基于交流同步發(fā)電機電磁轉(zhuǎn)矩的電動機加載方法研究
2014-09-15 04:39:10王連明
東北師大學(xué)報(自然科學(xué)版) 2014年3期
韓 冬,王連明
(東北師范大學(xué)應(yīng)用電子技術(shù)研究所,吉林 長春 130024)
0 引言
目前,電機的加載裝置從工作原理上主要分為機械加載器、磁粉加載器、電磁渦流加載器.但都相應(yīng)存在一些缺點.
(1)機械加載器 常有高溫現(xiàn)象,對電機損害較大,損耗較大.并且動態(tài)加載時,實時性較差[1-3].
(2)磁粉加載器 適用于低轉(zhuǎn)速測試環(huán)境,在異步電動機不穩(wěn)定區(qū)段不能提供穩(wěn)定的測試,而且容易出現(xiàn)轉(zhuǎn)矩不均或卡死等問題[4-6].
(3)電磁渦流加載器 存在調(diào)整比較困難,故障率較高,制動軸承經(jīng)常無規(guī)律損壞,散熱設(shè)備投資高等問題[7-8].
由于電動機加載設(shè)備存在種類少、結(jié)構(gòu)復(fù)雜、消耗大、可移植性較差和適用范圍窄等缺點.本文將介紹一種新的電動機加載方法,把交流同步發(fā)電機轉(zhuǎn)子與電動機轉(zhuǎn)子同軸連接,通過控制交流同步發(fā)電機的電磁轉(zhuǎn)矩對其進行加載.
1 同步發(fā)電機電磁轉(zhuǎn)矩原理
本文采用的是隱極性同步發(fā)電機,其對稱的三相定子繞組分別是:A—X,B—Y和C—Z.圖1即為單相同步發(fā)電機模型.
由于磁路中鐵芯部分的磁阻非常小,忽略鐵磁部分的磁阻Rm1,只考慮氣隙部分的磁阻Rm2,那么氣隙磁感應(yīng)強度的大小為[9-10]

設(shè)氣隙中任意一點P與轉(zhuǎn)軸構(gòu)成的平面跟參考平面MM′的夾角為α,轉(zhuǎn)子以角速度ω沿逆時針方向轉(zhuǎn)動,這樣任意t時刻,氣隙磁感應(yīng)強度基波分量即主磁場表示式

式中B0m為基波分量的峰值,且

式中E0m為主磁感應(yīng)電動勢幅值,其表達式為

式中:L為轉(zhuǎn)子長度;v為定子線圈的相對線速度;NC為定子每相繞組的匝數(shù).
當(dāng)發(fā)電機的磁極數(shù)為p時,感應(yīng)電動勢的頻率f表達式變?yōu)?/p>

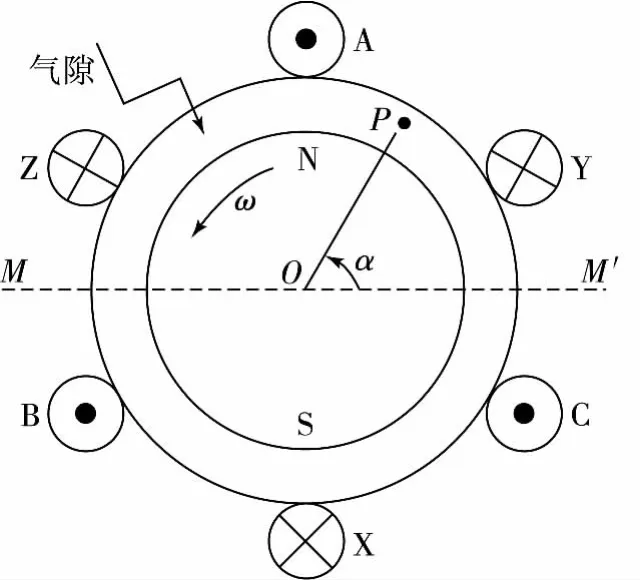
圖1 三相隱極交流同步發(fā)電機模型
且v=ωr,r為轉(zhuǎn)子半徑,磁極所對應(yīng)的氣隙面積A=πrL.由(3)式可以將主磁感應(yīng)電動勢的有效值表達式寫成

