基于格型陷波器和Hilbert變換的科里奧利質(zhì)量流量計信號處理方法
2014-09-28 01:13:38蔡選憲
電子器件 2014年1期
林 偉,蔡選憲
(福州大學(xué)福建省微電子集成電路重點實驗室,福州350002)
基于格型陷波器和Hilbert變換的科里奧利質(zhì)量流量計信號處理方法
林 偉*,蔡選憲
(福州大學(xué)福建省微電子集成電路重點實驗室,福州350002)
采用格型陷波器濾波和hilbert變換方法處理科里奧利質(zhì)量流量計傳感器的信號,能夠精確的計算相位差。該方法將自適應(yīng)格型濾波器和Hilbert變換結(jié)合起來,首先對信號進行濾波,得到的增強信號與其Hilbert變換通過三角運算得出相位差的時間函數(shù),從而計算出相位差。仿真結(jié)果表明:該方法計算速度快,實時性好,無需預(yù)知信號頻率,并且測量精度高,能夠檢測出相位差的微小變化。
科氏流量計;相位差;格型陷波器;Hilbert變換
科里奧利質(zhì)量流量計(以下簡稱科氏流量計),是一種可以直接實現(xiàn)質(zhì)量流量測量并可以同時獲取流體密度值的流量計。科氏流量計是當前發(fā)展最為迅速的質(zhì)量流量計之一,具有廣闊的應(yīng)用前景。它的測量原理是通過檢測兩路傳感器輸出的同頻振動信號相位差計算流體質(zhì)量流量。在實際應(yīng)用中,科氏流量計信號呈現(xiàn)時變特性[1-2],需要對動態(tài)相位差實時且持續(xù)準確地跟蹤測量,以提高測量精度。目前,應(yīng)用于科氏流量計相位差測量的數(shù)字信號處理方法主要有:基于離散傅里葉變換(DFT)的方法[3]、基于自適應(yīng)譜線增強(ALE)的方法[4]、基于數(shù)字鎖相環(huán)的方法[5]、基于正交解調(diào)的方法[6-8]和計及負頻率影響的滑動DTFT算法(SDTFT)[9]。但是這些方法均存在一些不足,例如離散傅里葉變換(DFT)方法由于非整周期采樣時,DFT的計算精度誤差不能滿足儀器要求;自適應(yīng)譜線增強(ALE)方法在計算相位差過程中存在較長的收斂過程,系統(tǒng)實時性有待提高;文獻[9]提出SDTFT算法在計算時考慮到負頻率的影響,提高精度和減小計算量,但是由于運算過程中存在迭代過程,持續(xù)跟蹤精度有待提高,而且需預(yù)知信號頻率,預(yù)知頻率的精度對相位差測量精度有較大影響。
