大柔性靈巧手指彎曲仿真研究*
2014-09-15 09:23:26張建超楊慶華邵鐵鋒鮑官軍
機電工程 2014年2期
關鍵詞:研究
張建超,楊慶華,邵鐵鋒,鮑官軍
(浙江工業大學 特種裝備制造與先進加工技術教育部/浙江省重點實驗室,浙江 杭州 310032)
0 引 言
作為機器人與目標物體相互作用的最后環節和執行部件,末端執行器對于機器人智能化水平和作業水平的提高具有重要意義[1]。末端執行器是機器人的重要構成部件,傳統機器人的末端執行器被用于完成一些簡單的操作,如焊接、噴漆、裝配等,但由于這種末端執行器結構簡單、運動形式單一、自由度少、抓取穩定性差、靈活性不足,在很大程度上制約了現代機器人技術的進一步發展[2]。
氣動柔性關節[3]是在現代機器人對安全性、柔順性和舒適性提出更高要求的前提下而發展出來的一種新型氣動末端執行元件。與傳統末端執行元件相比具有許多無可比擬的優點,如:既是驅動器也是執行器,可以直接驅動,無需傳動裝置與減速裝置、運動自由度多、運動平滑無摩擦、功率重量比大等等。所以氣動柔性關節目前已成為氣動末端執行器研究與開發的熱點之一[4],最典型的代表就是美國原子物理學家McKibben設計的McKibben驅動器[5-8]。近年來,國內各大院校也紛紛開始著手研究氣動柔性關節,吉林大學耿德旭等人[9]設計了雙向主動彎曲氣動柔性關節,浙江理工大學王龍輝等人[10]也提出了一種氣動柔性驅關節,將兩個氣動柔性驅動器并聯以起到相互對抗作用來驅動關節,并以此為基礎設計了一種7自由度氣動人工肌肉機械手臂。
大柔性靈巧手指是浙江工業大學提出的又一種新型氣動柔性末端執行器,本研究就手指彎曲特性進行ANSYS仿真分析與實驗研究。
1 大柔性靈巧手指結構及工作原理
