基于蟻群優化支持向量機的公路隧道圍巖變形預測模型及應用
2014-09-05 08:41:38邱志剛
隧道建設(中英文) 2014年1期
邱志剛
(新疆維吾爾自治區交通規劃勘察設計研究院,新疆 烏魯木齊 830006)
基于蟻群優化支持向量機的公路隧道圍巖變形預測模型及應用
邱志剛
(新疆維吾爾自治區交通規劃勘察設計研究院,新疆 烏魯木齊 830006)
為及時掌握隧道施工中圍巖變形趨勢以便采取措施加以控制,采用基于結構風險最小化的支持向量機(SVM)進行預測。介紹支持向量機的基本原理,研究蟻群算法(ACO)實現支持向量機參數優化的方法,構建ACOSVM模型。對某公路隧道隨機選取的2個監測斷面的預測結果表明,該模型預測精度較高,泛化性能較好,用蟻群算法進行SVM參數優選是一種簡單、優選的方法,可以有效指導隧道的施工。
隧道工程;圍巖;變形預測;支持向量機;蟻群算法;參數優化
0 引言
隧道開挖后,隨著初始地應力的逐步釋放,圍巖應力將重新分布,在此過程中隧道圍巖可能會發生變形。隧道圍巖變形預測是信息化監控設計與施工的重要環節,是判斷支護形式是否合理、支護設計參數是否恰當、隧道施工是否符合凈空限界要求以及了解運營后隧道長期穩定性的關鍵。在隧道施工階段,根據圍巖變形監測資料對其變形進行準確預測,可以判定圍巖的穩定狀況,及時調整開挖方法、支護形式和支護參數,及時發現和預報險情,并采取有效的應對措施,從而達到有效指導施工的目的。
目前,隧道圍巖變形預測模型主要有回歸模型[1-2]、灰色模型[3-5]、人工神經網絡模型[6-7]及支持向量機模型[8-11]等。其中,回歸模型本身參數難以識別;灰色系統要求累加生成的新數據列具有灰指數規律;人工神經網絡在學習樣本數量有限時,精度難以保證,學習樣本數量過多時,又陷入維數災難,泛化性能差,還存在擬合、局部優化和推廣性能差的缺點。相對而言,支持向量機模型是較為理想的一種隧道圍巖變形預測模型。
作為一種以結構風險最小化為原則的新算法,支持向量機(Support Vector Machine,以下簡稱SVM)具有小樣本、全局優化和泛化性能好的優點,與以經驗風險最小化為原則的人工神經網絡相比,彌補了其不足,比較適用于巖土工程,已被成功運用于邊坡和隧道的變形預測[8-11]。其中,文獻[8]研究了基于線性規劃支持向量機的隧道圍巖變形預測,其核函數不必滿足Mercer條件,從而可以靈活選取核函數;文獻[9-10]研究了基于最小二乘支持向量機的隧道圍巖變形預測模型,該模型較標準支持向量機具有計算簡便的優點。由于最小二乘支持向量機將優化問題轉化為求解線性方程,其解滿足極值條件,但不能保證是全局最優解;而標準支持向量機則是求解一個凸二次規劃,其解是唯一的且為最優解,這樣很好地克服了一般神經網絡存在的局部極值問題。