一種鋰電池組無損均衡管理系統設計*
2014-09-06 10:50:32柳欽煌
電子器件 2014年4期
許 爽,孫 冬,柳欽煌
(1.中州大學信息工程學院,鄭州450044;2.上海大學機電工程與自動化學院,上海 200072;3.鄭州輕工業學院電氣信息工程學院,鄭州 450002)
?
一種鋰電池組無損均衡管理系統設計*
許爽1*,孫冬2,3,柳欽煌2
(1.中州大學信息工程學院,鄭州450044;2.上海大學機電工程與自動化學院,上海 200072;3.鄭州輕工業學院電氣信息工程學院,鄭州 450002)
摘要:針對動力鋰電池組充放電過程中,各單體電池之間存在的不一致性,設計了超級電容與雙向DC-DC變流器相結合的無損均衡管理系統。采用無跡卡爾曼濾波法估算鋰電池的荷電狀態,與通常采用的擴展卡爾曼濾波器進行了對比研究,經實驗驗證,本系統能夠快速、高效地實現鋰電池組的均衡控制,實現精確地鋰電池SOC(State of Charge)估計,提高了動力鋰電池組的可靠性和安全性。
關鍵詞:動力鋰電池組;能量無損均衡;無跡卡爾曼濾波;擴展卡爾曼濾波
電動汽車具有零排放、零污染、低噪聲等特點,成為今后我國大力發展的交通工具。鋰電池由于其高功率密度、單體電壓高等特性,是常用的電動汽車動力來源。動力鋰電池組中,單體電池的不一致性,會減少鋰電池組的有效能量,影響電動汽車的性能。因此研究可靠、高效的鋰電池組均衡管理系統,降低電池組中單體電池的差異性,保障動力鋰電池管理系統的可靠性和安全性,延長動力鋰電池組的使用壽命,對電動汽車有重大的意義[1-2]。
鋰電池組均衡管理系統是電池管理系統的重要組成部分,其目的是保證電池組中單體電池的荷電狀態相同,防止使用過程中由于過充、過放對單體電池造成的損害,降低鋰電池組的性能[2]。
目前,常用的鋰電池均衡電路主要分為2種:能量耗散型和非能量耗散型。能量耗散型的均衡電路最為簡單、可靠、成本低,即為每個電池并聯分流電阻,同時也具有能耗大、效率低、均衡速度慢、散熱困難等缺點[2];因而,有人提出了非能量耗散型均衡方法,開關電感、電容法,利用電感和電容作為儲能元件,開關電路作為電池組各單體電池的選擇控制,但該方法均衡速度慢、效率低,不適合快速充電場合[2-3];DC-DC變壓器法,可采用集中式控制,均衡速度快、效率高、適用各種場合,但變壓器設計難度大,漏感的問題也難解決;還有分散式均衡法,即為每個電池配備均衡電路,設計成本較高[4-5]。
綜合考慮以上因素,本文提出了超級電容與DC-DC電路相結合的方法,采用集中式控制的方式,既具有均衡效率高、速度快的特點,又適合各種場合、設計成本低等優點,并設計了與之相適應的均衡管理系統。
1 均衡系統方案設計
