Mecanum輪全方位移動機器人技術及其應用
2014-08-16 09:13:20王興松
機械制造與自動化 2014年3期
關鍵詞:移動機器人
王興松
(東南大學 機械工程學院,江蘇 南京 210096)
1 全方位移動的定義及常見形式
全方位移動機器人是在平面內具有前后移動、左右移動和原地回轉三個獨立運動自由度的移動機器人。由于其具有原地零半徑回轉和橫移的特點,非常適合在狹小空間或對機器人的機動性要求高的場合[1]。另外,在需要精確定位或跟蹤復雜路徑時,利用其可以原地回轉的特點,全方位移動機器人能適合更為復雜、緊湊的工作環境[2]。
目前國內外很多機構展開了全方位移動機器人的研制工作[3-4],在機器人車輪的設計制造、機器人上車輪的輪子配置方案、以及機器人的運動分析和路徑規劃等方面,進行了廣泛的研究,形成了具有不同特色的全方位移動機器人,較為常見有三種[5]:麥克納姆輪式全方位移動機器人、全輪偏轉式全方位移動機器人和caster輪式全方位移動機器人,見圖1(a)-(c)[6-7]。
其中,基于Mecanum輪的全方位移動機器人具有整車機械結構簡潔、運動控制靈活、通過性好等優點,近年來得到更為廣泛的應用[8-9]。