每相電樞電路的電壓平衡方程為

其中相電流為

式中θ為功率角.
由于同步電抗和電樞電阻較小,因此忽略同步電抗Xt與電樞電阻R,則相電壓U等于主磁感應(yīng)電動勢E0,即

交流同步發(fā)電機帶上負載,則三相輸出的總有功功率表達式

交流同步發(fā)電機的電磁轉(zhuǎn)矩是發(fā)電機在輸出有功功率時,電樞反施于轉(zhuǎn)子的阻轉(zhuǎn)矩,用TM表示.電磁轉(zhuǎn)矩TM等于電磁功率(即總有功功率P)與同步角速度ω之比[10],即

由(6)式、(9—10)式及ω =2πf可得:

則電磁轉(zhuǎn)矩TM表達式

系數(shù)K1與勵磁繞組的結(jié)構(gòu)、匝數(shù)、氣隙面積、氣息長度、空氣磁導(dǎo)率及定子繞組匝數(shù)有關(guān),即K1為與發(fā)電機構(gòu)造相關(guān)的常數(shù).系數(shù)K2與發(fā)電機運行狀態(tài)有關(guān),當(dāng)發(fā)電機處于非過載運行狀態(tài)時K2為常數(shù).
綜合以上分析可知,通過控制同步發(fā)電機的勵磁電流,就可以改變同步發(fā)電機的電磁轉(zhuǎn)矩.要使發(fā)電機正常工作需要有足夠大的動力轉(zhuǎn)矩克服發(fā)電機的電磁轉(zhuǎn)矩,本文設(shè)計將交流同步發(fā)電機轉(zhuǎn)子和電動機轉(zhuǎn)子1∶1同軸連接,同步發(fā)電機的動力轉(zhuǎn)矩便由電動機提供,實現(xiàn)對電動機加載的目的.
2 電動機的轉(zhuǎn)矩檢測
同步發(fā)電機的輸入功率P1由電動機提供,同步發(fā)電機輸入功率中減去空載損耗P0和電樞銅損耗pCu,便得到發(fā)電機輸出電功率P2,

式中P2,pCu可由以下公式得出:

