USBL水下定位系統拖體定位應用探討
2014-08-21 08:47:16曾凡祥胡家賦宋來勇
全球定位系統 2014年2期
曾凡祥,胡家賦,宋來勇,易 鋒
(廣州海洋地質調查局,廣東 廣州 510760)
0 引 言
近年來,隨著海洋測繪、海洋科學研究和海洋勘探開發活動對數據的精度要求越來越高,水下工作拖體(磁力拖魚、聲納拖魚、水下機器人等)的精確定位至關重要。水下拖體的定位方式一般有Layback方式[1]與超短基線定位。在淺水區域,通常采用前一種方式進行水下目標體的定位。但對于深水區聲納等物探調查,Layback方式[1]確定的拖魚位置精度過低,無法滿足海洋工程的需要,而需要采用超短基線定位系統來獲取高精度水下的目標位置。
相對于國外對水下定位系統的研究和應用,我國僅處于起步階段,目前國內對USBL 水下定位系統的使用主要集中在少數幾家單位,且大多僅用于水下機器人(ROV)、深拖等姿態穩定的調查項目,尚未用于深水磁力調查、聲納調查。本文成功將USBL水下定位系統用于深水磁力調查,獲取了磁力拖魚的精確位置,工程實例表明:將USBL水下定位系統用于磁力等拖體的定位,能滿足高精度海洋調查的需要。
1 USBL原理
