高精度低噪聲MEMS陀螺儀電容讀出電路*
2014-09-06 10:47:47唐興剛龍善麗
傳感技術學報 2014年9期
唐興剛,龍善麗,劉 艷
(北方通用電子集團有限公司,江蘇 蘇州 215163)
?
高精度低噪聲MEMS陀螺儀電容讀出電路*
唐興剛*,龍善麗,劉 艷
(北方通用電子集團有限公司,江蘇 蘇州 215163)
在研究電容式微機械陀螺信號通路工作原理的基礎上,分析了影響電容式讀出電路精度的各種非理想因素并進行了量化計算,設計了一款低噪聲電容讀出電路。該芯片采用高頻調制原理實現了低頻噪聲的轉移,同時提出了一款具有高電源抑制比的低噪聲運算放大器,采用連續時間的電容讀出方法研制了微機械陀螺ASIC電路。該芯片采用0.5 μm CMOS工藝,芯片面積為3.5mm×3.4 mm,測試結果表明,該單片ASIC的輸出級噪底為-117 dB,當陀螺儀量程為±300°/s時,分辨率可以達到0.00035°/s。
MEMS陀螺儀;低噪聲;解調;電荷放大器;讀出電路
陀螺儀是一種用于測量角速度的慣性傳感器。其廣泛應用于自動穩定控制系統、慣性導航系統、汽車牽引控制系統、相機影像穩定系統和機器人控制系統等等[1-2]。雖然光纖陀螺因其精度高而常被人們用于航空、航天等領域,然而,其高昂的價格也限制了它的廣泛應用[1]。MEMS陀螺具有體積小、重量輕、可靠性高、易集成等諸多優點[3],在商業和民用等領域逐漸成為當今主流的角速度檢測傳感器。
微機械陀螺的種類很多,按檢測方式可以分成電容式、壓阻式、壓電式、光電式以及隧道式陀螺等[4]。電容式微機械陀螺因其具有體積小、重量輕、溫度特性好以及噪聲抑制能力強等優點而被廣泛應用。其檢測電路通常采用以下幾種方式實現:開關電容電荷積分電路,連續時間電流模式電路以及連續時間電壓模式電路[5]。本文設計了一款連續時間電壓模式的高精度低噪聲MEMS陀螺儀電容讀出電路,電路采用標準的0.5 μm CMOS工藝,通過對各種噪聲進行量化分析,找出影響電路噪聲性能的主要因素,并采用調制/解調技術對電路性能進行優化設計,從而實現對陀螺儀微弱信號的檢測。
