一種電動(dòng)腰頸部鍛煉裝置的設(shè)計(jì)與分析
2014-09-19 08:36:56徐光遠(yuǎn)陶衛(wèi)軍潘國義孫明亮
機(jī)械制造與自動(dòng)化 2014年6期
關(guān)鍵詞:康復(fù)
徐光遠(yuǎn),陶衛(wèi)軍,潘國義,孫明亮
(南京理工大學(xué)機(jī)械工程學(xué)院江蘇南京210094)
0 前言
由于工作壓力大、長時(shí)間伏案工作或身體機(jī)能退化而導(dǎo)致的腰背部和肩頸部不適或病痛,在職場(chǎng)人員和中老年人群中越來越呈現(xiàn)擴(kuò)大發(fā)展趨勢(shì),已成為影響人們工作生活的一種常見多發(fā)病[1,2]。針對(duì)這一現(xiàn)狀,非常有必要來開發(fā)具有腰背部和肩頸部健康增進(jìn)功能的康復(fù)裝置,對(duì)腰背部和肩頸部進(jìn)行疾病預(yù)防和輔助治療。
目前,在腰背部康復(fù)裝置的研究方面已有一些研究成果,其中楊劍雪等人開發(fā)的腰部助動(dòng)康復(fù)器[3]、王克義等開發(fā)的繩索牽引康復(fù)機(jī)器人[4]和李先花等人開發(fā)的扭腰康復(fù)訓(xùn)練機(jī)[5]主要通過機(jī)構(gòu)促使腰部運(yùn)動(dòng)來鍛煉腰背部肌肉,但其機(jī)構(gòu)運(yùn)動(dòng)限于一維空間,導(dǎo)致其僅對(duì)部分腰背部肌肉群具有鍛煉效果;日本學(xué)者Youichi Shinomiya等人[6~8]基于乘馬療法的原理開發(fā)了一種基于Staward并聯(lián)機(jī)構(gòu)平臺(tái)的乘馬療法器械,通過機(jī)構(gòu)的三維運(yùn)動(dòng)對(duì)腰背部肌肉進(jìn)行全面鍛煉并進(jìn)行了大量的實(shí)驗(yàn)驗(yàn)證。在肩頸部康復(fù)裝置的研究方面,現(xiàn)有技術(shù)主要采用運(yùn)動(dòng)按摩的原理,已有不少相應(yīng)產(chǎn)品得到實(shí)際應(yīng)用[9,10]。
針對(duì)腰肩疾患多發(fā)這一現(xiàn)狀,從綜合解決腰背部和肩頸部的康復(fù)鍛煉問題出發(fā),提出了一種同時(shí)具備腰背部乘馬式療法康復(fù)鍛煉功能和肩頸部按摩式康復(fù)鍛煉功能的新型電動(dòng)腰頸部鍛煉裝置,并對(duì)機(jī)械結(jié)構(gòu)和控制系統(tǒng)進(jìn)行了設(shè)計(jì),在分析其機(jī)構(gòu)運(yùn)動(dòng)學(xué)的基礎(chǔ)上對(duì)腰背部鍛煉效果評(píng)估方法進(jìn)行研究,并通過制作的樣機(jī)進(jìn)行了基礎(chǔ)的驗(yàn)證實(shí)驗(yàn)。
