測量機器人隧道施工自動變形監測的實現
2014-09-05 08:41:38鄭繼強朱坤奠
隧道建設(中英文) 2014年1期
范 本,鄭繼強,朱坤奠
(1.四川建筑職業技術學院測繪工程系,四川 德陽 618000;2.四川建筑職業技術學院土木工程系,四川 德陽 618000;3.成都云隆科技有限公司,四川 成都 610045)
測量機器人隧道施工自動變形監測的實現
范 本1,鄭繼強2,朱坤奠3
(1.四川建筑職業技術學院測繪工程系,四川 德陽 618000;2.四川建筑職業技術學院土木工程系,四川 德陽 618000;3.成都云隆科技有限公司,四川 成都 610045)
使用傳統測量儀器對隧道施工過程中隧道結構體進行變形監測時,數據采集、數據處理和預報過程相互獨立,很難及時反映隧道自身安全。為了解決這一問題,基于測量機器人的隧道自動變形監測進行了研究與實現,介紹了以測量機器人為變形監測儀器,通過光纖和網絡技術,使用VB編程語言和GeoCOM接口技術,采用SQL Sever數據庫,實現遠程控制測量機器人進行監測數據的自動采集和存儲,并由計算機自動進行數據分析處理、自動預警和報警,從而達到自動監測隧道變形的目的,為隧道施工提供安全保障。從整個系統的硬件組成、軟件構成及設計開發、成果處理及輸出等方面,分別進行了論述。提出的隧道施工自動變形監測思路和方法,對隧道信息化施工中自動變形監測具有積極的參考意義。
測量機器人;隧道施工;自動變形監測
0 引言
隧道在建設過程中會發生沉降、偏移等變形,對于變形嚴重或變形監測要求高的地段,如不進行自動的、實時的變形監測,則很難及時發現險情。目前,國內隧道變形監測主要以測量機器人為儀器實現自動化,控制機器人所使用的軟件主要有在線控制軟件GeoMoS[1]、ADMS[2]和機載軟件[3]。這些軟件并不是專門針對隧道監測開發的,不能體現隧道監測的特點。
本文以測量機器人為監測設備,根據隧道施工過程中監測點布設要求及監測特點,使用網絡技術遠程控制機器人,實現監測數據的自動處理、數據報表和手機短信預警等功能,完成了隧道變形監測各過程一體化操作工作。使基于測量機器人的自動變形監測技術成為保障隧道建設安全的重要措施。
1 功能需求分析
隧道建設過程中工作量巨大,各道工序交織進行,工作環境惡劣,地質條件復雜,需要對初期支護和二次襯砌后的隧道體的形變進行連續的監測。變形監測必須要快速、準確地完成測量數據的采集和處理,隧道內光線差、煙霧大、灰塵多等因素對變形監測工作也有一定影響。據此分析,隧道建設中自動變形監測應該滿足以下幾點要求[4]:
1)自動化。對系統進行一些設置和給定監測計劃后,儀器能夠進行全自動觀測,并對數據進行自動儲存。
2)智能化。實現自動變形監測,系統必須具有一定的適應復雜環境和處理問題的能力。
3)遠程控制監測數據的采集,并實時傳輸。隧道內環境差,對監測者身體健康有一定影響,同時隧道施工監測也有一定的危險性,因此要實現機器人的遠程控制。