1 系統結構
本文采用的是單支點準懸浮解耦式角振動環式結構設計。圖1為陀螺結構模型圖,該結構由一個驅動外環和一個檢測內盤組成,驅動外環通過4個懸臂梁與檢測內盤連接,而內盤也通過4個懸臂梁與中心錨點連接,整個結構通過中心錨點懸在基片之上。由于外環與內盤被兩組懸臂梁隔開,因而激勵與檢測模態的自然頻率相互隔離,從而最大限度地減小了正交誤差,圖中M0、M90、M180、M270為四相位驅動電極,MA、MB為驅動檢測電極,NA、NB為正交誤差消除電極,該陀螺諧振頻率為5.8 kHz,帶寬為100 Hz。工作時,由四相位驅動信號對陀螺外環進行驅動,使外環在梳齒狀電極的驅動下繞Z軸旋轉振動,當有一個繞X軸方向的角加速度時,陀螺將受到一個沿Y方向的科氏力作用,內盤將沿Y方向左右擺動,而擺動幅度將與科氏力大小成正比。
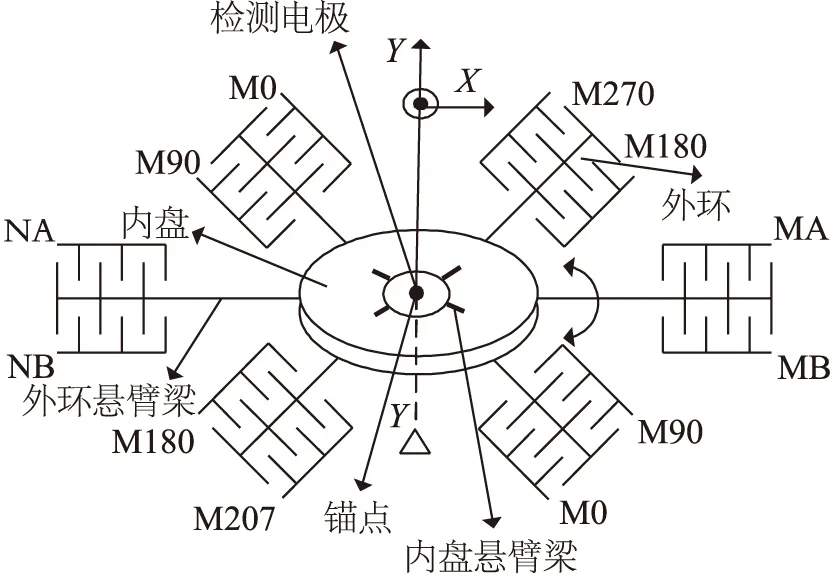
圖1 單支點角振動式陀螺儀結構模型圖
圖2為陀螺內盤檢測通道的原理框圖,左半部分為陀螺的敏感結構,右半部分為電容讀出電路的前端放大部分,當陀螺儀角速度發生變化時,由于科氏力的作用,在與角速度垂直的方向上產生等比例的位移,該位移的變化將引起圖中檢測電容CS1、CS2的變化并產生與之成比例的電流。
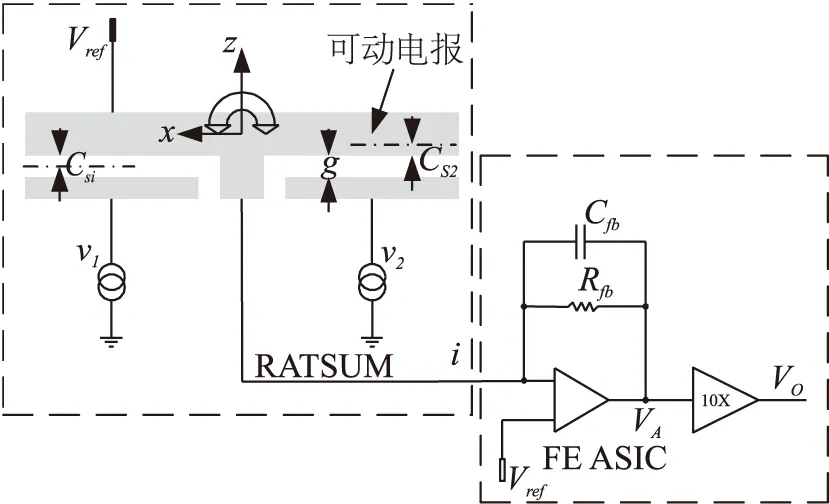
圖2 陀螺檢測通道原理框圖
因此,在檢測電路第1級電荷放大器輸出電壓VA為:
(1)
2 電路噪聲分析