USBL依據從目標到達各水聽器的聲波相位差來計算目標的俯仰角和方位角;通過測量聲波的傳播時間來計算目標的斜距,從而確定目標的位置[2]。以四個水聽器組成的基陣為例,定位原理如圖1所示。
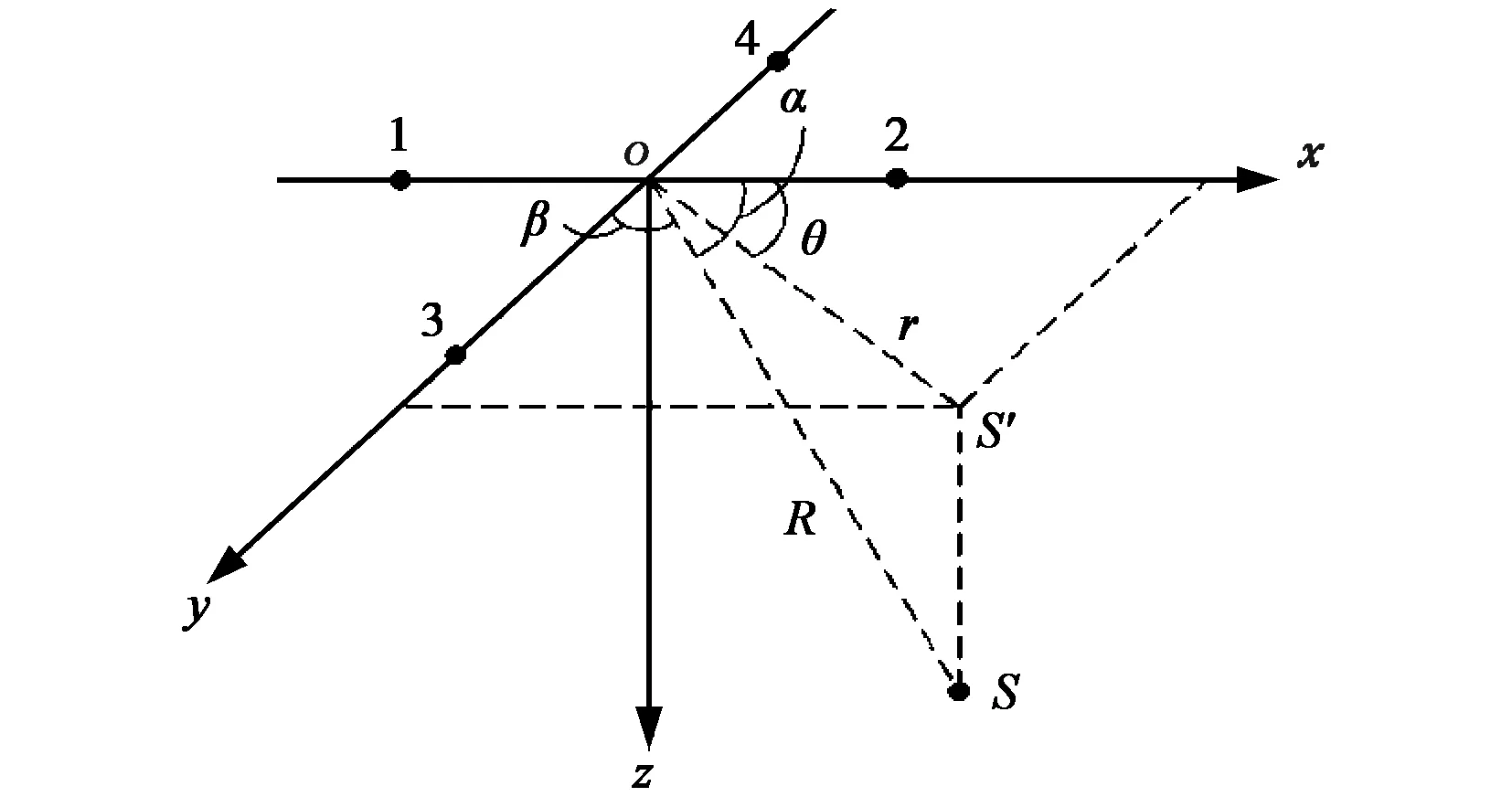
圖1 定位幾何圖
設目標位于S處,在"北東地"直角坐標系中的坐標為(x,y,z),目標徑矢為OS,R為目標到基陣中心的距離,S′為S在xoy平面上的投影,它與x軸的夾角θ為目標水平方位角。α為徑矢OS與x軸夾角,β為徑矢OS與y軸夾角。記2 號水聽器和1 號水聽器所接收聲波的相位差為φ21,4 號水聽器和3 號水聽器所接收聲波的相位差為φ43,當目標位置滿足遠場條件,在平面波模型下,根據空間幾何關系不難得出:
φ21=kdcosα,
(1a)
φ43=kdcosβ,
(1b)
式中:k為波數;d為基線長度(d≤R)。同時得到:
θ=arctan(y/x)=arctan(cosβ/cosα)
=arctan(φ21/φ34),
(2)
(3)
式中:θ為目標方位角;r為目標水平斜距。
式(1)~(3)為超短基線定位計算的基本公式,α、β和R為測量值,測得α和β值即可按上述諸式計算目標的位置參數。
(4a)
(4b)
