基于預測模型的模糊參數自尋優S面控制器
2014-08-26 06:31:44何斌萬磊姜大鵬張國成
哈爾濱工程大學學報 2014年3期
關鍵詞:模型
何斌,萬磊,姜大鵬,張國成
(1.哈爾濱工程大學 船舶工程學院,黑龍江哈爾濱150001;2.哈爾濱工程大學 水下機器人技術重點實驗室,黑龍江 哈爾濱150001)
潛水器是一個多變量、強耦合且高度非線性的動力學系統,加之環境的不確定性、時變性以及任務的復雜性,使得在潛水器運動控制研究中依賴于精確數學模型的傳統控制方法顯得有些不足,目前該領域的專家主要將精力集中在現代控制及智能控制方法上[1]。S面控制算法是劉學敏等提出的一種結合了PID控制和模糊控制的混合控制算法,在多個潛水器的海試中取得了良好的控制效果[2-4]。
潛水器自身載荷以及外界環境的時變性要求S面控制器參數能夠實時調整,人工調參不僅占用大量的人工時間,而且對環境變化不夠靈敏。研究人員將粒子群優化算法[5]、模糊控制[6]、專家控制[7]、預測控制[8]等引入到S面控制器參數調整中,做了大量研究工作。基于模糊規則的參數調整方法具有參數少、易實現的優點;基于預測模型的參數調整方法能夠解決潛水器狀態信息滯后的缺點,但其反饋優化環節普遍具有在線計算量大的缺點[9]。本文結合預測控制的思想,為基于模糊規則的參數自尋優S面控制方法提供超前的狀態信息,同時也避開了基于預測模型的參數自尋優方法中在線計算量大的不足。
1 潛水器預測模型的建立
1.1 基于Elman神經網絡的模型辨識
1.1.1 系統描述
針對潛水器動力學系統的高度非線性、強耦合性,本文采用NARMA模型來描述潛水器的動力學特征。NARMA模型是一種用關于帶時滯輸入、輸出的非線性函數來表示系統動態特征的模型[10]。潛水器的NARMA預測模型可以表示為

式中:x(t)= [y(t-1),…,y(t-n),u(t-d),…,u(t-d-m)]T;y=[ξ,η,ζ,φ,θ,ψ,u,v,w,p,q,r]T為潛水器的狀態信息;u=[Xτ]T為控制器解算得到的6自由度所需的推力(矩);FENN(˙)為非線性函數,采用Elman神經網絡辨識得到。
1.1.2 Elman 神經網絡及應用注意