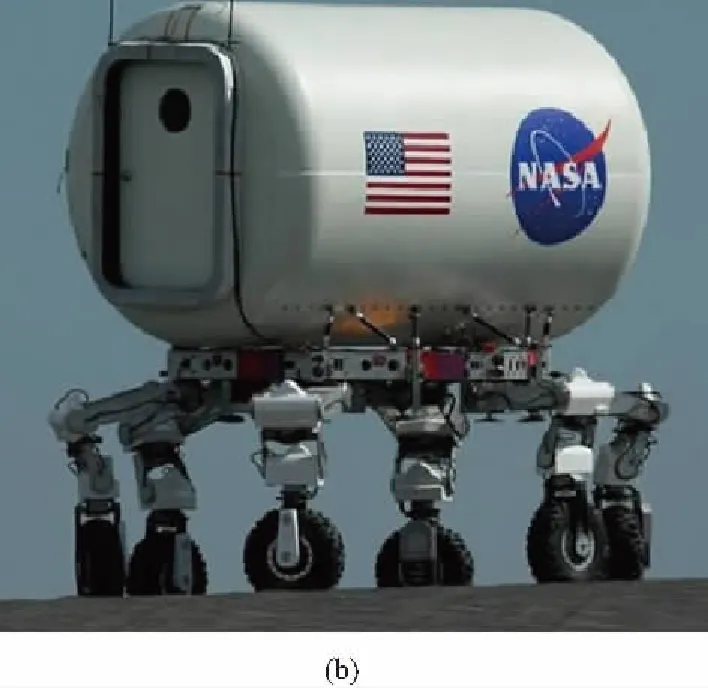

圖1 常見的三種全方位移動機器人結構
2 Mecanum輪全方位移動的原理
麥克納姆輪(Mecanum Wheel)是一種全方位移動車輪,1973年由瑞士人Bengt Lion發明[10],該輪的特點是在傳統車輪的基礎上,在輪緣上再沿與軸線成α角方向安裝若干可以自由旋轉的小輥子,這樣在車輪滾動時,小輥子就會產生側向運動。通過麥克納姆輪的組合使用和各車輪轉動方向和速度的協調控制,可以使車體得到運動平面內的任意方向移動和轉動。
通常來說一個麥克納姆輪含有多個輥子,并按照一定的要求裝配而成,均勻地排列在輪轂的周圍,由于其外觀上與斜齒輪相似,麥克納姆輪也有齒輪嚙合時相類似的問題:為了保證運動的平穩性,當前一個輥子與地面即將分離時,后一個輥子必須與地面接觸。
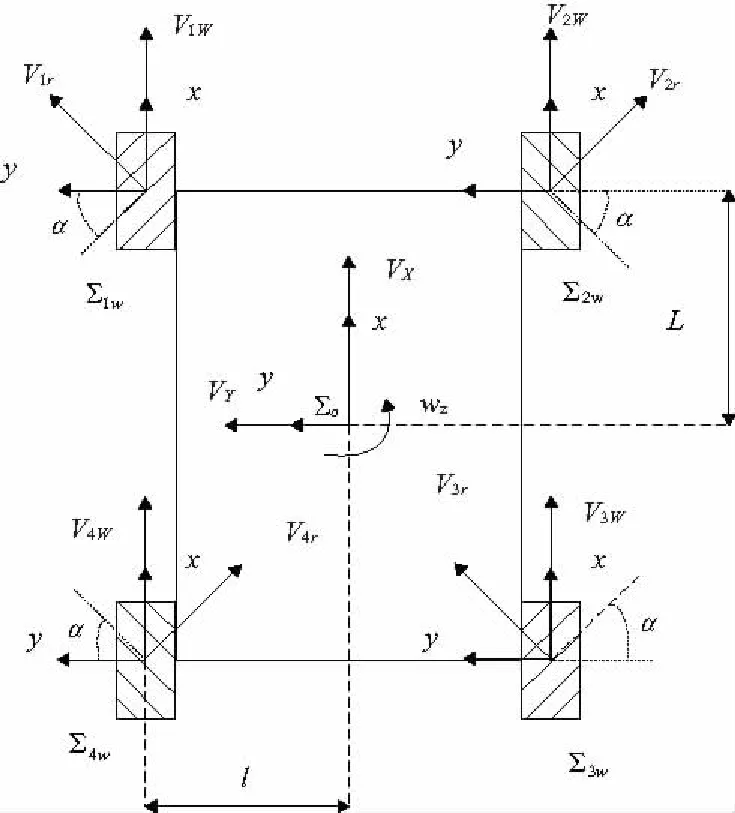
圖2 麥克納姆輪式全方位移動機器人運動學分析示意圖

根據Mecanum輪機器人運動學分析結果,在已知機器人x方向移動的速度vx、y方向移動的速度vy,以及繞中心點O垂直軸轉動角速度ωz時,四個車輪的線速度Vi(i=1,2,3,4)可分別由以下各式計算:
V1=vx-vytanα-(Ltanα+l)ωz
(1)
V2=vx+vytanα+(Ltanα+l)ωz
(2)
V3=vx-vytanα+(Ltanα+l)ωz
(3)
V4=vx+vytanα-(Ltanα+l)ωz
(4)
同樣,在已知四個輪子轉速的情況下,也可以用過這四個輪子的轉速獲得麥克納姆輪全方位移動機器人在坐標系∑0中的運動速度:
(5)
(6)
(7)
由式(1)-(4),對前后移動、左右移動、原地旋轉、斜向移動等典型移動情況,可計算出的各車輪的轉動方向和速度,將這些計算結果集中表示,即可獲得常見的Mecanum全方位移動情況的車輪轉向關系(圖3)。

圖3 常見機器人全方位移動與車輪的轉動關系
3 Mecanum輪全方位移動技術的關鍵技術
3.1 Mecanum輪的設計理論
輥子輪廓設計是Mecanum輪全向移動機器人平穩運行的關鍵,要綜合考慮輪子的運動連續性和輥子接地重合度、輪軸高度一致性和平穩性、輥子軸的支承強度等。
Mecanum輪的結構設計,最重要的是輪轂和小輥子外輪廓線的設計。圖4為Mecanum輪的正視圖和側視圖。從圖中可以看出,小輥子的外輪廓面在一個圓柱體的圓柱面上,這是運動過程中車體平穩的要求。
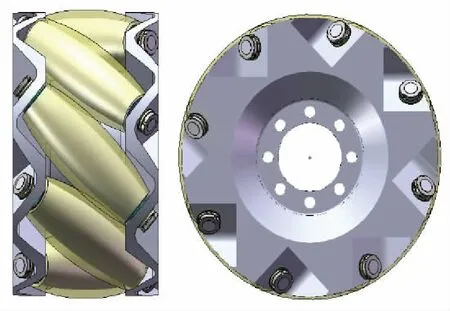
圖4 兩端支撐形式的Mecanum輪正視圖和側視圖