因此,超短基線實際的測量值為φ21、φ43和R.R可通過回波測距測得,具有很高的精度,暫不考慮其測量誤差對定位的影響。x和y的測量精度則主要取決于φ21和φ43的測量精度。而陣元間相位差常用自適應相位計來測量,有較高的精度[3]。
2 USBL組成
USBL系統由水下定位部分和水上定位組成,如圖2所示,水上定位由GPS完成。而水下定位系統又包括聲學定位系統和姿態傳感系統。水下聲學系統由發射接收單元、聲學應答器(簡稱信標)組成。
超短基線定位聲學系統可分為水下聲學測量設備和水上數據采集處理設備兩大部分組成,其中水下聲學測量設備由安裝在船體的聲學換能器(發射/接收單元)和安裝在水下移動載體的信標組成。信標是放置在海底或載體上的發射接收器,只有在收到詢問信號時才回答,通常每一應答器對應一種頻率,以加以區分不同的信標信號。
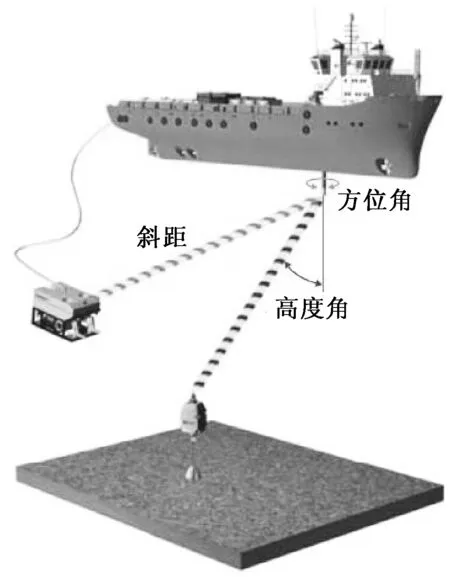
圖2 USBL系統示意
水上數據采集與處理部分一般為集成于一體的主機,含控制單元與電腦主機。用于各種外接設備的連接與數據的數據輸入/輸出控制,同時控制聲學信號的發射、所接收信號的處理和各設備位置的計算等。
3 USBL應用實例
