基于交互環境的石化裝置虛擬培訓系統
2014-10-11 06:32:14王春李磊劉剛
化工進展 2014年2期
王春,李磊,劉剛
(中國石油化工股份有限公司青島安全工程研究院,山東 青島 266071)
石化企業大多數生產設備必須連續作業,并具有高溫、高壓、易燃、易爆等特點,在很大程度上限制了人們對系統的研究和優化,以及對操作人員和管理人員的培訓。而虛擬現實技術(virtual reality,VR)作為一種新型的人機接口技術,為使用者提供了與虛擬環境進行自然交互的手段,利用先進的硬件及軟件工具,使參與者能交互式地觀察和操縱虛擬環境。
虛擬培訓是目前虛擬現實領域比較廣泛的一項應用,易濤[1]、鄭云棟[2]等分別研究了石化企業虛擬現實仿真系統,系統偏向于在三維場景中對工藝流程及生產數據進行統計分析從而對員工進行培訓。韓冬等[3]研究了針對大型儲罐的虛擬救援場景。但是目前已有的虛擬現實系統大部分以三維場景瀏覽和視覺交互為主,缺少利用數據手套等硬件設備的交互,特別是在事故模擬方面,主要采用基于模型的粒子系統來描述,對事故的發生發展過程及后果無法形象的模擬。
本文利用數據手套等虛擬現實硬件設備作為人機交互工具,利用流體力學數值模擬技術對事故進行仿真,采用圖形處理器(graphic processing unit,GPU)對事故場景進行三維渲染,開發石化裝置虛擬培訓系統,為使用者與虛擬場景之間搭建一個實時交互的虛擬環境,在不破壞實際生產連續性的前提下,模擬各種工藝條件下的生產狀態,使員工快速掌握裝置的工藝流程,并積累豐富的生產操作經驗。
1 系統設計
1.1 總體功能設計
基于交互環境的石化裝置虛擬培訓系統的總體設計目標是利用虛擬現實軟硬件設備實現一套石化企業綜合虛擬培訓系統,在利用計算機生成的三維訓練場景中實現對規定好的某種設備使用過程進行培訓,通過培訓系統的使用,實現石化企業“七化”管理,即抽象理論有形化、地下設施地面化、內部構成剖面化、工藝流程系統化、技能訓練實戰化、隱性部件可視化、培訓系統數字化。針對上述需求目標,系統集成教學演示、實操培訓及培訓評估 3個主要模塊。
(1)教學演示模塊 以視頻、音頻、動畫等多媒體形式實現操作過程演示、設備剖析、工藝流程等功能。
(2)實操培訓模塊 系統的核心模塊,主要由人機交互功能組成,用戶使用數據手套、力反饋器等交互設備,按照一定的操作順序對計算機生成的三維場景下的裝置、設備進行操作,完成各項任務,主要包括打開/關閉閥門、使用消防器材、應急救援行動、安裝和拆卸部件以及操作面板等功能。
(3)培訓評估模塊 在操作后對關鍵操作行為進行評估,得到培訓成績,以加強培訓效果。
1.2 系統構架設計
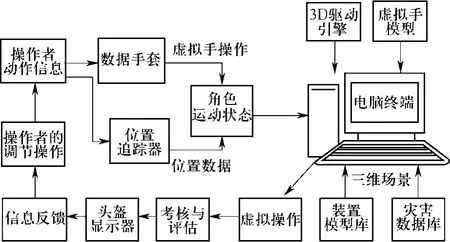
圖1 石化裝置虛擬培訓系統結構圖
基于交互環境的石化裝置虛擬培訓系統運用虛擬現實技術、傳感器技術、網絡技術、流體力學數值模擬技術配合虛擬現實硬件設備在電腦終端和數據頭盔上為石化企業作業人員提供真實的虛擬場景,系統主要由3D驅動引擎、數據手套模塊、頭盔顯示器模塊、場景數據庫模塊、考核評估模塊及電腦終端等構成。系統結構如圖1所示。