因此,本文選用標準支持向量機建立隧道圍巖變形預測模型。但是,大量研究表明,SVM的預測性能很大程度上依賴于其參數的選擇,目前尚沒有統一有效的方法。文獻[11]將改進粒子群算法應用于SVM參數優化選取,提高了模型的訓練效率和預測精度。本文選擇另一種尋優性能較優且更易于實現的群體智能優化算法——蟻群算法(Ant Colony Optimization,簡稱ACO)進行SVM參數的優化搜索,結合某高速公路隧道施工監測,建立隧道圍巖變形預測的ACOSVM模型,對該模型的預測精度和泛化性能等進行闡述。
1 支持向量機基本原理
支持向量機是魏俊等[12]在1995年提出的一種基于統計學習理論的新的機器學習方法,能較好地解決小樣本、非線性、高維數和局部極小點等實際問題,問題的復雜程度不取決于特征的維數,且具有良好的推廣能力,用它建模不必知道因變量和自變量之間的關系。利用支持向量機空間中構造的最優決策函數,通過事先選擇的非線性映射將輸入樣本向量因子映射到高維特征空間,并在這個高維空間中,尋求獲得因變量和自變量之間非常復雜的非線性映射關系[13]。支持向量機結構示意如圖 1 所示。
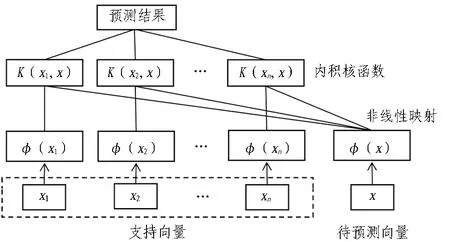
圖1 支持向量機結構示意圖Fig.1 Sketch of support vector machine
設有訓練樣本集{xi,yi},i=1,2,…,l,xi∈Rn為輸入變量,yi∈R為對應輸出值,l為訓練樣本個數。通過一個非線性映射φ將數據映射到高維特征空間,從而將非線性回歸問題轉化為高維特征空間的線性問題,即
f(x)=ωφ(xi)+b。
(1)
式中:ω為權值矢量;b為閾值。
根據結構風險最小化原則,式(1)函數回歸問題就是采用最小化結構Rstr來確定參數ω,b,即
(2)

(3)


(4)


(5)
K(xi,xj)=exp[-‖xi-xj‖2/(2σ2) ]。
(6)
從而得到決策回歸方程
(7)
大量研究表明,支持向量機的性能很大程度上取決于參數c,σ和ε的選擇[12]。本文利用蟻群算法來搜索SVM參數的最優組合,以獲得更好的預測效果。
2 基于蟻群算法的支持向量機參數優化的實現
2.1 目標函數的選擇
均方誤差MSE可以表示SVM回歸與參考模型之間的偏差,即
(8)
式中:l為樣本個數;yi為參考模型的實際值;f(xi)為通過SVM計算出的預測值。
根據式(8)可選擇均方誤差作為優化目標函數,即通過蟻群算法搜索SVM最佳參數,使訓練樣本集的均方誤差最小,即:
(9)
2.2 基于蟻群算法的SVM參數優化搜索
蟻群算法[14]是由意大利學者Dorigo等在1992年提出的一種新型群體智能優化算法。早期的蟻群算法主要是處理離散優化問題(如TSP問題),經改進后也可用于解決連續優化問題。