1 方案與工作原理
從方便家庭和辦公環(huán)境使用出發(fā),考慮結(jié)合常用靠椅的功能來開發(fā)這一同時(shí)具有腰背部鍛煉功能和肩頸部按摩功能的新型電動(dòng)鍛煉裝置。其中:肩頸部鍛煉功能模塊設(shè)置在靠椅的靠背上、并由一臺(tái)電機(jī)通過偏心輪驅(qū)動(dòng)機(jī)構(gòu)實(shí)現(xiàn)對(duì)肩頸部的按摩功能;當(dāng)將靠椅的靠背折疊至與椅面重合的位置后,由另一臺(tái)電機(jī)通過組合機(jī)構(gòu)驅(qū)動(dòng)靠背進(jìn)行空間三維運(yùn)動(dòng)來實(shí)現(xiàn)基于乘馬療法的腰背部鍛煉功能。使用者用作靠椅、進(jìn)行肩頸部按摩和使用腰背部鍛煉功能時(shí)的裝置狀態(tài)分別如圖1(a)-(c)所示。

圖1 整體設(shè)計(jì)方案
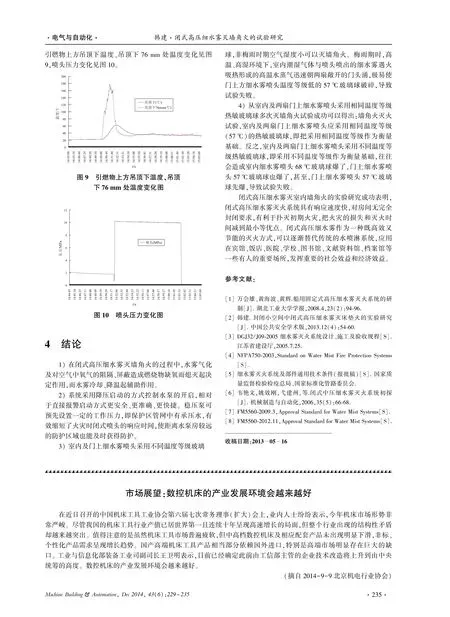
肩頸部按摩機(jī)構(gòu)設(shè)置在靠椅的正面,如圖2(a)所示。步進(jìn)電機(jī)1通過齒輪組1驅(qū)動(dòng)軸1旋轉(zhuǎn)并帶動(dòng)軸1上固定安裝的一對(duì)偏心輪轉(zhuǎn)動(dòng),偏心輪每轉(zhuǎn)一周其輪緣伸出并按摩靠在靠背正面使用者的肩頸部一次。其按摩頻率和速度可通過控制步進(jìn)電機(jī)的轉(zhuǎn)速來實(shí)現(xiàn)。
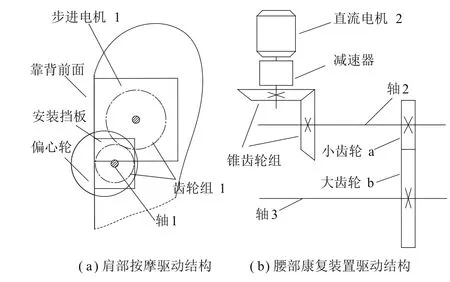
圖2 驅(qū)動(dòng)結(jié)構(gòu)原理圖
腰背部鍛煉機(jī)構(gòu)設(shè)置在椅面下方,由直流電機(jī)2經(jīng)減速器和錐齒輪組把旋轉(zhuǎn)運(yùn)動(dòng)傳遞給軸3,如圖2(b)所示。此時(shí),靠背經(jīng)向椅面折疊后可讓使用者乘坐,軸3每旋轉(zhuǎn)一周整個(gè)靠背會(huì)按設(shè)定曲線擺動(dòng)一次,結(jié)構(gòu)原理如圖3(a)所示。同時(shí),整個(gè)靠背、曲柄搖塊機(jī)構(gòu)及軸3,在軸3上曲柄b的驅(qū)動(dòng)下,繞機(jī)架法線左右擺動(dòng),結(jié)構(gòu)原理如圖3(b)所示。將曲柄a和曲柄b單獨(dú)作用引起的前后移動(dòng)和上下擺動(dòng)與左右擺動(dòng)進(jìn)行運(yùn)動(dòng)合成,即可得到類似橫‘8’字的運(yùn)動(dòng)軌跡。椅背背面沿此三維軌跡曲線運(yùn)動(dòng)時(shí)會(huì)使騎坐在上面的使用者在維持身體平衡的過程中下意識(shí)地使用腰背部肌肉,從而達(dá)到鍛煉腰背部肌肉的效果。這種腰背部肌肉鍛煉類似乘馬療法中使用者乘馬行走時(shí)得到的效果。