(1)3D驅動引擎是該培訓系統的核心部分,基于VC.NET和OpenGL(Open Graphics Library)開發,負責顯示、組織和管理三維裝置虛擬場景的數據。用于表現渲染三維培訓場景,實現石化裝置標準化培訓的各種應用,提供系統二次開發的接口與工具。
(2)數據手套模塊包括對閥門、消防設備等設備的虛擬操作識別、數據手套及與之相連的傳感器,通過虛擬手操作實現對虛擬場景中設備和物體的實時交互。
(3)頭盔顯示器模塊包括頭盔顯示器及與之相連的傳感器、耳機,為使用者提供一個沉浸的虛擬環境,并感知受訓人員頭部方位。
(4)裝置模型庫包括廠房、裝置及設備立體層次的三維數字化模型,模型與現實場景按照等比例構建,另外還包括基礎信息數據、工藝流程數據、實時運行參數等數據。
(5)災害數據庫利用計算流體力學模擬泄漏、火災等事故的發生發展過程,利用GPU三維災害渲染算法在虛擬場景中進行模擬,再現事故的發生過程及危害范圍。
(6)考核評估包括電子試卷、自動評分及情景考核等內容。
2 核心技術
2.1 虛擬手的仿真算法
虛擬手是虛擬現實技術的重要組成部分,為用戶提供了一種全新的人機交互方式,能夠使用戶更好地融入系統所構建的虛擬場景中。虛擬手技術利用計算機技術使操作者通過虛擬外設將人手的操作信息傳遞給虛擬場景中的虛擬手模型,實現人手到虛擬手的動作映射,從而實現與虛擬環境的實時交互。
常用的數據手套采集得到的數據值是 0~255之間的整數值,數據之間的間隔太大,精度不高。如果直接使用該數據來計算手部各個關節的角度并驅動虛擬手的運動,會產生明顯的跳躍而不連續,因此需要對該原始數據進行平滑處理。處理方法是采用線性插值,即當前幀的數據是前幾幀數據的平均值,用式(1)表示。
工程計劃部門根據現場實際情況的反饋及時調整相應的數值供財務部及物資部門改變原有的計劃,也就是將工程質量管理的PDCA模式運用到項目的物資供應管理中。
式中,yt是t時刻采集的數據值;n為采集的幀數。
從虛擬手操作的實現過程來看,實現虛擬手操作需解決幾個關鍵問題:碰撞檢測[4]、待操作模型的運動方式、虛擬手的姿態調整以及操作條件[5]。在利用數據手套對虛擬物體進行操作時,手指的姿態是完成操作的關鍵,張鑫等[6]研究了利用循環坐標下降逆運動學(CCD IK)算法。本文將通過外設得到的手指姿態數據利用逆運動學算法進行計算,使虛擬環境中的手指模型始終保持在待操作模型的表面,根據虛擬手操作的特點,姿態調整的目標主要包括:①調整后手指首先與模型接觸的位置始終保持在模型表面;②調整手指姿態的目標是展開,即調整后手指的彎曲程度減小;③調整時手指各關節必須滿足特定的要求。虛擬手每根手指均包含DIP、PIP和MCP3個關節,共有4個旋轉自由度,由 4 個關節角θDIP、θPIP、θMCP、θAbduction組成,如圖2所示[7-8]。虛擬手的各個關節通過數據手套采集的數據計算關節角度,每個關節角度通過改進的CCD算法求解。手指的姿態調整受關節自由度的限制,對關節DIP與PIP,關節角度的調整受到θDIP和θPIP的限制,并且只能在其關節平面上進行,因此,利用改進的CCD算法,首先在調整DIP和PIP的角度時,將其目標位置映射到關節平面上,然后通過調整接觸點、投影點和關節轉動軸的夾角來實現關節角度的調整。在三維系統中的效果如圖3所示。