由于陀螺傳感器輸出信號十分微弱,對讀出電路的噪聲、靈敏度和器件的匹配性都提出了很高的要求。其中影響電路精度的噪聲源主要有以下幾種:①輸入MOSFET的熱噪聲;②反饋電阻的熱噪聲;③輸入MOSFET的1/f噪聲;④參考電源Vref產生的參考噪聲;⑤反偏二極管漏電流產生的散粒噪聲;⑥電路其他部分產生的噪聲[5-6]。
其中電路其他部分產生的噪聲為電路內部諸如高頻時鐘等通過電容或電感等耦合過來的噪聲,其大小可通過合理的版圖設計如適當增加dummy管等方法避免。
圖3為采用連續時間電壓模式檢測電路結構。其中CS1和CS2為陀螺檢測端電容,大小為CS,D1、D2為輸入端ESD內的反偏二極管,D3、D4為運放輸入對管內的寄生反偏二極管,Cp為電路輸入端總的寄生電容,其主要由MOSFET的柵電容Cgd和gs以及陀螺傳感器和檢測電路連線上的寄生電容組成,Ileak為運放第1級輸入端的漏電流,其主要由ESD內的反偏二極管的漏電流之差以及運放輸入對管中的反偏寄生二極管的漏電流組成,Cfb為電荷放大器的積分電容,Rfb為電荷放大器的反饋電阻。
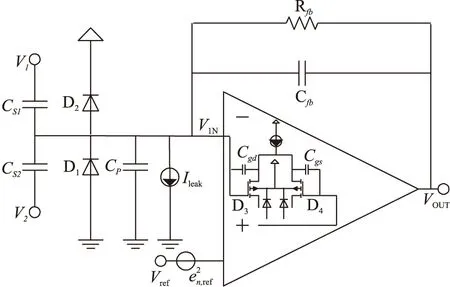
圖3 連續時間電壓模式檢測電路寄生影響
(2)
反饋電阻產生的熱噪聲在Vout處大小為[5]:
(3)
由于MOS管內存在反偏的寄生二極管,其在大多數電路中漏電流小于1 pA,因此通常被忽略,但在本文中,由于陀螺傳感器的檢測電容很小大約為10-15F~10-18F[7],因此導致該漏電電流不能被忽略。在檢測端散粒噪聲電壓主要包括兩部分,運放寄生二極管的漏電以及輸入端口處對電源和地的ESD保護結構中,二極管漏電特性不匹配或二極管大小不對稱產生的泄漏電流之差,其大小為:
(4)
由該表達式可知,散粒噪聲隨頻率衰減極快,在低頻時會成為噪聲的重要部分,但在高頻時,其大小將可忽略。因此,散粒噪聲決定了調制信號的頻率下限。
(5)
