變速恒頻雙饋風力發電機空載并網控制策略
2014-08-17 00:23:26劉新宇楊慧麗
技術與市場 2014年12期
劉新宇,楊慧麗
(華北水利水電大學,河南鄭州450011)
0 引言
世界上的煤炭、石油等不可再生能源日益枯竭,風力發電作為一種清潔可再生的新能源,對于緩解能源危機、保護環境具有非常重要的意義[1]。目前,除了水電以外的任何可再生能源中,風力發電的潛力最大。風電不僅發電成本在逐漸降低,而且在技術上也日趨成熟,已經成為電力系統中增長最快的新能源發電方式之一[2]。變速恒頻雙饋風力發電技術由于具有風能轉換效率高、機電系統柔性連接、功率因數可調、勵磁變換器容量小等特點,已在風力發電系統中占據主導地位,并引領了風力發電的發展方向[3]。
在風力發電機組啟動前,需要對發電機進行并網前調節,使發電機定子電壓和電網電壓在幅值、頻率、相位上均保持一致,以滿足并網條件。風力發電機組單機容量越來越大,目前已經發展到MW 級水平,機組并網電流對電網的沖擊已不能忽視,它不但會引起電網電壓大幅下降,而且會對發電機組各部件造成損壞,甚至還會威脅其他發電機組的正常運行。因此,必須通過合理的并網技術來抑制并網沖擊電流。并網技術己成為風力發電技術中的一個不可忽視的問題[4]。
本文將建立雙饋風力發電機在d-q 旋轉坐標系下的空載數學模型,在定子磁場定向矢量控制原理的基礎上,建立變速恒頻雙饋風力發電機空載并網控制策略,應用Matlab/Simnlink軟件對其進行仿真分析。
1 變速恒頻雙饋風力發電系統
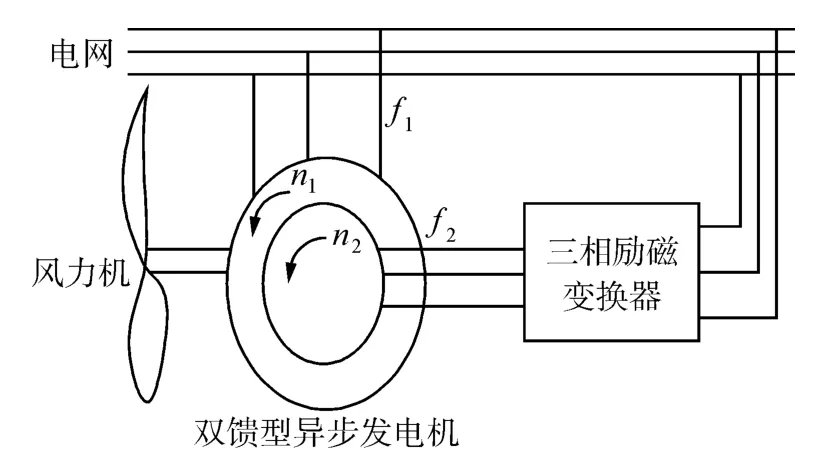
圖1 變速恒頻雙饋風力發電系統圖
由圖1 看出,雙饋風力發電機的定子直接連接到電網上,轉子通過三相勵磁變換器進行交流勵磁,電磁功率通過定子、轉子雙通道與電網進行交換。為了實現變速恒頻運行,當風速變化、發電機轉速相應變化時,應調節轉子勵磁電流的頻率以保證定子輸出頻率恒定。根據電機學的知識可知[5],DFIG 穩定運行時,定、轉子旋轉磁場相對靜止,即

因 f1=n1/60 及 f2=n2/60,故有

其中f1、f2分別為DFIG 定、轉子電流的頻率;n1為定子磁場的轉速,即同步轉速;n2為轉子磁場相對于轉子的轉速;nr為DFIG 轉子的電轉速。
從式(2)可知,當發電機轉速nr變化時,可通過調節轉子勵磁電流頻率f2保持定子輸出電能頻率f1恒定,這是變速恒頻運行的原理。當發電機亞同步運行時,f2>0,轉子繞組相序與定子相同;當發電機超同步運行時,f2<0,轉子繞組相序與定子相反;當發電機同步運行時,f2=0,轉子進行直流勵磁。
2 雙饋風力發電機空載數學模型
為了研究DFIG 空載并網控制原理,需要推導DFIG 的空載數學模型。空載并網前,其定子側為開路,定子各分量電流為零,故存在約束關系:isd=0,isq=0,將此約束條件代入同步旋轉d-q-0 坐標下用于矢量控制的DFIG 電機數學模型[6],可得DIFG 空載時方程。
定子磁鏈方程:

轉子磁鏈方程:

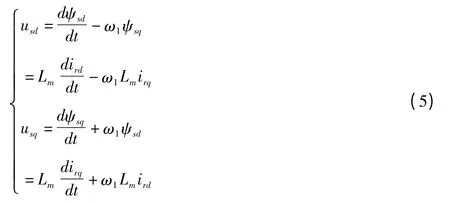
定子電壓方程:
轉子電壓方程:
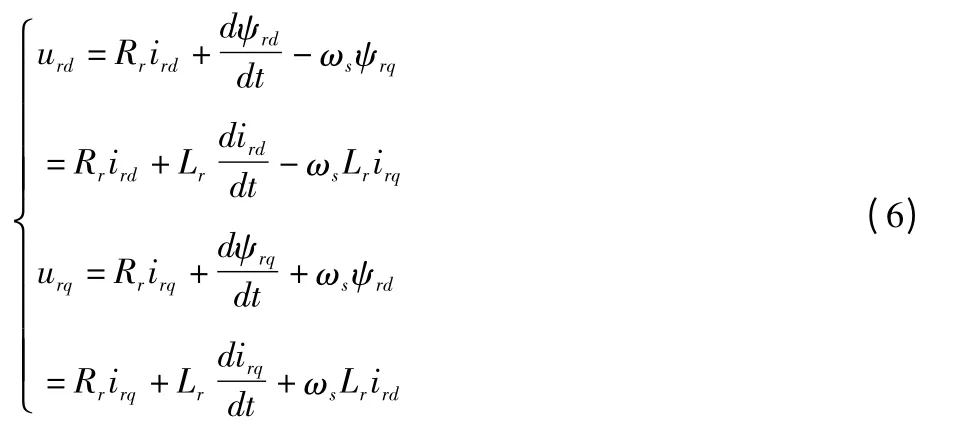
(3)~(6)式即為DFIG 空載運行的數學模型。為了分析方便,下標s 代表定子量;下標r 代表轉子量;下標d 代表d 軸分量;下標q 代表q 軸分量。其中Rr為轉子繞組各相電阻;Lm為定、轉子同軸等效繞組間的互感;Lr為轉子等效兩相繞組的自感;isd、isq、ird、irq為定、轉子電流的 d 軸和 q 軸分量;ψsd、ψsq、ψrd、ψrq為定、轉子磁鏈的 d 軸和 q 軸分量。usd、usq、urd、urq為定、轉子電壓的d 軸和q 軸分量;ω1為發電機的同步旋轉速度;ωr為轉子的旋轉速度;ωs=ω1-ωr為坐標系相對與轉子的旋轉速度。
3 定子磁場定向下發電機空載并網控制策略
根據DFIG 空載運行時的數學模型,可以推導基于定子磁鏈定向的DFIG 空載并網控制策略。因為工頻50 Hz,定子繞組的電阻比其電抗要小得多,通常可以忽略電機定子繞組電阻,采用定子磁鏈定向,則有[7]