在某井場預作業區域(水深約為690 m),需確定作業區域內海底光纜的走向及位置。在工區水深且海底水流狀況不明的情況下,磁力調查的作業鋼纜過長,無法根據常規方式計算出磁力拖體的精確定位,進而進一步計算出光纜的位置及走向。為獲取準確的光纜位置,決定使用Ranger Pro USBL超短基線水下定位系統(精度為斜距的0.2%)對磁力拖魚進行定位。
3.1 姿態傳感器校準
對于超短基線水下定位系統而言,縱傾、橫搖、艏向和探頭的位置信息至關重要,它們直接決定著目標定位的精度。為取得精確的傳感器改正參數,必須進行校準試驗[4-5]。
Ranger Pro USBL的校準需具備以下幾個條件:
1)將DPT(校準信標)固定于海底;
2)擁有準確的聲速剖面數據;
3)GPS接收機、光纖羅經等外部傳感器正常工作;
4)船舶沿既定測線航行并時刻始終保持較小的偏航距。
選擇了水深約為300 m,地勢平坦的區域進行校準,校準步驟如下:
1)檢查DPT信標。為確保DPT信標投放/回收的成功率,下水前仔細檢查DPT聲學釋放器、通訊情況、電池電量,確保釋放鉤已合上、信標已打開;
2)投放DPT信標。用一條1.5 m左右的鋼纜將信標和水泥重塊相連,再用吊機將信標和重物放入水中;
3)設計測線。當DPT信標到達海底后,從水下定位系統中記錄下具體位置。再以信標為中心點,設計6根長約500 m的測線;
4)記錄校準數據。指揮船只按設計測線航行,測線在線上時啟動水下定位系統的校準記錄程序,將所有的外設及定位數據記錄至系統中;