本系統(tǒng)采用的是三相異步電動機,其負載轉(zhuǎn)矩為

式中:TLoad為電動機負載轉(zhuǎn)矩;PLoad為電動機輸出有功功率;nm為電動機的轉(zhuǎn)速.
由(14—16)式可知,通過測得電動機的輸出有功功率和電動機轉(zhuǎn)速就能算出電動機的負載轉(zhuǎn)矩TLoad.如果設(shè)定的同步發(fā)電機電磁轉(zhuǎn)矩TM和得出的電動機的負載轉(zhuǎn)矩TLoad相等便能夠證明此加載方法有效.
3 加載系統(tǒng)設(shè)計
因三相交流同步發(fā)電機與單相交流同步發(fā)電機之間只存在相數(shù)的區(qū)別,所以選用單相交流同步發(fā)電機,并選用其負載為純阻性負載,能減少功率角對同步發(fā)電機輸出功率的影響.加載系統(tǒng)整體結(jié)構(gòu)如圖2所示.
電動機帶動交流同步發(fā)電機啟動后,上位機設(shè)定負載轉(zhuǎn)矩值,經(jīng)串行口將數(shù)據(jù)發(fā)給下位機,下位機控制可控直流電壓源的輸出電壓,改變同步發(fā)電機的勵磁電流,進而改變同步發(fā)電機的電磁轉(zhuǎn)矩.同時下位機將測得的電動機負載轉(zhuǎn)矩數(shù)據(jù)經(jīng)串行口實時發(fā)送回上位機,并與設(shè)定的電動機負載轉(zhuǎn)矩進行顯示比對.系統(tǒng)各個模塊的功能如下:
(1)可控直流電壓源為交流同步發(fā)電機提供可控的勵磁電流,它由可控變壓器和交直流轉(zhuǎn)換電路組成.可控變壓器由自耦變壓器和與之同軸相連的直流電動機組成.通過輸入控制量控制直流電動機的轉(zhuǎn)動,就可以改變自耦變壓器次級線圈輸出點的位置,改變變壓器的輸出電壓.變壓器的輸出再經(jīng)過全波整流和濾波,最終實現(xiàn)可控直流電壓的輸出.