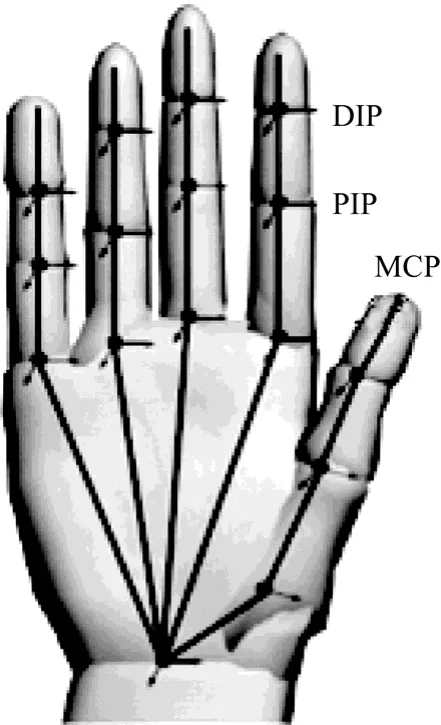
圖2 手關節劃分

圖3 虛擬手控制閥門
虛擬手的整體位置和姿態通過位置追蹤器獲取,即用獲取手腕的值驅動手腕運動。理論上當位置追蹤器靜止時采集得到的數據是一個恒定值,但是在實際采集過程中由于受到信號噪聲的干擾會使采集得到的數據產生跳變,而如果直接使用跳變的數據驅動人體的運動,從視覺上就會產生抖動,即動作不連續,同時也會增加操作的難度。因此,對采集得到的數據也需要進行平滑處理。本文主要借鑒維納濾波的方法消除信號噪聲,由式(2)計算。

式中,H'(u,v)為H(u,v)的共軛,k為一常數,所有H、F、G均為矩陣。
2.2 基于GPU的事故仿真算法
對于石化裝置發生的典型事故如泄漏、火災和爆炸事故,通過現場調研,了解裝置內介質分布情況、操作工況、介質性質、周邊環境等基本信息,根據危險性分析的結果,設定可能發生的介質泄漏擴散的場景,通過數值模擬分析來得出各種影響因素下不同泄漏工況的可燃氣體空間分布情況;同時根據蒸汽云空間爆炸的理論預先估計出裝置區內最可能發生爆炸事故的主要位置以及爆炸造成危害最大的區域(最擁擠或受限制部位),評估爆炸區域劃分。危險性評估實施的主體原則為:定性分析(理論經驗為主)→最危險狀況爆炸分析→真實情況模擬→爆炸概率分析。根據以上原則,利用氣體擴散爆炸專業模擬軟件 FLACS計算出石化裝置泄漏、火災及爆炸等事故的模擬結果,如圖4所示。本文利用虛擬現實技術對計算得到的模擬結果進行三維展示,從而更加準確地反映出各種事故的發生、發展過程及形態,為虛擬培訓系統中事故場景的真實性與準確性提供支持。
本文采用的事故三維渲染方法基于面片疊加法[9],在GPU上實現事故的全部渲染工作,從面片的生成、排序和渲染全在GPU內部完成,實現了虛擬培訓系統中所需要的實時大規模泄漏、火災等事故三維模擬。
2.2.1 事故紋理的管理與組織

圖4 不同時間燃料泄漏擴散數值模擬
2.2.2 事故三維渲染
系統需要表現氣體泄漏等事故隨時間變化濃度及擴散情況的變化,因此組成泄漏氣體的面片需要帶有一定透明度,所以必須按照面片距離攝像機的遠近,采取由遠及近的渲染順序進行渲染,否則就會出現比較凌亂的渲染結果。由于GPU的工作方式是單指令多數據的方式,因此GPU上的排序是一種并行數據排序方法,本文采用了一種優化的BITONIC算法[11]。系統采用的排序都在GPU中進行,在排序結束時,幀緩存對象中存儲著排序的結果數據。OpenGL圖形引擎能夠將對象讀取到頂點緩存對象中,從而完成將紋理數據轉換為頂點緩存數據的工作,這樣,轉換的過程只需要在GPU中完成,而不需要由CPU到GPU的數據傳遞。