深松整地作業自動鑒別系統
2014-10-09 10:50:46哈爾濱工業大學信息技術研究所信息工程系黑龍江省農業委員會農業機械化管理局
河北農機 2014年9期
1、哈爾濱工業大學信息技術研究所、信息工程系 2、黑龍江省農業委員會農業機械化管理局
1 引言
土壤深松是保護性耕作的重要技術環節之一[1]。土壤深松是指使用深松機,松碎耕作層以下5~15 cm的犁底層,使松土層的厚度加深。深松主要由不同的動力機械配套相應的深松機械來完成。
在農業生產中,深松能疏松土壤、打破土壤犁底層、提高土壤蓄水能力、抗旱排澇、排除鹽堿、減小耕作阻力、增強雨水入滲速度和數量、減少徑流,并且不擾亂地表耕作層[2,3]。土壤的蓄水能力提高后,為農作物提供了更多的天然降水資源;打破土壤犁底層后,能有效地提高土壤的透水、透氣性能。因此深松能極大地改善土壤的循環使用狀況,為作物生長發育創造了適宜的土壤條件,使得土壤變得適宜作物生長發育、根系深扎,成為真正的“沃土”,從而達到保護耕地、農作物增產的最終目的。經過黑龍江省試驗測定,深松整地是提高糧食產量的有效途徑,在深松當年,作物產量可增加8-10%,次年可增加10-20%。盡管深松整地對耕地的益處已經成為共識,但在實際操作中,農機大戶、家庭農場、個人農機的機械力量有限,土地面積有限,深松成本高使得這一技術的推廣應用受到一定限制;另一方面,傳統的人工深松整地檢測需要消耗大量的人力、財力、物力并且無法實現全面檢測,也給深松整地的推廣造成了一定的困難。
21世紀的農業發展將告別傳統的粗獷式發展,迎來精準農業時代[4]。哈爾濱工業大學信息技術研究所、信息工程系在黑龍江省農業委員會農業機械化管理局的大力支持下,經歷3年攻關,克服多項技術難題,在全世界范圍內首次實現了農機深松作業精確探測,下面對該系統進行簡介。
2 系統工作方式與原理簡介
農機深松探測系統是一種基于多傳感器多源信息融合與決策方法的系統。首先,根據農機深松時功率大、油耗高、阻力大、行駛速度低等特點,綜合當地土壤土質、含水量等因素,判斷出疑似進行深松作業的農機;然后通過安裝在農機上的攝像頭采集的圖像,判斷農機是否在進行深松作業,并判斷出土壤土質及含水量信息,計算出農機深松深度;最后根據基于單目視覺的可見光圖像深松深度精確測量技術,對計算出的農機深松深度進行校正,得到較為精確的農機深松深度。
在進行農機疑似深松作業判別時,需要通過功率傳感器獲得農機作業的實時功率信息,通過加速度傳感器獲取農機作業時的加速度信息。農機深松探測系統通過以上信息協同,判斷出疑似進行深松作業的農機,然后進行下一步的判斷。在進行農機深松深度的精確測量時,需要通過攝像頭采集的圖像判斷農機是否在進行深松作業,通過圖像傳感器判斷出土壤的土質以及土壤濕度信息。計算出農機深松的深度,并通過攝像頭成像的原理,采用基于單目視覺可見光圖像高度測量技術,對計算出的農機深松深度值進行進一步校正,得到較為精確的農機深松深度。農機深松探測系統的工作方式如圖1所示。
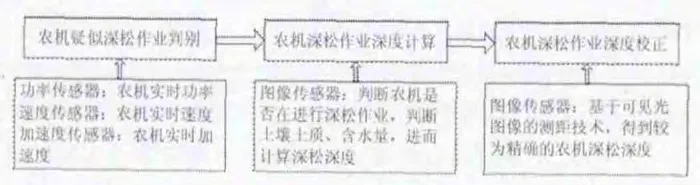
圖1 農機深松探測系統工作方式簡介
3 相關技術簡介
由于農機在進行深松作業時,具有大功率、高油耗、低速度的特點,這里采用功率傳感器采集農機作業時的實時功率,采用速度傳感器采集農機的實時行駛速度作為判斷依據;由于板結土層的土壤結塊,阻力巨大,農機呈現“震蕩式前進”的特點,速度慢但飄忽不定,這里采用加速度傳感器采集農機作業時的實時加速度作為另一個判斷依據。由以上因素綜合判斷,檢測出疑似進行深松作業的農機,然后進行下一步的判斷。