(2)功率檢測模塊檢測交流同步發(fā)電機的輸出有功功率.模塊由電能計量單元和電流電壓互感器組成.電流電壓互感器將大電流和大電壓分別轉(zhuǎn)換為弱電流和弱電壓,用于電能計量單元的信號采集,同時也可實現(xiàn)電氣的隔離,以提高系統(tǒng)的安全性[11-15].電能計量單元主要用于完成有功功率的測量,本系統(tǒng)采用美國模擬器件AD公司所生產(chǎn)的電能專用測量芯片ADE7758.該芯片能有效完成三相電系統(tǒng)中各相電參數(shù)的實時測量,并通過SPI接口與MCU完成實時通信.
(3)轉(zhuǎn)速測量采用了基于紅外傳感器元件的脈沖發(fā)生器,其優(yōu)點是成本低、構(gòu)造簡單.測速算法為M/T法,由單片機編程實現(xiàn),保證了高速和低速運行時的測速精度.系統(tǒng)下位機采用了ATmega128單片機,上位機主要通過C++來實現(xiàn)負載轉(zhuǎn)矩設(shè)定和負載轉(zhuǎn)矩檢測界面.系統(tǒng)上位機軟件主要完成上位機系統(tǒng)初始化功能、配置下位機參數(shù)功能、接收下位機數(shù)據(jù)功能、波形繪制功能以及數(shù)據(jù)存儲功能.功能實現(xiàn)流程如圖3所示.
系統(tǒng)下位機部分主要由定時器模塊、轉(zhuǎn)速測量模塊、ADE7758有功功率測量模塊、串行口通信模塊和控制模塊構(gòu)成.下位機對電磁轉(zhuǎn)矩的控制原理如圖4所示.
下位機根據(jù)上位機指令產(chǎn)生給定轉(zhuǎn)矩,然后,通過可控直流電壓源輸出電壓值改變同步發(fā)電機的勵磁電流If,進而改變電動機負載轉(zhuǎn)矩.同步發(fā)電機輸出功率通過ADE7758檢測,并由(14—16)式計算出實際負載轉(zhuǎn)矩值,并與設(shè)定轉(zhuǎn)矩進行比較,從而構(gòu)成一個轉(zhuǎn)矩的閉環(huán)控制系統(tǒng),采用PID控制算法,保證輸出轉(zhuǎn)矩快速、準確地跟蹤設(shè)定轉(zhuǎn)矩.
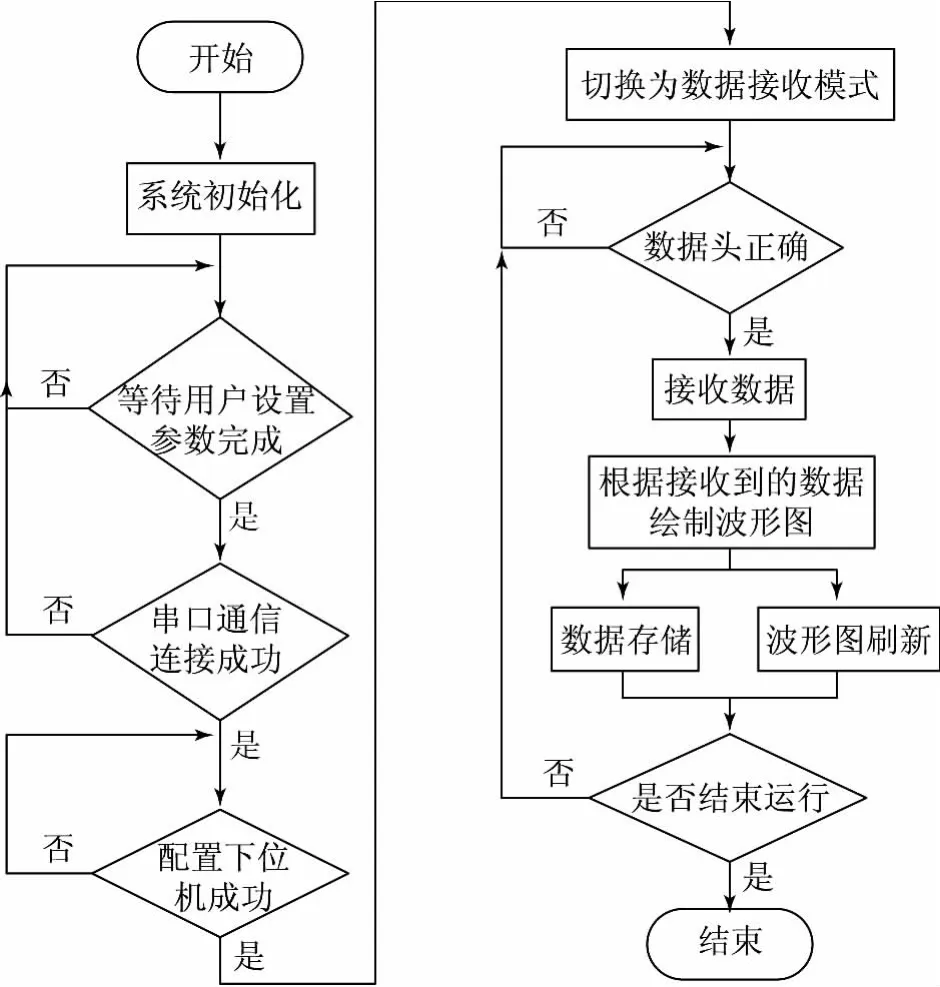
圖3 上位機功能實現(xiàn)流程

