柴電混合推進模式在8000kW海洋救助船的應用
2014-09-09 02:11:48王雙喜
江蘇船舶 2014年5期
關鍵詞:發電機
王雙喜
(鎮江賽爾尼柯電器有限公司,江蘇 鎮江 212009)
柴電混合推進模式在8000kW海洋救助船的應用
王雙喜
(鎮江賽爾尼柯電器有限公司,江蘇 鎮江 212009)
針對船舶推進系統采用柴電混合推進模式大部分設備及控制技術主要依賴進口的問題,研究動力系統柴電混合推進模式配套的主配電板及功率管理系統(PMS)的相關功能,同時結合航行試驗時對混合推進模式的不同進入方式過程中的主要工作參數及變化進行了分析。在8 000 kW海洋救助船系泊及航行試驗中,柴電混合推進模式的功能測試及技術性能達到預期效果。
救助工作船;柴電推進;配電板;限流啟動;動態進入;靜態進入
0 引言
為了節能減排,平臺守護、救助等雙機雙槳船舶在低速巡航時采用柴電混合推進模式。柴電混合推進模式的難點之一是作為電推的電動機如何起動,目前采用較多的是自耦變壓器降壓起動、小電機拖動起動、雙軸帶發電機并車起動及限流起動等方式。前2種起動方式均需要增加額外的機電設備,成本高、占用空間大;雙軸帶發電機并車起動雖是最為簡單的方式,但每次進入柴電混合推進模式前必須將2臺主柴油機全部起動,額外消耗一定能源,且如果其中1臺主柴油機因故不能起動將無法進入柴電混合推進模式;而與限流起動技術相配套的PMS系統一直被國外所壟斷。
本文研究的8 000 kW海洋救助船的柴電混合推進系統,采用動、靜態2種進入方式的柴電混合推進模式,在不同航行工況時均能發揮較高的推進效率,可提高船舶的運行安全可靠性。
1 船舶推進系統