動力鋰電池組均衡系統設計方案如圖1所示。本系統中的動力鋰電池組由16節單體鋰電池串聯組成,每節鋰電池的最高電壓為3.65 V,最低電壓為2 V。系統通過實時檢測鋰電池的充放電電流、單體電壓、溫度等數據,微控制器對這些數據進行分析,計算各單體電池的荷電狀態SOC(State of Charge)。通過CAN通信將檢測信息上報給上位機系統,或將檢測信息存儲到EEPROM中,方便上位機系統翻查歷史數據進行動力鋰電池的維護;控制器采用飛思卡爾公司的汽車級控制器MPC5604B,以保證整個系統的實時性和可靠性。
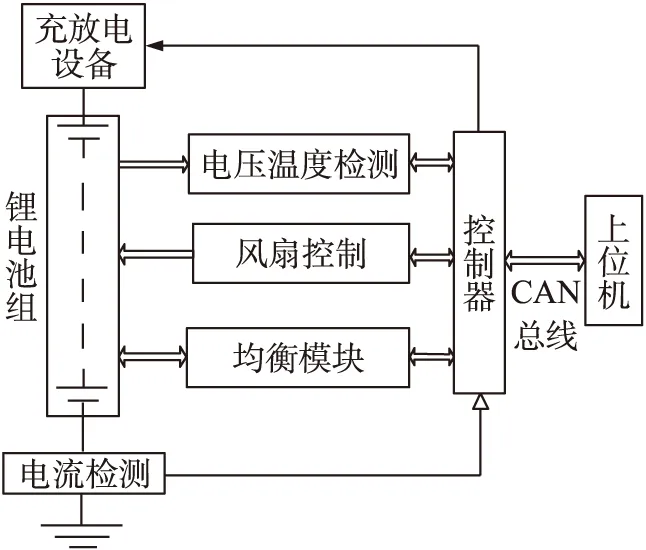
圖1 動力鋰電池組均衡系統設計方案
2 均衡模塊設計
2.1單體電壓檢測電路設計
鋰電池組的單體電壓檢測電路原理圖如圖2所示。16節電池分為上下2個8節電池組檢測,圖2為下8節電池電壓檢測,圖中M1、M2為模擬開關器件,M3為儀表放大器,通過控制器來控制選通U0~U8(8節電池順序排列的正負極),V1、V2為選通的一節電池的正負極電壓,M3檢測出的電壓送入ADC轉換器,即得到鋰電池組中各單體電池電壓值。采用本方案設計,可省去使用多個成本高的儀表放大器,選用2個模擬開關可避免放生電池短路,器件需選擇高電壓模擬開關和高共模電壓抑制比的放大器,例如美信公司的MAX14752。
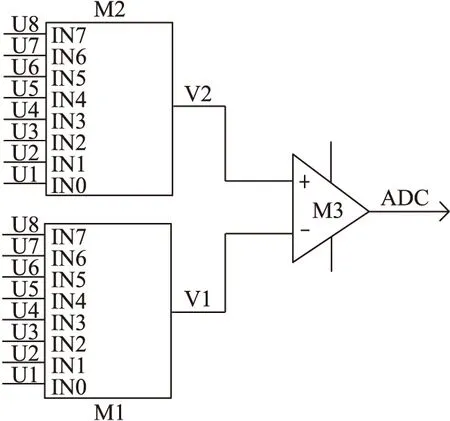
圖2 電池單體電壓檢測電路原理圖
2.2均衡主電路設計
鋰電池組均衡主回路電路原理圖如圖3所示,主要包括開關陣列和雙向DC-DC變換電路。開關陣列主要實現鋰電池的選擇,單刀繼電器K1~K16用來選擇單雙號電池,單刀雙擲繼電器Ka和Kb用來選擇單節電池;雙向DC-DC變換器電路可工作于Boost狀態和Buck狀態,Boost狀態下,由電池給超級電容充電,控制Q1可實現;Buck狀態下,由超級電容給電池放電,控制Q2可實現。
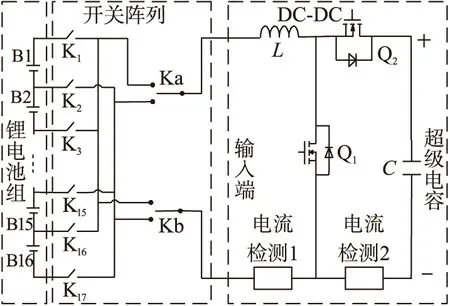
圖3 均衡主回路電路原理圖
2.3均衡管理控制策略
本文采用的均衡控制策略以鋰電池的SOC為控制目標,使鋰電池組中單體差異減小。
系統首先檢測各單體電池電壓、充放電電流、溫度等實時數據,根據這些信息計算各單體電池的SOC,并實時記錄鋰電池的SOC,當檢測到充放電結束,將記錄的各電池SOC求均值SOCAVG,以最大SOC和最小SOC值的差是否大于5%為依據,來控制均衡電路工作。通過控制開關陣列選擇SOC最大的單體電池,使雙向DC-DC工作于Boost狀態,以電荷ΔSOC=SOCMAX-SOCAVG為控制目標,控制均衡電流為5 A以內(根據具體的鋰電池選擇適合的均衡電流),采用安時法計算均衡的時間;同樣的方法,選擇SOC最小的電池,使雙向DC-DC工作于Buck狀態,均衡時間由安時法計算所得;繼續進行SOCMAX-SOCMIN>5%判斷,直到均衡結束。該程序的流程圖如圖4所示。
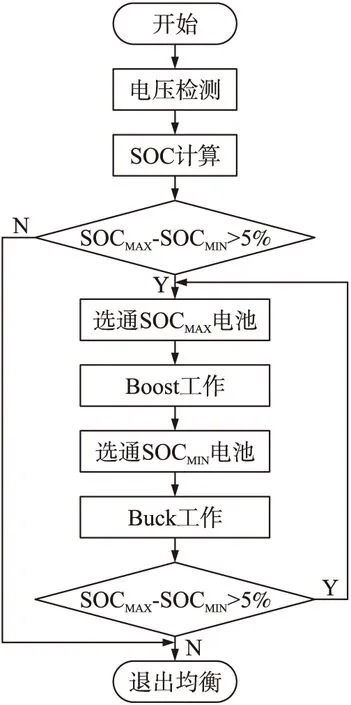
圖4 均衡控制程序流程圖