對于疑似進行深松作業的農機,利用安裝在農機上的攝像頭采集的圖像來判斷農機是否在進行深松作業。
將拍攝的照片經過特征提取,利用特征信息進行建模,根據建立的模型可以測出土壤的含水率。
攝像頭采集到的圖像信息,采用基于小波變換特征提取和S V M分類算法的土壤土質識別方法,判斷出農田土壤土質。綜合以土壤的含水率、土質以及農機發動機的功率、加速度信息,可以通過非線性擬合的方法計算出農機深松作業的深度信息,但該方法最終是解一個二次方程,將產生兩個可能的深度解,需要進一步校正確定。
上述方法得到的農機深松深度為兩個可能的值,需要進一步校正,在這里采用了一種基于單目視覺的可見光圖像測距方法,得到了較為精確的農機深松深度信息。該測距方法解決了現有的圖像測量方法設備復雜,計算量大,以及測量誤差大的問題。發明的圖像測距方法通過固定角度的攝像頭采集的圖像,然后,建立圖像中每相鄰兩個像素豎直、水平距離與空間實際距離的一一對應關系,最后通過上述一一對應關系得到圖像中任意兩點之間的實際距離。
通過上述方法可以測得較為準確的農機深松深度信息,作為對前述兩個可能深度的校正。
4 農機深松作業面積計算
本文介紹的農機深松探測系統,可以通過兩種方式求得農機深松的作業面積;一種是通過農機的作業幅寬乘以農機的作業里程,直接得到作業面積。另一種是基于GPS—GPRS的農機作業臨近點矩形累加面積測量方法。方法一需要現場測量農機的作業幅寬,因此,本節重點介紹第二種方法。
基于GPS—GPRS的農機作業臨近點矩形累加面積測量方法,涉及GPS測量和GPRS傳輸領域,它解決了現有農機作業面積測量方法實時性較差、效率低的問題。其方法:首先將農機GPS定位信息每隔一定時間通過GPRS網絡傳輸至服務器數據庫;然后,對數據庫中農機軌跡數據進行初步處理并過濾;最后,對過濾后的數據信息進行進一步處理,除去非作業點(即農機往返于作業區途中的軌跡點),保留作業點,將連續兩作業點按矩形展開,經累加獲得農機作業面積。
結論
土壤實現機械深松正在變為一種使糧食增產最有效、先進的技術耕作制度而被人們認識和認可,更是保持耕地糧食產量可持續發展、確保我國糧食安全的重要舉措。本文介紹的農機深松探測系統,對農機深松整地進行作業狀態實時精確測量統計,是我國農業現代化、信息化發展過程中的一大進展。
[1]朱瑞祥,張軍昌等.保護性耕作條件下的深松技術試驗[J].農業工程學報,2009,(06).
[2]秦紅靈,高旺盛等.兩年免耕后深松對土壤水分的影響[J]中國農業科學.2008,(01).
[3]宮秀杰,錢春榮等.深松免耕技術對土壤物理性狀及玉米產量的影響[J]玉米科學.2009,(05).
[4]趙春江.對我國未來精準農業發展的思考[J].2010,(04).
猜你喜歡
中學生數理化·七年級數學人教版(2020年11期)2020-12-14 06:59:52
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
藝術品鑒證.中國藝術金融(2018年8期)2019-01-14 01:14:28
藝術品鑒證.中國藝術金融(2018年10期)2019-01-08 02:44:26
藝術品鑒證.中國藝術金融(2018年12期)2018-08-26 06:03:48
中華手工(2017年2期)2017-06-06 23:00:31
故事大王(2016年7期)2016-09-22 17:30:08
中外會展(2014年4期)2014-11-27 07:46:46
兒童故事畫報(2013年3期)2013-06-24 05:40:30
小哥白尼·軍事科學畫報(2009年9期)2009-09-14 03:18:56