2.2.1概率轉移規則
設有n維待優化變量X={x1,x2,…,xn},xLowi≤xi≤xUpi,i=1,2,…,n,視為n層。將各層分量均等分成N個點,這些點可被視為TSP問題中的城市(City)。首先將m只螞蟻隨機放到x1層的N個City上,然后所有螞蟻按照式(10)所示的概率轉移規則移動到下一層xi+1的City上,如此層層轉移,直到到達第xn層:
(10)
式中:τijk為該時刻xi層的Cityj到xi+1層的Cityk(j,k=1,2,…,N)路徑上殘留的信息素濃度,又稱信息函數;ηi+1,k為螞蟻選擇該路徑的期望,又稱路徑的可見度或啟發函數;α為信息啟發因子,反映信息函數的重要程度;β為期望啟發因子,反映啟發函數的重要程度。
由式(10)可以看出,螞蟻進行路徑選擇取決于2個因素,即信息函數和啟發函數。其中,信息函數反映的是整個蟻群的累積經驗對螞蟻路徑選擇的影響程度,而啟發函數反映的是螞蟻個體經驗對選擇路徑的影響程度[14]。通常,定義初始時刻各路徑上的初始信息素濃度為一個正常數C,啟發函數的定義將在后面介紹。
2.2.2 信息素更新規則
在SVM參數搜索中,每只螞蟻走過的路徑對應的City組成一個可行解,由此計算目標函數值,然后螞蟻根據目標函數值的大小更新City(i,j)到City(i+1,k)之間路徑上的信息素。同時,為了防止螞蟻集中在某幾條較優的路徑上而陷入局部最優,需要激勵螞蟻去尋找其他更優解,為此,可使路徑上的信息素隨時間按一定速率揮發。這樣,當螞蟻完成一次搜索后,路徑上的信息素將按式(11)進行更新:
(11)
式中:ρ為信息素揮發系數,取值范圍為(0,1);當螞蟻i在本次循環中從j點移動到k點時,Δτi=Q/F(Xi),否則為0,其中Q為信息素強度(為一常數),F(Xi)為螞蟻i在本次循環中得到的目標函數值。
2.2.3 啟發函數的定義
位于xi層j點的螞蟻選擇xi+1層k點的期望(啟發函數)根據螞蟻搜索得到的目標函數值F(X)來定義:
ηi+1,k=1/F(X)。
(12)
2.2.4 終止搜索的條件
m只螞蟻經過nc次循環后得出當時的最優解X(L),然后將其各分量細化重新建立搜索空間。重復上述過程,依次得到X(2),X(3),…,當滿足停止條件max(Δi)<ε0時得到全局最優解X*,其中Δi為分量i兩等分點之間的長度,ε0為設定的精度。若算法達到預定的最大循環次數Nmax亦可終止搜索。
2.2.5 算法實現的主要流程
基于蟻群算法的支持向量機參數優化一般流程如圖2所示。
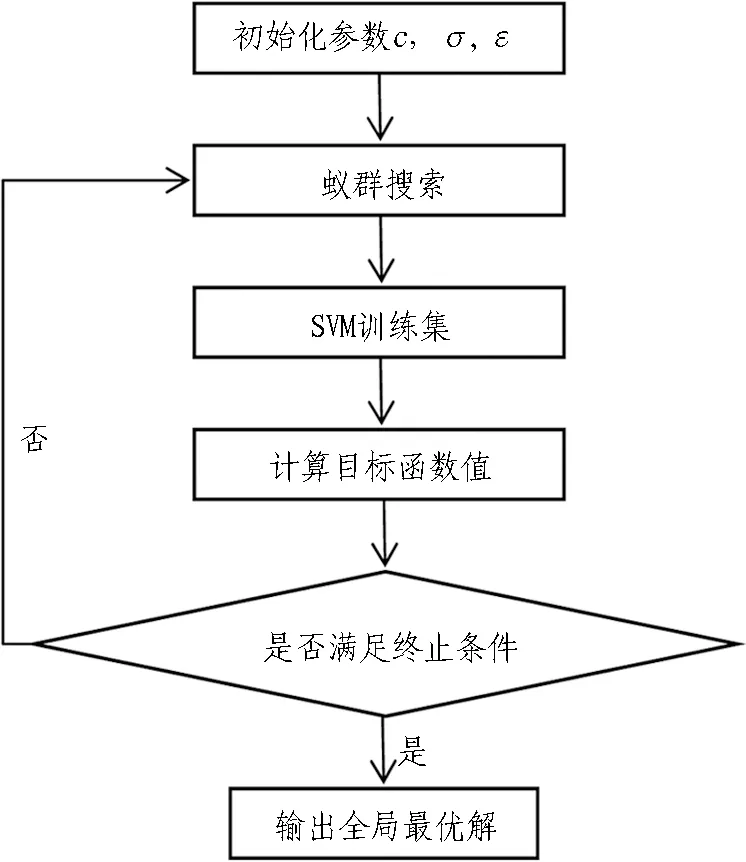