γ·R=B
(8)
輥子的外輪廓線并不是圖中所示的整段的等速螺旋線AA',而是取螺旋線中間的一段,例如圖5中的DE段。
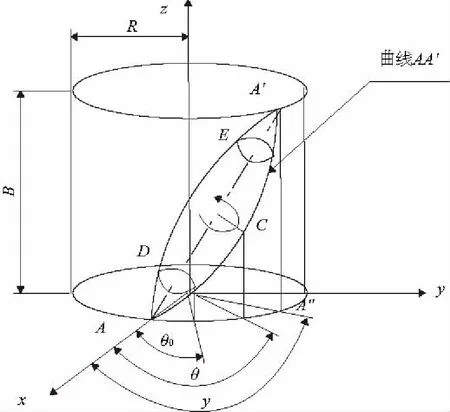
圖5 輥子外輪廓線生成圖
目前,Mecanum輪常用的有兩端支撐結構(圖6a)和中間支撐結構,中間支撐又分為中間單支撐(圖6b)和中間雙支撐(圖6c)。兩端支撐優點是受力狀態比較好,運動平穩,同樣的承載下,車輪尺寸比中間支撐小,適合于大型承重車輛;缺點是結構復雜,對地面的要求比較高,如果地面高低不平,輪轂容易與地面接觸。中間支撐的優點是結構相對簡單,對地面要求低,車輛通過性好;但輪轂和輥子的受力狀態不好,車輪尺寸相對較大。