大柔性靈巧手指結構及工作原理如圖1所示。圖1中,當通過有孔端蓋4將壓縮氣體通入手指內腔時,由于螺旋彈簧3的約束作用,橡膠管2不會產生徑向膨脹,同時由于薄彈簧鋼片6的約束作用,橡膠管2在厚壁側不會產生軸向伸長量,而越靠近薄壁側軸向伸長量越大,于是手指向厚壁側方向彎曲,彎曲角度隨著手指內腔壓力增大而增大;當釋放手指內腔壓縮氣體時,由于橡膠管2、螺旋彈簧3及薄彈簧鋼片6的作用,橡膠管恢復至初始狀態。
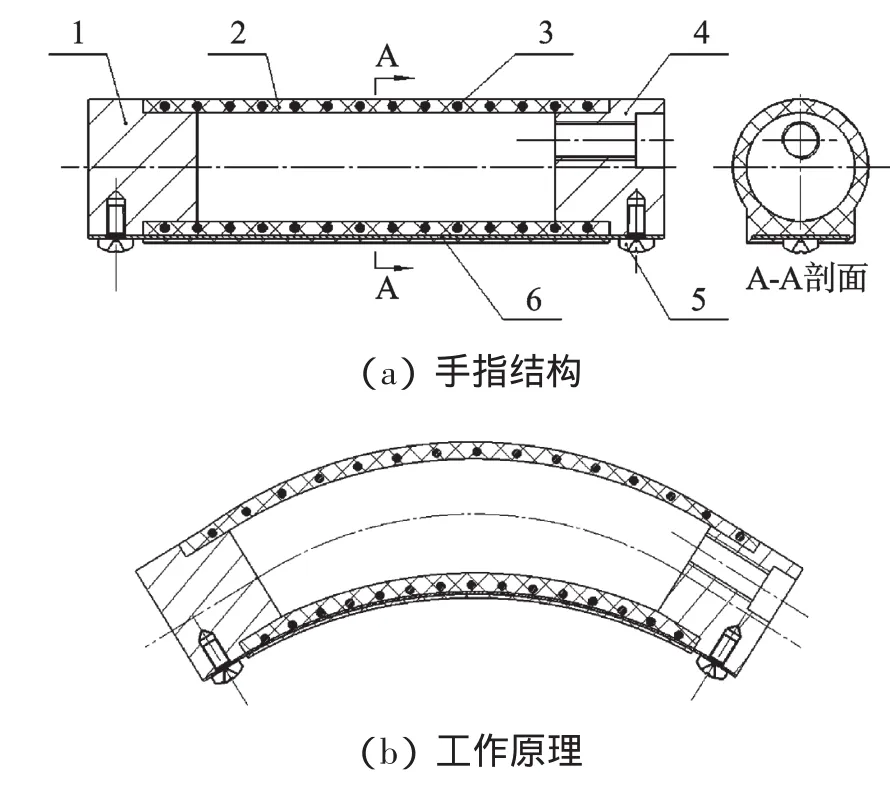
圖1 大柔性靈巧手指結構及工作原理圖
2 大柔性靈巧手指彎曲仿真分析
文獻[11]在結合了靜力平衡與力矩平衡原理的情況下推導出手指轉角靜態模型,給出了手指彎曲角度θ關于手指變量的求解公式[11],并通過Matlab仿真得到手指彎曲角度θ與內腔壓力P之間的關系曲線,如圖2所示。
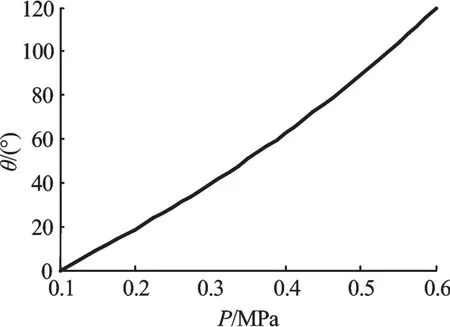
圖2 手指內腔壓力與彎曲角度曲線(Matlab仿真)
通過文獻[12]及大柔性靈巧手指工作原理可知,當壓縮氣體充入手指內腔時手指發生彎曲,產生的效果可以等效為在手指自由端施加彎矩,即可以將手指視為自由端受彎矩的懸臂梁[13]。手指內腔壓力與彎矩關系如表1所示。
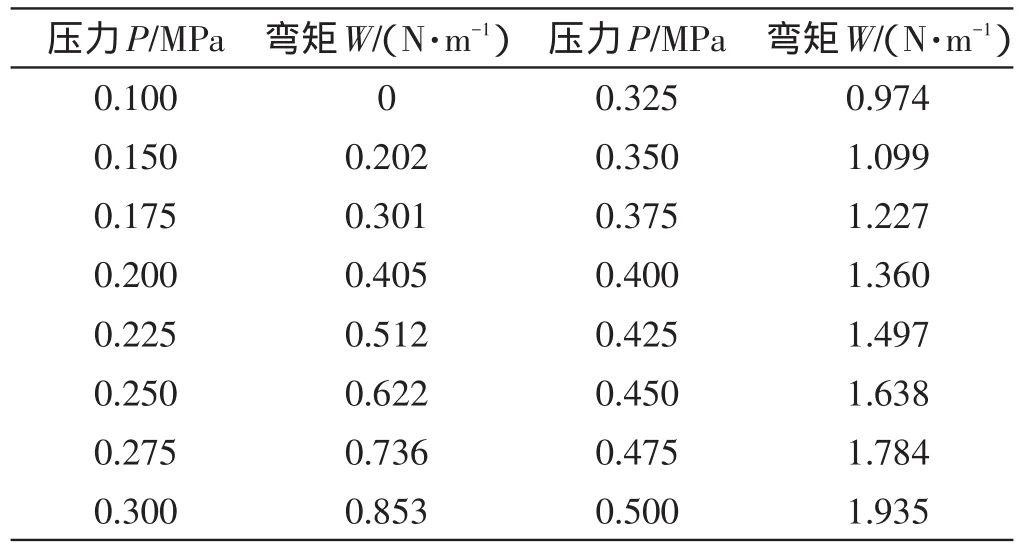
表1 手指內腔壓力與彎矩等效關系
這里需要指出,本研究分析手指彎曲時忽略手指自重影響[14];當手指內腔壓力為0.1 MPa時,手指并未充入壓縮氣體,手指所受為大氣壓強,所以等效彎矩為0 N/m。
在ANSYS軟件中,仿真彎矩與手指彎曲角度的關系,即手指仿真參數如表2所示。單元類型選擇為BEAM189梁單元,根據仿真參數建立梁的分析模型,約束加載采用的是一端施加全約束,另一端施加彎矩差。
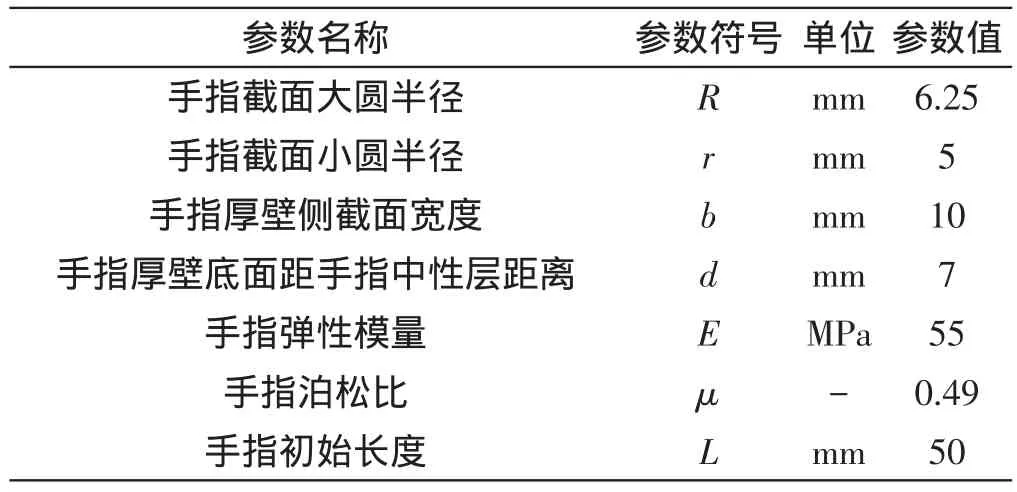
表2 大柔性靈巧手指仿真參數