其中W和L是輸入MOSFET的溝道寬度和長度,gm是輸入管的跨導,ID是其偏置電流,k是波爾茲曼常數,T是絕對溫度,μ是載流子遷移率,COX是單位面積柵電容,K是閃爍噪聲系數,q是電子電荷,f是電路工作頻率。
該噪聲在電荷放大器輸出端的大小為:
(6)
因此,電荷放大器輸出端總噪聲大小為:

(7)
從上式可以看出,電荷放大器輸出端噪聲受熱噪聲、閃爍噪聲、散粒噪聲等諸多因素影響,其在低頻和高頻時反映不同的特性。在低頻時電路受散粒噪聲和閃爍噪聲影響較大,然而該類噪聲受頻率影響極大,當電路工作頻率升高時,噪聲迅速衰減,當頻率大于轉角頻率fC時,電路中起主要作用的噪聲僅剩下白噪聲。此時噪聲大小可簡化為:

(8)
3 電路設計
圖4所示為本文設計的運算放大器的原理圖,運放采用PMOS管輸入的折疊共源共柵結構,輸出級采用了AB類輸出結構,可以很容易實現軌到軌輸出。補償電容通過共源共柵級連接到運放輸出端。但是該電路的一個顯著缺點是其電源抑制能力差,為改正這個缺點,我們在電路中加入跨導線性環,這種結構使得輸出電流只與器件寬長比有關而與電源電壓無關,有效的提高了電路的電源抑制比。同時為了進一步提高該運放的電源抑制比,該運放采用單獨低壓差線性穩壓器(LDO)供電,LDO采用圖5所示電路結構,通過該模塊的使用,有效地將易受干擾的讀出電路第1級與電路其他模塊隔離開來,進一步提高了電路精度。
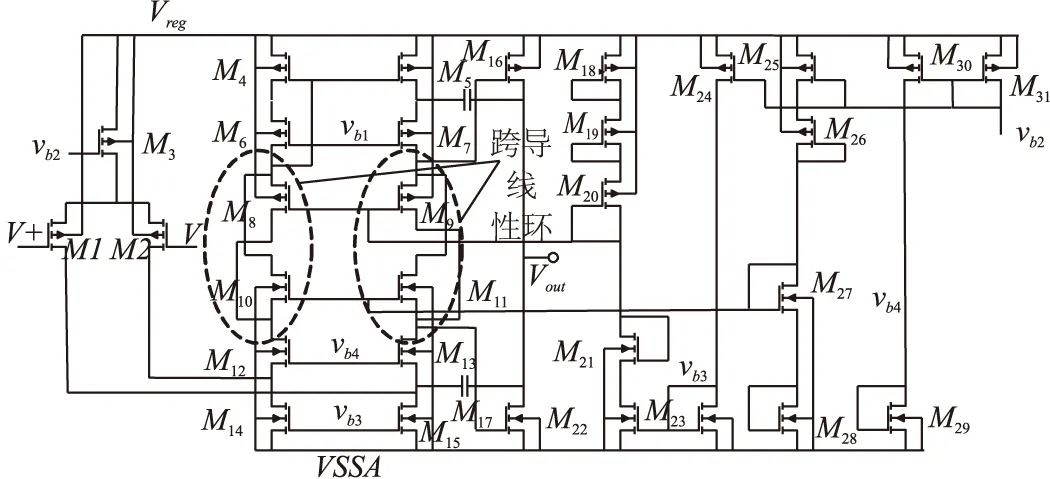
圖4 低噪聲跨導放大器
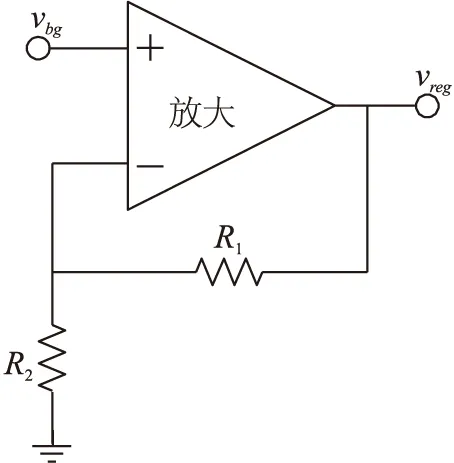
圖5 線性LDO
對于該運放來說,當增大尾電流ID時,電路輸出端噪聲降低,然而在很多場合里,電路對功耗的要求甚至高于對電路噪聲的要求,采用增大電路功耗的方法來換取低噪聲在很多情況下是不合適的。