4)數據處理。對采集到的原始數據按照設定的數據處理模型進行后處理,去除測量過程中引入的誤差,得到最符合實際變形的數據。
5)數據存儲和管理。對自動采集的大量原始觀測數據進行存儲和管理,并能夠對數據進行查詢和分析。
6)多樣格式的成果輸出。成果多格式自動報表輸出,便于存檔和向有關部門提交資料。
7)自動實時預警、報警。根據設定的限差實時預警、報警,能通過短信等形式發出預警信息。
2 監測系統構成
2.1 硬件系統
采用徠卡TM30測量機器人作為測量儀器。該儀器具有測量精度高、測量速度快、儀器穩定可靠等特點,能勝任隧道內全天候無間斷的工作。
2.2 軟件系統
根據隧道建設過程中施工及變形監測特點,編制了隧道自動監測系統。系統結構如圖1所示。
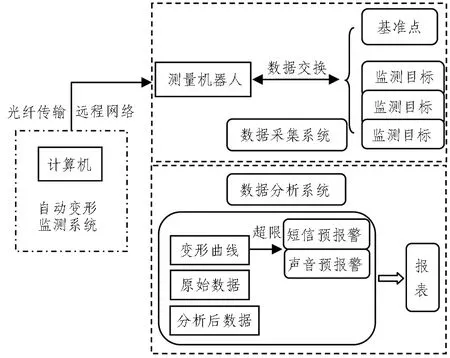
圖1 整體結構圖
2.3 系統的開發環境
系統以Visual Basic 6.0為開發平臺,通過調用徠卡測量機器人二次開發GeoCOM函數包來實現自動控制目的。有關函數可查看參考文獻[5]。
2.4 自動變形監測數據庫需求分析
數據庫需要實現以下主要功能:1)存入已知點點位信息;2)設置并保存定時規則;3)測量機器人控制信息的調用;4)合格數據的自動保存;5)對符合查詢條件的數據進行報表輸出。
主要數據流程如圖2所示。
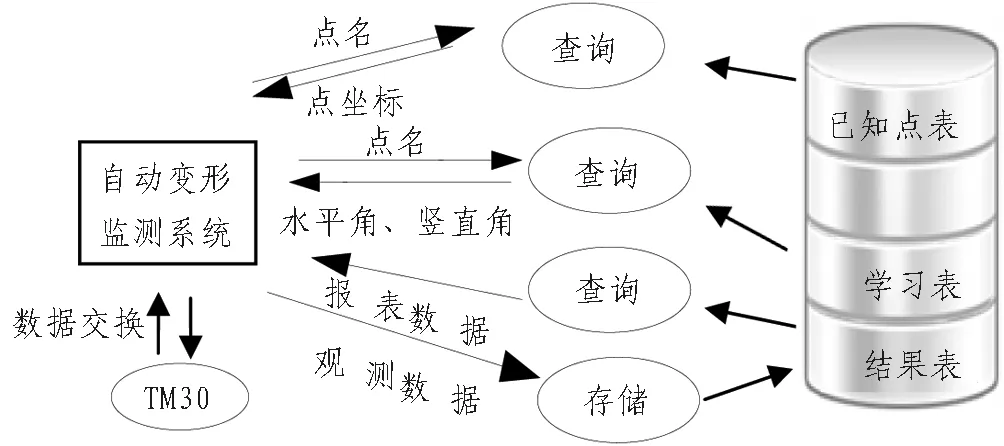
圖2 數據流程圖
2.5 點位布設及命名要求
隧道施工過程中的機械震動等條件會影響基準點的穩定性,因此基準點應每間隔一定的時間進行穩定性驗證,基準點應設置在遠離變形區或比較穩固的襯砌段,離測站距離120 m以上。
監測點按照相應規范按斷面進行布設,采用標準圓棱鏡作為照準物。為便于數據處理時自動匹配斷面,同一個斷面的監測點點名需包含相同信息,如可按里程標識,同一斷面拱腰收斂點命名為“左K1+667”,“右K1+667”,拱頂點命名為“拱頂K1+667”等。
距開挖斷面不同距離的點位對變形監測周期設置和限差要求不同,為了方便監測工作管理,對相同監測要求的點位進行編組處理,可命名“點組1,……”。監測點布置如圖3所示。
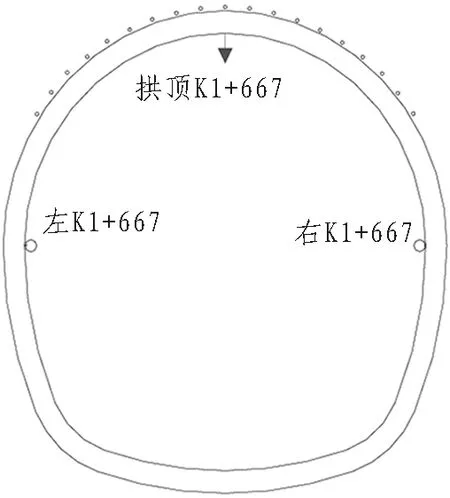
圖3 監測點布設示意圖
3 自動變形監測的實現[6]
3.1 數據采集系統整體結構
數據采集系統包含項目管理、設置模塊和測量模塊3個操作模塊,最重要的功能是實現變形監測的數據采集自動化。數據采集系統結構如圖4所示。
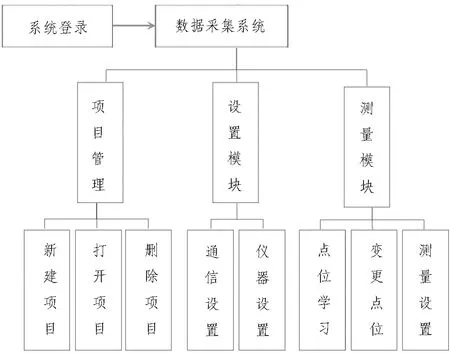
圖4 數據采集系統結構圖示
3.2 自動采集功能實現
3.2.1 初始值采集
此功能是把目標點的概略空間位置告訴測量機器人。采集的初始值為目標點相對于定向點的水平角和相對于測站的天頂距。
主要用到的函數如下:
1)搜索目標函數VB_AUT_Search2(0.2,1,0)。括號中的參數0.2和1分別代表儀器搜索水平角和天頂距范圍大小,單位是弧度。