Elman神經網絡屬于局部回歸網絡,其內部反饋機制體現其能夠映射動態過程的能力[11]。本文采用Elman神經網絡對潛水器的NARMA模型進行辨識以提高預測模型適應時變環境的能力。Elman神經網絡結構如圖1所示,相對于常規3層前饋網絡,其增加的狀態層用來儲存隱含層上一時刻的輸出值,狀態層單元作為一步延時算子起到記憶過去狀態的作用。Elman神經網絡的狀態空間表達式[11]為
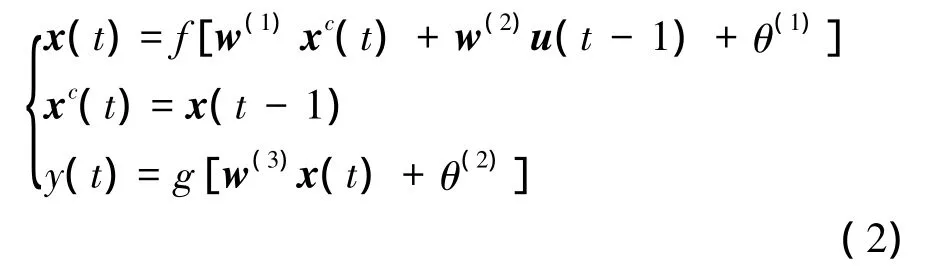
式中:y(t)為系統t時刻的輸出,u(t)為系統t時刻的輸入,xc(t)為狀態層t時刻的輸入,x(t)為隱含層t時刻的輸入,w(1)為狀態層至隱含層的權值矩陣,w(2)為輸入層至隱含層的權值矩陣,w(3)為隱含層至輸出層的權值矩陣,θ(1)、θ(2)分別為隱含層和輸出層神經元的閾值矩陣,f(˙)與g(˙)為隱藏層和輸出層神經元的激活函數。
Elman神經網絡的學習算法可參考文獻[11]。下面給出采用BP算法得到的權值矩陣w(1)、w(2)和w(3)的修正量:
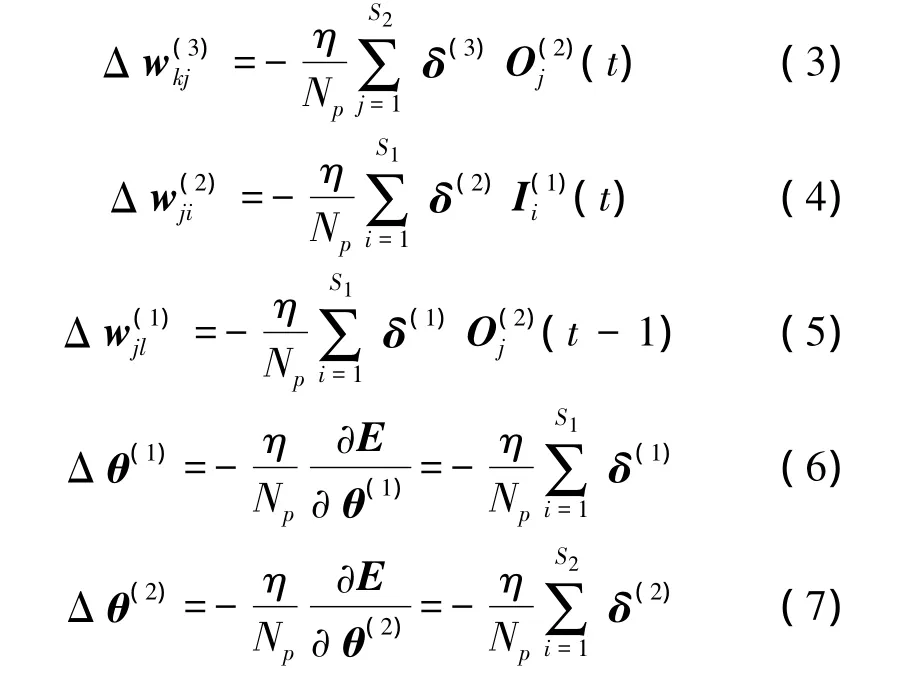
式中:i、j、k、l分別為輸入層、隱藏層、輸出層和狀態層的神經元序列,η為學習率,NP為學習樣本容量,S1、S2、S3為輸入層、隱含層及輸出層的神經元節點數分別為輸入層、隱藏層、輸出層及狀態層的輸入分別為輸入層、隱藏層、輸出層及狀態層的輸出為狀態層到隱含層的反饋誤差信號,為輸入層到隱含層的反饋誤差信號為隱含層到輸出層的反饋誤差信號。
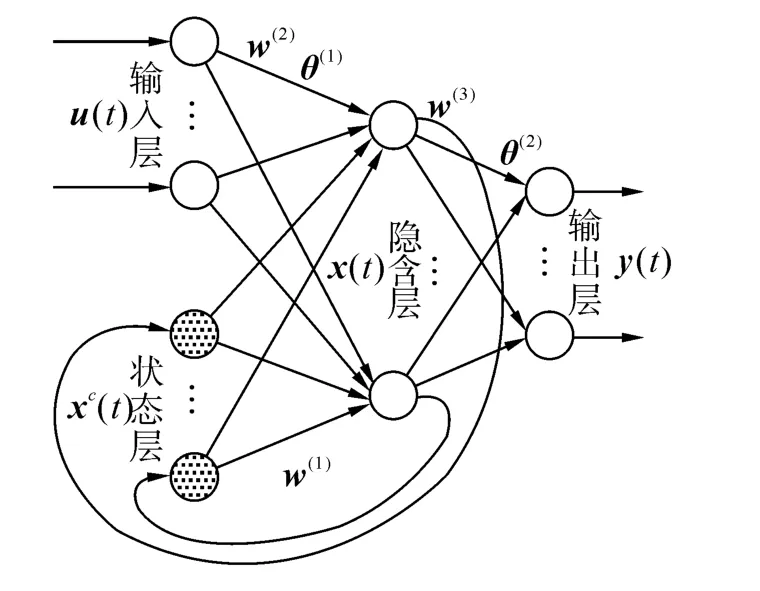
圖1 Elman神經網絡結構Fig.1 Structure of Elman neural network
應用Elman神經網絡時以下2點值得注意:
1)權值矩陣初值的設置對網絡學習結果的最佳程度會有影響,因此將權值矩陣的初值w(1)(0)、w(2)(0)和w(3)(0)設置為在[0,1]區間均勻分布的隨機數。
2)與BP網絡類似,Elman網絡的學習率太大會導致收斂振蕩,太小會導致收斂過慢,改進辦法是在權值修正表達式里加入慣性調整項,將權值與閾值的調整量統一用ΔM表示,改進后的“慣性”調整算法為

式中:β為慣性系數,ΔM(t)表示t時刻的權值或閾值的調整量,ηN(t+1)為t+1時刻由式(3)~(7)得到的權值或閾值修正量。