圖2 基于蟻群算法的SVM參數優化一般流程Fig.2 Process of parameter optimization of SVM based on ACO
3 預測實例分析
某高速公路隧道采用新奧法施工,為左右分離式單向行車雙車道隧道。在施工期間,對隧道圍巖進行變形監測。根據前述算法,編制基于VB和SVM工具箱的預測程序,采用滾動預測法分段對開挖過程中的圍巖收斂進行預測,并與實測結果進行對比分析。
3.1 滾動預測法
滾動預測法的基本思路為:假設要對時間序列{xi}(i=1,2,…,n)進行預測,已有p+q個樣本數據{xi}(i=1,2,…,p+q),首先用前p個樣本作為SVM網絡訓練的學習樣本,后q個樣本作為測試樣本,訓練完成后預測其后r個時間點的位移。預測時,始終保持p,q取值不變,每次預測完成后,都用得到的預測數據更新網絡訓練樣本,再按以上方式重新形成學習樣本和測試樣本進行訓練和預測,直到得到第n個時間點的預測結果。
3.2 預測結果分析
因篇幅限制,這里隨機選取隧道右線YK11+165斷面及YK11+235斷面為例進行分析。SVM 3個參數初始搜索范圍設置為c∈[0,1 000],σ∈[0,10],ε∈[0,1],各參數等分節點數N=10,細化搜索空間的循環次數p=20,重新建立搜索空間的循環次數nc=20。終止搜索的預設精度ε0=0.01,最大循環次數Nmax=500。蟻群中螞蟻總數m=30,信息素強度Q=500,信息啟發因子α=1,期望啟發因子β=2,信息素揮發系數ρ=0.4。取p=10,q=3,r=1,用該模型對其后10天的圍巖收斂進行預測。其中,對于前7天(第14—20天)的預測,終止搜索時,max(Δi)為0.007 6~0.008 9(均小于ε0),循環次數為212~436;對于后3天(第21—23天)的預測,則均以最大循環次數終止計算。為評價模型的預測性能,采用下列統計量作為預測效果的評價指標:
平均相對百分誤差
預測結果及各項預測誤差評價指標如表1和表2所示。
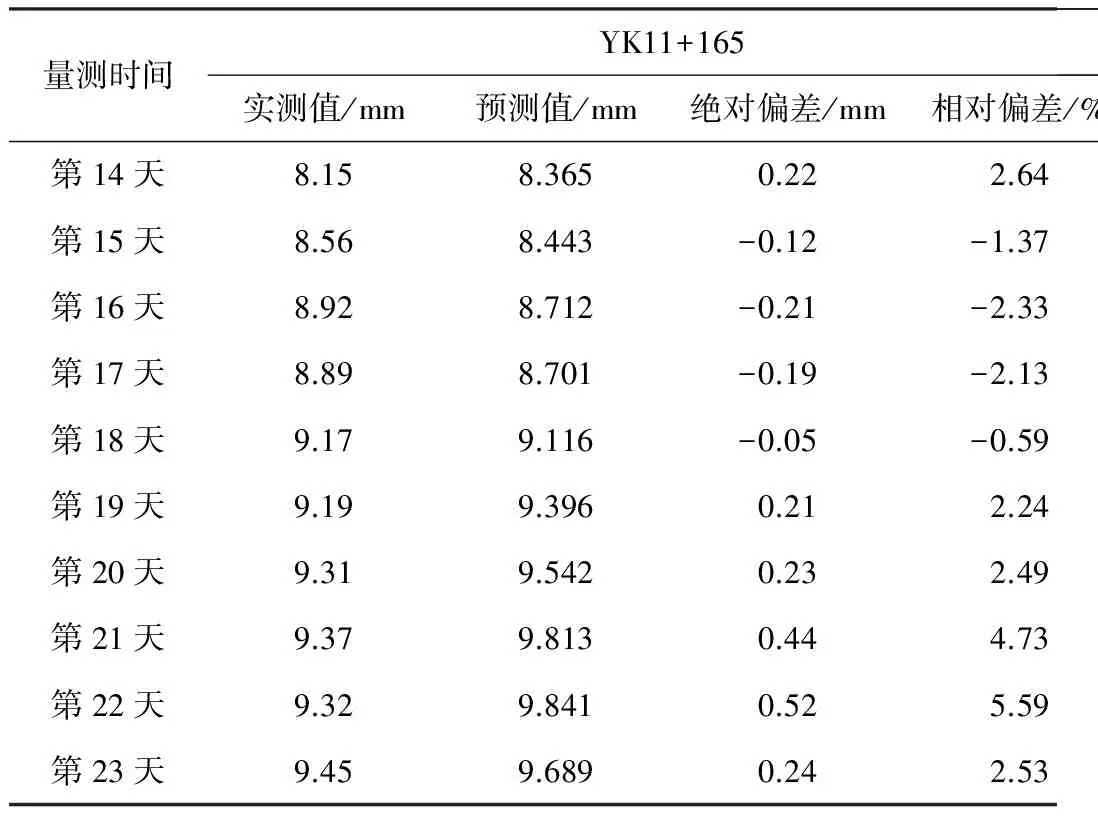
表1 隧道圍巖收斂預測結果Table 1 Prediction results of deformation of tunnel surrounding rock
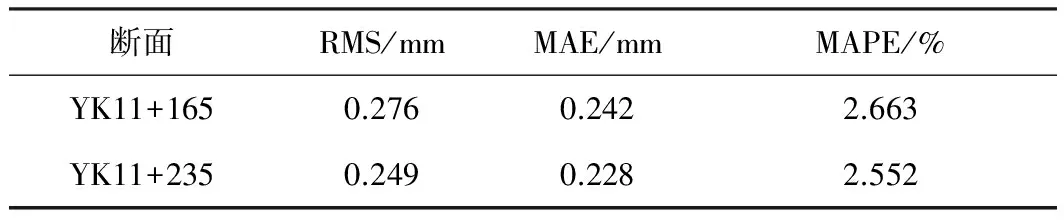
表2 預測誤差評價指標Table 2 Evaluation of prediction error