在后處理模塊中,通過選擇查看彎曲角度,幾張仿真結果圖如圖3所示(圖中所示角度值為弧度制)。的方式,設置好載荷步后求解分析。這里要特別強調的是,由于手指彎曲角度可能會比較大,分析時需要打開大變形分析選項,否則分析結果將會產生較大誤
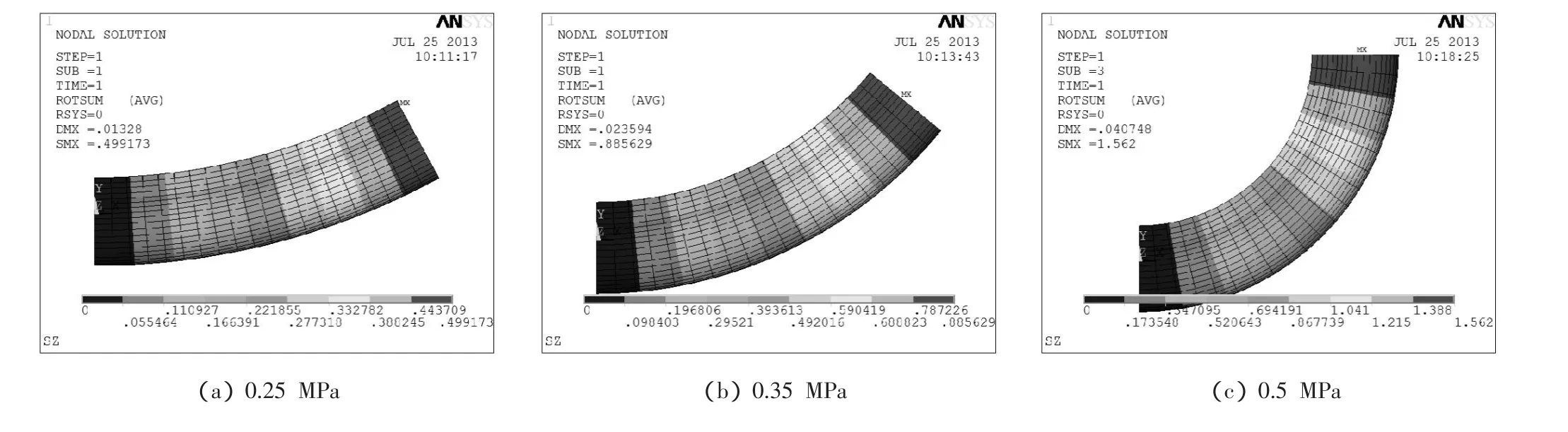
圖3 不同手指內腔壓力彎曲效果圖
通過整理仿真數據可得大柔性靈巧手指彎曲角度θ與內腔壓力P之間的關系曲線(ANSYS仿真)如圖4所示。將圖4與圖1比較可以發現,曲線走勢基本吻合,從圖中可以看出,隨著手指內腔壓力增大,彎曲角度也逐漸增大,且成指數增長趨勢,當手指內腔壓力為0.5 MPa時,手指彎曲角度為89.5°,接近于90°。
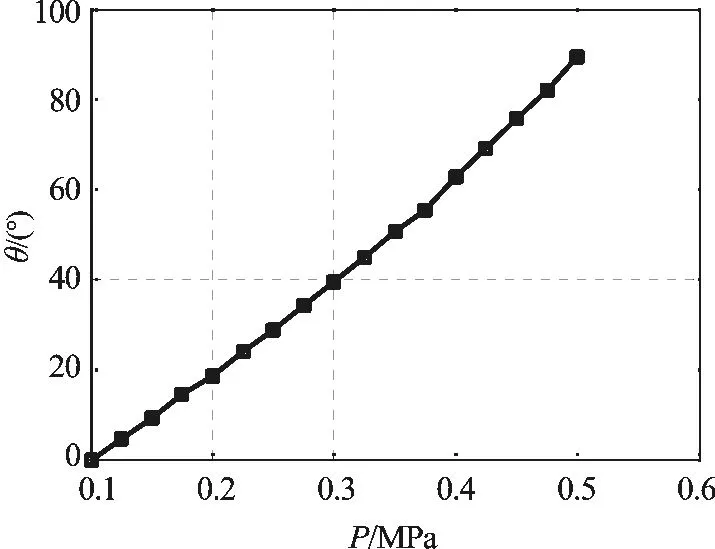
圖4 手指內腔壓力與彎曲角度曲線(ANSYS仿真)
3 大柔性靈巧手指彎曲實驗研究
大柔性靈巧手指實驗原理圖如圖5所示。

圖5 手指彎曲特性實驗原理圖
空氣壓縮機輸出壓縮氣體,其最高壓力可達0.8 MPa,貯氣容積為0.26 m3;過濾減壓閥用來過濾空氣并降低氣體壓力,過濾精度是5 μm,其最高可控壓力為1 MPa,調壓范圍是0.05 MPa~0.85 MPa;油霧分離器可以凈化壓縮空氣,避免顆粒塵埃進入下游工作回路和手指內腔中,其過濾精度是0.3 μm,最高壓力為1 MPa;電氣比例閥自帶壓力傳感器與控制回路,用來調節輸入電壓與輸出氣壓的比例關系;PCL-812PG數據采集卡具有2路D/A,16路A/D,12位分辨率,通過D/A輸出電壓信號,用以控制電氣比例閥,從而改變手指的內腔壓力,同時利用A/D轉換通道檢測比例閥的壓力反饋信號,實現半閉環控制;單向彎曲角度傳感器FLX-03 A用來測量手指的彎曲角度,通過嵌入式處理器處理數據,并且以CAN總線方式傳送給工控機;工控機負責實驗系統的整體控制。
大柔性靈巧手指的實物圖與仿真圖如圖6所示。