β的值越大,則每一次的系數調整量受前一次的調整量的影響越大,若t+1時刻權值調整的符號與t時刻一致,則表示調整方向的正確性,將2次調整量相加以加快調整速度;反之則相減,以減緩調整速度。實驗證明,η和β選取的都較大或較小時,可以達到相似的收斂結果,只是前者的學習速度要相對快得多。
1.2 基于在線辨識的改進
如果只采用離線辨識好的模型進行預測,當環境(內在及外界)變化時預測結果將不再可信,辨識網絡需根據系統實時的輸入輸出信息進行在線學習,達到誤差限后更新權值,以建立新的預測模型。
網絡訓練耗時過長是在線辨識過程中最重要的問題之一,隨著時間的推移學習樣本的容量會越來越大,網絡訓練所需的時間也會越來越長,甚至在一個控制節拍內不能完成學習。為了解決以上問題,本文從樣本容量和預測模型結構進行了考慮。
1.2.1 滾動樣本法的應用
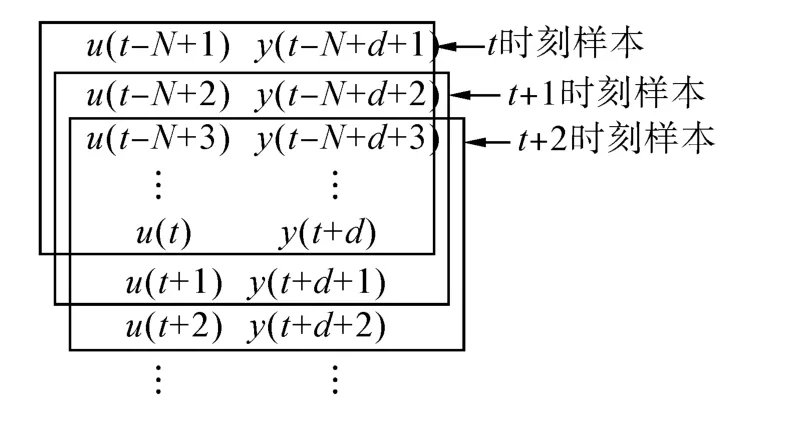
圖2 滾動樣本法Fig.2 Schematic diagram of rolling samples method
N值的設定要以實際系統的計算能力為依據,在處理器允許的情況下較大的N值能夠加速網絡的收斂。為了對N值進行初步估計,本文首先在水面監控工作機上利用MATLAB進行了離線辨識實驗。
實驗所需樣本選自某潛水器定艏向控制水池實驗數據,待辨識NARMA模型的輸入輸出階數分別為m=1、n=3,系統時滯d=1,即{y(t-1),y(t-2),y(t-3),u(t),u(t-1);y(t)}為一組樣本。Elman網絡有一層隱含層,輸入輸出層節點數分別為5和1,隱含層節點數為15,隱含層的傳輸函數取tansigS函數,輸出層的傳輸函數取purelin線性函數,訓練步長設為200。離線辨識結果如圖3所示,校驗樣本容量為150。當訓練樣本容量為300時網絡達到誤差限的迭代步數在100步左右(多次實驗),時間消耗在0.1 s之內。因此可選擇300作為N的初始值,實際實驗時須進行逐步修正。
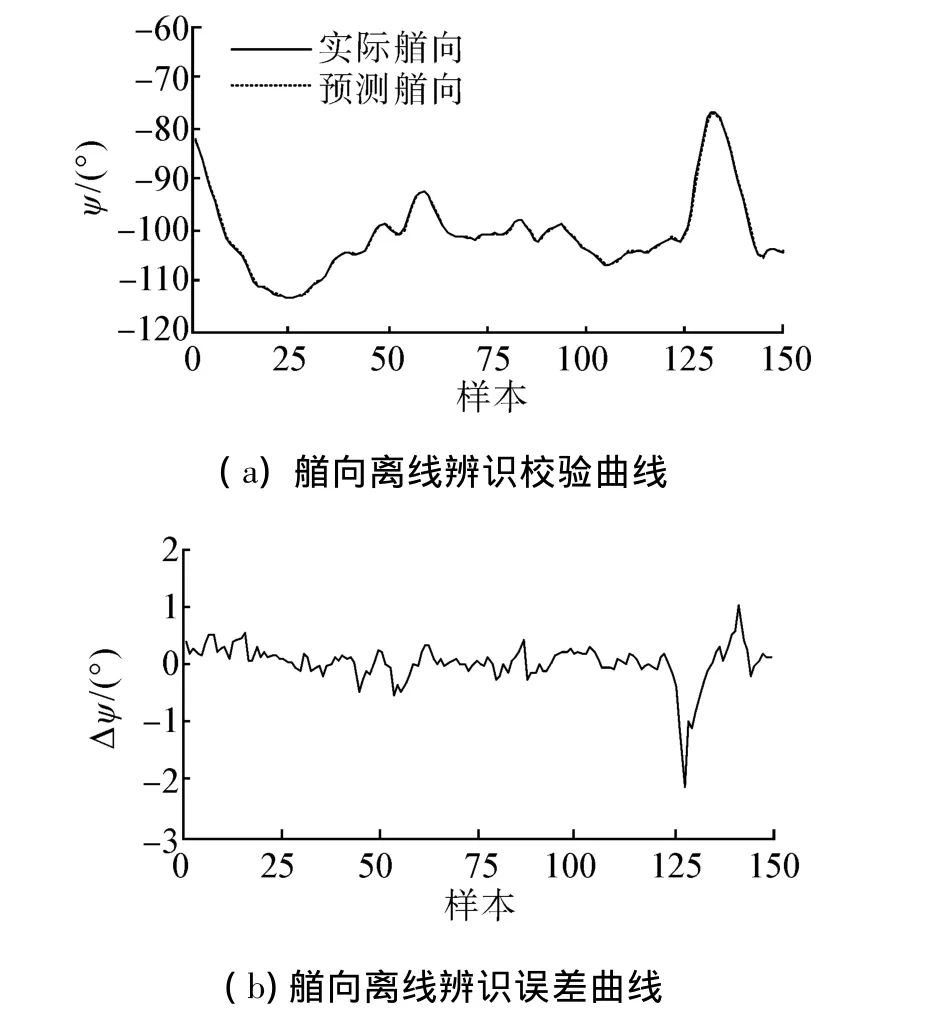
圖3 艏向離線辨識結果Fig.3 Results of heading off-line identification
1.2.2 預測模型結構的改進
