排土機俯仰液壓系統(tǒng)設計及仿真
2014-08-21 09:30:26張玉姝
機械管理開發(fā) 2014年2期
張玉姝
(太原重工技術中心,山西 太原 030024)
排土機是大型露天礦半連續(xù)開采成套設備的一個重要組成部分,用來滿足大型露天礦剝離系統(tǒng)設計能力的要求。排土機主要由帶履帶的下部行走機構、鋼結構、回轉機構、帶式輸送機、可變幅卸料臂和受料臂、液壓系統(tǒng)、電控系統(tǒng)、潤滑系統(tǒng)等組成。其中,俯仰液壓系統(tǒng)主要是依靠安裝在卸料臂柱桿和塔架之間的俯仰液壓缸的動作,完成卸料臂的下落、舉升以及行程范圍內的位置保持功能。
1 液壓系統(tǒng)設計
根據(jù)俯仰液壓系統(tǒng)的功能要求,需要依靠俯仰液壓缸的拉力完成舉升功能、推力完成下落功能、Y型中位機能四通換向閥和液控單向閥聯(lián)合控制完成位置保持功能,同時采用單向節(jié)流閥控制卸料臂的速度。根據(jù)以上分析,加入電機、柱塞泵、安全閥、壓力表、加熱器、油溫傳感器、液位傳感器和回油堵塞報警等基本元件,擬訂的排土機俯仰液壓系統(tǒng)原理圖見圖1。
1.1 卸料臂舉升功能
卸料臂舉升時電液換向閥14換向至左位,高壓油由電動泵從油箱中抽取出來后,通過液控單向閥13、單向節(jié)流閥12、液控單向閥9流入俯仰液壓缸有桿腔,液壓缸無桿腔通過回油過濾器回油,活塞桿在高壓油作用下縮回,帶動卸料臂舉升。單向節(jié)流閥12用于調節(jié)液壓缸的運動速度,電磁溢流閥17用于調定泵出口壓力,安全閥11用于過載保護。油溫傳感器1和液位傳感器5監(jiān)測系統(tǒng)的油溫和液位,超出正常范圍后報警。壓力開關16和壓力表15用于監(jiān)測泵出口壓力。

圖1 排土機俯仰液壓系統(tǒng)原理圖
1.2 卸料臂位置保持功能
當需要卸料臂停在行程范圍內其他位置時,電液換向閥14換向至中位,切斷俯仰液壓缸的進油和出油通道,液控單向閥在低壓油的作用下關閉,使兩腔油液無法回流,避免閥的泄漏造成液壓缸的位置竄動,使卸料臂可以長期保持在一個空間位置上[1]。
1.3 卸料臂下落功能
卸料臂下落時電液換向閥14換向至右位,高壓油流入液壓缸無桿腔,有桿腔回油,活塞桿伸出,使卸料臂下落。單向節(jié)流閥12用于調節(jié)液壓缸的運動速度。
2 仿真和結果分析
為了檢驗所設計俯仰系統(tǒng)的控制效果,使用ITISimulationX軟件對液壓系統(tǒng)進行建模和仿真分析。SimulationX是多學科領域建模、仿真和分析的通用CAE工具[2],原理圖圖1中大部分元件可以在SimulationX的庫中直接調用,需要自行建模的只有Y型中位機能三位四通電液換向閥。根據(jù)SimulationX軟件幫助對O型中位機能四通換向閥建模的介紹,分析Y型中位機能與O型中位機能的聯(lián)系與差別,建立Y型中位機能四通換向閥模型見圖2。圖2中C1、 C2代表信號單元,其輸出為電液換向閥兩側液壓控制信號。V1、 V2、 VA、 VB、 VP、 VT代表各個閥口處可壓縮油液的容積,A1、 A2代表換向閥閥芯兩側的油腔,m代表換向閥閥芯質量,s1、 s2代表換向閥閥芯兩側彈簧,R1、 R2代 表閥殼體兩側。FAT、 FPA等代表二通比例閥邊,當C1有控制壓力時,P與B、T與A之間相通,P與A、T與B之間不相通,C2有控制壓力時,P與A、T與B之間相通,P與B、T與A之間不相通。與O型中位機能相比,模型中添加FmTA、 FmPA、 FmTB、 FmPB4個閥邊,閥邊的控制條件為abs((C1,y)-(C2,y)),用于表達Y型中位機能換向閥中位時P封閉,A、B、T互通的狀態(tài)。

圖2 Y型四通換向閥SimulationX模型

圖3 Y型四通換向閥封裝模型
使用軟件的TypeDesigner功能對建立的Y型中位機能四通換向閥進行封裝,選擇容積VP、 VT和 信號C1、C2的端口作為模型的輸入口,容積VA、 VB的端口作為模型的輸出口。封裝后的模型見圖3。利用封裝的Y型四通換向閥模型和SimulationX的液壓和控制庫,建立俯仰液壓系統(tǒng)的仿真模型見圖4。其中,為了減少仿真的計算量,對模型進行了部分簡化。根據(jù)液壓缸的需求拉力計算系統(tǒng)的流量和元件的通徑等參數(shù),設定模型中各個元件的參數(shù),給定電液換向閥兩側控制信號,仿真結束后得到液壓缸活塞桿位移曲線和兩腔壓力曲線見下頁圖5~圖8。從圖5~圖8可以看到,當電液換向閥左側給定信號時,活塞桿縮回,右側給定信號時,活塞桿伸出,在動作過程中停止給定時,活塞桿維持在當前位置始終不變,高壓側壓力逐漸下降至與低壓側相同,即完成了位置保持功能。

圖4 俯仰液壓系統(tǒng)仿真模型
3 結語
通過建模仿真分析,所設計的排土機俯仰液壓系統(tǒng),可以很好地完成卸料臂舉升、位置保持和下降的功能。各動作能夠在要求時間內平穩(wěn)完成,驗證了參數(shù)的合理性。建立的ITI-SimulationX系統(tǒng)仿真模型,可以實現(xiàn)系統(tǒng)的主要功能仿真,為系統(tǒng)的參數(shù)選擇、運行調試等提供了理論支持,降低了設計的差錯率。
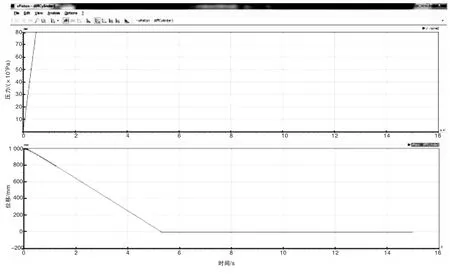
圖5 卸料臂舉升時信號及活塞桿位移

圖6 卸料臂位置保持時信號及活塞桿位移

圖7 卸料臂位置保持時兩腔壓力

圖8 卸料臂下落時信號及活塞桿位移
[1] 許福玲,陳堯明.液壓與氣壓傳動[M].北京:機械工業(yè)出版社,2007.
[2] 劉艷芳.Simulation X精解與實例[M].北京:機械工業(yè)出版社,2010.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業(yè)設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數(shù)理化·七年級數(shù)學人教版(2020年10期)2020-11-26 08:24:50
數(shù)學物理學報(2020年2期)2020-06-02 11:29:24
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
光學精密工程(2016年6期)2016-11-07 09:07:19