圖6 Mecanum輪常見的支撐結構[11]
3.2 輪轂的精密加工技術
輪轂采用一體化設計,最重要的參數有:輪轂的寬度W,輪轂上安裝輥子的孔的位置。這2個參數在Mecanum車輪計算過程中已經得到。
由Mecanum輪的結構可知,不論采用哪種支撐結構,輪轂上用于安裝輥子軸的支撐孔,既要保證沿圓周的均勻分布精度,又要保證其孔的傾斜角度精度以及與輥子軸軸承的配合精度。圖7和圖8分別是兩端支撐和中間單支撐兩種支撐結構的典型輪轂結構,由此可見其加工難度。
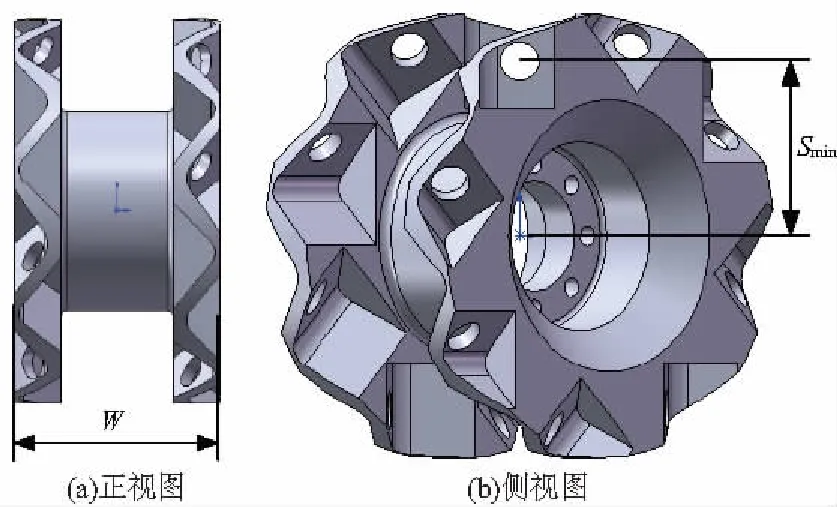
圖7 兩端支撐Mecanum輪輪轂
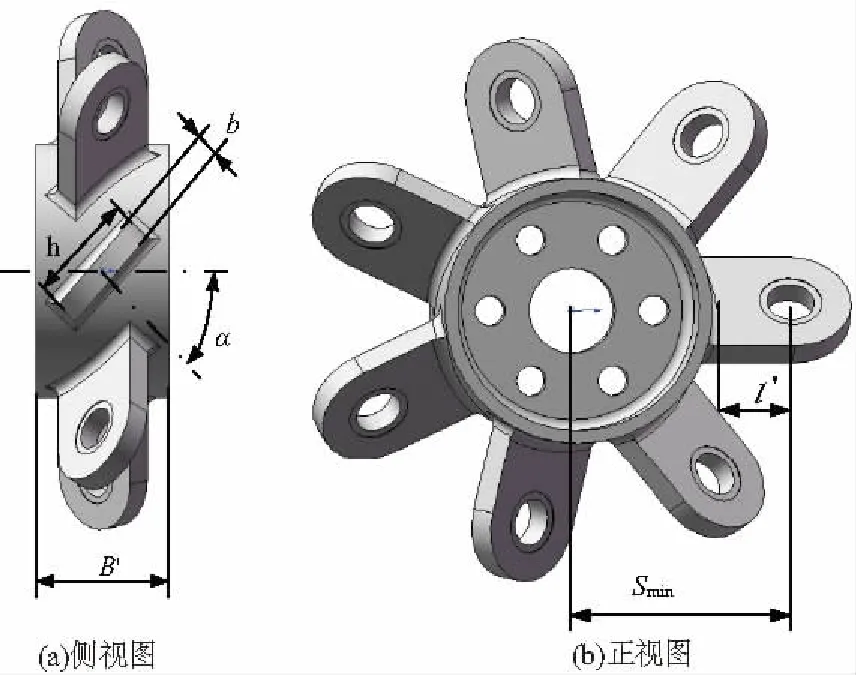
圖8 中間單支撐Mecanum輪輪轂
目前,可以采用高精度五軸聯動數控機床加工,也可采用普通數控機床加精密分度頭和專用夾具加工,加工成本都比較高。
Mecanum輪輥子軸線與輪轂軸線的夾角α對于理論分析和設計加工都是一個重要參數,理論研究中常采用α=45°。實際上,α角是根據電機及負載的尺寸通過幾何參數方程的計算獲得。由于加工、裝配的誤差,α的真實值與理論值常存在一定的偏差,該偏差會對機器人的速度及運動軌跡產生一定的影響。
3.3 精確運動控制
現階段全方位移動機器人的應用主要是在將全向移動機器人作為一個移動平臺,通過平臺上的其他小位移機構執行相應功能動作,如與機械臂組成的可移動加工、裝配移動機械臂。欲使移動機器人系統移動一微小位移,一般做法是通過全方位移動平臺上的小位移機構來實現。如適用于飛機起落架的就位儀、導彈的掛彈車,就是通過在全向移動平臺上搭載的各種執行機構和驅動系統來進行小位移的移動以實現起落架的對接、拆卸,導彈的掛載等。但這沒有完全發揮出全向移動機器人運動靈活的特點。若可以實現整個全方位移動機器人平臺的精確運動控制,實現小位移精密定位,則可簡化整車結構,降低成本。
由其逆運動學方程可知,Mecanum輪式全向移動機器人的整體運動是由其結構參數和四個車輪的速度控制的。而車輪安裝的位置精度、車輪慣性、地面不平、輥子包膠的變形、以及各個電機輸出的實際轉速與控制輸入量之間關系的不一致性,這些影響因素導致移動機器人車體運動的實際速度與理論轉速不一致,限制了機器人整車運動精度的提高。Mecanum輪式全向移動機器人的結構參數精度和四個車輪速度的控制精度對整車的運動精度極為重要。除此之外,要實現機器人的精確運動,還必須建立合理的輥子變形模型,以及輥子與地面摩擦模型,在車輪速度控制算法中合理控制這類不確定誤差,提高Mecanum輪實際轉速的控制精度。
3.4 循跡控制與路徑規劃
由于全向移動機器人能夠原地橫移、原地自轉,它非常適合在工作環境空間狹窄、對機器人的機動性要求高的場合。由于這些場合通常不適合操作人員進入操作,因此全向移動機器人擁有自動導引和軌跡跟蹤的功能是迫切需求。研究全向移動機器人的軌跡跟蹤,一方面要求通過控制算法使得全向移動機器人有精確的循跡和軌跡修正的功能;另一方面需要結合全向移動機器人的運動特性和結構特性,尋求各運動參數、幾何尺寸參數與跟蹤軌跡的特征參數的內在聯系,使得全向移動機器人的循跡效率更高、精度更準。
在實際應用中,機器人所循跡的路徑或軌跡要根據工作需求和環境特點設計。路徑規劃的目的則是根據環境、應用場合、實現目標的不同,在工作環境中優化設計出一條遍歷所有需要停靠的工作點、并且滿足全向移動機器人運動約束條件的軌跡。根據工作任務需要,以最快速度、最節約電能、最短路徑等為目標,規劃出理想的運行路徑,可進一步提高全向移動機器人的運行效率,滿足復雜的工作環境中的自動化搬運與物流應用的各種需求。
4 Mecanum輪全方位移動技術的典型應用
4.1 靈巧搬運
麥克納姆輪式全方位移動機器人國外成功的應用例子有美國Airtrax公司的Mp2搬運車、Sidewinder叉車,德國MIAG公司的飛機引擎就位車、運彈車,德國KUKA公司為空客生產的飛機機身搬運車等產品,圖9—圖13[12-14]。
此外,德國KUKA公司的youBot機器人搭載有五自由度機械臂和二自由度的機械臂,可以完成機械加工工件復雜轉運安裝(圖14)。