為了降低運放噪聲的影響提高電路精度,必須增大電路的寬長比,而寬長比的增大將會占用更大的芯片面積增加成本,同時,由于電路寬長比的增加,其輸入端寄生電容Cp也隨之增大,電路的線性度會隨之變差,因此,為了使電路性能達到最優,取MOS管的溝道長度L為工藝所能達到的最小工藝尺寸,W則根據實際情況適當增大。表1為本文設計的低噪聲運算放大器的技術指標。從中可以看到,該運放在5.8 kHz時具有7.82 nV/√Hz的等效輸入噪聲,電源抑制比在30 kHz時,仍能達到112 dB,雖然LDO的使用降低了該運放的動態輸出范圍,但該電路作為讀出電路的第1級,其輸出動態范圍在陀螺±300 °/s量程時,仍能保持很好的線性度,并不影響信號的輸出。同時,為了使該電路能夠滿足陀螺較高工作速率要求,因此設計該運放具有80 MHz的增益帶寬積。
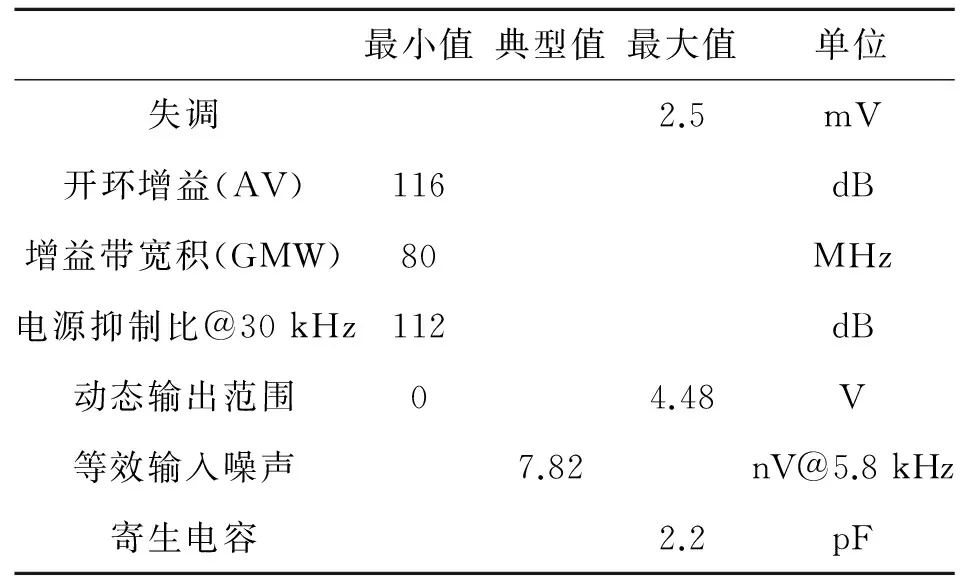
表1 低噪聲運算放大器技術指標
4 調制解調技術
從式(8)我們可以看到,電路噪聲受頻率的影響是極大的,當頻率升高時,電路輸出噪聲也會隨之減小,有鑒于此,本文采用調制/解調技術對讀出電路進行優化設計。
調制/解調技術的基本理念就是通過載波信號對MEMS陀螺儀產生的電流信號進行調制,利用載波信號和陀螺角速度信號的工作頻率不同,對信號進行有選擇的放大,并合理利用濾波技術對信號進行處理,最后保留放大的角速度信號輸出,完成整個信號處理過程[8]~[12]。
圖6為本文設計的高精度低噪聲電容讀出電路的設計框圖。
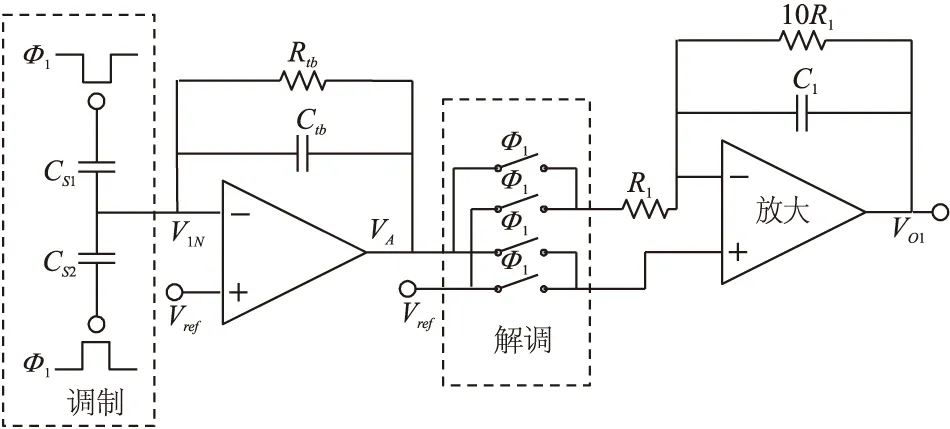
圖6 高精度低噪聲電容讀出電路的設計框圖
Ω為外加角速率,其大小等于:
Ω=cos(ωΩt)
(9)
其中ωΩ為角速率的變化率。
對MEMS陀螺儀產生的小信號進行調制,載波信號大小為:
fn=cos(ωnt)
(10)
其中ωn為載波信號的頻率。則檢測端電荷放大器的輸出為:VA∝2·Ω×V×fn=2cos(ωΩt)·cos(ωdt)·cos(ωnt)