圖4 下位機的控制原理
4 加載實驗測試
系統(tǒng)所使用發(fā)電機額定功率為5kW的4極單相交流同步發(fā)電機,電動機額定功率為5.5kW,額定電流為11.6A,額定功率因數(shù)為0.84的4極三相交流異步電動機.搭建實際的基于交流同步發(fā)電機的電動機加載平臺,如圖5所示.
為驗證加載效果,擬用兩種方式對異步電動機進行加載:一種是對電動機進行恒定負載轉(zhuǎn)矩加載;另外一種是對電動機進行變負載轉(zhuǎn)矩加載.其中變轉(zhuǎn)矩加載分別按正弦變化和鋸齒波變化進行加載.
4.1 恒定負載轉(zhuǎn)矩加載實驗
保持同步發(fā)電機的純阻性負載不變,上位機設(shè)定恒定負載轉(zhuǎn)矩,經(jīng)圖4控制流程對電動機進行加載,同時把檢測到的電動機負載轉(zhuǎn)矩通過串口發(fā)給上位機,上位機描繪加載轉(zhuǎn)矩設(shè)定值與電動機負載轉(zhuǎn)矩值的波形圖,如圖6所示.其中虛線是設(shè)定的加載轉(zhuǎn)矩,實線是測得的電動機輸出轉(zhuǎn)矩.
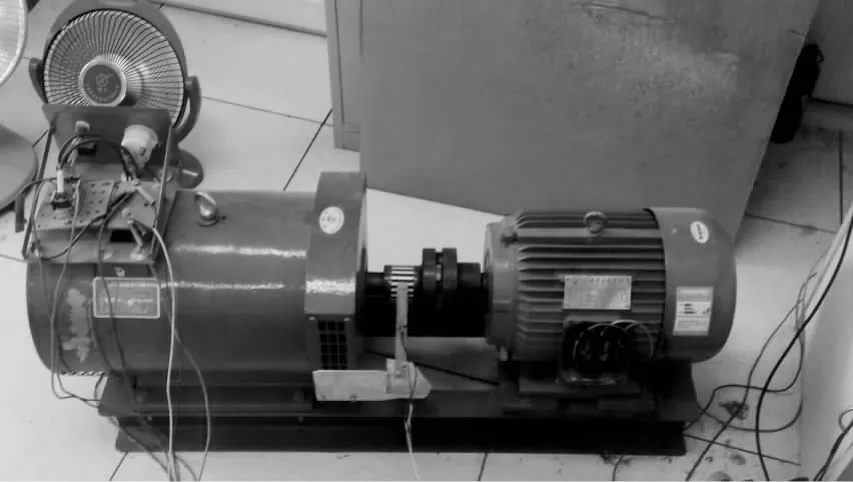
圖5 加載裝置實物圖