推進系統分左右2套系統,每套推進系統包含主柴油機、齒輪箱、變距槳、軸帶發電機(同時可作電動機)等,其中,主柴油機功率為4 500 kW,轉速為750 r/min。為了實現柴電混合推進,其齒輪箱采用1入2出結構,由3個離合器進行切換控制。
圖1為左推進系統示意圖,右推進系統與之對稱。正常航行時,由柴油機進行推進。主離合器J1嚙合帶動推進軸高速旋轉,PTO(功率輸出)離合器J2嚙合帶動軸帶發電機旋轉發電,PTI(功率輸入)離合器J3脫開。
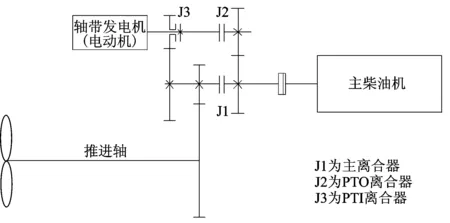
圖1 推進系統示意圖
船舶處于低速巡航時,為了節省能源降低排放采用單主機運行、柴電混合推進模式。船舶若一側推進系統進入主柴油機推進模式即PTO模式,另一側推進系統則進入電力推進模式即PTI模式,兩側的PTO、PTI模式可任意選擇以保證兩側柴油機均衡工作。
因軸帶發電機功率(本船為2 400 kW)遠小于柴油機功率,為了優化推進效率,PTI模式時推進軸進入低速旋轉,PTO側推進軸也進入低速旋轉。這樣兩側的推進軸以同樣轉速旋轉,防止主機過載和增加船舶操控性。
柴電混合推進的PTO側離合器狀態為:主離合器J1脫開,PTO離合器J2和PTI離合器J3嚙合;PTI側離合器狀態為:主離合器J1和PTO離合器J2脫開,PTI離合器J3嚙合。
2 電站組成
2.1電制
本船采用400 V 50 Hz 三相三線制絕緣系統。
2.2發電機
發電機主要包括3臺530 kW主柴油發電機、2臺2 400 kW軸帶發電機(電動機)、1臺100 kW應急發電機。
2.3配電板系統結構
配電板匯流排系統示意圖如圖2所示。圖中,SG1、SG2分別為左、右軸帶發電機;BS1、BS2、BS3為聯絡開關;QS為隔離開關;DG1、DG2、DG3分別為左、中、右柴油發動機。