(11)
對該信號進行兩次解調,第1次對載波信號cos(ωnt)解調,第2次對驅動信號cos(ωdt)解調,并采用濾波技術對高頻信號進行濾波,最終得到與低頻角速度信號成正比的輸出電壓VO。
VO∝cos(ωΩt)
(12)
采用調制/解調和濾波技術,我們可以將需要檢測的低頻角速度信號調制到高頻,利用電路在高頻時噪聲遠低于低頻時噪聲的特性將信號從噪聲中分離出來加以放大處理,有效提高讀出電路的精度。
5 封裝及測試結果分析
本文采用0.5 μm CMOS工藝,芯片面積為3.5 mm×3.4 mm,調制信號頻率為3 MHz。圖7為該讀出電路的芯片和版圖照片,將讀出電路與圖1的陀螺結構組裝在一起,采用低溫共燒陶瓷(LTCC)技術,實現其小型化。LTCC基板設計有半通空腔,敏感結構芯片、讀出電路組裝在LTCC基板的空腔內,通過基板、線鍵合實現敏感結構與讀出電路的互連,并在LTCC基板上設計可共晶焊接的金屬圍框,通過平行縫焊實現LTCC基板與金屬蓋板的氣密性封裝。MEMS陀螺儀組裝與封裝圖如圖8所示。
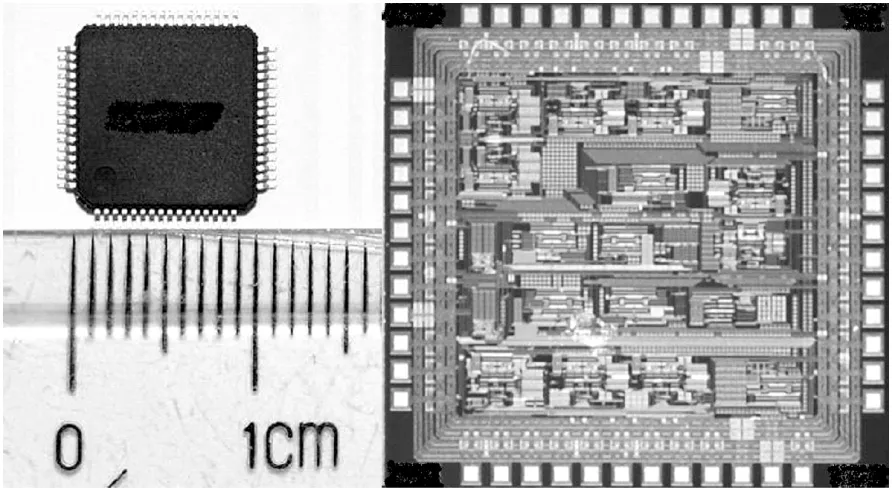
圖7 讀出電路芯片和版圖照片
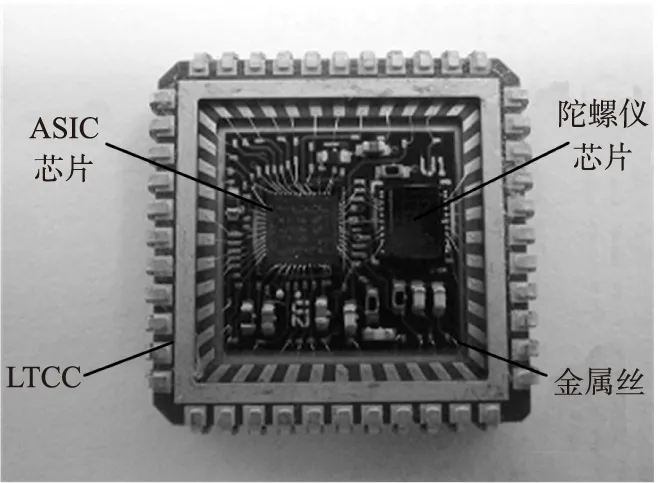
圖8 MEMS陀螺儀組裝與封裝圖
將該陀螺系統放在轉臺上進行聯合測試,并利用頻率分析儀RSA 5103A對電路輸出信號進行測量,結果如圖9所示。該電路的輸出端噪底為-117.14 dB,等效輸入電容噪聲為0.116 aF/√Hz當陀螺量程為±300 °/s,陀螺分辨率可以達到0.00035 °/s。
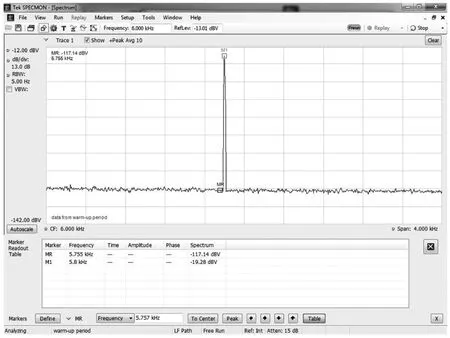
圖9 讀出電路第2級頻率響應曲線