本研究將實驗數據整理分析,通過Matlab軟件可得手指彎曲理論曲線與實驗曲線的對比圖如圖7所示。由圖7可知,手指仿真曲線與手指充氣過程曲線比較吻合,由于手指放氣過程有一個滯后環節,所得到的曲線偏差相對較大。
筆者所研究的大柔性靈巧手指由于受到一些實際條件的限制,手指承壓能力有限,在實驗研究中發現手指所能承受的最高內腔壓強為0.6 MPa左右,主要原因是:
(1)手指材料為橡膠材料,為了滿足易變性且彈性好等實際要求,手指彈性模量比較小,大角度彎曲時薄壁側拉伸長度比較大,容易產生應力屈服,如圖6(c)所示;
(2)目前是采用硅橡膠等粘接劑接合手指端蓋與手指,實驗時發現接合部位也容易產生應力集中,造成端蓋脫離。
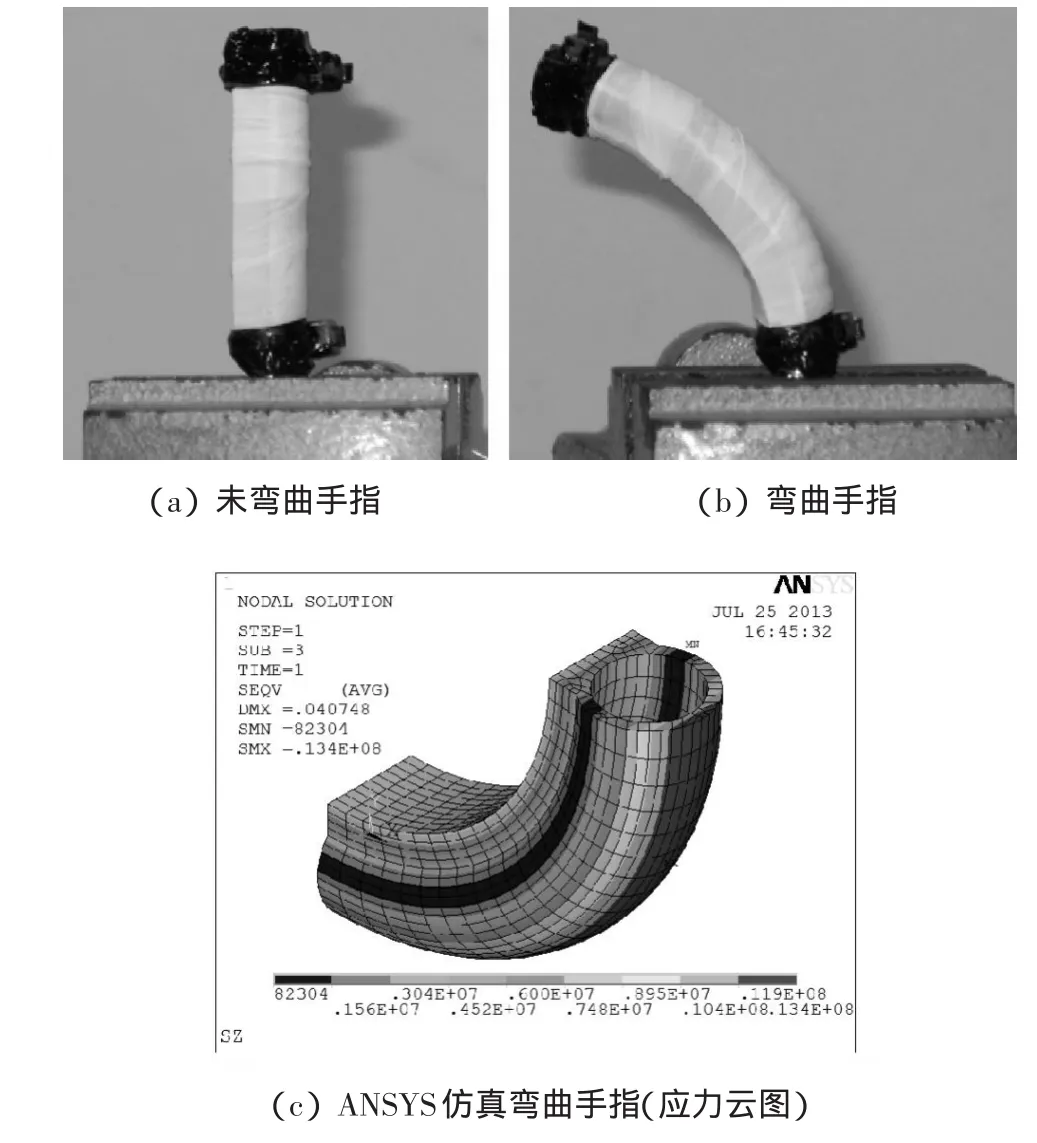
圖6 大柔性靈巧手指實物
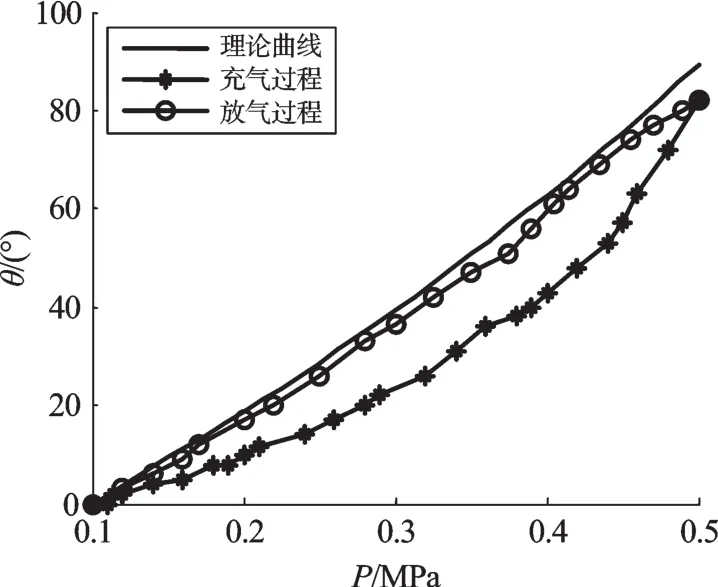
圖7 仿真與實驗曲線對比圖
觀察圖6(b)也可以發現,手指彎曲并不僅限于理論彎曲平面內,在彎曲平面法線方向上也有少量變形,那是由于手指受到制作工藝的限制,實際手指形態并不完全與理論模型相符,手指受力情況也并不一定是均勻分布,而且薄彈簧鋼片也不能夠完全起到限制手指側向彎曲或扭轉的作用。
4 結束語
本研究通過ANSYS仿真及實驗研究很好地驗證了大柔性靈巧手指轉角靜態模型的正確性,但同時也發現了手指的一些不足,現大致列舉如下:①手指承壓能力有限,導致手指抓取強度不高;②手指制作精度不夠,抓取時存在定位誤差;③相同模型的不同手指之間彎曲結果也存在一定誤差。針對以上各點,在以后的研究工作中需不斷改進,盡量完善。
(References):
[1]姜 力,蔡 鶴,皋劉宏.新型集成化仿人手指及其動力學分析[J].機械工程學報,2004,40(4):139-143.
[2]劉 杰,張玉茹.機器人靈巧手抓持分類器的設計與實現[J].機器人,2003,25(3):259-263.