圖2 配電板匯流排系統示意圖
2.3.1A匯流排
A匯流排由左軸帶發電機SG1供電,并對前艏側推及拖纜機供電。通過BS1聯絡開關與C匯流排相聯接,再經BS3聯絡開關與B匯流排相聯接。
2.3.2B匯流排
B匯流排由右軸帶發電機SG2供電,并對后艏側推及艉側推供電。通過BS2聯絡開關與D匯流排相聯接,再經BS3聯絡開關與A匯流排相聯接。
2.3.3C匯流排
C匯流排由左柴油發電機DG1供電,并對船舶部分日用負載供電。通過BS1聯絡開關與A匯流排相聯接,再經QS隔離開關與D匯流排相聯接。
2.3.4D匯流排
D匯流排由中柴油發電機DG2、右柴油發電機DG3供電,并對船舶部分日用負載供電。通過BS2聯絡開關與B匯流排相聯接,再經QS隔離開關與C匯流排相聯接。
3 柴電混合推進供電方式
船舶處于混合推進模式時,掛在C/D匯流排上的日用負載由柴油發電機供電,由PMS監管負載大小決定供電柴油發電機數量。
PTI側由PTO側獨立、直接供電,拖纜機和側推禁止運行。
2臺軸帶發電機可交互使用,即1臺軸帶發電機可作為PTI而由另1臺軸帶發電機供電。
圖3為SG1作為PTI使用的混合推進供電情況示意圖。
由于A、B、C樓生活污水設計管道按照3‰坡度至市政接入管道位置標高低約50 cm,同時還與DN 1000清水管標高一致并要穿過藥師弄馬路,需要避讓。故采取了提升方式,提升井尺寸為2 m×1.8 m×3 m(長×寬×高),提升泵選用自動攪勻潛水排污泵Q=30 m3/h,揚程10 m,功率3 kW,采用兩臺,互為備用,同時自帶配套控制柜。