本讀出電路采用連續時間C/V轉換加調制/解調技術,通過對前端運放的降噪設計,實現了整體電路的高精度低噪聲性能。與文獻中所列讀出電路對比如表2所示,從表2可以看到,與國內外采用相同工藝、實現相同電路功能的讀出電路相比,該電路在噪聲性能上得到了很大的提高。
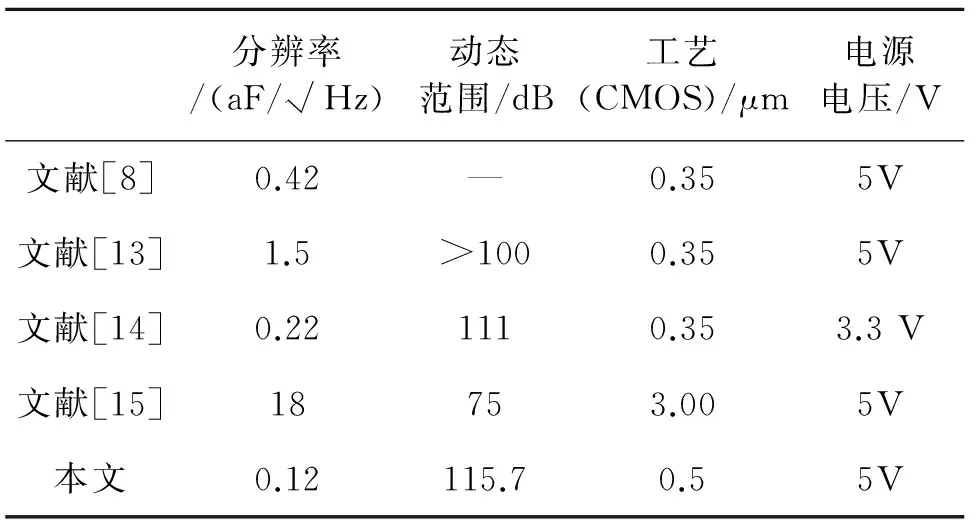
表2 本文中讀出電路與文獻中讀出電路對比
6 總結
本文對影響讀出電路精度的噪聲進行了量化分析,設計了一款高電源抑制比、低噪聲的運算放大器并采用調制/解調技術對電路性能進行優化,測試結果表明,該電容讀出電路的輸出級噪底為-117.14 dB,當陀螺儀量程為±300 °/s時,分辨率可以達到0.00035 °/s。
[1] Sheng-Ren Chiu,Chung-Yang Sue,Lu-Pu Liao,et al. A Fully Integrated Circuit for MEMS Vibrating Gyroscope Using Standard 0.25 μm CMOS Process[C]//Impact international Microsystems,Packaging,Assembly and Circuits Technology conference,2011:315-318.
[2]Jindeok Seo,Kyomook Lim,MEMS vibratory gyroscope with highly programmable capacitive interface circuit[C]//12th International Conference on Control,Automation and Systems,2012:1120-1130.
[3]李芊,徐劍蕓,魯浩,等. 一種通用的電容式微機械陀螺接口電路研究[J]. 航空兵器,2011(6):49-53.