圖3 運(yùn)動(dòng)系統(tǒng)結(jié)構(gòu)簡(jiǎn)圖
2 運(yùn)動(dòng)學(xué)分析
2.1 坐標(biāo)系的建立
確定腰背部鍛煉機(jī)構(gòu)由曲柄搖塊機(jī)構(gòu)和空間曲柄擺桿機(jī)構(gòu)的組成后,進(jìn)一步推導(dǎo)椅背背面中心點(diǎn)Q的運(yùn)動(dòng)學(xué)反解。以軸2和空間曲柄擺桿機(jī)構(gòu)的機(jī)架為研究對(duì)象,設(shè)定坐標(biāo)系如圖3(b)所示。其中:基準(zhǔn)坐標(biāo)系ΣO以空間曲柄擺桿機(jī)構(gòu)的機(jī)架中點(diǎn)O為坐標(biāo)原點(diǎn),x軸、y軸正方向分別為靠椅的右方向和前方向;剛體坐標(biāo)系ΣN以空間曲柄擺桿機(jī)構(gòu)的機(jī)架中點(diǎn)為坐標(biāo)原點(diǎn),xN軸、yN軸正方向分別為軸2右方向和前方向。
在基準(zhǔn)坐標(biāo)系中:軸3中點(diǎn)、左點(diǎn)、曲柄b頂點(diǎn)、左支架下點(diǎn)記為 A、B、C、D;各點(diǎn)間距離分別用 rb、l2、l3、l4和 l5表示;OA與x軸正向間夾角記為β;曲柄b與平面xoz間夾角記為 α,其值為 90°+ω2t。
在剛體坐標(biāo)系內(nèi):軸2頂點(diǎn)和滑動(dòng)桿頂點(diǎn)分別用S、P表示;曲柄a和軸2長度記為ra和2l1;曲柄a與豎直方向的夾角記為 θ,其值為 0°+ω1t。
在這里,Q點(diǎn)在剛體坐標(biāo)系ΣN內(nèi)的位置用向量PQd表示,在基準(zhǔn)坐標(biāo)系ΣO內(nèi)的位置用向量PQj表示,兩坐標(biāo)向量之間的轉(zhuǎn)換有:先在基準(zhǔn)坐標(biāo)系內(nèi)的做一個(gè)平移變換,再在剛體坐標(biāo)系內(nèi)繞y軸做角度為β旋轉(zhuǎn)變換,關(guān)系寫出如下:

2.2 曲柄搖塊機(jī)構(gòu)運(yùn)動(dòng)學(xué)分析
單獨(dú)分析曲柄a做角速度為ω1的圓周運(yùn)動(dòng)時(shí),其旋轉(zhuǎn)中心S點(diǎn)始終保持在xN軸上,故S點(diǎn)坐標(biāo)不變,記為(l1,0,0)。從而推出旋轉(zhuǎn)頂點(diǎn)P的坐標(biāo):

在旋轉(zhuǎn)平面內(nèi),Q點(diǎn)的投影為Q',只考慮曲柄搖塊機(jī)構(gòu)運(yùn)動(dòng)時(shí),Q、Q'點(diǎn)的xN軸坐標(biāo)相同并保持不變,如下圖4(a)所示。