5)校準數據處理。利用Ranger Pro自帶的處理軟件進行校準數據的處理,如處理過之后的數據的定位誤差太大,則需重新實施部分或全部測線的校準,校準精度高則可直接將校準結果輸入至水下定位系統中,作為正式作業的補償參數。
6)DPT信標回收。在USBL控制單元中發出釋放指令,指令發出后時刻關注DPT信標的位置及水深,并根據信標出水前的距離和方位數據進行信標的回收。
處理后的校準結果離散圖如圖3所示。
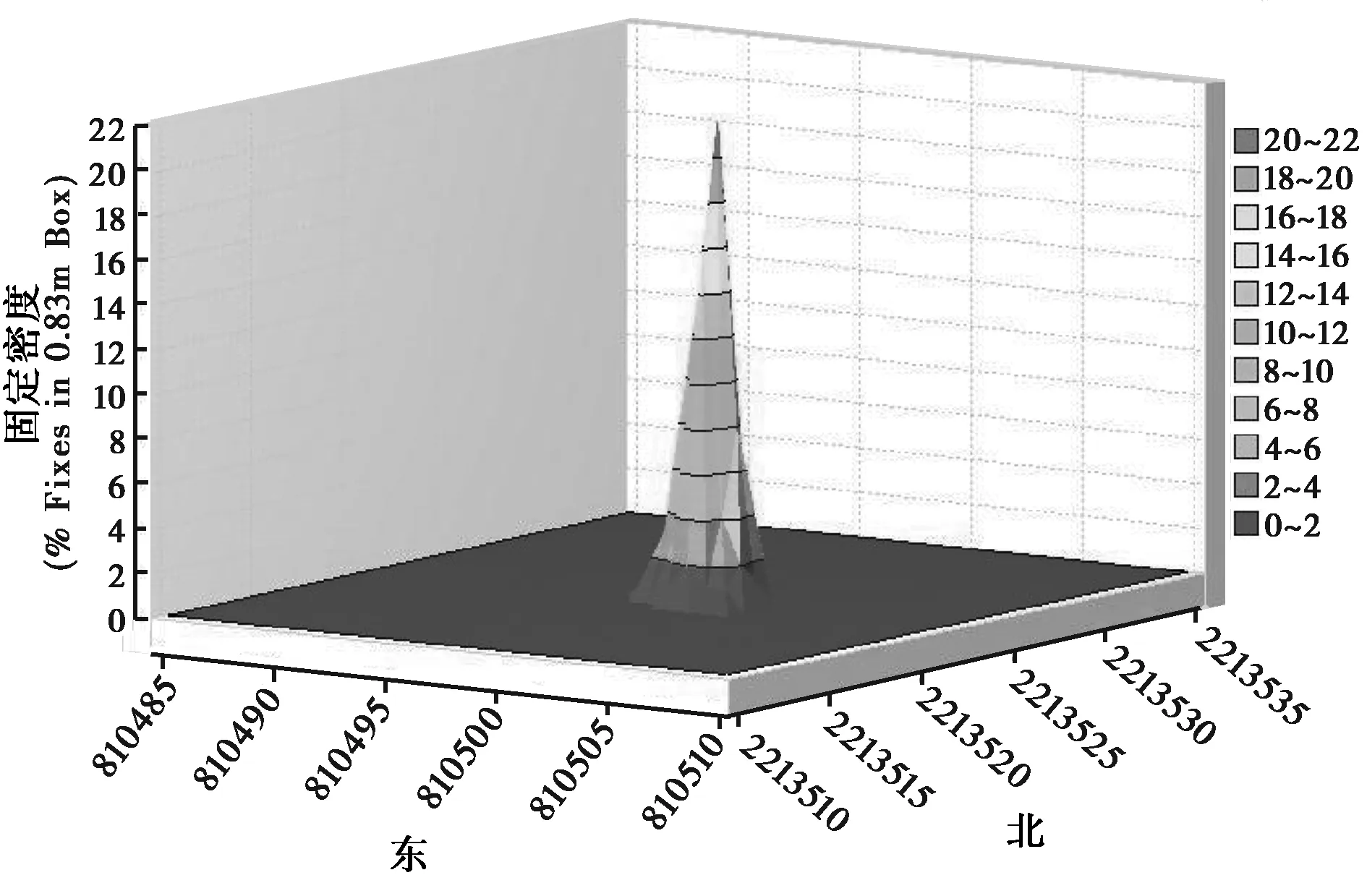
圖3 校準結果3D離散圖
校準結果如表1和表2所示。
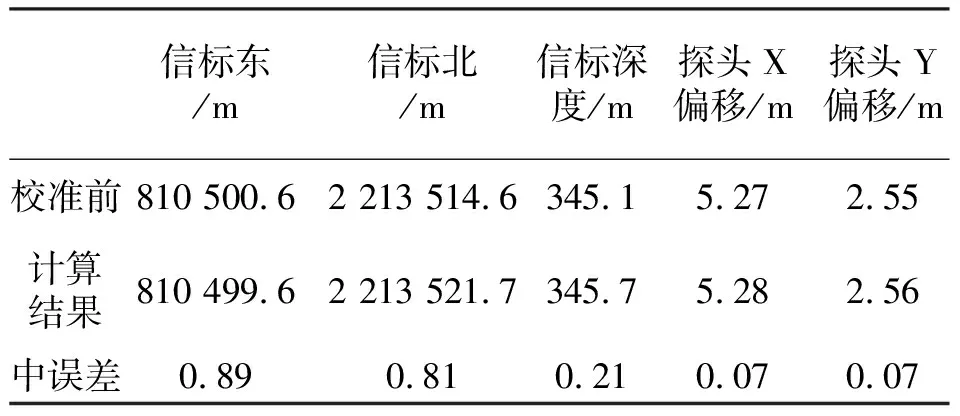
表1 信標校準結果
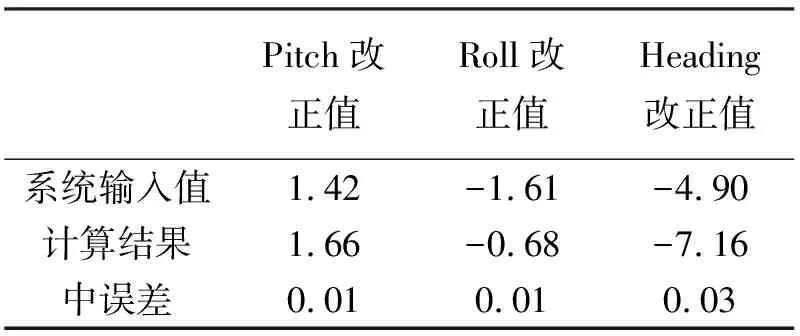
表2 姿態校準結果
校準結果計算出來后,將其輸入至系統即可在今后調查中對相應的參數進行改正。
從表1和表2可以得出以下結論,在水深300 m的區域,進行參數校準之后的DPT信標東/北坐標的中誤差均在1 m以內,精度高,完全能滿足磁力拖魚定位的需要。
3.2 信標的安裝