為了實現在GPU中實時繪制氣體泄漏的三維效果,本文利用圖形引擎中的幾何著色器在 GPU內生成新的幾何圖元[12]。幾何著色器定義了4種新的可調整圖元類型GL_LINES_ADJACENCY_ EXT、GL_LINE_STRIP_ADJACENCY_EXT、GL_TRIANGLES_ADJACENCY_EXT和GL_ TRIANGLE_STRIP_ADJACENCY_EXT。在鏈接程序之前必須告訴OpenGL其幾何著色器的輸入圖元類型并不一定對應 glBegin函數的參數,因此需要設置輸入類型,實現過程如下。

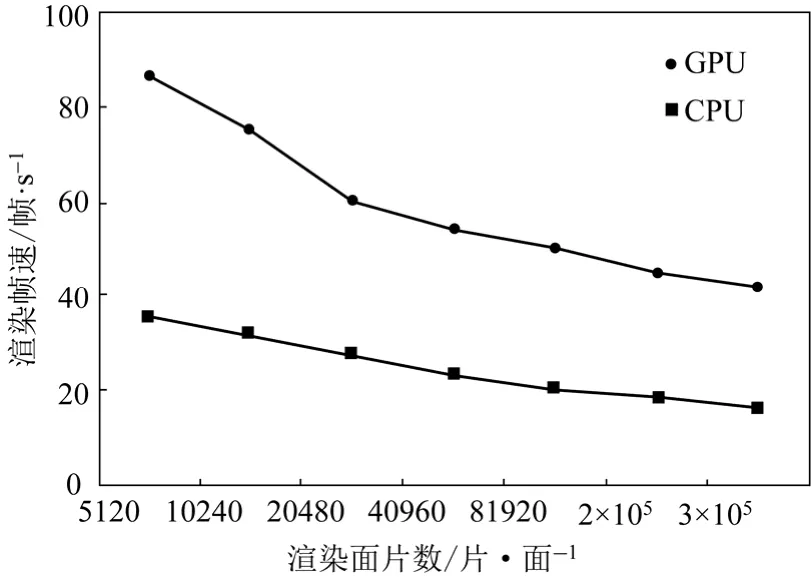
圖5 GPU與CPU事故渲染幀速對比
由圖5可以看出,基于GPU的事故渲染效率遠高于CPU的渲染效率,隨著面片的增加,兩者的效率差更加明顯,這表明本文所述的基于GPU的石化企業事故渲染方法能夠提高渲染效率,在虛擬現實系統中有較好的實用性。
3 系統實現及效果
本文選取中國石化某石化公司延遲焦化裝置作為模擬背景,延遲焦化裝置是石油化工企業主要的生產裝置,原料、中間產品及產品均為易燃、易爆及可燃性物質,這些性質決定了在生產過程中存在較大的泄漏、火災、爆炸等事故危險性;而且延遲焦化裝置是一個連續生產過程,參數多并且相互關聯,生產中要求長周期穩定運行,因此對操作人員有著很高的要求;另外,由于延遲焦化裝置生產的持續性,很難在裝置上對操作人員進行實際操作技能的培訓,尤其像開工、停工及事故處理等操作技能,在裝置穩定生產正常運行情況下無法得到有效的訓練。
本文研發的虛擬培訓系統在Core 2 Duo E8300處理器、2G內存、專業級顯卡、操作系統選用Windows 7的電腦上,系統運行流暢。系統操作界面如圖6所示,當模擬事故場景時,幀速在50幀/s左右。虛擬培訓系統主要實現的功能包括以下幾點。
(1)支持石化企業裝置三維漫游及設備屬性查詢和可視化管理等功能,受訓者在三維環境中能夠更加真實的了解裝置及設備信息,身臨其境地體驗裝置的結構。
(2)能夠利用數據手套、位置追蹤器等硬件設備模擬用戶操作,實現打開/關閉閥門、使用滅火器、消防炮等消防器材等操作,以交互、直觀的方式實現員工的標準化操作培訓。
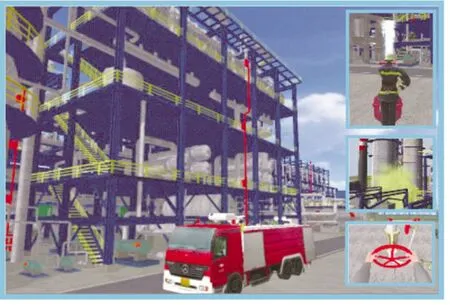
圖6 系統實現效果
(3)系統利用氣體擴散爆炸專業模擬軟件FLACS計算得到的泄漏、火災等事故數據,采用GPU技術實現實時渲染,模擬事故的發生發展過程和擴散范圍,為企業應急預案編制、事故預防、虛擬演練和事故調查提供技術支持。
(4)基于多角色的協同事故應急救援演練,能夠為受訓者提供一個逼真的事故場景,提升受訓者的事故處理能力,降低事故造成的損失,提高企業的應急培訓演練質量和效率。
4 結 論