由表1和表2可知,ACOSVM模型對該隧道2個斷面的圍巖收斂都得到了較高的預測精度,由于這2個斷面為隨機選取的斷面,故這一預測結果具有一定的普遍性。YK11+165斷面預測的絕對偏差最大為0.52 mm,最小為-0.05 mm,相對偏差最大為5.59%,最小為0.59%;YK11+235斷面預測的絕對偏差最大為0.36 mm,最小為0.05 mm,相對偏差最大為-3.94%,最小為-1.04%。從各項誤差評價指標來看,該模型預測的均方根誤差RMS<0.30 mm,平均絕對誤差MAE<0.25 mm ,平均相對百分誤差MAPE<3.0%,預測精度滿足工程需要。
圖3和圖4為2個監測斷面收斂預測值與實測值的比較曲線圖。從圖中可以看出,預測曲線與實測曲線較為吻合,線形基本一致,表明預測結果能夠很好地反映實際變形趨勢。結合圖3和圖4可以發現,除第18天和第21天外,2個監測斷面的2對曲線極為相似,這表明在隧道開挖的同一時間,不同斷面的收斂變化趨勢基本一致。圖中第15—18天實測值均略大于預測值,這在一定程度上反映了隧道圍巖的實際收斂變形超出了其內在的變形規律,雖然超出量較小,但也應采取一定的措施進行調整;從第19—23天,實測值均略小于預測值,表明經過一定調整,隧道圍巖變形已被控制在其符合變形規律的安全范圍之內。由此可見,該模型預測精度高,預測結果能夠較為準確地反映隧道近期的變形趨勢,從而判定現場施工的支護形式及參數是否合理,以指導施工和優化施工參數,并能及時發現和預報險情,避免事故的發生。
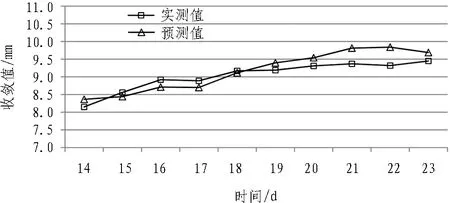
圖3 YK11+165斷面收斂預測值與實測值比較曲線Fig.3 Curves of predicted convergence and measured convergence at YK11+165
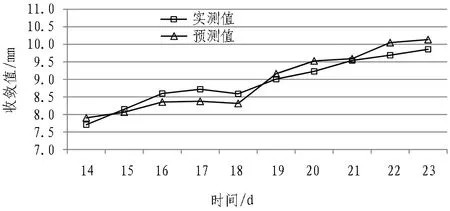
圖4 YK11+235斷面收斂預測值與實測值比較曲線Fig.4 Curves of predicted convergence and measured convergence at YK11+235
4 結論與討論
1)蟻群算法可以較好地解決支持向量機參數優化問題。利用蟻群算法優選支持向量機參數的ACOSVM預測模型原理簡單,編程易于實現,且預測精度高,可以滿足隧道施工圍巖變形預測的需求,能有效指導施工。
2)用蟻群算法優選支持向量機參數時,算法的收斂速度和全局搜索能力與蟻群算法的參數m,Q,α,β及ρ的取值有較大的關系,目前尚無快速、有效的方法,只能根據相關經驗通過多次試算確定,這降低了算法的效率,也在一定程度上阻礙了算法的推廣,這一問題還有待于進一步研究。
[1]王衛東,何暉.回歸分析在隧道拱頂沉降監測中的應用[J].科技信息,2011(7): 271-272.(WANG Weidong,HE Hui.Application of regression analysis in the tunnel crown settlement monitoring [J].Science & Technology Information,2011(7): 271-272.(in Chinese))