因磁力拖魚附近的磁場的變化會干擾所測得的磁場數據,影響調查資料的質量及其可靠性,不能將水下定位信標固定在拖魚附近,只能將信標固定在遠處。
磁力拖魚的前方為凱弗拉軟纜,長15 m,不能固定信標。軟纜與鋼纜相連,加工卡環固定信標,但在水深690 m的磁力調查中,所放的鋼纜可能有2 300 m,而水下定位信標一端為高精密水聽器,不能碰撞。但作業情況復雜,鋼纜與磁力拖魚在水中的具體形狀也無法確定,為防拖魚觸底時信標的安全,將信標固定在距拖魚65 m的位置。
水下定位信標為圓柱體,為避免傷害鋼纜,設計了信標專用的不銹鋼夾板,夾板的一端為環狀,用于卡信標,另一端可上螺絲、已預留凹槽的平面夾板,用于卡住鋼纜。為減小擠壓力,在平面夾板內側安置薄銅片。
3.3 定位實施過程及結果分析
船到達指定位置、信標下水,實時觀察USBL定位狀況。當磁力拖魚到達預計高度后,在RANGER PRO水下定位系統與綜合導航系統中分別記錄相應的GPS天線、水下定位信標的位置。實際作業過程中,因鋼纜長、船速過快等原因,水下定位信標常無應答,當船速減至3節左右時,水下定位信標與換能器通訊正常,定位數據連續穩定,極少數據跳點出現。
調查工作結束即可開始計算光纜的位置。傳統的水下拖拽式目標定位方法中,常采用Layback方式,即根據GPS天線、絞車、船艘向、纜長的相互關系來計算拖魚的位置。