2)精確瞄準函數VB_AUT_FineAdjust3(0.1,0.2,0),功能是使儀器精確照準目標。
3)測角測距函數。VB_BAP_MeasDistanceAngle(BAP_DEF_DIST,hz,v,distance)。BAP_DEF_DIST為默認的測距模式;hz為水平角;v為測得的天頂距;distance為斜距。測得的hz和v參數存儲在學習測量表中,兩者決定了目標點的概略空間位置。
圖5為測量機器人定位原理。由圖5可以看出測量機器人用相對于后視點的水平角和測站天頂距2個參數即可定位到目標點空間方向。由于變形監測中不允許同一個方向有2個目標物,所以由hz和v即可得到唯一的點位信息。
3.2.2 自動測量
自動測量是隧道自動化變形監測系統的核心功能,它的功能主要是指揮測量機器人按照定時設置進行自動測量工作。
用到的函數為VB_AUT_Make Positioning4_(hz,v,POSMode,ATRMode,bDummy)。函數中的參數hz和v為水平角和天頂距,即點位學習功能中所采集的2個值;POSMode參數含義為定位模式,即定位的方式,分快速定位和精確定位;ATRMode參數為儀器ATR自動識別目標模式,分定位水平角和豎直角以及搜索目標環境中的水平角和豎直角2種模式;bDummy參數為徠卡預留參數一般設為False。
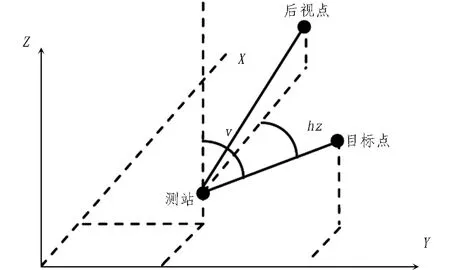
圖5 測量機器人定位原理
3.3 數據傳輸
徠卡TM30的數據傳輸提供了有線和無線2種通訊模式,測量機器人安裝在隧道內進行監測,限制了無線通信方式的使用,本研究采用光纖和網絡實現遠程傳輸。
測量機器人光纖傳輸方式是通過光端機(光調制解調器)將計算機RS232信號轉換成激光信號,在光纖中進行傳輸,到達測量機器人站點后,再由光端機(光調制解調器)轉換為標準RS232電信號,測量機器人再對RS232信號進行解析,響應的信息再通過光纖返回計算機,完成信號傳輸。使用光纖傳輸時,必須注意光纖跳線的接法,信號的傳輸必須交叉進行,即此光纖的TX(發)接對方的RX(收)、RX(收)接對方的TX(發)。測量機器人控制端和監測端使用光纖傳輸接線方式如圖6所示。
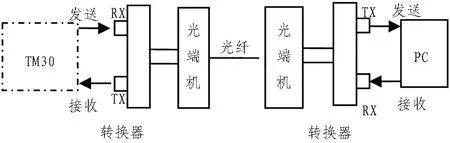
圖6 光纖連線方式
測量機器人通過電纜線與網絡轉換器連接,轉換器再連接到網絡交換機上,計算機控制端使用IP分配軟件對轉換器設置固定IP,在此局域網內的所有用戶都可以以此IP對機器人進行訪問。如果交換機連接入Internet,就可以對測量機器人實現超遠距離的控制。
4 數據處理
數據處理系統主要實現變形過程曲線的實時繪制、數據的后處理及數據報表和預報警功能。通過實時繪制變形曲線,能夠直觀、實時地查看變形情況;數據分析系統使用差分技術和小波分析對原始數據進行處理,消除或減弱測量誤差;預警系統對超限數據進行預報警,及時提醒隧道變形是否超限,確保隧道施工安全。
4.1 自動繪制過程曲線