網絡訓練一般采用設置學習誤差限和限定學習步長相結合的方式來結束一個節拍內的學習。而通過設置學習步長強行停止訓練會導致建立的預測模型不準確;某些情況下即使采用滾動樣本法來減少網絡學習時間,在線辨識網絡仍然不能在一個控制節拍內收斂到誤差限,從而不得不在限制步數到來時停止學習。鑒于此,本文采用并行神經網絡的思想[12],將在線辨識網絡并列加入到預測網絡中,以改善預測模型的在線辨識性能,其結構如圖4所示。圖中,u(t)為控制器輸出的控制指令;yu(t+d)為潛水器的實際輸出;ym(t+d|t)、ym'(t+d|t)為模型預測輸出;em'(t+d|t)為在線辨識網絡的預測誤差;z-1為單位延遲算子。預測網絡使用上一次學習得到的網絡權值進行預測輸出,在線辨識網絡則以學習誤差限為停止學習的主要依據,進行多個節拍的學習,直到滿足誤差限要求,即em'(t+d|t)<emax,然后更新預測網絡的權值矩陣,以此改善模型的在時變環境下的預測能力。
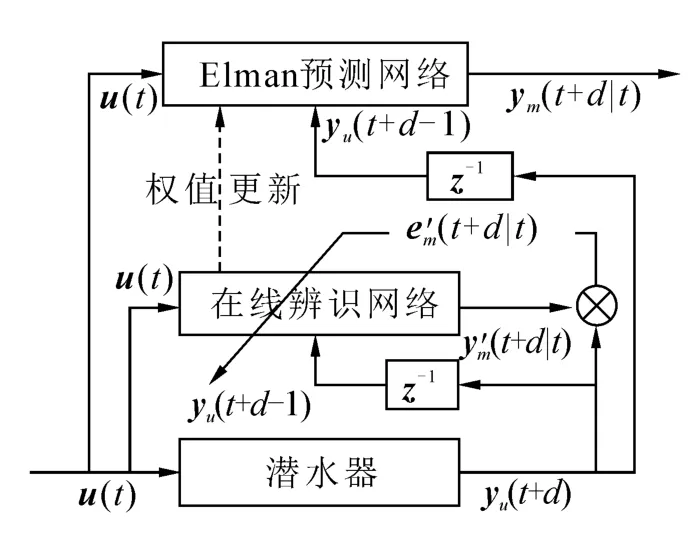
圖4 改進的辨識模型結構Fig.4 Improved identification structure
2 基于模糊規則的參數自尋優方法
S面控制算法表達式如下:

式中,被控量的偏差e與偏差變化率e·為控制器的輸入,u為控制器的輸出,k1、k2分別表示某個自由度被控量的偏差和偏差變化率對應的參數,Δu表示通過自適應調整得到的某段時間上的固定干擾力,風浪流、重力和浮力的變化以及其他一些未知因素可視為一段時間里的固定干擾力。以上變量均經過歸一化處理。
對于潛水器各自由度之間的耦合,實際處理時為除橫搖之外的5個自由度分別設計1個S面控制器,實現對潛水器運動的有效控制。從S面控制算法表達式可以看出S面控制在形式上和PD控制很相似,S面控制包含2個控制參數k1和k2,與PD控制的2個參數相對應,并且含義相同,只不過后者是線性的,前者是非線性的。當然,采用非線性函數來擬合非線性系統比采用線性函數更好一些[14]。通過改變k1和k2的大小可以調整偏差和偏差變化率在控制輸出中所占的比重,從而調節控制的超調和收斂速度以滿足作業的要求。
深栽造林用到的烏柳枝干春季截取母樹上生長健壯的1~3年生萌生粗壯枝,插干大頭直徑在2~4cm。選擇無機械損傷,無抽條干縮,無畸形,無彎曲和無病蟲害的枝條。剪除枝條全部的抽條,剪取枝條中部作插干,插干長約110~120cm。