但磁力鋼纜的長度、海況的好壞、海水的流向流速均會影響傳統目標定位的精度。而USBL能很好的解決這一難題。為便于比較Layback方式與USBL,截取少量調查數據進行信標位置的計算:
從表3中可看出,采用傳統方式計算的信標位置與水下定位信標的觀測值相差較大,最大達246 m;從圖4、圖5可以得出,當船艏向與信標-換 能器的方位角差值較大時,Layback計算出的點位誤差較大,從圖4可看出,該差值最大超過8°,如受海況差、水流急或船舶駕駛不熟練等的影響,方位角差值將更大,這意味著傳統方式計算的點位誤差會更大,無法滿足光纜調查等項目的精度要求。
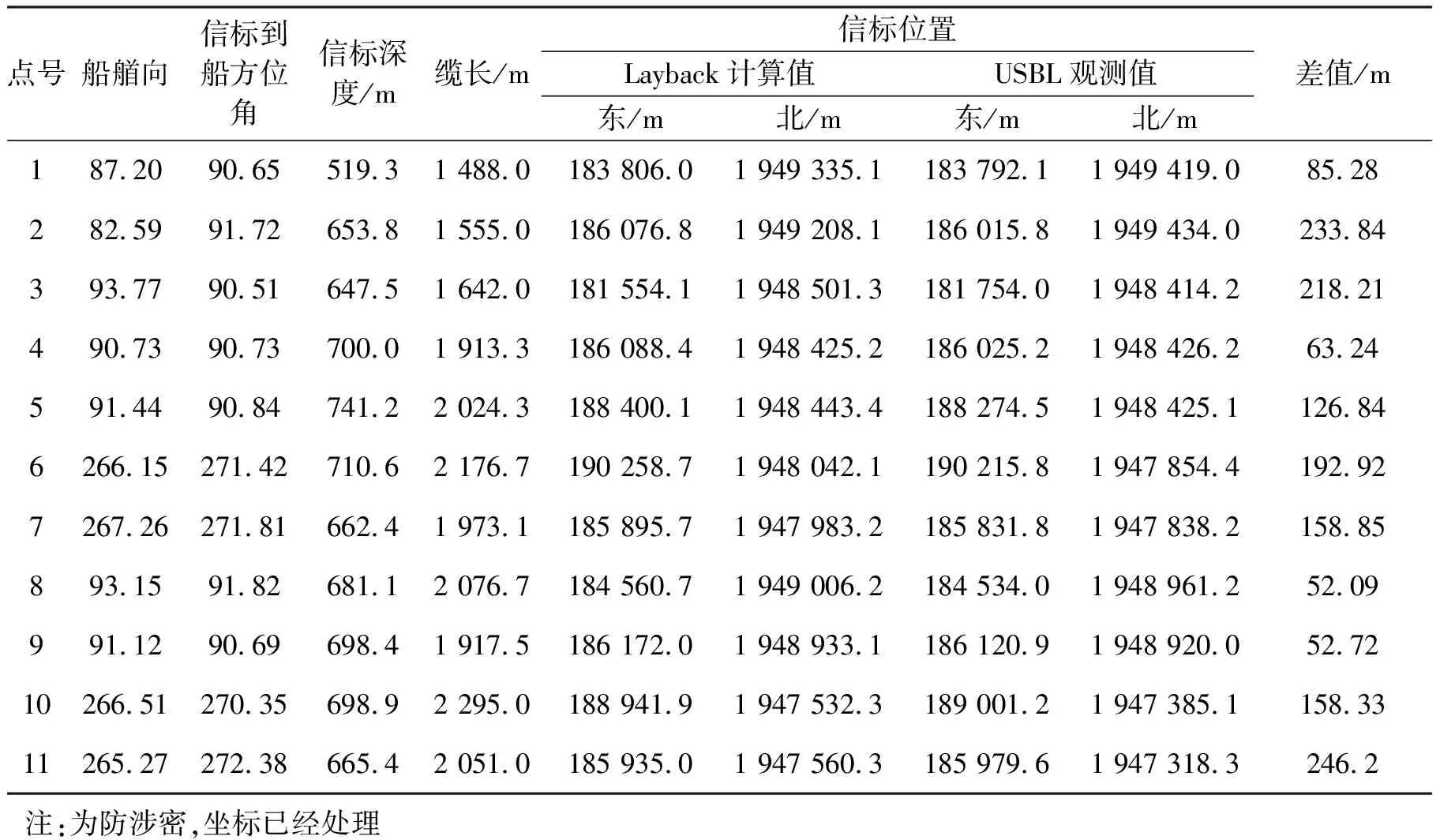
表3 定位信標結果比較
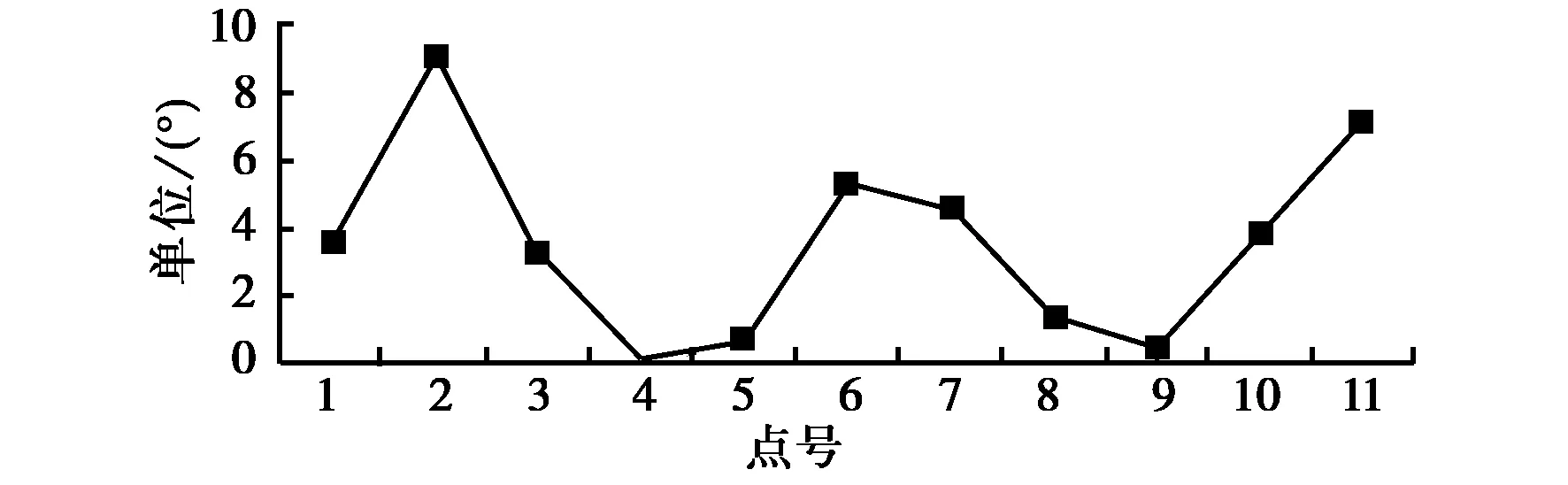
圖4 船艏向與信標-換能器方位的差值
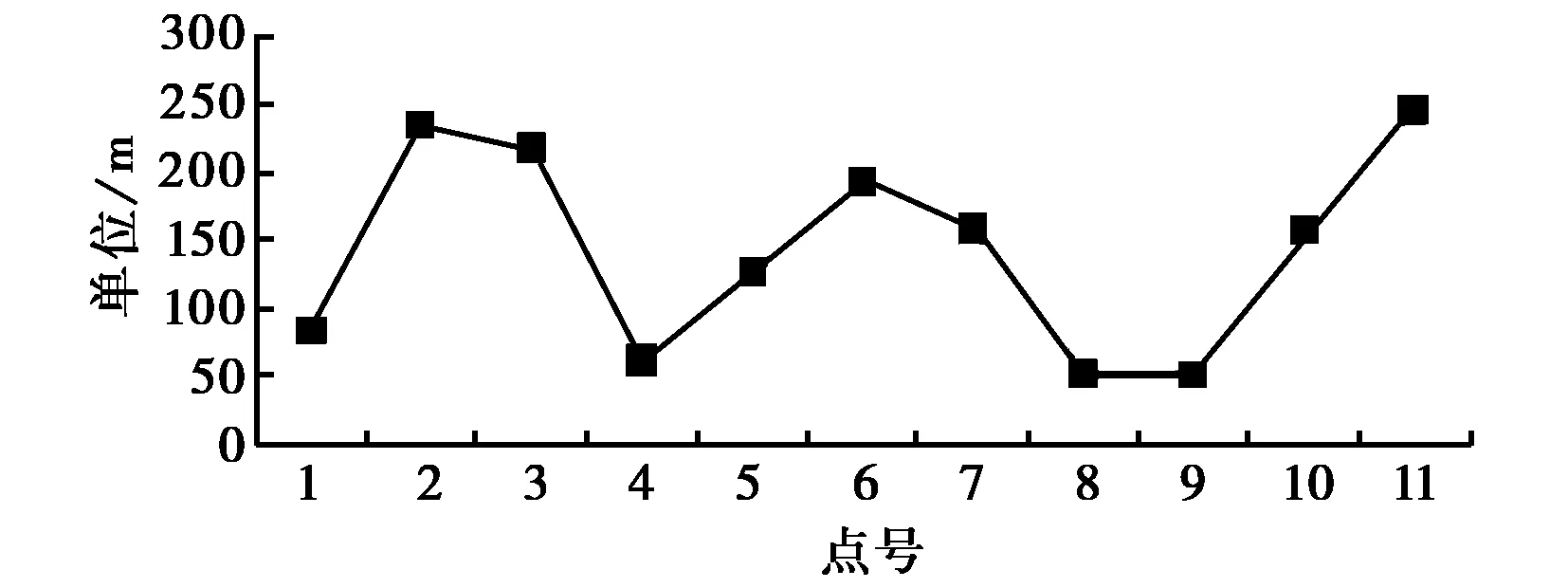
圖5 Layback計算值誤差
影響計算點位誤差的另一個重要因素為鋼纜長度誤差。在所有的磁力或聲納調查中,鋼纜的長度都是通過感應器感應滑輪轉動的圈數來計算長度的,但鋼纜的粗細、收/放鋼纜速度、海浪起伏等都能影響滑輪的受力狀況,從而導致計數器短時失靈,得到錯誤的鋼纜長度值,加大計算點位的誤差。