為此,本文提出一種新的科氏流量計信號處理方法,即科氏流量計信號經(jīng)過格型陷波器濾波降噪后得到增強信號,通過Hilbert變換計算兩路信號之間的相位差。該方法在Hilbert變換過程中無迭代運算,不存在收斂過程,無需預(yù)知信號基頻,測量精度高,能過檢測出微小相位差的變化。
1 信號模型
為了更真實的描述科氏流量計信號的特性,文獻[1]以隨機游動模型RWM(Random Walk Model)模擬科氏流量計信號:

式中:e(n)是零均值、方差為1的白噪聲。幅值A(chǔ)(n)、歸一化頻率ω(n)和相位φ(n)按照隨機游動模型變化:
其中:eA(n)、eω(n)和eφ(n)均為零均值、方差為1,互不相關(guān)的白噪聲,σA、σω和σφ分別控制eA(n)、eω(n)和eφ(n)的變化幅度。
2 基于格型陷波器和Hilbert變換的信號處理方法
2.1 方法概述
本文方法是基于格型陷波器濾波降噪和Hilbert變換計算科氏流量計相位差,如圖1所示,兩路科氏流量計信號首先經(jīng)過采樣量化,通過格型陷波器濾波降噪之后得到增強信號;然后增強信號與其Hilbert變換的信號進行三角運算,得到僅關(guān)于相位差的時間函數(shù),經(jīng)過反正切運算后計算出科氏流量計信號相位差。
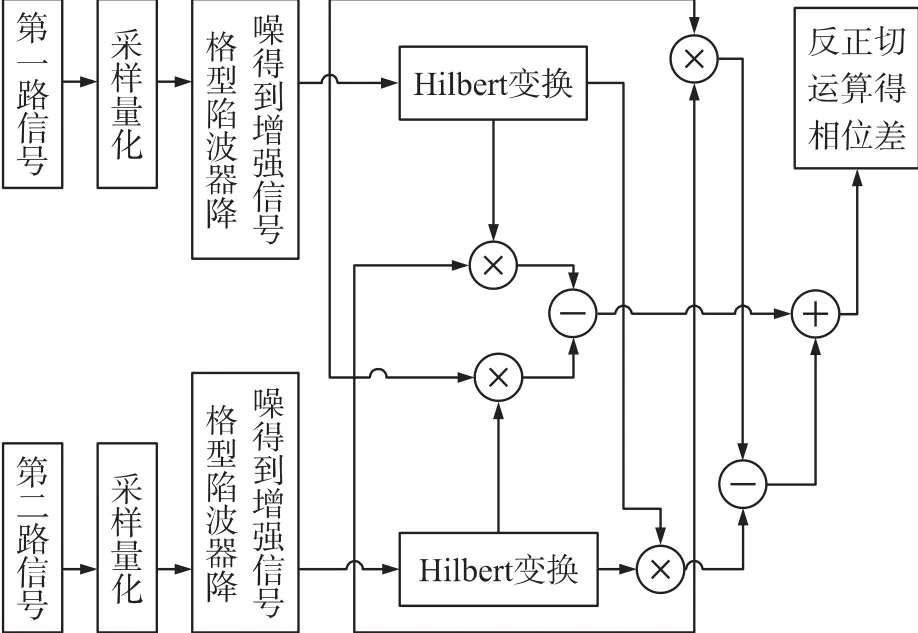
圖1 基于格型濾波器和Hilbert變換的相位差測量方法
2.2 自適應(yīng)格型陷波器濾波降噪
本文研究的是自適應(yīng)格型IIR陷波器[10],圖1所示為一種級聯(lián)的全極點和全零點格型陷波器,其傳遞函數(shù)為:

式中:k0為陷波頻點,α為陷波帶寬的參數(shù),一般設(shè)定在0<α<1區(qū)間,α的值越接近于1,則帶寬越窄,陷波作用越理想。同時為了使濾波器穩(wěn)定,取|k0|<1。k0在經(jīng)過一段時間自適應(yīng)后應(yīng)該收斂到-cosω,ω是科氏流量計傳感器輸入信號的歸一化頻率。自適應(yīng)算法如下[11]:
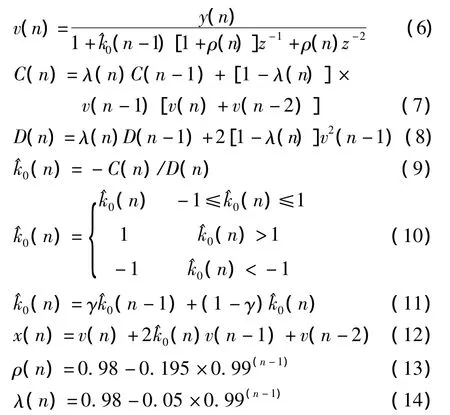
其中:v(n)為中間變量,x(n)是濾波器的輸出信號,^k0(n)是k0的估計值,式(10)與式(11)對^k0(n)分別做約束和平滑處理,γ=0.5。y(n)-x(n)即為去噪后的增強信號。
2.3 相位差計算
Hilbert變換具有90°相移性質(zhì),通過對科氏流量計傳感器信號與其Hilbert變換的三角運算,可以得到關(guān)于相位差的時間函數(shù),從而計算出相位差。原理如下[12-14]:
設(shè)科氏流量計的兩路輸出信號為:

式中:A(t)為信號的幅值,θ1(t)、θ2(t)為相位,ω= 2πf/fs為角頻率。兩路信號的Hilbert變換為:

由正切函數(shù)和差化積公式有:
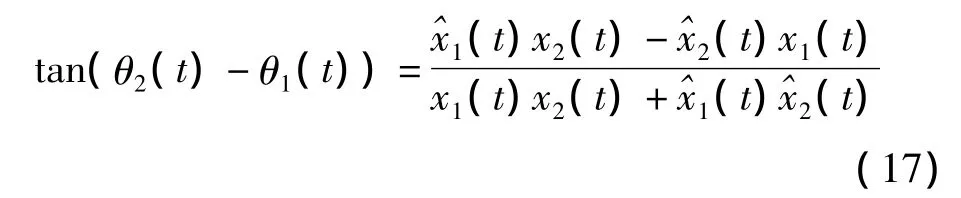
對上式進行反正切運算即可求得相位差。Hilbert變換具有連續(xù)性和瞬態(tài)性,能計算每個采樣點的相位差,無需預(yù)知信號頻率,可實現(xiàn)相位差高精度實時測量并計算出信號間的時間差。
2.4 實現(xiàn)步驟
本文方法實現(xiàn)步驟如下:
(1)將科氏流量計傳感器輸出信號采樣,設(shè)為x(n),n=1,2,…,N,N為被測數(shù)據(jù)的長度;
(2)使用格型陷波器對信號進行濾波降噪,得到降噪后的兩路增強信號x1(n),x2(n);
(4)按式(17)計算出相位差的正切函數(shù),其反正切運算后得到科氏流量計信號相位差的估計值,繼而可求得時間差估計值。
以上算法的流程如圖2所示。
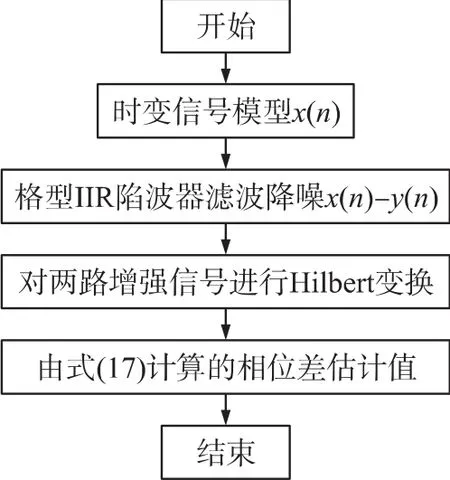
圖2 信號處理方法實現(xiàn)流程
3 仿真分析
3.1 仿真參數(shù)設(shè)置
使用MATLAB軟件對本文提出的方法進行計算機仿真驗證。采用隨機游動模型模擬科氏流量計傳感器輸出信號,同時采用SDTFT作為對照,分析方法的測量精度、初始相位差影響。單次仿真取20 000個采樣點,參數(shù)設(shè)置如表1所示。
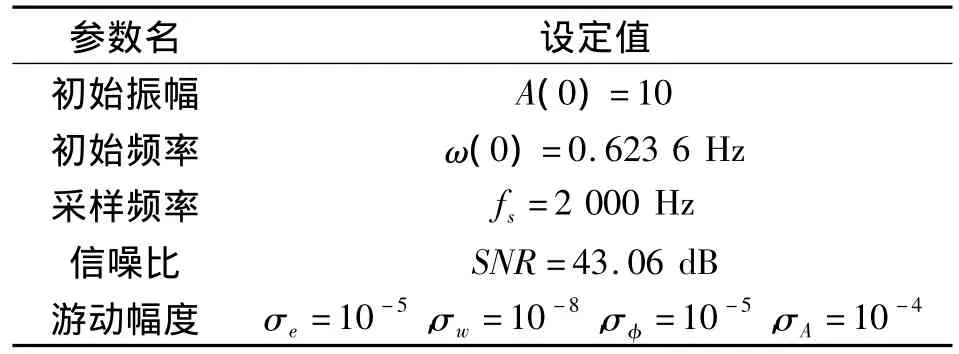