經過大量的潛水器仿真和外場實驗,研究人員[2,4,6]已經針對各自由度 S 面控制器的參數實時調整總結出一些經驗和知識。應用模糊推理可以方便地將研究人員的經驗與思考歸納為系統化的規則并實現對參數的調節。S面控制器基于模糊規則的參數自尋優方法可參見文獻[13],下面給出本文的處理過程。
1)基本論域及尺度變換:模糊推理的輸入量為各自由度的位姿偏差及偏差變化率,輸出量為各自由度的S面控制器參數。變量基本論域需根據具體實驗環境下輸入量、輸出量的變動范圍進行初步估計,在具體調試和實驗過程中須進行不斷修正;模糊推理尺度變換所要求的論域選擇[-1,1]。
2)模糊空間分割及隸屬度函數的選擇:將模糊推理輸入空間分為7檔,將輸出空間分為5檔,隸屬度函數選用對稱、均勻分布、全交疊的三角形隸屬度函數。
3)模糊化與清晰化:模糊推理的輸入量采用單點模糊集合表示

式中:A為輸入空間對應的模糊集合,μA(e)為模糊集合A的隸屬度函數。對k1、k2的清晰化處理采用加權平均法:
式中:μC'(ki)為ki對應模糊集合C'的隸屬度函數,為得到的清晰變量。
4)模糊規則:由于輸出量k1、k2相對獨立,因此系統為2個輸入(e和),單輸出(k1或者k2)系統,以k1為例,參數調整規則見表1。

表1 參數k1模糊調整規則Table 1 Fuzzy adjusting rules of k1
5)模糊推理:本文采用廣義肯定式推理,計算公式如下

式中:Ai、Bi、Ci分別為輸入空間、輸出空間對應的模糊集合;μAi(·)、μBi(·)、μCi(·)分別為模糊集合Ai、Bi、Ci的隸屬度函數;μAi(e)∧μBi()可以理解為第i條規則的加權因子。
3 基于預測模型的模糊參數自尋優S面控制器
下面將前文建立的預測模型應用到基于模糊規則的參數自尋優S面控制器中。基于預測模型的模糊S面控制器結構如圖5所示。
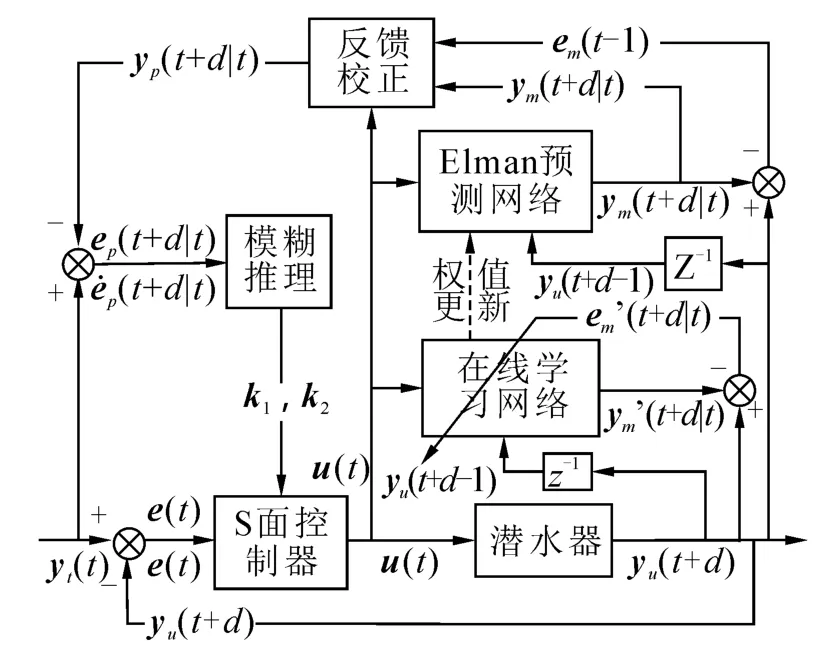
圖5 基于預測模型的模糊S面控制器結構Fig.5 Fuzzy S surface controller based on prediction model
基于預測模型的模糊S面控制器包括4個模塊:基本S面控制器模塊、預測模型模塊、反饋校正模塊和基于模糊規則的參數調整模塊。基本S面控制器模塊可參考文獻[14]。
為了避免由于模型失配引起控制失效,需要時刻檢測系統實際輸出與預測模型輸出的誤差,對預測輸出進行實時校正,使參數在線自尋優建立在誤差反饋校正的基礎上,以提高了系統的穩定性。反饋校正按下式計算:

式中:y(t+d)為t時刻系統的實際輸出,ym(t+d|t)為t時刻預測模型的預測輸出。
基于預測模型的模糊參數自尋優方法可用下式表示:
式中:k1(t)、k2(t)為模糊推理得到的t時刻各自由度的控制器優化參數;FISm為基于Mamdani蘊含運算的模糊推理系統;FENN為非線性函數,由Elman神經網絡辨識;e(t+d|t)、(t+d|t)為系統經過模型預測、反饋校正后,與期望狀態比較得到的t時刻各自由度的偏差和偏差變化率;yt(t)為t時刻實驗載體的期望狀態;yp(t+d|t)為t時刻由預測模型經反饋校正后各自由度的預測輸出;ym(t+d|t)為t時刻由預測模型得到的各自由度的預測輸出;y(t+d-i|t)為t-i時刻的系統輸出,其取值按下式計算:
文獻[15]從位置控制和速度控制2個方面出發,分析了S面控制方法在潛水器運動控制中的穩定性問題。該文中將縱向S面控制表達式進行線性化處理,得到縱向PD控制器。通過選取能量函數作為李雅普洛夫函數,證明了縱向PD控制器的穩定性。然后根據T-無源理論證明了非線性的S面控制方法是李雅普洛夫穩定的,并得到了S面控制器的參數設計準則,即k1>0,k2>0。
本文的工作是在預測模型基礎上通過模糊推理實現S面控制器參數的自尋優。離線辨識實驗檢驗了Elman神經網絡的在一定訓練樣本數量下的收斂性,并由此得到了在收斂時間和系統性能之間平衡的滾動樣本數量;并行神經網絡的辨識結構保證了預測值的置信度(在線學習網絡收斂后再將網絡權值傳遞給預測網絡),因此,只要保證模糊推理規則庫中S面控制器參數均大于零,就能保證控制系統的穩定。
4 仿真實驗及分析
為了驗證改進后的參數自尋優S面控制器的性能,將普通S面控制器、基于模糊規則的參數自尋優S面控制器和基于預測模型的模糊參數自尋優S面控制器與潛水器運動仿真平臺聯機進行仿真實驗,潛水器運動仿真平臺的建立可參考文獻[16],下面將縱向運動控制和艏向運動控制的仿真實驗結果進行比較分析。
圖6為縱向運動控制實驗結果曲線。初始縱向位置為0 m,目標縱向位置為3 m,S面控制器的初始參數設置為k1=2,k2=5。
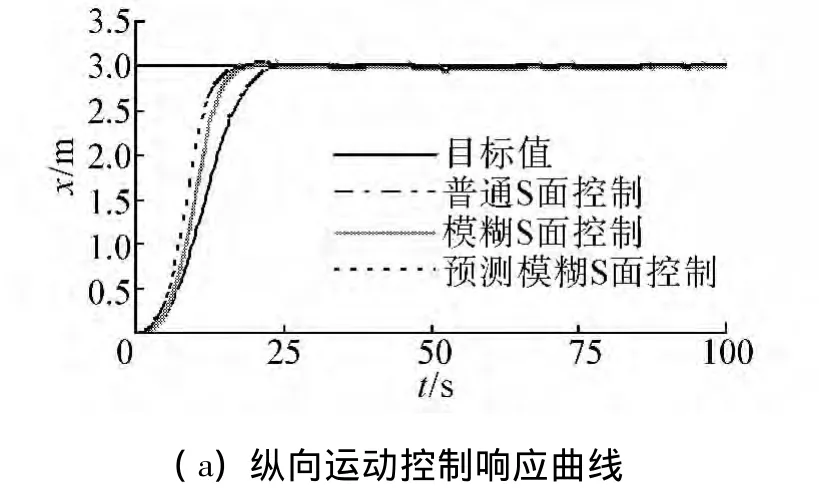