基于上述原因,在深水區域,傳統方式計算的磁力拖魚的位置精度低、不穩定。而USBL系統只要校準結果精度高,即可精確定位,進而根據信標與鋼纜的相對位置得出磁力拖體的準確位置,實現海底障礙物、通訊光纜等的精確定位,為水下工程提供可靠的勘察資料。
4 結束語
本文在深水磁力調查中引入USBL進行磁力拖魚的定位,通過分析水下定位系統實測值與傳統Layback方式的計算值、傳統方式的誤差因素與USBL的定位優勢。實測結果表明:USBL水下定位系統應用于深水拖體定位,能獲得可靠穩定的高精度水下目標位置,可滿足高精度水下作業工程的需要。
[1]隋海琛,劉彥祥,姜曉暉.海洋調查中水下目標位置的確定[J].海洋測繪,2004,24(3):32-34.
[2]蔡 平,梁國龍,惠俊英,等.采用自適應相位計的超短基線水聲跟蹤系統[J].應用聲學,1993,12(3):19-23.
[3]喻 敏,惠俊英,馮海泓,等.超短基線系統定位精度改進方法[J].海洋工程,2006,24(1).
[4]趙建虎.現代海洋測繪[M].武漢:武漢大學出版社,2007.
[5]劉文勇,江 林.超短基線水下定位校準方法的探討與分析[J].測繪通報,2011(1):82-84.