存入數據庫中的數據為每個監測點的三維坐標,隧道工程主要監測拱頂沉降、拱腰收斂位移及沉降[7]。監測點沉降信息直接使用高程信息經過差分計算得到每期沉降量和累計沉降量值。收斂位移是通過同一斷面的左右拱腰點的平距變化來反映的,具體做法:1)查詢數據庫中有相同字符的“左xx”和“右xx”;2)計算2點平距;3)計算周期間平距差量,得出收斂位移變化量。
4.2 小波去噪
通過調用小波分析工具箱,實現小波去噪功能[8]。具體做法是:在Matlab環境內把所用到的小波函數編譯成M文件;使用Matcom把Matlab編寫的函數(M文件)編譯成VB可以調用的DLL文件;在VB中引用編譯的DLL文件,即可在VB中完全調用小波工具箱函數。為使Matlab函數脫離Matlab軟件運行環境,在VB調用Matlab函數過程中必須安裝MCR程序。
4.3 報表
系統采用VBA技術,通過調用Excel程序和SQL Sever數據庫中相關數據實現自動報表功能。根據隧道監測報表習慣設計報表格式,類型包含日報表、周報表和月報表。報表輸出界面截圖如圖7所示,收斂位移日報表截圖如圖8所示。
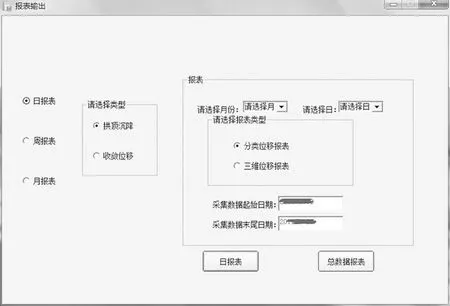
圖7 報表輸出界面

圖8 收斂值日報表截圖
4.4 預報
對數據庫中沉降及收斂值的累計變形量和變形速率按一定間隔時間進行查詢,根據設置的預報警值來“診斷”數據庫中的數據。出現超限值,以聲、光等方式報警,同時進行短信預警。
短信預警可以手動操作,也可以自動進行預警。自動短信預警的實現方法是:預警平臺實時監控數據庫中的累計位移和速率值,若出現超限數值,平臺狀態欄提示某某點數據不正常,并自動觸發短信發送模塊,把超限的點名和超出值自動發送給設置的接收手機號碼,使施工管理人員第一時間了解隧道變形情況。自動短信預警系統截圖如圖9所示。
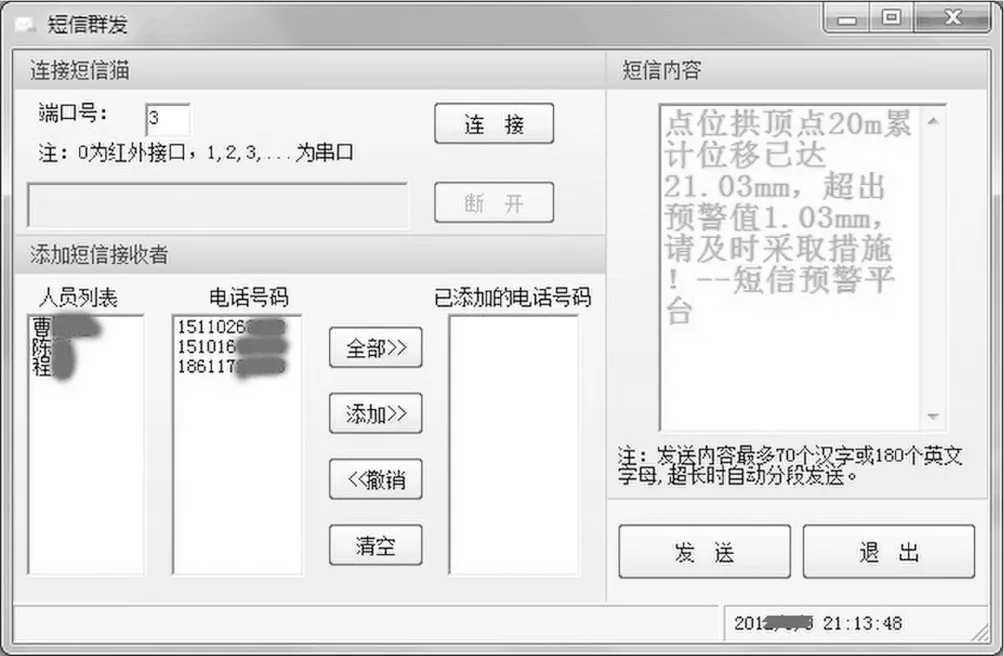
圖9 自動短信預警
5 應用驗證
系統在北京地鐵14號線土建某標采用暗挖法施工的某一施工通道的監控量測進行了驗證。通道采用直邊墻馬蹄形斷面,尺寸為4 m(寬)×4.3 m(高)。以徠卡TM30測量機器人為設備,監測點共安裝棱鏡12個,形成2組斷面,7個拱頂沉降觀測,儀器安放采用強制對中方式,采用光纖連接局域網遠程控制。
通過對監測點連續20 d的監測,結果與同時期人工方式監測對比顯示:本系統自動監測采集的數據同一點同一天若干次測量數據較差優于0.1 mm,數據采集穩定;拱頂沉降、拱腰沉降及收斂位移每天累計變化量普遍優于人工監測方式0.5~1 mm,監測精度可靠。
6 結論與建議
通過二次開發TM30測量機器人實現了隧道監測過程中的數據自動采集、遠程傳輸、自動處理和預警等功能,與同類型研究相比主要有以下幾點不同:1)數據采用光纖通訊支持下的網絡傳輸,實現了超遠程控制功能;2)采用短信自動預警方式,預警機制更及時、有效;3)數據自動報表功能,實現監測數據的一鍵輸出;4)數據采集、傳輸、儲存、分析、輸出、預報過程一體化。