3 鋰電池的SOC估算
由以上的分析可以看出,本系統的均衡控制以各單體電池的SOC差異為目標,因此,精確地估算鋰電池的SOC非常重要。
常用的鋰電池SOC估算方法主要包括:安時法、開路電壓法、卡爾曼濾波法等。由于鋰電池非線性的特性,通常采用擴展卡爾曼濾波法(EKF)來估算SOC,但由于其需要將非線性部分采用泰勒級數展開線性化,所以估計誤差較大,本文設計了基于無跡卡爾曼濾波法(UKF)的SOC估算。
3.1鋰電池的等效模型
本文使用電池的Thevenin等效電路模型,如圖5所示。其中UL為負載電壓,Uoc為鋰電池開路電壓,Ro為鋰電池的歐姆電阻,Rp和Cp為鋰電池的極化電阻和極化電容。
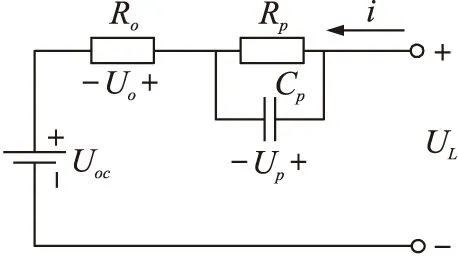
圖5 鋰電池Thevenin等效電路模型
根據模型電路,可建立Thevenin模型的狀態方程,將該方程離散化,可得到鋰電池的離散系統方程,如式(1)所示
(1)
其中η為電池庫倫效應系數,CN為電池的額定容量,Ts為系統的采樣時間,系統狀態變量為X(k)=[Up(k)SOC(k)]T,系統輸入為電流I(k),系統輸出為端電壓UL(k),開路電壓Uoc為SOC的函數。
3.2基于UKF的SOC估算
UKF的核心是一種UT非線性變換,該變換可使估計精度達到泰勒級數四階的精度,明顯高于EKF的二階精度[6-7]。
估算程序的設計步驟如下[8-9]:
(1)確定系統初始狀態,sigma點和權值計算
(2)
(3)
其中L=2為系統的階數,λ=α2(L+δ)-L為控制參數,α為sigma點的分布狀態,δ=0,β=2為非負權系數,P為協方差。
(2)狀態預測和先驗狀態估計
X(i)(k+1|k)=f[k,X(i)(k|k)]
(4)
(5)
其中f(·)為式(1)中所示狀態方程的表達式。
(3)協方差矩陣和先驗估計的sigma點計算
(6)
i=1,…,2L
(7)
其中Q為狀態方程中噪聲信號的方差。
(4)觀測值預測和協方差矩陣計算
(8)
(9)

(10)
其中g(·)為式(1)中觀測方程的表達式,R為觀測噪聲的方差。
(5)協方差矩陣和卡爾曼增益計算
(11)
K(k)=PXY(k)*[PY(k)]-1
(12)
(13)
P(k+1|k+1)=P(k+1|k)-K(k)PY(k)KT(k)
(14)
3.3UKF算法實驗驗證
使用MATLAB與ADVISOR汽車仿真軟件相結合的方法,將UDDS工況用于鋰電池的測試實驗,保證鋰電池充滿電,進行1次UDDS循環放電,實時記錄鋰電池電壓、電流和溫度等工作參數。
采用EKF和UKF2種方法對鋰電池SOC進行估計。對比測試波形如圖6所示,圖6(a)為UDDS工況波形,圖6(b)、6(c)是2種方法的對比曲線。EKF估計的誤差為4.5%左右,而UKF估計的精度可達到2%之內。
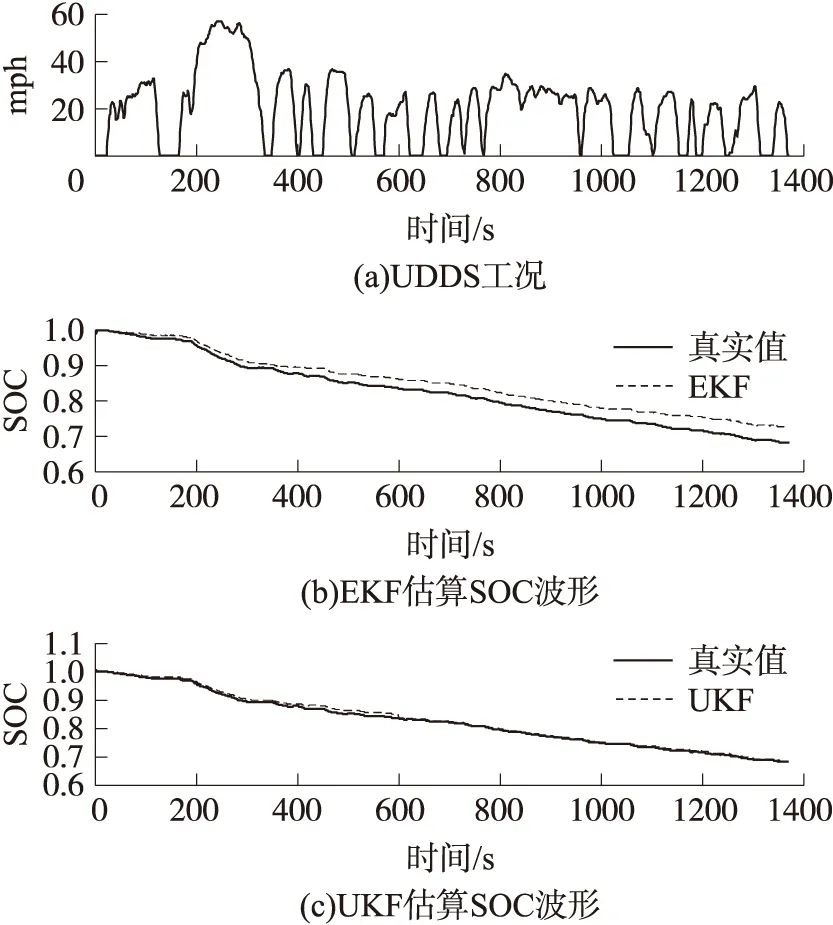