在巡航速度較低情況下,主機功率和軸帶發電機功率較富裕,PMS可控制C/D匯流排由軸帶發電機供電,全船只有1臺主柴油機運行,從而達到最大節能減排效果。其供電示意圖如圖4所示。
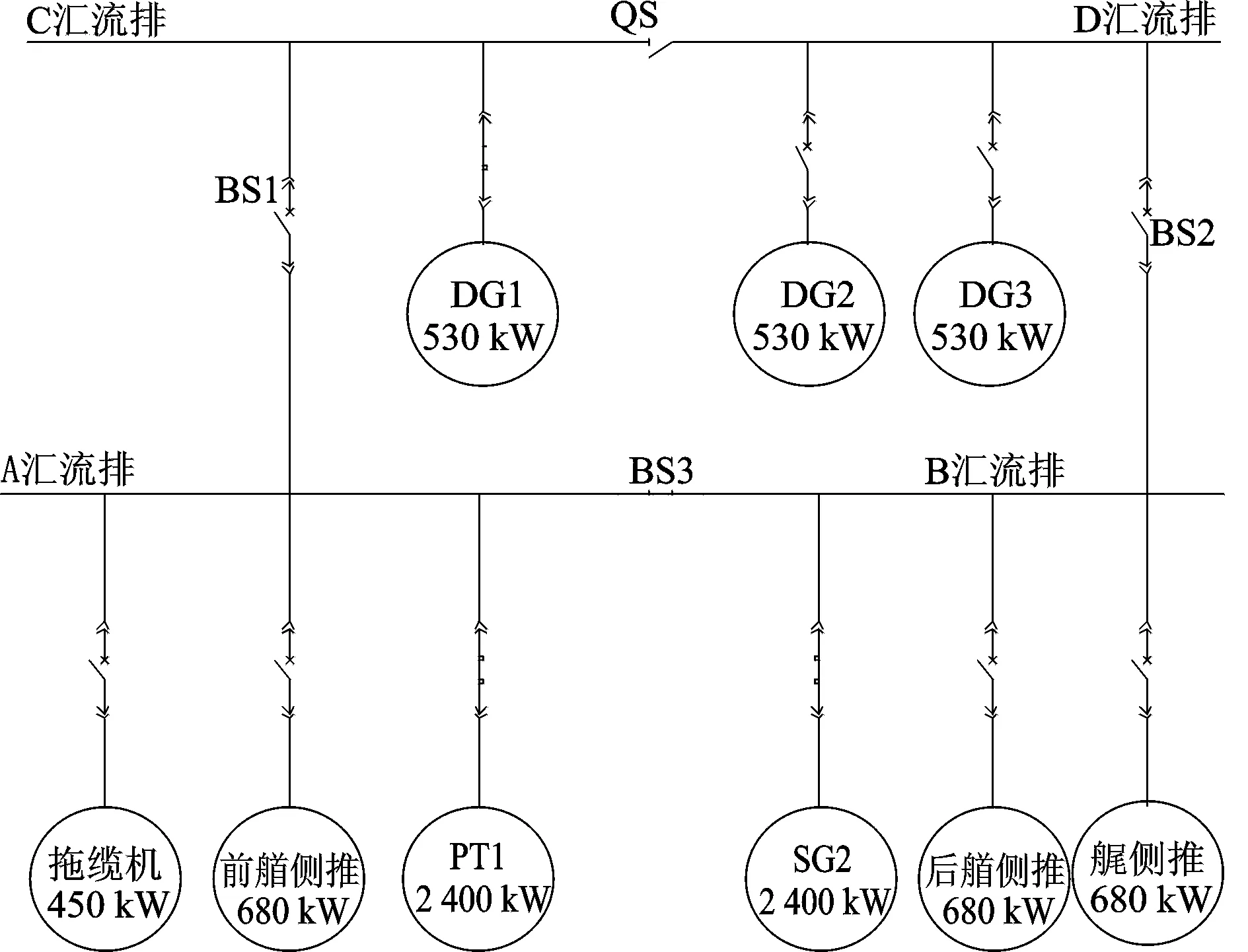
圖3 SG1作為PTI使用的混合推進供電情況示意圖
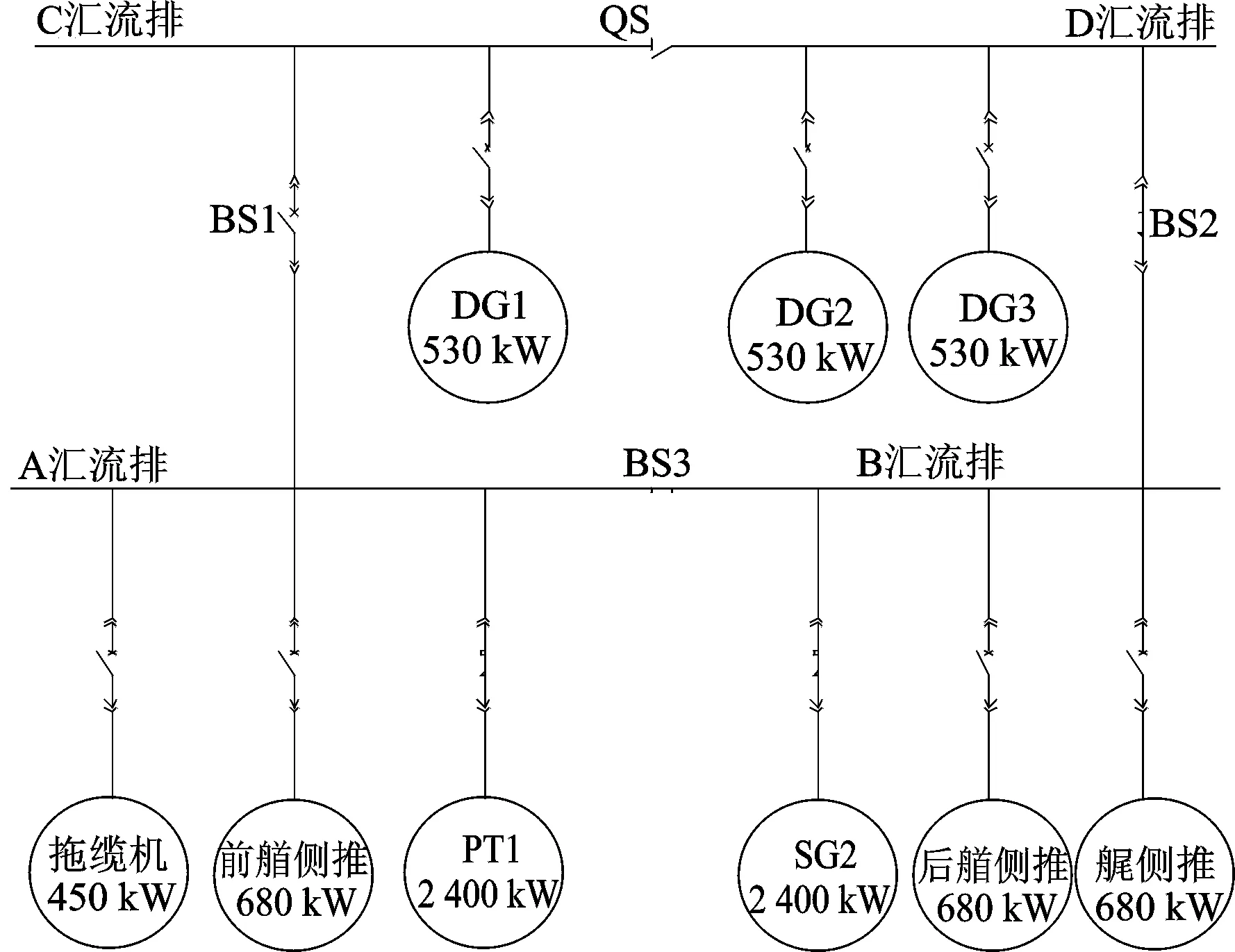
圖4 SG1作為PTI,SG2同時對全船供電示意圖
4 進入柴電混合推進模式的電站控制
柴電混合推進電站管理的重點是PTI的進入方式,也就是PTI側的電動機起動方式。目前采用的起動方式有自耦降壓起動、變頻起動、小電機起動等多種方式,這些起動方式有一個共同缺點就是成本高,占用空間大。本船的機艙特點是設備多,空間有限,無法采用上述起動方式。經綜合考慮,本船采用動態進入和靜態進入2種起動進入方式。
4.1動態進入
動態進入是由處于恒速運行狀態的左、右2臺主柴油機分別驅動兩側的軸帶發電機和推進軸運行,即PTI側處于動態。齒輪箱為切換到低速驅動推進軸模式:主離合器J1脫開、PTO離合器J2和PTI離合器J3嚙合。
在PMS管理下,將A/B匯流排與C/D匯流排分開(BS1、BS2分斷),C/D匯流排由柴油發電機供電,控制左、右軸帶發電機通過BS3并車運行。當并車完成后,PMS送一控制信號至主推進控制系統將PTI側的PTO離合器脫開,并送一信號控制PTI側的發電機進入電動機運行模式。此時可將PTI側的主機停機,船舶進入柴電混合推進模式。
此時船舶的驅動方式是:PTO側的主機低速驅動變距槳并帶動軸帶發電機發電,供給PTI側電動機(軸帶發電機)低速驅動變矩槳,船舶進入低速航行狀態。動態進入PTI的電流實測曲線見圖5。

