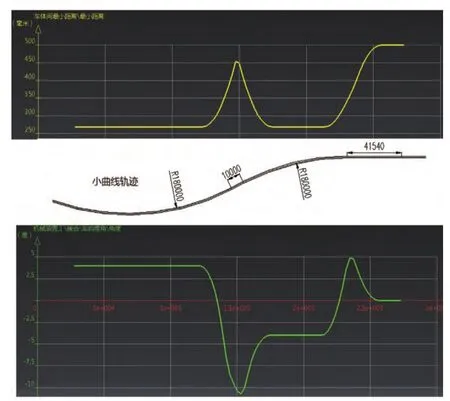
圖6 車體間最小距離、車鉤擺角與小曲線軌跡的對應(yīng)
整個運(yùn)動仿真結(jié)束后,可以輸出整個曲線軌跡上任一點(diǎn)的車體間最小距離及車鉤擺角的圖表(見圖6),上半部分為車體間最小距離的曲線,中間部分為軌道曲線,下半部分為車鉤擺角曲線。從圖表中可以直觀地看出,當(dāng)車輛處于直線段時(shí),車輛間的距離就是兩個伸出的車鉤的長度,即車端間距500 mm。當(dāng)車輛經(jīng)過線路從直線段過渡到R180 m的圓弧段時(shí),車輛間距從500 mm逐漸變?yōu)?68 mm。兩車輛完全在圓弧上時(shí),此時(shí)車輛間的距離也是恒定最小的,即268 mm。車輛進(jìn)入反曲線時(shí),兩車間最小距離由268 mm變?yōu)?60 mm,完全進(jìn)入下一個R180 m的圓弧后,最小距離恒定為268 mm。
再看車鉤擺角,從圖6中可以明顯看到,當(dāng)兩車輛處于直線段時(shí),車鉤擺角為0°。當(dāng)車輛處于反曲線時(shí)車鉤擺角最大,為10.7°。當(dāng)車輛完全進(jìn)入到R180 m的圓弧后,其車鉤擺角恒定保持在4°。
可見,當(dāng)車體處于R180 m的曲線上時(shí),其車體間最小距離268 mm及車鉤擺角4°都與幾何畫圖方法計(jì)算得到的結(jié)果吻合,也互相驗(yàn)證2種方法的準(zhǔn)確、可靠,但利用運(yùn)動仿真輸出圖表的方式更加直觀。當(dāng)驗(yàn)證得到車鉤的最大擺角及車體間的最小距離后,一方面驗(yàn)證車鉤的最大擺角是否超出其極限范圍,另一方面可以指導(dǎo)設(shè)計(jì)進(jìn)行車鉤周邊及車體端墻上設(shè)備的布置。
4 結(jié)束語
基于CATIA軟件的列車過小曲線運(yùn)動仿真校核方法,不僅直觀、準(zhǔn)確可靠,更重要的是方便。如果利用傳統(tǒng)的幾何圖形法,直線曲線段、曲線段及反曲段就要分不同的路況分別進(jìn)行繪圖。而DMU運(yùn)動仿真方法只需將這些路況在一條軌跡線上表達(dá)出即可。在此方法的基礎(chǔ)上,還可進(jìn)行以下的擴(kuò)展應(yīng)用。
(1)高速動車組頭部關(guān)系比較復(fù)雜,包括車鉤、開閉機(jī)構(gòu)、頭罩及一些制動管路。進(jìn)行詳細(xì)的三維建模后,進(jìn)行頭車聯(lián)掛后運(yùn)動仿真,可以真實(shí)地反映實(shí)車連掛運(yùn)行的狀態(tài),找到運(yùn)動干涉點(diǎn),然后進(jìn)行改進(jìn)。
(2)參數(shù)化設(shè)置,如將枕梁中心距車鉤轉(zhuǎn)動中心的距離、車鉤轉(zhuǎn)動中心距車鉤面的距離等設(shè)置成參數(shù),甚至將路基軌跡設(shè)置成參數(shù)化。這樣,驗(yàn)證不同車型在不同軌跡上運(yùn)行的關(guān)系時(shí),只需更改下參數(shù)即可。
(3)考慮車鉤壓縮量,車體相對于轉(zhuǎn)向架的橫向偏移量對運(yùn)動仿真結(jié)果的影響。將這些變量進(jìn)行參數(shù)化設(shè)置,將更加逼真地進(jìn)行運(yùn)動仿真的校核。
(4)進(jìn)行列車過豎曲線校核,同時(shí)考慮轉(zhuǎn)向架輪緣磨損及空氣彈簧失氣工況下的車鉤上下擺動量,與車鉤的橫向擺動量形成一個包絡(luò)體,此區(qū)域內(nèi)禁止有其他設(shè)備。
[1] 羅仁,干峰,騰萬秀,等. 連掛車輛幾何曲線通過 計(jì)算[J]. 電力機(jī)車與城軌車輛,2013(4):16-19.
[2] 劉海霞. DMU在商用車開發(fā)中的研究與應(yīng)用[J]. 汽 車科技,2012(4):53-56.