圖7為艏向運動控制實驗結果曲線。初始艏向角為0°,目標艏向角為30°,S面控制器的初始參數設置為k1=1,k2=3。
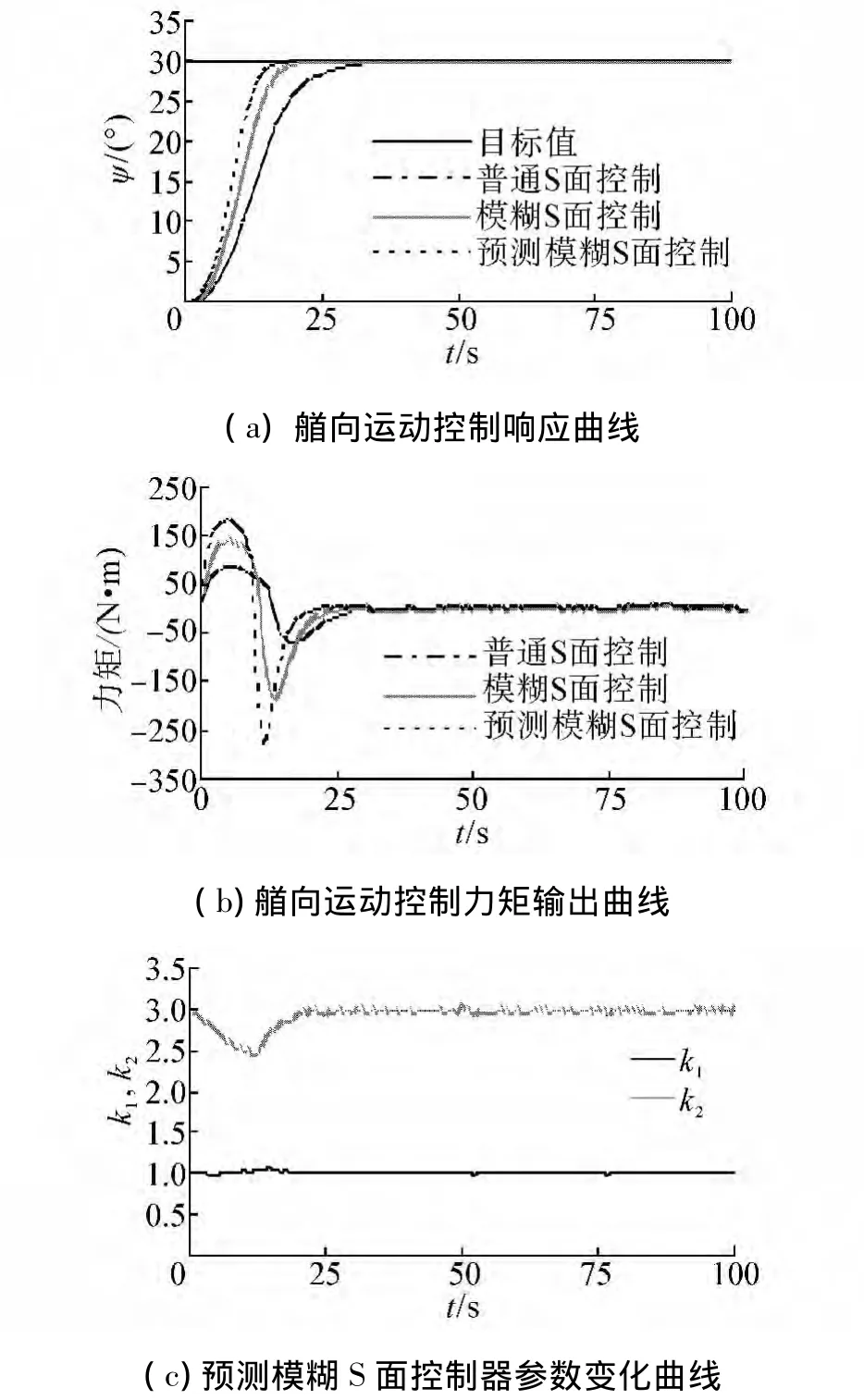
圖7 艏向運動控制實驗結果Fig.7 Results of heading control
由圖6(a)、7(a),縱向、艏向運動在基于預測模型的模糊參數自尋優S面控制器作用下達到目標值的響應時間為18 s和17 s,相應在模糊S面控制器作用下的響應時間為21 s和22 s,在普通S面控制器作用下的響應時間為25 s和33 s。可見基于預測模型的模糊參數自尋優S面控制器在控制響應速度方面優于其他2種控制器;
由圖6(b)、7(b),應用基于預測模型的模糊參數自尋優S面控制器時,系統的推力、力矩輸出較其他2種控制器更為靈敏,推力輸出的負值部分體現其對控制超調的提前制動能力,這是快速趨近目標的意志體現。圖6(b)中顯示推力輸出出現了震蕩,原因是運動仿真程序中對速度傳感器的模擬加入了高斯噪聲,以模擬真實的水聲環境,而縱向位置控制輸出需要采集速度傳感器數據作為偏差變化率,由此計算得到的推力就出現了震蕩的現象;而圖7(b)中轉艏力矩沒有出現類似的震蕩現象,因為姿態傳感器的輸出較依賴于水聲環境的速度傳感器要更加平穩。
圖6(c)、7(c)為基于預測模型的模糊參數自尋優S面控制器和模糊參數自尋優S面控制器的參數自尋優過程,在偏差縮小的控制響應過程中,k1先增大后減小,k2先減小后增大,體現了模糊規則的思想。
在超調量和穩態誤差方面3種控制器沒有明顯差異,這與仿真平臺的逼真度存在一定的關系。
5 結論
本文針對S面控制器的參數調整問題,結合模糊控制與預測控制的思想,探討了基于預測模型的模糊參數自尋優方法,由仿真實驗結果可得到以下結論:
1)該方法所選的NARMA模型能夠反映潛水器的動態特征,將其作為潛水器的預測模型是可行的;
2)采用并行Elman神經網絡對本文建立的NARMA模型進行模型辨識能夠滿足仿真實驗要求;
3)將建立的預測模型加入基于模糊規則的參數自尋優S面控制器中能夠提升控制器的控制響應速度,可為潛水器執行時限任務時爭取更多的有效時間,具有重要的實際意義。
不足之處在于改進的S面控制器的穩定性沒有在復雜海洋環境下進行測試,這是以后值得研究的問題。
[1]張鐵棟.潛水器設計原理[M].哈爾濱:哈爾濱工程大學出版社,2011:162-182.