[3]章 軍,須文波,宋 浩.氣動柔性關節的抓取機械手的受力分析[J].設計與研究,2006(8):35-37.
[4]李尚會,楊慶華,鮑官軍,等.基于FPA的新型氣動柔性球關節的研究[J].浙江工業大學學報,2009,37(6):662-666.
[5]CALDWELL D G,MEDRANO-CERDA G A,GOODWIN M J.Braided pneumatic actuator control of a multi-jointed manipulator[C]//IEEE International Conference on Systems,Man and Cybernetics.Piscataway,NJ,USA:IEEE,1993:423-428.
[6]CHOU C P,HANNAFORD B.Static and dynamic character?istics of McKibben pneumatic artificial muscles[C]//IEEE International Conference on Robotics and Automation.Pis?cataway,NJ,USA:IEEE,1994:281-286.
[7]CHOU C P,HANNAFORD B.Measurement and modeling of McKibben pneumatic artificial muscles[J].IEEE Trans?actions on Robotics and Automation,1996,12(1):90-103.
[8]TSAGARAKIS N,CALDWELL D G.Improved modeling and assessment of pneumatic muscle actuators[C]//IEEE International Conference on Robotics and Automation.Pis?cataway,NJ,USA:IEEE,2000:3651-3636.
[9]耿德旭.雙向主動彎曲氣動柔性關節及其在機械手中的應用[D].吉林:吉林大學機械工程學院,2011.
[10]王龍輝,金英子,朱紅亮,等.七自由度氣動人工肌肉機械手臂的設計及研究[J].浙江理工大學學報,2012,29(1):74-78.
[11]盧君宜,熊曉松,朱 東.正自由度采摘機械臂關節空間軌跡規劃[J].輕工機械,2013,31(4):11-14.
[12]羅鑫遠.大柔性靈巧手指特性研究[D].杭州:浙江工業大學機械工程學院,2012.
[13]徐 生.氣動柔性手指的運動分析及其控制研究[D].杭州:浙江工業大學機械工程學院,2005.
[14]鮑官軍.氣動柔性驅動器FPA的特性及其在多指靈巧手設計中的應用研究[D].杭州:浙江工業大學機械工程學院,2006.
猜你喜歡
體育科技文獻通報(2022年3期)2022-05-23 13:46:54
天津外國語大學學報(2021年3期)2021-08-13 08:32:18
遼金歷史與考古(2021年0期)2021-07-29 01:06:54
科技傳播(2019年22期)2020-01-14 03:06:54
遼金歷史與考古(2019年0期)2020-01-06 07:45:20
民用飛機設計與研究(2019年4期)2019-05-21 07:21:24
電子制作(2018年11期)2018-08-04 03:26:04
汽車工程學報(2017年2期)2017-07-05 08:13:02
國際商務財會(2017年8期)2017-06-21 06:14:14
電子制作(2017年23期)2017-02-02 07:17:19