[2]劉開云,方昱,劉保國,等.隧道圍巖變形預測的進化高斯過程回歸模型[J].鐵道學報,2011,33(12): 101-106.(LIU Kaiyun,FANG Yu,LIU Baoguo,et al.Intelligent deformation prediction model of tunnel surrounding rock based on genetic-Gaussian process regression coupling algorithm [J].Journal of the China Railway Society,2011,33(12): 101-106.(in Chinese))
[3]胡亮.基于灰色理論的高速公路隧道圍巖變形預測方法及應用[J].交通標準化,2013(9): 103-105.(HU Liang.Forecasting methods and applications of surrounding rock deformation in expressway tunnel based on gray theory [J].Transportation Standardization,2013(9): 103-105.(in Chinese))
[4]柯尉,蔣斌松.改進MGM(1,N) 模型在賽果公路隧道變形預測中的應用[J].公路交通科技: 應用技術版,2011(9): 158-160,188.
[5]高文華,朱建群,黃自永,等.隧道圍巖變形動態預測的灰色自適應模型及其參數智能辨識[J].公路交通科技,2012,29(1): 114-120,149.(GAO Wenhua,ZHU Jianqun,HUANG Ziyong,et al.Grey self-adaptive model of dynamic prediction of surrounding rock deformation of tunnel and intelligent identification of parameters[J].Journal of Highway and Transportation Research and Development,2012,29(1): 114-120,149.(in Chinese))
[6]江濤.山區軟巖大跨度隧道變形神經網絡預測及其工程應用[D].上海:同濟大學結構工程學院,2007.
[7]國威.基于神經網絡理論的公路隧道圍巖變形預測與穩定性分析[D].重慶:重慶大學安全技術及工程學院,2009.