[2]LI Ye,PANG Yongjie,WAN Lei,et al.A fuzzy motion control of AUV based on apery intelligence[C]//Proceedings of 2009 Chinese Control and Decision Conference.Guilin,China,2009:1316-1321.
[3]WANG Jianguo,WU Gongxing,WAN Lei,et al.Motion control of underwater robot based on an improved controller[C]//Proceedings of 2009 IEEE International Conference on Intelligent Computing and Intelligent Systems.Shanghai,China,2009:694-699.
[4]SUN Yushan,WAN Lei,LI Yueming,et al.S plane control based on parameters optimization with simulated annealing for underwater vehicle[C]//Proceedings of 2011 International Conference on Electronic and Mechanical Engineering and Information Technology.Harbin,China,2011:552-556.
[5]郭冰潔,徐玉如,李岳明.水下機器人S面控制器的改進粒子群優化[J].哈爾濱工程大學學報,2008,29(12):1277-1282.GUO Bingjie,XU Yuru,LI Yueming.S surface controller for underwater vehicles using particle swarm optimization[J].Journal of Harbin Engineering University,2008,29(12):1277-1282.
[6]呂翀.自主式水下機器人智能控制[D].哈爾濱:哈爾濱工程大學,2008:24-35.LYU Chong.Intelligent motion control of autonomous underwater vehicle[D].Harbin:Harbin Engineering University,2008:24-35.
[7]ZHANG Lei,PANG Yongjie,SU Yumin,et al.Expert S-surface control for autonomous underwater vehicles[J].Journal of Marine Science and Application,2008,7(4):236-242.
[8]WANG Fang,WAN Lei,SU Yumin,et al.AUV modeling and motion control strategy design[J].Journal of Marine Science and Application,2010,9(4):379-385.
[9]高萍.基于神經網絡的水下機器人廣義預測控制技術研究[D].哈爾濱:哈爾濱工程大學,2007:22-28.GAO Ping.Study on generalized predictive control of autonomous underwater vehicles based on neural network[D].Harbin:Harbin Engineering University,2007:22-28.
[10]羅秋濱.一類非線性系統預測控制中的建模問題[D].哈爾濱:哈爾濱工業大學,2008:19-41.LUO Qiubin.Modeling problems in nonlinear predictive control[D].Harbin:Harbin Institute of Technology,2008:19-41.
[11]郭健.基于智能算法的非線性模型研究及預測控制[D].武漢:華中科技大學,2008:69-78.GUO Jian.Study on nonlinear model and predictive control based on intelligent algorithm[D].Wuhan:Huazhong U-niversity of Science and Technology,2008:69-78.
[12]甘永.水下機器人運動控制系統體系結構的研究[D].哈爾濱:哈爾濱工程大學,2007:75-86.GAN Yong.Research on motion control system architecture of underwater vehicle[D].Harbin:Harbin Engineering University,2007:75-86.
[13]趙云峰,宋立維,吳志勇.基于模糊算法的Sigmoid函數的AUV控制[J].微計算機信息,2009,25(8):267-269.ZHAO Yunfeng,SONG Liwei,WU Zhiyong.AUV control using sigmoid function with fuzzy algorithm[J].Microcomputer Information,2009,25(8):267-269.
[14]劉學敏,徐玉如.水下機器人運動的S面控制方法[J].海洋工程,2001,19(3):81-84.LIU Xuemin,XU Yuru.S control of automatic underwater vehicles[J].The Ocean Engineering,2001,19(3):81-84.
[15]李岳明.多功能自主式水下機器人運動控制研究[D].哈爾濱:哈爾濱工程大學,2013:25-31.LI Yueming.Research of multifunction autonomous underwater vechile motion control[D].Harbin:Harbin Engineering University,2013:25-31.
[16]常文君,劉建成,于華男,等.水下機器人運動控制與仿真的數學模型[J].船舶工程,2002,24(3):58-60.CHANG Wenjun,LIU Jiancheng,YU Huanan,et al.A mathematical model for motion control and simulation of underwater vehicle[J].Ship Engineering,2002,24(3):58-60.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19