將(7)代入式(5)中,可得

由此可得

將(8)和(10)式代入(3)式可得

即空載并網時,DFIG 定子磁鏈保持恒定,其值為定子電壓(電網電壓)與同步角速度之比。再將式(10)代入式(6),同時忽略其動態過程,可得

式(12)可以作為電網電壓定向的變速恒頻雙饋風力發電空載并網前DFIG 轉子電流內環控制器的設計依據。根據(7)~(12)式,可確定變速恒頻雙饋風力發電機空載并網控制策略,其控制原理如圖2 所示。
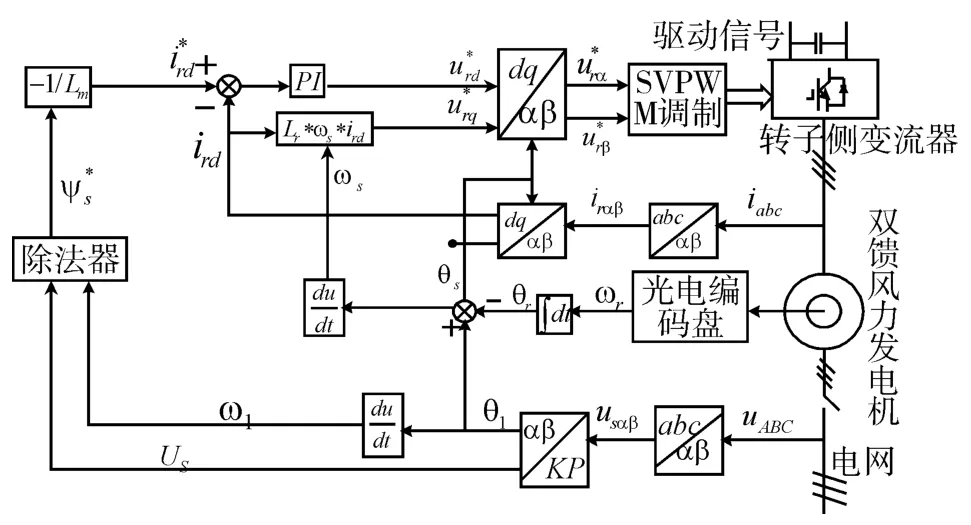
圖2 基于定子磁場定向的空載并網控制原理框圖
圖2 中,空載并網控制是從檢測三相電網電壓 uA、uB、uC開始的,根據檢測的三相電壓計算出電網電壓空間矢量的幅值Us和相角θ1。θ1和轉子角位置角θr一起用于矢量控制中的坐標變換。Us和同步角速度ω1通過(11)式可計算出DFIG 的參考定子磁鏈,然后根據(10)式計算出轉子d 軸電流參考分量,同時可知q 軸電流參考分量應該強制為零。
由(12)式可見,urd和ird之間的傳遞函數存在一階微分環節,所以可以通過對參考值與ird的誤差經過PI 調節后直接得到轉子d 軸電壓參考分量;按式(12)求得轉子q 軸電壓參考分量經過坐標變換后得到轉子電壓分別在αr軸和βr軸上的參考分量根據進行 SVPWM調制,產生轉子側變換器的控制信號,實現對DFIFG 的空載并網控制,其控制原理框圖如圖2 所示。
4 仿真分析
在工程技術領域,運用計算機作為輔助工具進行仿真研究已經受到廣泛的歡迎。近年來,在電氣控制方面比較流行使用MATLAB 軟件作為仿真工具,因為它具有非常強大的功能,作為一種編程語言和可視化工具,MATLAB 可以解決工程科學計算和數學學科中的許多問題。其中的Simulink 組件更是針對實現工程問題的模型化和動態仿真而設計出的產品,具有模塊化、可重載、可封裝、面向結構圖編程及可視化等優點,省去了算法分析和程序編制的過程,因此大大提高了系統仿真的效率和可靠性。
本文利用MATLAB 7.1/Simulink 軟件建立系統主要部分的仿真模型并設置相應系統仿真參數如下:
雙饋感應電機:功率6 kw,轉子側輸入電壓380 V,電流3.2 A,定子側輸入電壓380 V,電流6.8 A,極對數2,最大轉速1 800 轉/min。Rs=1.37 Ω,Rr=1.65 Ω,Lls=0.0033 Η,Llr=0.0043 Η,Lm=0.158 Η。