本文開發的基于交互環境的石化裝置虛擬培訓系統以石化裝置為切入點,借助于數據手套、位置追蹤器等虛擬現實設備進行數字化培訓技術研究,為石化企業員工標準化操作培訓、應急演練等提供逼真的操作體驗,在不破壞實際生產連續性的前提下,模擬不同工藝條件下的生產狀態,在虛擬環境中熟悉裝置的標準化操作和事故處理操作,使員工對操作環境、操作設備、操作順序、設備維護等有直觀的認識,避免出現由于操作不當而引起的損失和傷害。本系統能夠為石化企業提供一種新的培訓方式和方法,提高員工的培訓效率和培訓質量。
目前該系統已經在中國石化某石化公司得到應用,并取得了良好的使用效果。在使用過程中用戶提出了一些新的需求,下一步完善和研究工作將重點關注基于狀態驅動的智能體研究和人群逃散的數字化模擬。
[1]易濤,楊義.化工安全虛擬現實仿真系統的設計與實現[J].計算機與應用化學,2006,23(1):49-54.
[2]鄭云棟,王欣捷,項曙光.高壓加氫裂化裝置仿真培訓系統開發[J].計算機仿真,2010,12(4):320-323.
[3]韓東.基于虛擬現實技術的大型儲罐區滅火救援場景的構建[J].防災科技學院學報,2010,12(1):93-96.
[4]金鉞,侯文君.基于虛擬手簡化面法向距離的抓取碰撞檢測算法[J].中國機械工程,2008,19(4):1068-1071.
[5]張鑫,王章野,王作省.人體運動建模的實時逆運動學算法[J].計算機輔助設計與圖形學報,2009,21(6):853-860.
[6]韓流,劉振俠,呂亞國,等.基于虛擬現實技術的航空渦扇發動機仿真系統[J].計算機仿真,2009,26(12):57-61.
[7]陳學文,劉玉慶,朱秀慶,等.基于虛擬現實的太空操作仿真技術研究[J].系統仿真學報,2011,23(3):516-521.
[8]李澍,劉毅,王念東.虛擬環境中的多手指抓取操作技術[J].計算機輔助設計與圖形學學報,2010,22(10):1728-1733.
[9]Wang Niniane.Realistic and fast cloud rendering[J].Journal of Graphics Tools,2004,9(3):21-40.
[10]李綱,李輝.GPU上的實時三維云仿真[J].系統仿真學報,2009,21(23):7511-7514.
[11]胡玥,高慶獅,劉宏嵐.一種優化 BITONIC算法:“并行-優化-串行”合并和分類向量算法[J].計算機研究與發展,2002,10(3):1307-1316.
[12]顧偉.OpenGL幾何著色器研究[J].中國科技信息,2008(20):113-115.
猜你喜歡
中小學教師培訓(2022年10期)2022-10-15 02:16:04
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
辦公室業務(2020年18期)2020-09-29 12:15:58
家庭影院技術(2020年6期)2020-07-27 01:37:42
裝備制造技術(2019年12期)2019-12-25 03:06:46
勞動保護(2019年7期)2019-08-27 00:41:26
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45