在旋轉(zhuǎn)平面內(nèi),分析yN、zN方向的位置關(guān)系有:

依據(jù)圖中θ和γ的關(guān)系:

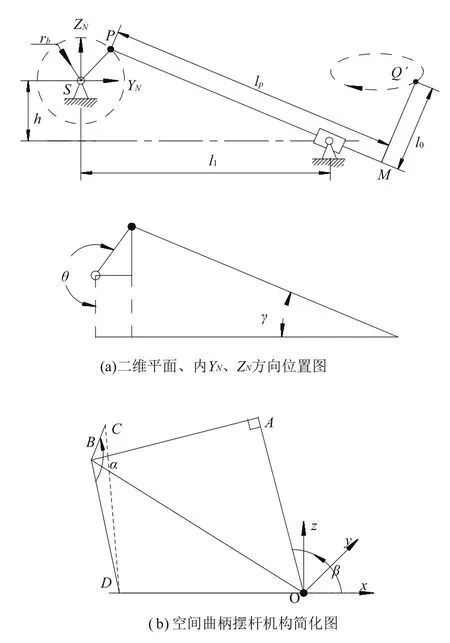
圖4 結(jié)構(gòu)簡(jiǎn)化圖

從而得到剛體坐標(biāo)系ΣN內(nèi)Q點(diǎn)的坐標(biāo):
2.3 空間曲柄擺桿機(jī)構(gòu)運(yùn)動(dòng)學(xué)分析
空間曲柄擺桿機(jī)構(gòu)的驅(qū)動(dòng)結(jié)構(gòu)是一對(duì)勻速圓周運(yùn)動(dòng)的曲柄b,考慮到兩曲柄間相位差為180°,其他機(jī)構(gòu)對(duì)稱,現(xiàn)分析左半部結(jié)構(gòu)的運(yùn)動(dòng)情況,其簡(jiǎn)示圖如圖4(b)所示。
在基準(zhǔn)坐標(biāo)系內(nèi),四邊形AOBD始終保持在xoz平面內(nèi),BC繞AB以ω2的角速度勻速旋轉(zhuǎn),連接BD,推得BC繞AB轉(zhuǎn)過的角度α同為BC與xoz平面間夾角。
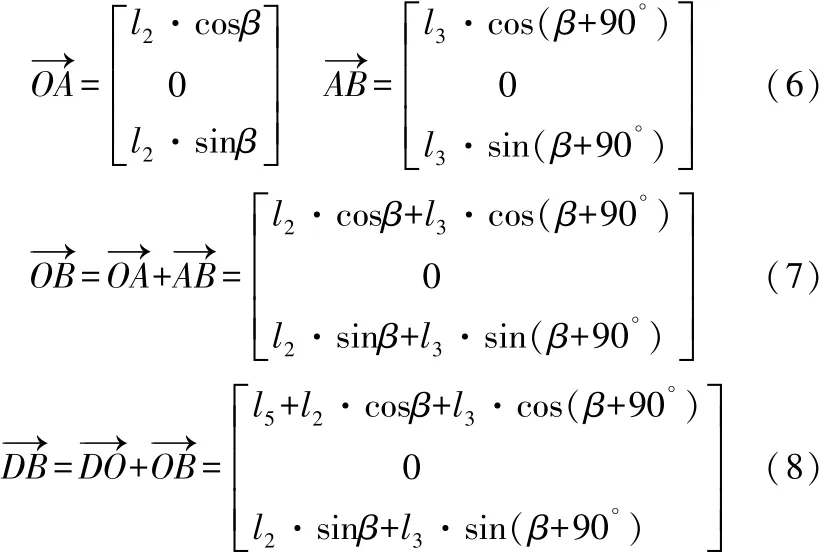
在△BCD,DC為搖桿,其長度l4保持不變。應(yīng)用余弦定理有:

聯(lián)立式(8)、式(9),有:

式(10)中只含有未知量α,其余均為已知量,而α為可用t的函數(shù)表示,故可解得β=f ω2t( )的表達(dá)。
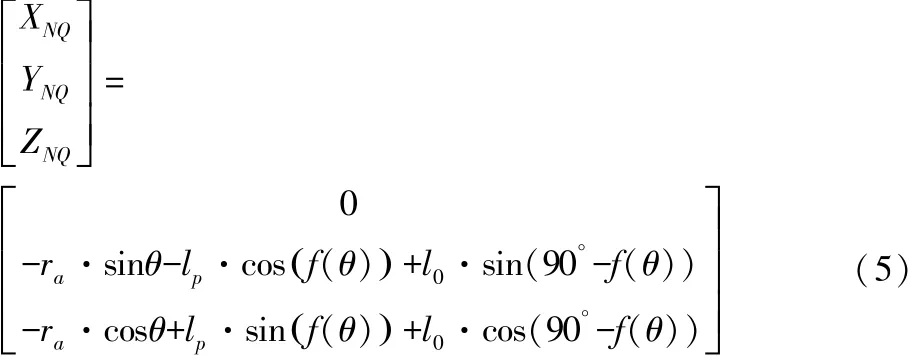
綜上所述,在基準(zhǔn)坐標(biāo)系ΣO內(nèi),椅背背面中心點(diǎn)Q的運(yùn)動(dòng)學(xué)反解:

結(jié)合matalab軟件,對(duì)上述運(yùn)動(dòng)方程進(jìn)行仿真計(jì)算,得到角度β和基準(zhǔn)坐標(biāo)系ΣO內(nèi)Q點(diǎn)坐標(biāo)位置隨時(shí)間的變化如圖5所示。


圖5 運(yùn)動(dòng)變化仿真圖
從圖5仿真結(jié)果得知,該新型腰頸部康復(fù)裝置的運(yùn)動(dòng)基本為對(duì)稱的左右擺動(dòng),其運(yùn)動(dòng)軌跡基本符合空間橫‘8’字曲線,運(yùn)動(dòng)形式與乘馬運(yùn)動(dòng)相近。
3 機(jī)械結(jié)構(gòu)設(shè)計(jì)與分析
3.1 整體結(jié)構(gòu)設(shè)計(jì)