圖3 并網前定子端電壓與電網電壓波形圖
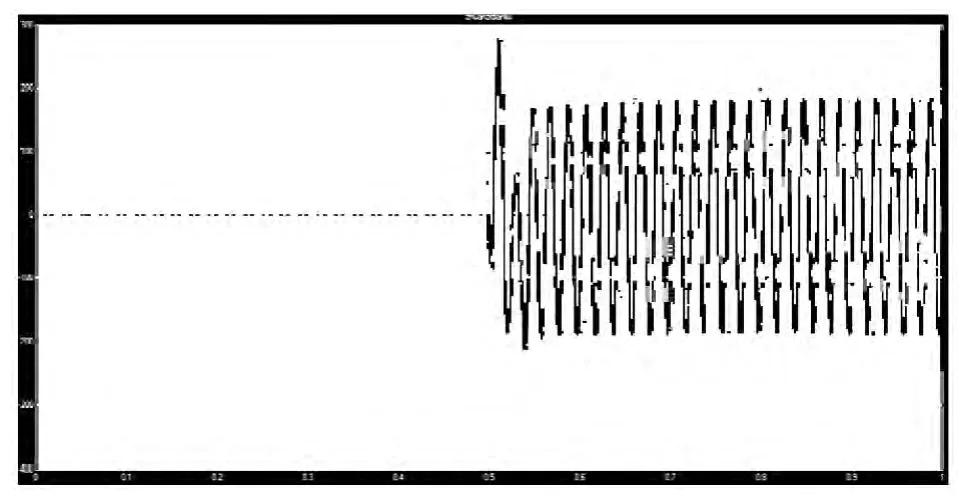
圖4 并網瞬間定子端電流的過渡過程波形圖
圖3 為并網前定子端與電網端電壓的對比仿真波形圖。由此仿真結果圖可以看出,采用本文的空載并網控制策略下,在0.5 s 并網前定子端電壓與轉子端電壓在幅值、相位、頻率上達到一致。
圖4 為并網瞬間雙饋電機定子端電流的波形圖。可以看出,采用本文的空載并網控制策略下,在0.5 s 并網瞬間的沖擊電流大大減小,且并網瞬間的沖擊電流僅為并網后定子端電流的1.5 倍。
5 結語
本文重點討論了雙饋風力發電機的空載并網控制策略,將磁場定向矢量控制技術應用到雙饋風力發電機的空載并網控制中,在Matlab/Simnlink 環境下建立了空載并網仿真模型,并進行了仿真分析。仿真結果表明,該控制策略可以在變速情況下有效調節發電機定子側電壓的頻率、幅值和相位,使其與電網電壓保持一致,從而滿足并網條件,使雙饋風力發電機與電網之間實現無沖擊并網。
[1]Shahabi M,Haghifam M R,Mohamadian M,et al .Microgrid dynamic performance improvement using a doubly fed induction wind generator[J].IEEE Trans on Energy Conversion,2009,24(1):139 -141.
[2]Chowdhury B H,Chellapilla S.Double-fed induction generator control for variable speed wind power generation[J].Electric Power Research,2006,76(9):786 -800.
[3]劉其輝,賀益康,卞松江. 變速恒頻風力發電機空載并網控制研究[J].中國電機工程學報,2007,27(3):6 -11.
[4]Muller S,Deicke M,De Doncker R W .Doubly -fed induction generator systems for wind turbines[J].IEEE Industry A pplications Magazine,2008,8(3):26 -33.
[5]賀益康,胡家兵,徐烈. 并網雙饋異步風力發電機運行控制[M].北京:中國電力出版社,2011.
[6]田濤. 雙饋變速恒頻風力發電空載并網控制策略研究[D].銀川:寧夏大學,2009.
[7]任永峰,安中全,李靜立,等.雙饋式風力發電機組柔性并網運行與控制[M].北京:機械工業出版社,2011.
猜你喜歡
故事作文·高年級(2021年12期)2021-12-21 02:32:35
能源工程(2020年6期)2021-01-26 00:55:22
山東冶金(2019年3期)2019-07-10 00:54:04
消費導刊(2018年10期)2018-08-20 02:57:02
大電機技術(2017年3期)2017-06-05 09:36:02
軍事文摘(2016年16期)2016-09-13 06:15:49
通信電源技術(2016年1期)2016-04-16 04:57:26
電測與儀表(2016年20期)2016-04-11 11:38:24
智能建筑電氣技術(2015年5期)2015-12-10 05:52:30
電測與儀表(2014年17期)2014-04-04 11:56:50