圖9 Airtrax Mp2系列搬運車

圖10 Airtrax全向叉車ATX-3000

圖11 MIAG公司的飛機引擎就位儀

圖12 德國MIAG公司生產的彈體搬運裝載車

圖13 空客公司的機身搬運用Mecanum輪車

圖14 德國KUKA公司youBot移動機械臂
4.2 教育與醫療服務機器人
在教育和醫療領域, Mecanum輪用于全向移動輪椅,可以幫助殘疾人提高移動能力(圖15—圖17)[16]。

圖15 全方位移動輪椅

圖16 全方位移動殘疾人車
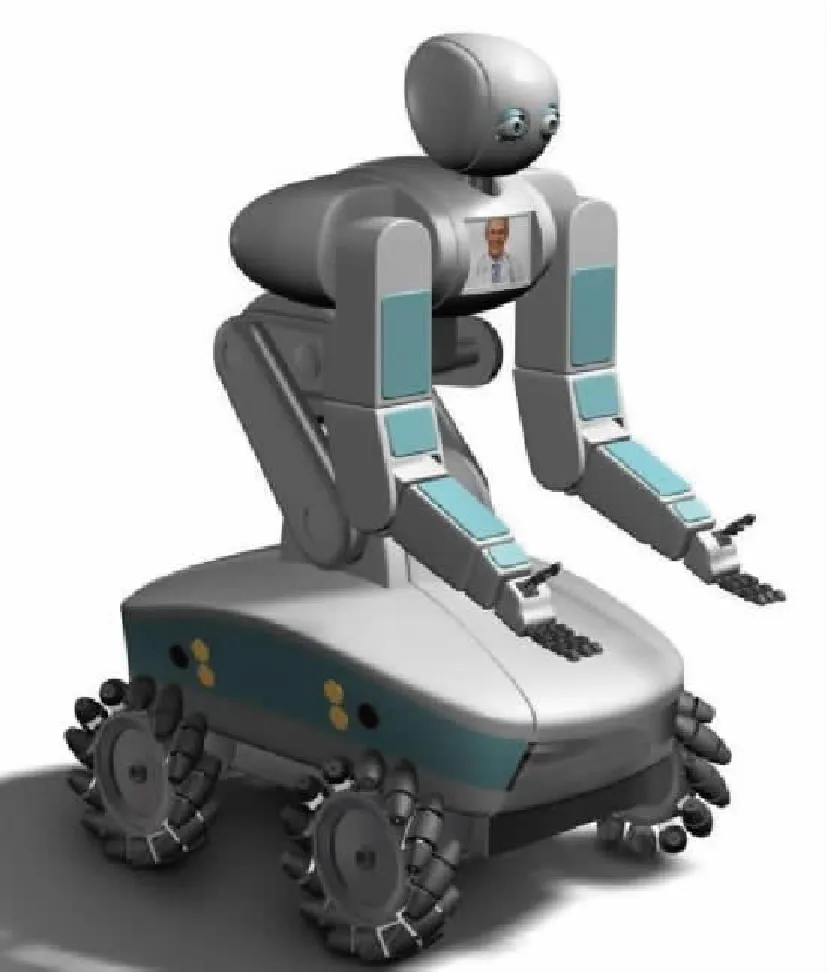
圖17 常州全方位移動概念醫用搬運機器人
Mecanum輪另一個重要應用是Robcup,即機器人世界足球錦標賽。該賽事是一項國際合作項目,主旨即為促進人工智能、機器人和相關領域的發展。機器人足球錦標賽涉及機器人學、人工智能、精密機械、傳感、通訊等諸多領域,是高技術的對抗賽。由于麥克納姆輪式全方位移動機器人轉向時不需要改變自身的姿態下實現任意方向的移動以及以任意半徑轉動,因此麥克納姆輪式全方位移動機器人非常適合于高機動性的場合。全向移動機器人無與倫比的靈活性與機動性,受到了參賽選手的青睞(圖18)。