表1 仿真初始化參數(shù)
3.2 濾波特性分析
本文采用的格型陷波器進行濾波降噪,原始信號與增強信號如圖3所示,該方法在300個采樣點附近達到穩(wěn)定。由圖3可知,格型陷波器有較高的運算速度,有利于信號的實時處理,且增強信號很好的保留了原信號的特征。
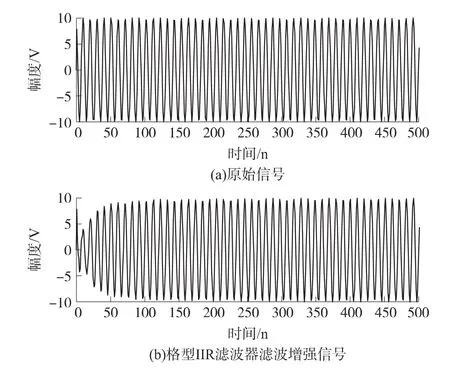
圖3 濾波增強信號與原始信號的比較
3.3 測量精度和初始相位差影響分析
分別采用SDTFT和本文方法,通過MATLAB仿真,對結(jié)果進行分析對比。圖4給出了SDTFT和本文方法的相位差檢測結(jié)果。由圖3可知兩種方法都能夠有效的進行相位差跟蹤計算,本文方法的跟蹤、計算精度高于SDTFT方法,這是因為SDTFT方法有迭代運算,誤差累積,而本文方法不存在迭代運算,因此可以保持較高精度。
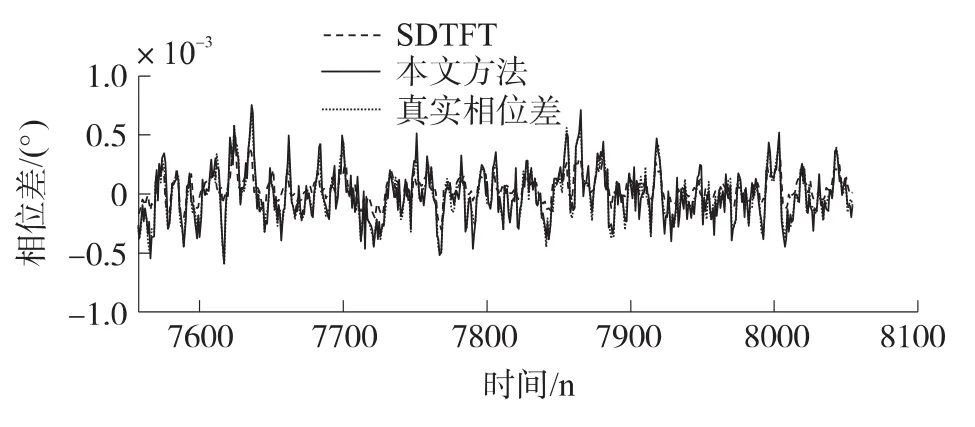
圖4 相位差跟蹤檢測結(jié)果
表2給出了SDTFT和本文方法在不同初始相位差條件的MATLAB仿真結(jié)果和測量誤差對比,由表2可知,在不同初始相位差條件下,本文方法的測量精度明顯高于SDTFT,相對誤差降低近兩個數(shù)量級,均方誤差降低大約一個數(shù)量級,且相對誤差與軍方誤差不隨初始相位差變化而呈規(guī)律性變化。
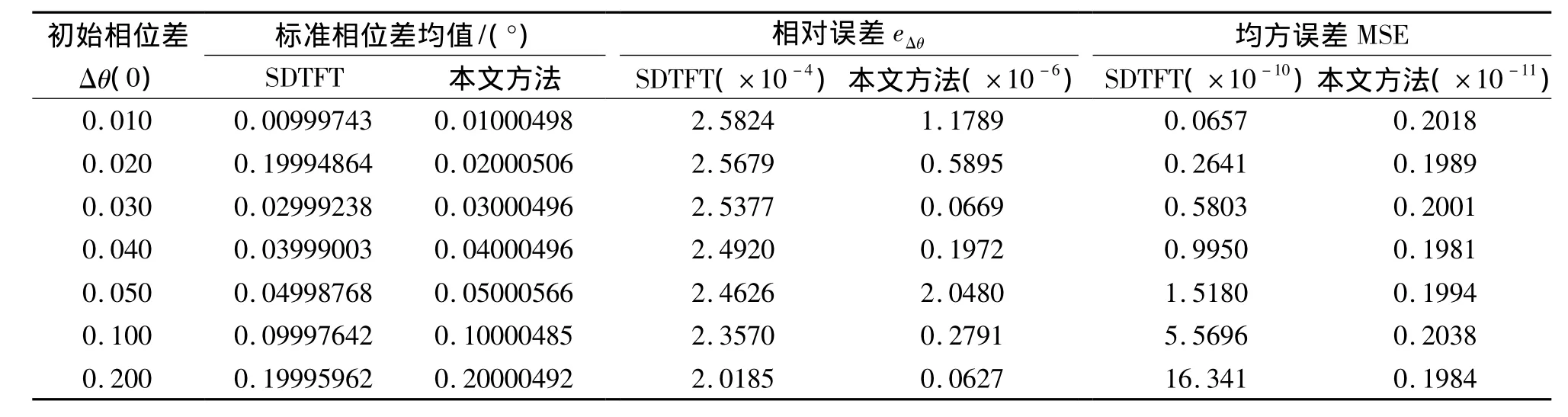
表2 不同初始相位差條件下的測量結(jié)果及測量誤差
4 結(jié)論
本文提出基于格型濾波器和Hilbert變換的科氏流量計相位差測量方法,給出了實驗步驟及流程,進行了MATLAB仿真,分析對比SDTFT和本文方法的測量精度和初始相位差影響。采用Hilbert變換算法計算科氏流量計信號的相位差時,無需預(yù)知信號頻率,縮短了得到增強信號的計算,收斂時間,有利于算法的實時跟蹤;測量精度高于SDTFT,能夠較好的跟蹤檢測出相位差變化,因而可用于科氏流量計的實時信號處理,具有較強的實用性。
[1]倪偉,徐科軍.基于時變信號模型的科里奧利質(zhì)量流量計信號處理方法[J].儀器儀表學(xué)報,2005,26(4):358-364.