圖6 恒定負載轉(zhuǎn)矩實驗結(jié)果
通過FLUKE 43B型電能質(zhì)量分析儀測量電動機消耗的有功功率,并利用(16)式得到實際的電動機負載轉(zhuǎn)矩值(見表1).
由表1可見:控制交流同步發(fā)電機的勵磁電流,可以保持電動機的負載轉(zhuǎn)矩不變;實際電動機負載轉(zhuǎn)矩值與設(shè)定的負載轉(zhuǎn)矩值基本相等,此情況下的加載精度為5.5%.

表1 恒定負載轉(zhuǎn)矩實驗結(jié)果 N·m
4.2 變負載轉(zhuǎn)矩加載實驗
4.2.1 負載正弦變化加載實驗
保持同步發(fā)電機的純阻性負載不變,上位機設(shè)定負載轉(zhuǎn)矩按正弦規(guī)律變化,經(jīng)圖4控制流程對電動機進行加載,同時把檢測到的電動機負載轉(zhuǎn)矩通過串口發(fā)給上位機,上位機描繪加載轉(zhuǎn)矩設(shè)定值與電動機負載轉(zhuǎn)矩值的波形見圖7,其中虛線是設(shè)定的加載轉(zhuǎn)矩,實線是測得的電動機輸出轉(zhuǎn)矩.實際得到的電動機負載轉(zhuǎn)矩值經(jīng)Matlab描繪結(jié)果,如圖8所示.
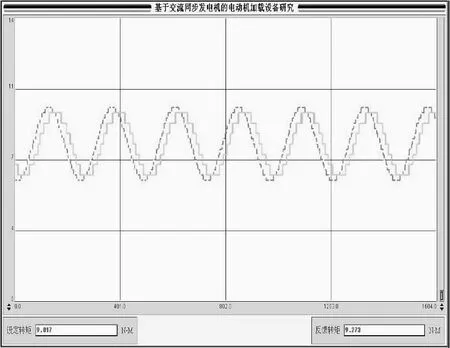
圖7 正弦加載實驗結(jié)果
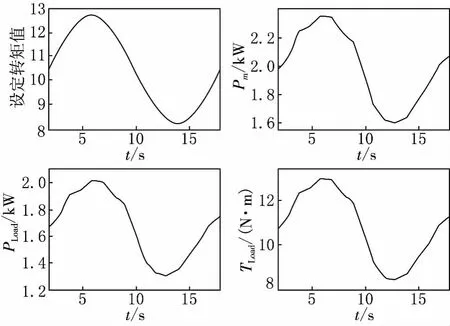
圖8 正弦變化負載轉(zhuǎn)矩實驗FLUKE電能表輸出結(jié)果
4.2.2 負載鋸齒波變化加載實驗
如正弦加載操作一樣,設(shè)定負載轉(zhuǎn)矩按照鋸齒波規(guī)律改變,其結(jié)果如圖9所示.實際得到的電動機負載轉(zhuǎn)矩值經(jīng)Matlab描繪結(jié)果如圖10所示.
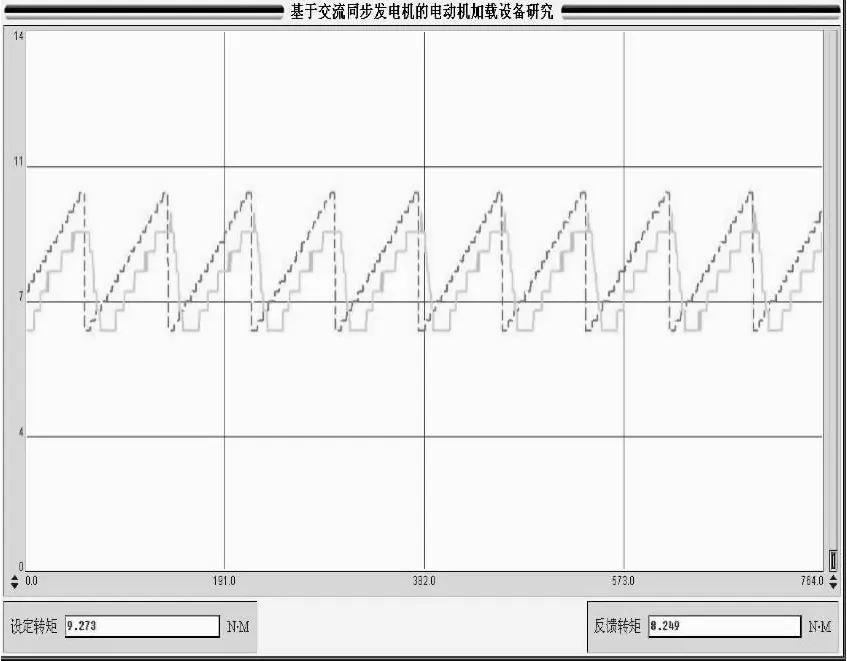
圖9 鋸齒波加載實驗結(jié)果
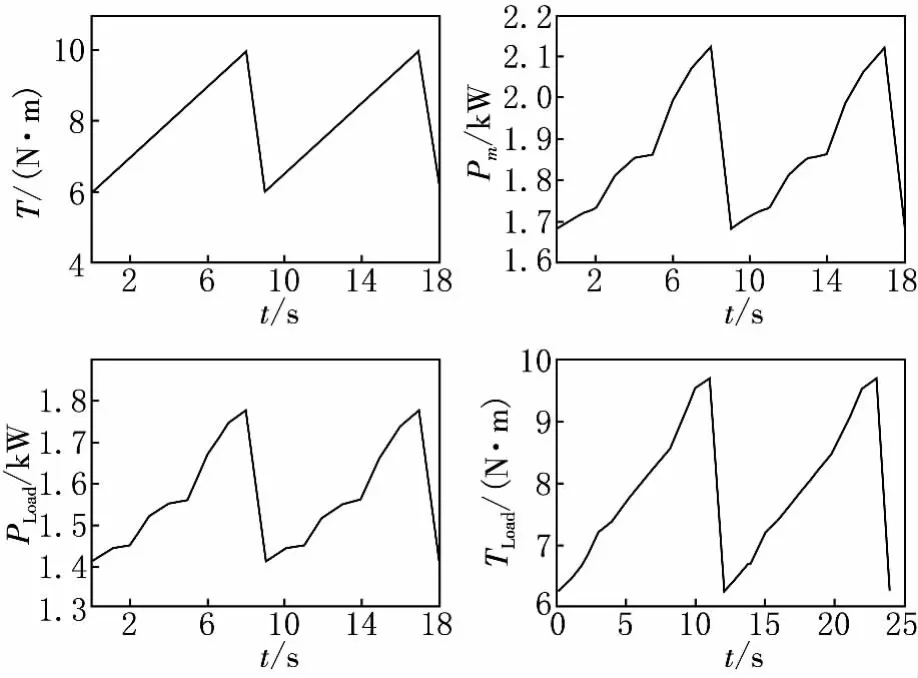
圖10 鋸齒波變化負載轉(zhuǎn)矩實驗FLUKE電能表輸出結(jié)果
由圖10可見:控制交流同步發(fā)電機的勵磁電流,可以使電動機的負載轉(zhuǎn)矩變化;實際的負載轉(zhuǎn)矩變化趨勢和設(shè)定的負載轉(zhuǎn)矩變化趨勢相同,此情況下的加載精度為8%.
5 結(jié)論
綜上所述,通過控制交流同步發(fā)電機的勵磁電流可以改變交流同步發(fā)電機的電磁轉(zhuǎn)矩進而改變電動機的負載轉(zhuǎn)矩,能夠?qū)崿F(xiàn)對電動機加載的目的.此項加載設(shè)計可方便地用于模擬實際工況時的各種實際負載的變化規(guī)律,從而實現(xiàn)模擬加載.在本文設(shè)計中,通過改變連接器的機械結(jié)構(gòu)就能夠?qū)崿F(xiàn)對多種電動機的加載測試.因此,本文加載方法是一種具有可移植性好、占用空間小、造低價、控制靈活、穩(wěn)固耐用等特點的新型加載方法.
[1]MORAR A.Considerations concerning the loading of small power electric motors[J].Acta Electrotehnica,2003,44(2):112-116.
[2]NASH J N.Direct torque control.Inductionmotor vector control without an encoder[J].IEEE Transactions Ind.,1997,33(2):333-341.
[3]JIN T D,COIT D W.Variance of system reliability estimates with arbitrarily repeated components[J].IEEE Transactions on Reliability,2001,50(4):409-412.
[4]MIKHAEIL-BOULES N.Design analysis of electromagnetic particle clutch[C].IEEE Proceedings of the 29th IAS Annual Meeting.Warren:General Motors,1994:357-360.