圖5 動態進入PTI電流實測圖(Imax=595 A)
上圖是動態進入過程變距槳螺距為零時的電流曲線。由圖5可看出,動態進入非常平穩,沖擊電流很小。動態進入PTI的優點是起動平穩,沒有增加額外的硬件,成本低;缺點是必須雙側主機具備運行條件,如果單側主機出現故障船舶則無法進入柴電混合推進模式。
4.2靜態進入
為了解決動態進入的缺點,即在單主機運行情況下也能進入柴電混合推進模式,如單側主機故障或在錨地起航時起動單主機(避免起動雙主機的能源消耗),本船設計了PTI處于靜態(即停止狀態)時進入柴電混合推進的起動方式。
本船配備的軸帶發電機型號為DSU99K1-4。AVR調節器配置SR2-80限流模塊。
作為發電機使用時,如果激活SR2-80模塊,發電機的最大電流將會被限制,其最大電流值可以進行設定。同時該發電機設計了作為電動機用時可具有異步起動功能,即異步起動同步運行。
靜態進入前PTO側主推進系統的主柴油機處于恒速運行狀態,齒輪箱切換到低速驅動推進模式,即主離合器J1脫開、PTO離合器J2和PTI離合器J3嚙合;PTI側主柴油機處于停機狀態,齒輪箱的3個離合器均處于脫開狀態。
靜態進入柴電混合推進的電站控制完全由PMS自動管理。在靜態起動前,將C/D匯流排與A/B匯流排分開(BS1、BS2分斷),C/D匯流排由柴油發電機供電。控制PTO側發電機、PTI側電動機處于滅磁狀態,并將SG1、SG2進行電聯接即SG1/SG2主開關和BS3合閘。此時PTO側發電機未發電,PTI側電動機處于靜止狀態。
PMS控制PTO側發電機的限流模塊S2-80激活及勵磁線路接通并進行2~3 s的充磁,PTO側發電機開始發電,PTI側電動機開始異步起動。當PTI側電動機達到額定異步轉速時,PMS控制PTI側電動機勵磁線路接通拉入同步運行。其起動過程的實測電流曲線如圖6所示。