[2]楊輝躍,涂亞慶,張海濤.基于ANF和VS-DFE的科氏流量計頻率跟蹤方法[J].電子測量與儀器學(xué)報,2011,25(12):1072 -1077.
[3]Paul Romano.Coriolis Mass Flow Rate Meter Having a Substantially Increased Noise Immunity[P].USPatent,4934196,Jun.19.1990.
[4]Nam Ik Cho,Chong-Ho Choi,Sang Uk Lee.Adaptive Line Enhancement by Using an IIR Lattice Notch Filter[J].Signal Processing,1989,37(4):585-589.
[5]Freeman B.Digital Phase Locked Loop Signal Prcessing for Coriolis Mass Flow Meter[P].USPatent,5804741,Sep.8.1998.
[6]Dietmar Stadler.Measurement and Operation Circuit of a Coriolistype Mass Flow Meter[P].USPatent,6073495,March.16.1998.
[7]Manus PHenry.DigitalMeasurement[P].USPatent,20020038186,Mar.28.2002.
[8]Henrot Denis.Multi-rate Digital Signal Processor for Vibrating Conduit Sensor Signals[P].WIPO Patent,WO0101083,January.4.2001.
[9]Shen Ting’sao,Tu Yaqing,Zhang Haitao.A Novel Method for CMF Signal Processing Based on the Revised Sliding Recursive DTFT Algorithm[C]//24th Chinese Control and Decision Conference,2012:3311-3316.
[10]Cho N I,Lee SU.Tracking Analysis of an Adaptive Lattice Notch Filter[J].IEEE Trans.Circuits Syst,vol.42,no 3,Mar.1995: 186-195.
[11]徐科軍,倪偉,陳智淵.基于時變信號模型和格型陷波器的科氏流量計信號處理方法[J].儀器儀表學(xué)報,2006,27(6): 596-601.
[12]楊文獻,任興民,姜節(jié)勝.基于奇異熵的信號降噪技術(shù)研究[J].西北工業(yè)大學(xué)學(xué)報,2001,19(3):368-271.
[13]楊輝躍,涂亞慶,張海濤.基于hilbert變換的相位差測量法分析及改進[J].四川兵工學(xué)報,2011,32(1):107-109,134.
[14]楊輝躍,涂亞慶,張海濤等.一種基于SVD和Hilbert變換的科氏流量計相位差測量方法[J].儀器儀表學(xué)報,2012,33(9): 2101-2107.
Phase Difference M easuring M ethod Based on Adaptive Lattice Notch Filter and Hilbert Transform for Coriolis M ass Flowmeter
LINWei*,CAIXuanxian
(Fujian Key Laboratory of Microelectronicsand Integrated Circuits,F(xiàn)uzhou University,F(xiàn)uzhou 350002,China)
A high-precision phase differencemethod for Coriolismass flowmeter is proposed,which is based on adaptive lattice notch filter with noise-reduction and Hilbert transform.In thismethod,noise-reduction is performed on the original signal firstily.Then,the phase difference time function is observed from the enhanced signal and its Hilbert transform with trigonometric operation;therefore,the phase difference obtained.Simulation results show that themethod has highly computing speed and real-time,and thismethod does not need to know the signal frequency; beside themethod has high measurement accuracy and can detect tiny phase difference change.
coriolismass flowmeter;adaptive lattice notch filter;phase difference;Hiltert transform
10.3969/j.issn.1005-9490.2014.01.016
TM 814.6 文獻標識碼:A 文章編號:1005-9490(2014)01-0063-04
2013-05-10修改日期:2013-06-05
EEACC:7320W;6140
林 偉(1968-),男,博士,副研究員,碩士生導(dǎo)師,主持和參加了12項科研項目,主要有:“平板顯示驅(qū)動芯片的設(shè)計”、“數(shù)字調(diào)諧芯片的研制”等。先后在國內(nèi)外專業(yè)雜志發(fā)表了46篇論文,其中6篇為EI收錄;


蔡選憲(1990-),男,漢族,福建仙游人,福州大學(xué)碩士研究生,現(xiàn)從事嵌入式、數(shù)字信號處理方面研究,caixuanxian @sina.com。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
中學(xué)生數(shù)理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學(xué)生數(shù)理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
電子制作(2018年11期)2018-08-04 03:25:42
中學(xué)生數(shù)理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
Coco薇(2016年2期)2016-03-22 02:42:52
少兒科學(xué)周刊·兒童版(2016年1期)2016-03-14 03:52:21
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
Coco薇(2015年1期)2015-08-13 02:47:34