但系統在應用中要注意以下問題:1)在小半徑曲線段通視距離短,可能增加全站儀,開挖面多的時候儀器投入較大;2)TM30 200 m處最小棱鏡分辨間距為0.3 m,拱腰監測棱鏡布置時要注意防止棱鏡遮擋。
此研究支持帶有ATR功能的徠卡其他型號測量機器人,如TCA2003、TPS1200系列和TS30等。系統主要應用于隧道施工過程的變形監測,也可以擴展應用到其他隧道建設及運營過程的變形監測中。
[1]尤相駿.徠卡新一代GeoMoS自動監測系統在城市地鐵變形監測項目中的應用[J].測繪通報,2007(1): 71-72.(YOU Xiangjun.The application of GeoMoS automatic monitoring system in city Metro tunnel deformation monitoring[J].Bulletin of Surveying and Mapping,2007(1): 71-72.(in Chinese))
[2]張書華,蔣瑞波.基于測量機器人的隧道變形自動監測系統的設計與實現[J].測繪科學,2009,34(3): 192-194.(ZHANG Shuhua,JIANG Ruibo.Design and implementation of automatic monitoring system in the tunnel distortion based on surveys robot[J].Science of Surveying and Mapping,2009,34(3): 192-194.(in Chinese))
[3]陳秀忠,錢林.地理數據通信接口技術在自動監測系統中的應用[J].測繪通報,2010(1): 42-44.(CHEN Xiuzhong,QIAN Lin.Application of GeoCOM interface technology in automatic monitoring system[J].Bulletin of Surveying and Mapping,2010(1): 42-44.(in Chinese))
[4]梅文勝,張正祿,郭際明.測量機器人變形監測系統軟件研究[J].武漢大學學報:信息科學版,2002,27(2): 165-171.(MEI Wensheng,ZHANG Zhenglu,GUO Jiming.Software of Georobot deformation monitoring[J].Geomatics and Information Science of Wuhan University,2002,27(2): 165-171.(in Chinese))
[5]Leica TPS1200+ Leica TS30/TM30 GeoCOM Reference Manual[K].Switzerland:Leica Geosystems AG,Heerbru-gg,2009.