根據(jù)其工作原理,新型電動(dòng)腰頸部康復(fù)裝置總體結(jié)構(gòu)如圖6(a)所示。其主要由底座、腰背部鍛煉機(jī)構(gòu)、椅面、肩頸部按摩機(jī)構(gòu)和靠背組成,腰背部鍛煉機(jī)構(gòu)設(shè)置在椅面下方并安裝在底座上,肩頸部按摩機(jī)構(gòu)設(shè)置在靠背正面、其偏心輪可從靠背正面上的矩形窗口反復(fù)伸縮來對(duì)靠背上使用者的肩頸部進(jìn)行按摩。靠背通過轉(zhuǎn)軸與椅面連接并能繞此轉(zhuǎn)軸折疊至椅面上,靠背從人因工程學(xué)的角度出發(fā)進(jìn)行設(shè)計(jì),其背面為兩端高中間低的波浪形曲面以便折疊后使用者騎坐。
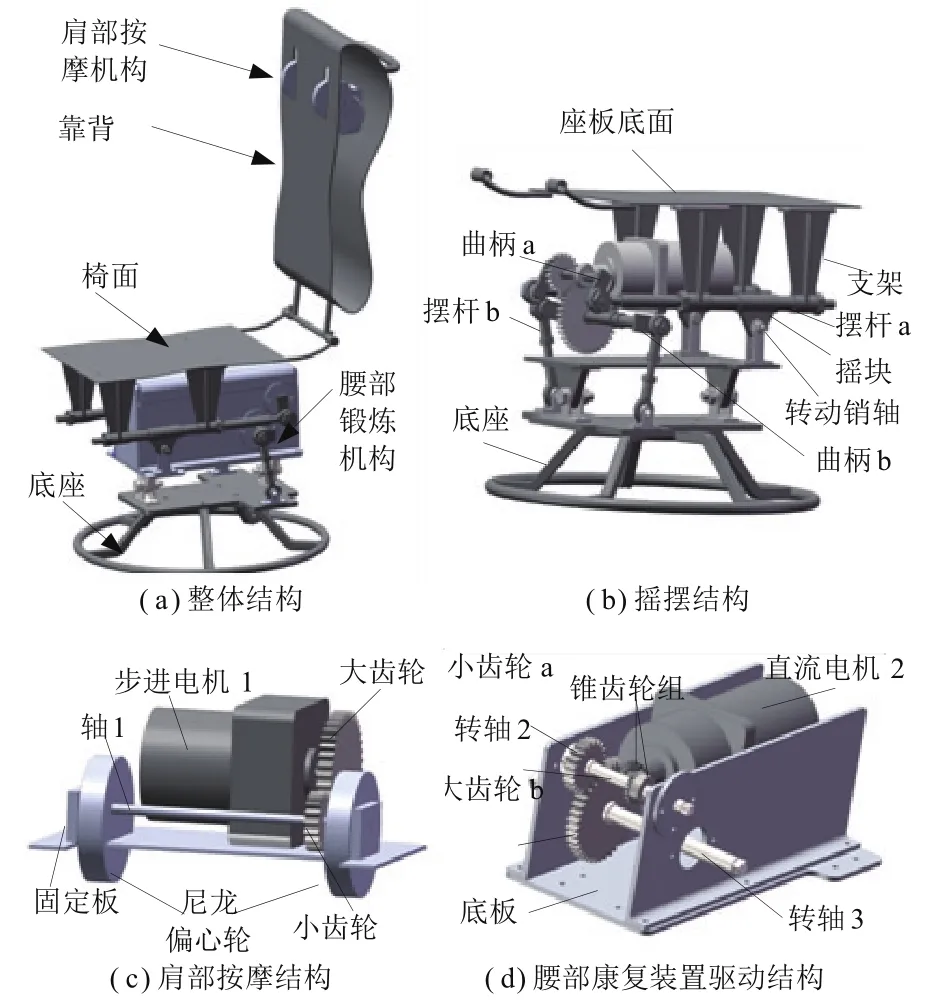
圖6 三維結(jié)構(gòu)圖
3.2 肩部按摩器設(shè)計(jì)
所設(shè)計(jì)的肩頸部按摩機(jī)構(gòu)設(shè)計(jì)成一個(gè)獨(dú)立模塊以便于在靠背上的安裝和高度調(diào)整,其具體結(jié)構(gòu)如圖6(c)所示,主要包括固定板、步進(jìn)電機(jī)、電機(jī)座、小齒輪、大齒輪、轉(zhuǎn)軸、一對(duì)軸承座和一對(duì)偏心尼龍輪,其中步進(jìn)電機(jī)通過電機(jī)座固定在固定板上,其輸出軸上的大齒輪與轉(zhuǎn)軸1上安裝的小齒輪相嚙合,轉(zhuǎn)軸1通過兩側(cè)的一對(duì)安裝在固定板上的軸承座進(jìn)行支撐,一對(duì)偏心尼龍輪固定在轉(zhuǎn)軸1上并在轉(zhuǎn)軸1轉(zhuǎn)動(dòng)時(shí)對(duì)使用者肩頸部進(jìn)行按摩。
3.3 腰部鍛煉機(jī)構(gòu)設(shè)計(jì)
腰背部鍛煉機(jī)構(gòu)可分為動(dòng)力驅(qū)動(dòng)機(jī)構(gòu)、曲柄搖塊機(jī)構(gòu)和空間曲柄擺桿機(jī)構(gòu)。其中動(dòng)力驅(qū)動(dòng)機(jī)構(gòu)由直流電機(jī)2、減速器、機(jī)架、如圖6(d)。轉(zhuǎn)軸2和轉(zhuǎn)軸3旋轉(zhuǎn)分別驅(qū)動(dòng)曲柄搖塊機(jī)構(gòu)和空間曲柄擺桿機(jī)構(gòu)來實(shí)現(xiàn)腰背部鍛煉所需的三維空間運(yùn)動(dòng),具體結(jié)構(gòu)如圖6(b)所示。實(shí)現(xiàn)椅面在前后和上下方向的運(yùn)動(dòng)。空間曲柄擺桿機(jī)構(gòu)同樣有左右分布且曲柄轉(zhuǎn)角相位相差180°的兩組,曲柄搖塊機(jī)構(gòu)和空間曲柄擺桿機(jī)構(gòu)運(yùn)動(dòng)綜合后使得整個(gè)裝置實(shí)現(xiàn)所要求的空間三維運(yùn)動(dòng),以實(shí)現(xiàn)使用者騎坐時(shí)腰背部鍛煉效果。