[8]李曉龍,魏丹,王復明.基于線性規劃支持向量機的隧道圍巖變形預測[J].中外公路,2009,29(4):157-162.(LI Xiaolong,WEI Dan,WANG Fuming.Tunnel surrounding rock deformation predictionbased on linear programming support vector machine[J].Journal of China & Foreign Highway,2009,29(4):157-162.(in Chinese))
[9]李曉龍,王復明,李曉楠.隧道圍巖變形預測的最小二乘支持向量機方法[J].鐵道建筑,2009(2):24-27.(LI Xiaolong,WANG Fuming,LI Xiaonan.Prediction of deformation in surrounding rock of tunnel by least squares support vector machines method [J].Railway Engineering,2009(2):24-27.(in Chinese))
[10]李曉龍,王復明,蔡迎春.最小二乘支持向量機在隧道圍巖變形預測中的應用[J].公路交通科技,2009,26(7):80-84,108.(LI Xiaolong,WANG Fuming,CAI Yingchun.Predicting deformations of tunnel surrounding rock by using least squares support vector machine[J].Journal of Highway and Transportation Research and Development,2009,26(7):80-84,108.(in Chinese))
[11]李曉龍.基于支持向量機的巖體力學參數反演及工程應用[D].鄭州:鄭州大學水土結構工程學院,2009:54-61.
[12]魏俊,周步祥,林楠,等.基于蟻群支持向量機的短期負荷預測[J].電力系統保護與控制,2009,37(4):36-40.(WEI Jun,ZHOU Buxiang,LIN Lan,et al.Short-term load forecasting based on MG-CACO and SVM method [J].Power System Protectionand Control,2009,37(4): 36-40.(in Chinese))
[13]譚鵬,曹平.基于灰色關聯支持向量機的地表沉降預測[J].中南大學學報:自然科學版,2012,43(2): 632-637.(TAN Peng,CAO Ping.Predicting surface settlement of tunnel using grey relational-support vector machine[J].Journal of Central South University Science and Technology,2012,43(2): 632-637.(in Chinese))
[14]陳喜鳳,劉嶺,黃騰.基于蟻群算法的地鐵隧道沉降預測研究[J].隧道建設,2013,33(6):462-468.(CHEN Xifeng,LIU Ling,HUANG Teng.Study on settlement prediction of Metro tunnels based on Ant Colony Algorithm [J].Tunnel Construction,2013,33(6):462-468.(in Chinese))
我國最大規模的城市地下交通工程竣工
2013年12月25日,我國最大規模的城市地下交通樞紐工程——南京青奧軸線地下交通工程主體全面完工。今后,青奧軸線主隧道將直通南京第6個公路過江通道,能有效改善南京市的交通狀況。
南京青奧軸線地下交通工程位于長江三橋和長江隧道之間,南接繞城公路油坊橋立交,北接未來的梅子洲過江通道,并與揚子江大道、江山大街、燕山路、江東南路、廬山路和青奧會議中心、青奧運動員村等交接。整個工程主要由青奧軸線主線隧道、濱江大道下穿隧道和青奧軸線廣場地下空間3部分組成,呈“T”字形結構布局,共設置了11條匝道,各種地下隧道、匝道立交和地下空間疊落交錯,組成了一個錯綜復雜的地下3層互通立交結構。
工程總開挖土方176萬m3,澆筑混凝土53萬m3,用鋼筋11萬t,混凝土澆筑深度達到了54.5 m,地下立交主體部分投資21.75億元,是目前我國最大規模的城市地下交通樞紐工程。
南京青奧軸線項目不僅建設規模大,而且設計極為新穎和復雜,施工難度很大。建設者采用國內明挖基坑施工的新技術、新工藝和科學的降水設計、監控量測手段,有效地控制了沉降和涌水,最大限度地防范施工風險。整個工程算下來,一共抽出了6 000萬m3的涌水,相當于抽走了14個玄武湖。因為地質復雜、開挖面積大、結構體系復雜、工法轉換頻繁,建設者們不得不將基坑分作多個施工區域,分部有序進行開挖,同時還要大規模開展降水排水工作。開挖期間的涌水量最高達25萬m3/d。
南京青奧軸線3層立交深基坑所在位置距離長江岸邊最近的地方僅有90 m,為了對基坑開挖進行最穩固圍護,他們將地下連續墻打到了基巖以下2 m的深度,總深度達54.5 m;同時,采用自凝灰漿新型墻體進行分區隔水,目前這種工藝只在三峽大壩等少數工程中使用過。