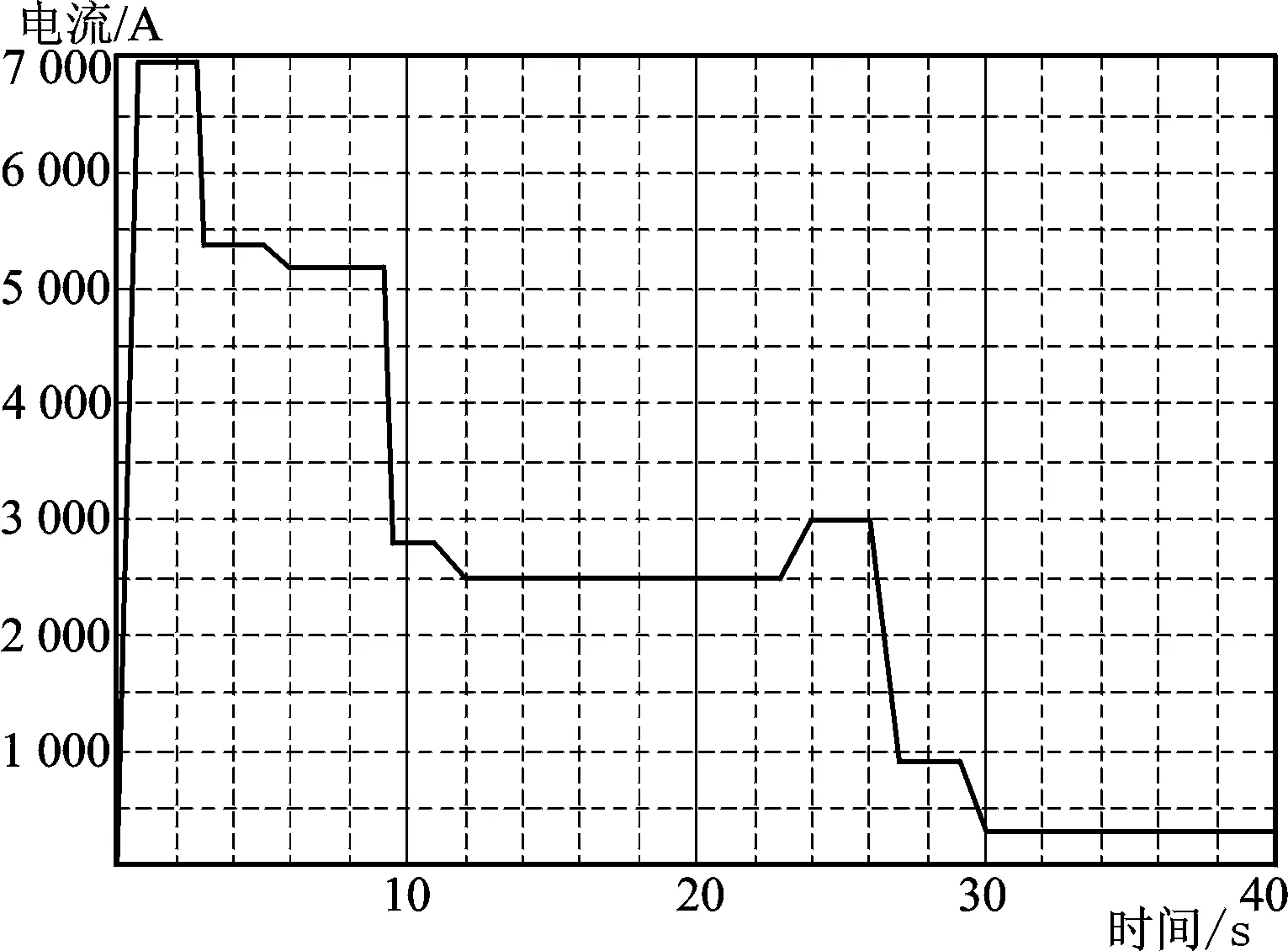
圖6 靜態進入PTI電流實測圖(Imax=6 947 A)
從電流曲線圖可知,在投入PTI模式的限流異步啟動開始時,發電機勵磁投入后,輸出電流瞬間升高至近7 000 A后不再升高。這個電流值是限流模塊在起作用,約為額定電流的1.6倍。
PMS檢測到PTI側電動機進入同步運行后將其控制在電動機運行模式并送一信號至主推進控制系統,控制PTI側齒輪箱的PTI離合器J3嚙合(合排)驅動推進軸旋轉。因驅動軸轉動慣量大,在合排時有一定的沖擊。合排電流實測曲線如圖7所示。
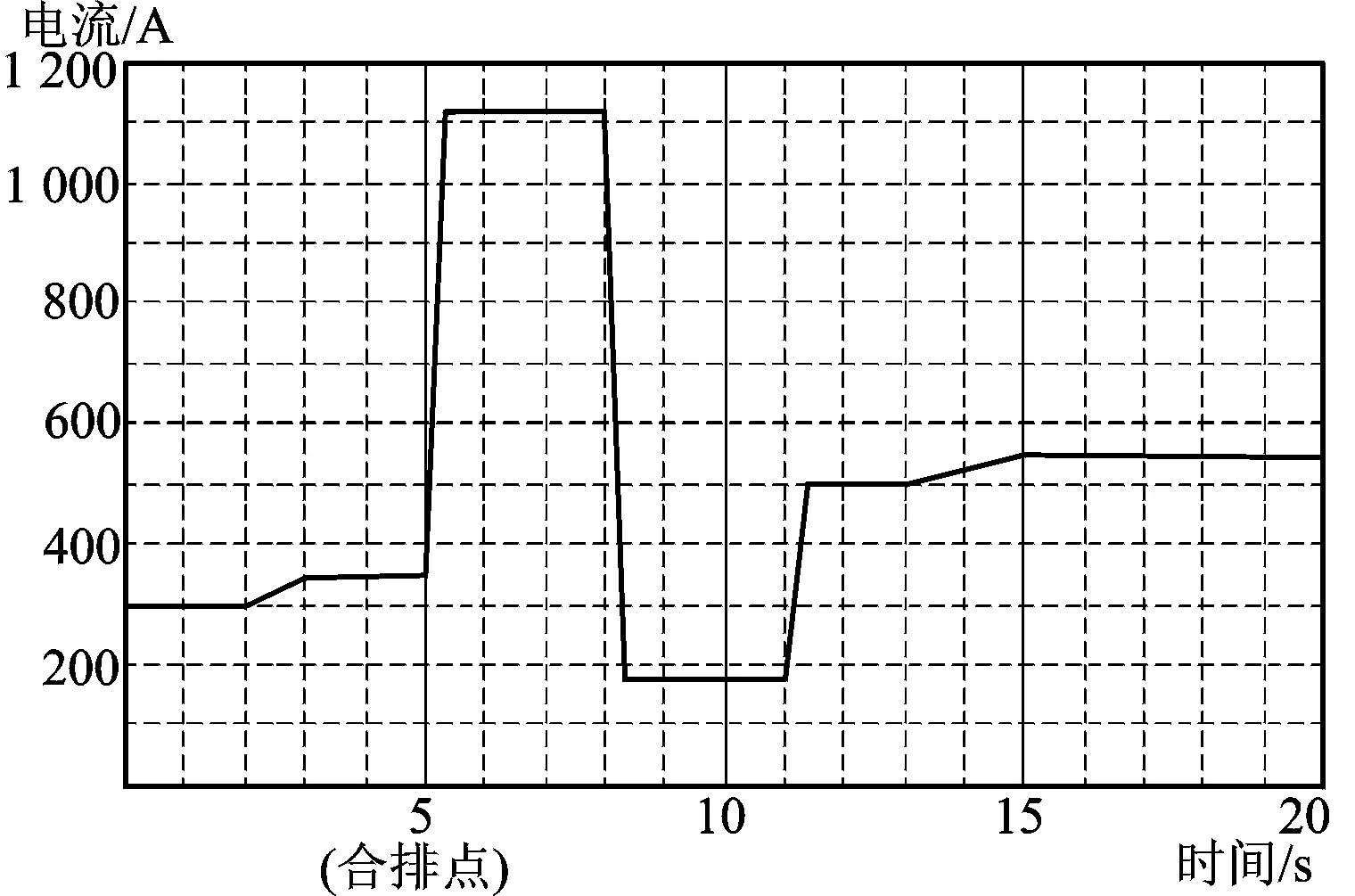
圖7 靜態進入PTI時合排電流實測圖(Imax=1 113 A)
5 柴電混合推進的保護
5.1發電機長延時保護
由圖7可知,在PTI靜態起動時雖然有限流功能但電流還是較大,發電機主開關的長延時保護如果按照正常設定,在PTI起動過程可能會誤跳閘。
為了解決發電機的正常保護和PTI靜態起動保護之間的矛盾,在功率管理模塊中增加發電機長延時保護功能,按規范要求進行設定。在靜態起動時將其關閉,在正常運行時打開。
5.2PTI運行時逆功保護功能抑制
在作為PTI運行時,其功率相對于發電機狀態時是反向的,也就是處于逆功狀態,這時須對逆功保護功能進行處理,否則PTI側的主開關將會因逆功而跳閘。常用方法是將電流互感器的2次電流信號用繼電器進行切換,使在PTI時測量系統不產生逆功。但互感器的容量較小,2次電流對電阻非常敏感。