總結(jié)而言,在機(jī)械結(jié)構(gòu)設(shè)計(jì)方面,該新型腰頸部康復(fù)裝置實(shí)現(xiàn)了一個(gè)電機(jī)多種用途和各機(jī)構(gòu)之間的有效融合。輪椅基本構(gòu)架用鋁合金材料焊接而成,結(jié)構(gòu)緊湊,總體重量較輕,適合在室內(nèi)外使用。
4 控制系統(tǒng)設(shè)計(jì)與效果評(píng)估
4.1 控制系統(tǒng)設(shè)計(jì)
新型電動(dòng)腰頸部鍛煉裝置控制系統(tǒng)包括運(yùn)動(dòng)控制系統(tǒng)和生理信息監(jiān)測(cè)與評(píng)估系統(tǒng)。通過運(yùn)動(dòng)控制系統(tǒng)來控制腰背部鍛煉機(jī)構(gòu)和肩頸部按摩機(jī)構(gòu)的啟動(dòng)和停止,并對(duì)其工作速度進(jìn)行分檔調(diào)節(jié)。其中,腰背部鍛煉機(jī)構(gòu)的工作速度設(shè)置為4檔,對(duì)應(yīng)使用者對(duì)腰背部鍛煉強(qiáng)度的不同要求;而肩頸部按摩機(jī)構(gòu)的工作速度為連續(xù)調(diào)節(jié),可根據(jù)使用者的需求調(diào)整到合適的按摩工作速度。生理信息監(jiān)測(cè)與評(píng)估系統(tǒng)主要通過對(duì)腰背部鍛煉過程中使用者心率變化進(jìn)行監(jiān)測(cè),通過特定算法對(duì)其運(yùn)動(dòng)狀況和消耗能量進(jìn)行分析和評(píng)價(jià),以保證使用者對(duì)腰背部鍛煉功能的合理使用。整個(gè)運(yùn)動(dòng)控制系統(tǒng)基于51系列單片機(jī)系統(tǒng)進(jìn)行開發(fā),其控制系統(tǒng)構(gòu)成如圖7所示。
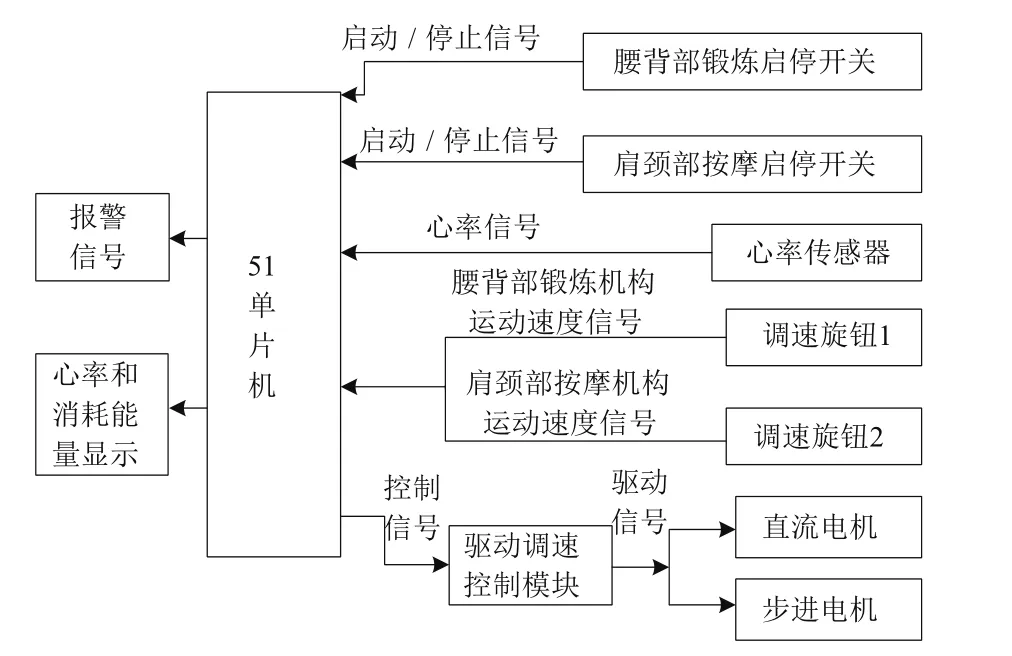
圖7 控制系統(tǒng)構(gòu)成圖
4.2 效果評(píng)估方法
鍛煉效果評(píng)估針對(duì)相對(duì)運(yùn)動(dòng)強(qiáng)度較大的腰背部鍛煉功能,通過監(jiān)測(cè)使用者心率變化來評(píng)估其鍛煉過程中能量消耗情況。研究表明,人體在帶負(fù)載運(yùn)動(dòng)時(shí),其平均能量代謝率隨運(yùn)動(dòng)負(fù)荷的增大而增大,使用者心率變化與所消耗能量間的存在一定相關(guān)性[11,12]。對(duì)腰部康復(fù)鍛煉這種運(yùn)動(dòng)強(qiáng)度適中的類有氧運(yùn)動(dòng)鍛煉過程,可用式(12)進(jìn)行評(píng)價(jià):