[4]遲曉珠,崔健,閆桂珍. MEMS陀螺振動特性試驗技術[J]. 傳感技術學報,2008,21(4):559-562.
[5]梁亮. CMOS MEMS加速度計研究及低噪聲檢測電路集成設計[D]. 西安:西安電子科技大學,2010.
[6]拉扎維,模擬CMOS集成電路設計[M]. 西安交通大學出版社,2003.
[7]李錦明,高信噪比電容式微機械陀螺的研究[D]. 中北大學,2005.
[8]Tao Yin,Huanming Wu,Qisong Wu. A TIA-based Readout Circuit with Temperature Compensation for MEMS Capacitive Gyroscope[C]//Proceedings of the 2011 6th IEEE International Conference on Nano/Micro Engineered and Molecular Systems,2011:401-405.
[9]劉曉為,任軼超,譚曉昀. 適用于微機械陀螺接口電路的新型開關解調方法[J]. 傳感技術學報,2007,20(8):1805-1808.
[10]蔣慶華,苑偉政,常洪龍. 電容式微機械陀螺接口電路[J]. 傳感技術學報,2006,19(5):2223-2225.
[11]尹韜,楊海鋼,張翀. 一種用于電容型體硅微陀螺的低噪聲讀出電路芯片[J]. 電子與信息學報,2010,32(1):203-209.
[12]莫冰,譚曉昀,劉曉為. 電容檢測型微機械陀螺的信號檢測電路[J]. 儀器儀表學報,2005,26(8):324-326.
[13]吳其松,楊海鋼,張翀. 一種適用于MEMS陀螺儀的高性能電容讀出電路[J]. 儀器儀表學報,2010,31(4):937-942.
[14]Lasse Aaltonen,Antti Kalanti,Mika Pulkkinen. A 2. 2 mA 4. 3 mm2ASIC for a 1000 °/s 2-Axis Capacitive MICRO-Gyroscope[J]. IEEE Journal of Solid-State Circuits,2011,46(7):1682-1692.
[15]Yazdi N,Mason A,and Najafi K,et al. A Generic Interface Chip for Capacitive Sensors in Low-Power Multi-Parameter Microsystems[J]. Sensors and Actuarors,2000,A(84):351-361.

唐興剛(1981-),男,漢族,碩士,現為華東光電集成器件研究所工程師,主要研究方向為模擬集成電路設計,645133008@qq.com;

龍善麗(1981-),女,漢族,博士,現為華東光電集成器件研究所高級工程師,主要研究方向為混合集成電路設計,lslysy@163.com。
AHighPrecisionLowNoiseCapacitanceSensingCircuitUsedinMemsGyroscope*
TANGXinggang*,LONGShanli,LIUYan
(North General Electronics Group Co.,Ltd,suzhou Jiangsu 215163,China)
Based on the analysis of capacitive vibratory microgyroscope’s interface circuit a low noise capacitive readout circuit is presented. All kinds of non-ideal factors are discussed. A high power supply rejection ratio of a low-noise amplifier based on continuous time capacitance-to-voltage technique is presented in this paper. Using high frequency modulation principle,the circuit can improve the resolution and dynamic range by canceling 1/fnoise. This ASIC is designed and manufactured based on 0.5 μm analog CMOS process. The chip size is 3.5 mm×3.4 mm. Measurement shows that the capacitive readout circuit noise floor is -117.14 dB,When the gyro range is ±300 °/s,resolution can be achieved 0.00035 °/s.
MEMS gyroscope;low-noise;demodulation;charge amplifier;readout circuit
項目來源:(2014ZX01021101-002)
2014-06-14修改日期:2014-07-08
10.3969/j.issn.1004-1699.2014.09.008
TN432
:A
:1004-1699(2014)09-1191-05
猜你喜歡
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
藝術啟蒙(2018年7期)2018-08-23 09:14:18
電子制作(2018年11期)2018-08-04 03:25:42
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
海峽科技與產業(2016年3期)2016-05-17 04:32:12