當繼電器觸頭的接觸電阻達不到要求時,整個測量系統包括電流、功率、無功、功率因數等與電流相關的電參量都會產生偏差,影響系統運行安全。為了提高系統運行的可靠性,本船在PTI運行模式時直接將逆功保護模塊的逆功保護功能關閉,使PTO、PTI逆功保護實現無縫切換。功率表則用+/-偏轉方式,當正向偏轉時是發電機,反向偏轉時是電動機。
5.3同步電動機的失磁保護
軸帶發電機在PTO運行模式時是同步發電機,在PTI運行模式時是同步電動機。同步發電機如果失磁(勵磁線路故障)其主開關會因失電或逆功(與其他發電機并車運行時)而跳閘。而同步電動機一旦失勵將立即進入異步運行狀態,工作特性變壞,功率因數和電效率嚴重下降。PMS系統根據這一特性用監測PTI運行的無功來進行保護。一旦發生失磁,系統發出報警,提醒操作人員排除故障或發出指令退出PTI系統。圖8為PTI在正常運行到失磁時的無功變化曲線。
6 結語
本系統中的靜態進入PTI運行時,當異步啟動完成后進行投勵時,存在時間點的控制問題。如果投勵時的轉子磁場和定子旋轉磁場相位角相差過大會產生很大的沖擊電流,本船實測到近9 000 A。雖然軸帶發電機廠家聲稱此沖擊電流在發電機可承受范圍之內,但此沖擊電流對整個系統還是有害的。要解決這一問題需要增加軸帶發電機的轉子磁場和定子旋轉磁場相位角檢測裝置。
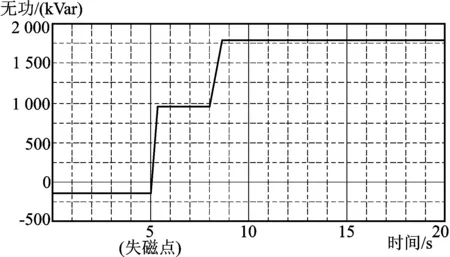
圖8 PTI運行時的失磁無功實測曲線(kVar)
柴電混合推進的難點是其牽涉到主機及主推進系統、主機遙控系統、發電機等,控制復雜、接口多、協調工作量大。由于8 000 kW海洋救助船柴油混合推進模式的前期經過了充分技術論證、精心準備和工廠模擬調試,在實船實驗時一舉取得了成功。但在整個柴電混合推進系統里的很多技術還是要依賴進口,如發電機的限流技術等。