其中:W為能量代謝率;a和b為描述其相對(duì)心率與能量代謝率之間變化關(guān)系的參數(shù)。其值大小與男女和年齡等因素相關(guān)。
5 樣機(jī)驗(yàn)證試驗(yàn)
為驗(yàn)證該新型腰頸部康復(fù)裝置的功能效果,從長期坐立的人群中選取研究對(duì)象,選取本校身體經(jīng)過健康體檢的學(xué)生,在已制作好的樣機(jī)上進(jìn)行驗(yàn)證試驗(yàn),如圖8所示。

圖8 樣機(jī)使用示意圖
記錄下被測(cè)試者靜坐時(shí)和開始鍛煉15 min內(nèi)的心率平均數(shù)據(jù),整理如表1,根據(jù)現(xiàn)有的實(shí)驗(yàn)研究結(jié)果,針對(duì)平均年輕為25歲左右的中青年男子,參照相關(guān)計(jì)算公式,取其參數(shù) a=13.9,b=-10.7。
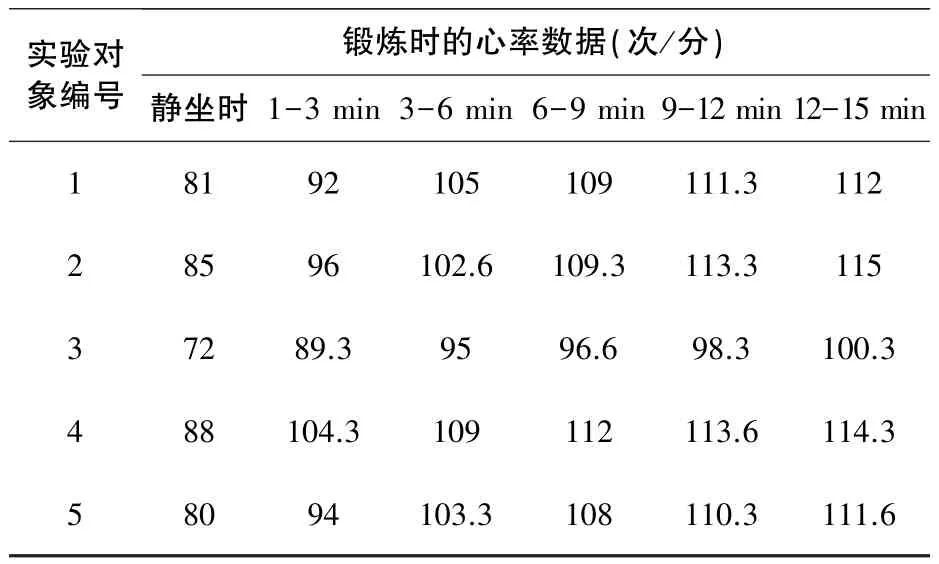
表1 心率數(shù)據(jù)
依據(jù)提出的計(jì)算方法,繪出鍛煉過程中心率和能量的變化曲線圖9,并對(duì)其變化趨勢(shì)進(jìn)行分析:1)在0-6 min內(nèi),每個(gè)鍛煉者心率明顯加速,依據(jù)效果評(píng)估方法計(jì)算的能量數(shù)據(jù),該時(shí)間段內(nèi)鍛煉者的能量代謝呈線性增長;2)在6-15 min內(nèi),實(shí)驗(yàn)者逐步適應(yīng)腰部鍛煉裝置的鍛煉形式,心率趨于平穩(wěn),能量消耗也就維持在一個(gè)相對(duì)穩(wěn)定的水平。

圖9 心率和能量變化曲線
6 結(jié)語
本文設(shè)計(jì)的電動(dòng)腰頸部鍛煉裝置針對(duì)腰背部肩頸部常見疾患,通過機(jī)械設(shè)計(jì)和控制系統(tǒng)設(shè)計(jì)使其能夠同時(shí)具備腰背部乘馬療法式康復(fù)鍛煉功能和肩頸部按摩式康復(fù)鍛煉功能運(yùn)。用Matalab進(jìn)行運(yùn)動(dòng)學(xué)仿真,提出了腰背部鍛煉效果評(píng)估方法進(jìn)行,并通過制作的樣機(jī)進(jìn)行了基礎(chǔ)的驗(yàn)證實(shí)驗(yàn),實(shí)驗(yàn)表明,這種新型電動(dòng)腰頸部鍛煉裝置具有很好的康復(fù)效果。
[1]張濟(jì)川,金得聞.我國康復(fù)醫(yī)學(xué)工程事業(yè)發(fā)展面臨的機(jī)遇和挑戰(zhàn)[J].中國康復(fù)醫(yī)學(xué)雜志,2005,20(4):288-289.