[6]范本.基于測量機器人TM30技術地鐵隧道建設自動變形監測研究[D].重慶: 重慶大學土木工程學院,2012.(FAN Ben.The research of automatic deformation monitoring in subway tunnel construction based on TM30 Georobot technology[D].Chongqing:College of Civil Engineering of Chongqing University,2012.(in Chinese))
[7]中國有色金屬工業協會.GB50026—2007工程測量規范[S].北京: 中國計劃出版社,2008: 88-91.
[8]謝南,陳漢良.Visual Basic與Matlab的幾種接口編程技術[J].儀器儀表學報,2004(8): 571-574.(XIE Nan,CHEN Hanliang.Several ways to build interface programs based on Visual Basic and Matlab[J].Chinese Journal of Scientific Instrument,2004(8): 571-574.(in Chinese))
國內首創雙模式盾構在廣州下線
2013年12月19日,國內首創的2臺泥水、土壓雙模式盾構在廣州下線。該設備填補了國內相關技術空白,獲得國家專利,將用于廣州地鐵9號線的土建工程,以適應當地復雜地質條件施工的需要。據介紹,這2臺泥水、土壓雙模式盾構,每臺比以往整機進口的盾構大約可節省資金1 500萬元。據廣東華隧建設總經理趙暉透露,這種雙模式盾構從設計研發到生產下線用了一年多的時間。
(摘自 新民網 http://news.xinmin.cn/shehui/2013/12/20/23006337.html)
Georobot-basedAutomaticDeformationMonitoringinTunnelConstruction
FAN Ben1,ZHENG Jiqiang2,ZHU Kundian3
(1.DepartmentofSurveyingandMappingEngineering,SichuanCollegeofArchitecturalTechnology,Deyang618000,Sichuan,China; 2.DepartmentofCivilEngineering,SichuanCollegeofArchitecturalTechnology,Deyang618000,Sichuan; 3.YunlongTechnologyCo.,Ltd.,Chengdu610045,Sichuan,China)
The process of data acquisition,analysis,processing and risk forecasting in the traditional deformation monitoring in tunnel construction are independent.Therefore,the response to risks is always untimely.To solve this problem,the paper studies and implements Georobot-based automatic deformation monitoring in tunnel construction.The functions of automatic monitoring data acquisition and remote storage,automatic data analysis and early warning are realized by means of Georobot,Visual Basic,GeoCOM and SQL Sever database.The purpose of the automatic monitoring of tunnel deformation is achieved; the tunnel construction safety is guaranteed.The hardware structure,software design and result processing and output of the whole system are discussed in this paper.The idea and method of automatic deformation monitoring have positive reference significance for the deformation monitoring in tunnel construction.
Georobot; tunnel construction; automatic deformation monitoring
2013-10-18;
2013-12-05
范本(1986—),男,河南商丘人,2012年畢業于重慶大學,測繪科學與技術專業,碩士,助教,主要從事工程測量及變形監測的教學與研究工作。
10.3973/j.issn.1672-741X.2014.01.004
U 455.46
A
1672-741X(2014)01-0019-05
猜你喜歡
建材發展導向(2021年9期)2021-07-16 07:11:36
中華詩詞(2020年1期)2020-09-21 09:24:52
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
小學生作文(中高年級適用)(2018年5期)2018-06-11 01:22:56
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
中學生數理化·七年級數學人教版(2017年11期)2017-04-23 07:18:00
數學大王·中高年級(2016年12期)2016-12-26 21:37:36
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
中國房地產業(2016年2期)2016-03-01 01:25:48