在當今暢導綠色環保時代,對于經常執行低速航行任務的船舶如救助船、平臺守護船、海監船等,采用柴電混合推進是一個很好的節能方案,值得推廣應用。
[1]宋華屏. 16 400 t化學品船的PTI/PTO系統研究[J].江南集團技術,2003,(3):11-25.
[2]聶延生,劉鎮宇,劉運新,馬會普.船舶軸帶電機及其PTO/PTI工作方式的原理和應用[J].航海技術,2006,(4):42-43.
[3]柳青,張志田.同步電動機失步原因分析、產生的危害及防護措施[J].湖南工業職業技術學院學報,2001,1(2):6-8.
2014-05-24
王雙喜(1963-),男,高級工程師,從事船舶配電設計與研究。
U664.81
B
猜你喜歡
故事作文·高年級(2021年12期)2021-12-21 02:32:35
大電機技術(2017年3期)2017-06-05 09:36:02
軍事文摘(2016年16期)2016-09-13 06:15:49
廣西電力(2016年6期)2016-07-10 12:03:37
通信電源技術(2016年5期)2016-03-22 01:09:38
智能建筑電氣技術(2015年5期)2015-12-10 05:52:30
電測與儀表(2015年13期)2015-04-09 11:57:12
電測與儀表(2015年2期)2015-04-09 11:29:14
水電站機電技術(2014年6期)2014-09-26 12:07:48
水電站機電技術(2014年1期)2014-09-26 11:59:45