[2]劉合榮,張建國,薛強(qiáng).基于MATLAB的多功能下肢康復(fù)訓(xùn)練輔具的機(jī)構(gòu)運(yùn)動(dòng)分析[J],機(jī)械設(shè)計(jì)與制造,2011,242(04):94-96.
[3]楊劍雪,江迅,姚琰.一種腰部助動(dòng)康復(fù)器的設(shè)計(jì)[J].醫(yī)療衛(wèi)生裝備,2010, 31(12):60-75.
[4]王克義,張立勛,孟浩.1R2T繩索牽引并聯(lián)康復(fù)機(jī)器人繩索彈性研究[J].南京理工大學(xué)學(xué)報(bào)(自然科學(xué)版),2010,4(5):603-607.
[5]李先花.基于人機(jī)工程學(xué)的扭腰康復(fù)訓(xùn)練機(jī)設(shè)計(jì)[D].太原:太原理工大學(xué),2010.
[6]Masakazu K,Masaru N,Mizuho T,et al.Mechanical horseback riding improves insulin sensitivity in elder diabetic patients[J].Diabetes Research and Clinical Practice,2006,(71):124–130.
[7]Youichi S,Takahisa O,Yoshiyuki H,et al.Development and Physical Training Evaluation of Horseback Riding Therapeutic Equipment[J].Proceedings of the 2003 IEE/ASME International Conference on Advanced Intelligent Mechatronics.2003, (02):1239-1243.
[8]三谷保弘,松澤惠美,小林敦郎,等.簡(jiǎn)易型乗馬シミュレータに騎乗時(shí)の身體運(yùn)動(dòng)解析[J]理學(xué)療法科學(xué),2008,23(2)395-402.
[9]武濟(jì)群.頸部和肩部按摩器[P].中國:200720058295.3,2008-9-3.
[10]魏威,祖罡,葉楊.頭頸肩部肌肉功能康復(fù)鍛煉器[P].中國:CN201120450728.6,2001-11-15.
[11]蔡啟明.以動(dòng)態(tài)心率為指標(biāo)的體力勞動(dòng)強(qiáng)度評(píng)價(jià)方法研究[J].人類工效學(xué),1999,5(4) ,38-41.
[12]蔡啟明,吳海燕.成年男子心率與能量代謝率關(guān)系試驗(yàn)研究[J].人類工效學(xué),1996,2(2) ,42-45.
猜你喜歡
康復(fù)(2023年11期)2023-11-20 07:45:54
康復(fù)(2023年14期)2023-11-20 06:04:54
中老年保健(2021年4期)2021-08-22 07:08:14
護(hù)理與康復(fù)(2021年2期)2021-03-05 08:10:44
家庭醫(yī)學(xué)(下半月)(2020年1期)2020-05-11 02:05:46
廣東醫(yī)科大學(xué)學(xué)報(bào)(2020年6期)2020-02-06 06:00:56
特別健康(2018年2期)2018-06-29 06:13:44
反射療法與康復(fù)醫(yī)學(xué)(2017年7期)2017-01-16 01:11:02
中國衛(wèi)生(2014年6期)2014-11-10 02:30:50
中國中醫(yī)藥現(xiàn)代遠(yuǎn)程教育(2014年23期)2014-03-01 04:33:45