青奧軸線地下交通工程經過2 000多名建設者和技術人員19個月的鏖戰,提前完成了這一超大體量和高難度的地下樞紐工程。青奧軸線地下交通工程主體完工后,即將全面轉入機電安裝和地面綠化等后期工作。2014年6月,南京青奧軸線將整體交付青奧會使用。
(摘自 觀察者 http://www.guancha.cn/Project/2014_01_07_197903_s.shtml 2014-01-13)
武漢地鐵4號線在國內首創“連續換乘”模式
武漢地鐵4號線一期于2013年12月28日開通運營。據總體設計方中鐵第四勘察設計院負責人介紹,該工程最大的設計亮點是4號線和2號線在洪山廣場、中南路2個車站交會,首創了國內同站臺連續換乘模式。
中鐵第四勘察設計院主管武漢地鐵設計的副總工程師熊朝輝介紹,同站臺連續換乘模式,即在中南路站采用雙島平行連續換乘,車站為地下2層雙島4線,2號線在中間,4號線在兩側;洪山廣場站為地下2,3層同站臺換乘,2號線上下重疊布置于車站西側,4號線上下重疊布置于車站的東側。另外,武漢地鐵4號線還創新地采用“單柱車站”設計,即車站只有一排柱子。據了解,國內地鐵10 m以上站臺多采用雙排柱子,使用單柱的好處是站臺空間更大。
武漢地鐵4號線一期工程全長16.5 km,均為地下線,設站15座,連接武漢火車站和武昌火車站,是國內首條連接2大火車站的地鐵,也是武漢最早開工的地鐵。
武漢地鐵4號線將與先期開通的1號線和2號線構成大武漢“工”字形的軌道交通網絡,實現高鐵、城鐵、地鐵“三網”間的快速無縫換乘。
(摘自 中國政府網 http://www.cces.net.cn/guild/sites/tmxh/read_zhxw_39290.html 2013-12-26)
HighwayTunnelSurroundingRockDeformationPredictionModelBasedonSupportVectorMachineOptimizedbyAntColonyOptimizationandItsApplication
QIU Zhigang
(TransportationPlanning,SurveyandDesignInstituteofXinjiangUygurAutonomousRegion,Urumqi830006,Xinjiang,China)
Support vector machine (SVM) based on structural risk minimization is used to predict the deformation of tunnel surrounding rocks,so as to understand the deformation trend of the surrounding rocks and to take measures to control the deformation.In the paper,the principle of support vector machine is described,the parameter optimization method based on ant colony optimization (ACO) is studied,and the ACOSVM model is established.The deformation prediction model has been applied in the construction of a highway tunnel,which shows that the model has high precision and can provide effective guidance for the tunnel construction.The paper can provide reference for similar projects in the future.
tunnel; surrounding rock; deformation; prediction; support vector machine; ant colony optimization; parameter optimization
2013-09-25;
2013-11-10
邱志剛(1982—),男,湖北麻城人,2004年畢業于新疆大學,測繪工程專業,本科,工程師,主要從事公路工程測繪工作。
10.3973/j.issn.1672-741X.2014.01.003
U 45
A
1672-741X(2014)01-0013-06
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
中華詩詞(2020年1期)2020-09-21 09:24:52
數學物理學報(2020年2期)2020-06-02 11:29:24
中華建設(2019年12期)2019-12-31 06:47:58
小學生作文(中高年級適用)(2018年5期)2018-06-11 01:22:56
江西建材(2018年4期)2018-04-10 12:37:22
中學生數理化·七年級數學人教版(2017年11期)2017-04-23 07:18:00
數學大王·中高年級(2016年12期)2016-12-26 21:37:36
光學精密工程(2016年6期)2016-11-07 09:07:19