圖6 鋰電池SOC估計實驗波形
4 結論
(1)本文設計了以超級電容和雙向DC-DC變換器相結合構成的鋰電池組均衡管理系統;
(2)實驗證明,本均衡管理系統實現了鋰電池組的無損均衡控制,其實驗結果對比如圖7所示;
(3)設計了基于UKF的鋰電池SOC估算方法,該方法由于采用UT變換,比EKF法具有更高的估計精度,經實驗驗證,鋰電池的SOC估計精度可達2%以內,保證了均衡系統的高速、高效地運行,提高了動力鋰電池組使用的可靠性和安全性。
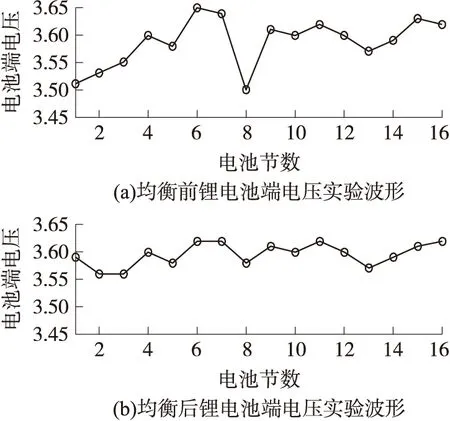
圖7 均衡前后實驗對比波形
參考文獻:
[1]曹志鵬,王健.便攜式儀表鋰電池充電管理和電量檢測的實現[J].電子器件,2010,33(1):97-100
[2]李娜,白愷,陳豪,等.磷酸鐵鋰電池均衡技術綜述[J].華北電力技術,2010(2):60-65.
[3]符曉玲,商云龍.電動汽車電池管理系統研究現狀及發展趨勢[J].電力電子技術,2012,45(12):27-30.
[4]羅玉濤,張智明,趙克剛,等.一種集散式動力電池組動態均衡管理系統[J].電工技術學報,2008,23(8):131-136.
[5]徐順剛,鐘其水,朱仁江.動力電池均衡充電控制策略研究[J].電機與控制學報,2012,16(2):62-65.
[6]Gregory L Plett.Sigma-Point Kalman Fltering for Battery Management Systems of LiPB-Based HEV Battery Packs Part 1:Introduction and State Estimation[J].Power Sources,2006,161:1356-1368.
[7]Gregory L Plett.Sigma-Point Kalman Fltering for Battery Management Systems of LiPB-Based HEV Battery Packs Part 2:Simultaneous State and Parameter Estimation[J].Power Sources,2006,161:1369-1384.
[8]石璞,董再勵.基于UKF濾波的自主移動機器人鋰電池SOC估計[J].儀器儀表學報,2006,27(6):1298-1320.
[9]高明煜,何志偉,徐杰.基于采樣點卡爾曼濾波的動力電池SOC估計[J].電工技術學報,2011,26(11):161-167.

許爽(1978-),女,漢族,河南省鄭州市,中州大學信息工程學院講師,碩士研究生,研究方向為計算機應用,xsh-01@163.com。
ANovelSchemeofNon-DissipativeEqualizationManagementSystemforLithiumBatteryPack*
XUShuang1*,SUNDong2,3,LIUQinhuang2
(1.Institute of Information Engineering,Zhongzhou University,Zhengzhou 450044,China;2.School of Mechatronics Engineering and Automation,Shanghai University,Shanghai 200072,China;3.College of Electric and Information Engineering,Zhengzhou University of Light Industry,Zhengzhou 450002,China)
Abstract:According to inequality of each single battery in charge and discharge process,a non-dissipative equalization system is introduced for the power lithium battery pack,which is comprised of super capacity and bidirectional DC-DC converter.Adopting unscented Kalman filter to estimate batteries state of charge,and a comparative study is introduced by using extended Kalman filter.Experiments show that this system can equalize the battery energy quickly and efficiently,achieve the accurate SOC(State of Charge)estimation of battery,and improve the reliability and security of the lithium battery pack.
Key words:power lithium battery pack;energy non-dissipative equalization;unscented Kalman filter;extended Kalman filter
doi:EEACC:841010.3969/j.issn.1005-9490.2014.04.047
中圖分類號:TN710
文獻標識碼:A
文章編號:1005-9490(2014)04-0799-04
收稿日期:2013-11-09修改日期:2013-12-05
項目來源:國家863高技術基金項目(2011AA11A247)