[5]王力,錢林方,高強,等.磁粉制動器的建模與辨識研究[J].電氣自動化,2010,35(5):55-58.
[6]任國海,陳琢,杜鵬英,等.磁粉制動器對異步電動機機械特性的測量[J].電機與控制學(xué)報,2006,10(3):275-277.
[7]NOVAK P,EKELUND T,JOVIK I,et al.Modeling and control of variable-speed wind-turbine drive-system dynamics[J].IEEE Control Systems Magazine,1995,15(4):28-38.
[8]QIAN M,KACHROO P.Modeling and control of electromagnetic brakes for enhanced braking capabilities for automated highway systems[J].IEEE Conference on Intelligent Transportation Systems,1997:391-396.
[9]CHAPMAN S J.Electric machinery fundamentals[M].USA:McGraw-Hill,Inc,2004:166-226.
[10]郭木森.電工學(xué)[M].北京:高等教育出版社,2001:373-413.
[11]HU YUAN HANG,YU AN NING,WANG LIAN MING.A novel loading method for electric motors using AC synchronous generators[C]//Proceeding of the 2012International Conference on Computer Science and Electronic Engineering,San Francisco:IAENG,2012:406-410.
[12]CHEN KEXING,WANG GANG.Development and research of torque transducers[J].Aviation Metrology & Measurement Technology,2003,23(6):5-6.
[13]JANG SEOK-MYEONG,LEE SUNG-HO,JEONG SANG-SUB.Characteristic analysis of eddy-current brake system using the linear halbach array[J].IEEE Transactions on Magnetics,2002,38(5):2994-2996.
[14]GYUGYI L.Unified power-flow control concept for flexible AC transmission systems [J].IEEE Proceedings Part C,Generation,Transmission,and Distribution,1992,139(4):323-331.
[15]BUSO S,MALESANI L,MATTACELLI P.Comparison of current control techniques for active filter applications[J].IEEE Transactions on Industrial Electronics,1998,45(5):722-729.
猜你喜歡
科教新報(2022年12期)2022-05-23 06:34:16
故事作文·高年級(2021年12期)2021-12-21 02:32:35
今日農(nóng)業(yè)(2021年14期)2021-10-14 08:35:28
海峽姐妹(2020年8期)2020-08-25 09:30:18
大電機技術(shù)(2017年3期)2017-06-05 09:36:02
軍事文摘(2016年16期)2016-09-13 06:15:49
智能建筑電氣技術(shù)(2015年5期)2015-12-10 05:52:30
人民中國(日文版)(2015年10期)2015-04-16 03:53:58
人民中國(日文版)(2015年9期)2015-03-20 15:08:12
電力工程技術(shù)(2014年1期)2014-03-20 14:19:06