圖18 全方位移動機器人比賽圖片[17]
4.4 運動靈巧的制造車間AGV系統
自動導航車(Automated Guided Vehicles ,AGV)又名無人搬運車,出現于20世紀50年代,是一種自動無人駕駛的智能化搬運設備[18]。AGV在制造業的應用出現于1973 年,是瑞典的Volvo Kalmar 轎車裝配廠為了提高運輸系統的效率,采用AGV為載運工具的自動轎車裝配線。該裝配線由多臺可裝載轎車車體零部件的AGV系統組成。采用該裝配線后,裝配時間減少了20% ,裝配故障減少了39%,投資回收時間減少了57% ,勞動力減少了5%。目前,AGV在世界的主要汽車廠,如通用、豐田、克萊斯勒、大眾等汽車制造和裝配線上得到了普遍應用。
目前,已經有許多廠家制造的幾百種的承載AGV系統,廣泛運行于倉庫、工廠、車間、醫院及其他許多領域。在郵局、圖書館、車站、碼頭和機場等場合,物品的運送存在著作業量變化大、動態性強、作業流程調整頻繁,以及搬運作業過程單一等特點,AGV的并行作業、自動化、智能化和柔性化的特性能夠很好地滿足這些應用需求。
此外,在軍事以及其他危險場所,以AGV的自動駕駛為基礎集成其他探測和作業設備,可廣泛用于戰場排雷、陣地偵察等危險環境作業,如軍用機器人、危險品處理機器人、鋼鐵爐料運送車、放射性物料搬運車、海底電纜鋪設車等。
目前國際上應用于制造業的AGV系統基本采用普通差動輪驅動,需要較大的運行道路空間。而采用Mecanum輪驅動的AGV,由于其運動靈活性和定位的準確性,可以使車間面積利用率提高20%~30%;由于其可以全方位運動,甚至可以取消傳統AGV上的精確平移機構,直接把工件點對點送到制造裝備的安裝位置(如送入切削機床的夾具上)。因此,可以進一步節約裝夾時間,提高效率,具有更為廣闊的應用前景。
東南大學機械學院與蘇州歐米麥克機器人有限公司合作,在蘇州偉恒模具制造有限公司實施了全方位移動AGV車間物流系統。在模具加工過程中,用AGV全部取代人工,在工序中搬運零件。在加工機床工位建立呼叫基站,需要運走成品轉運盤或送來毛胚轉運盤時,工人通過基站按鍵操作,中心調度計算機系統即可調度AGV連同所需空箱或毛胚箱到達倉位,建立了類似出租車調度系統的車間物流調度系統。調度系統信息采用WIFI通訊,車輛通過視覺導航循跡、RFID定位方式運行。圖19為此項目驗證實施狀態下的Mecanum輪全方位移動AGV。
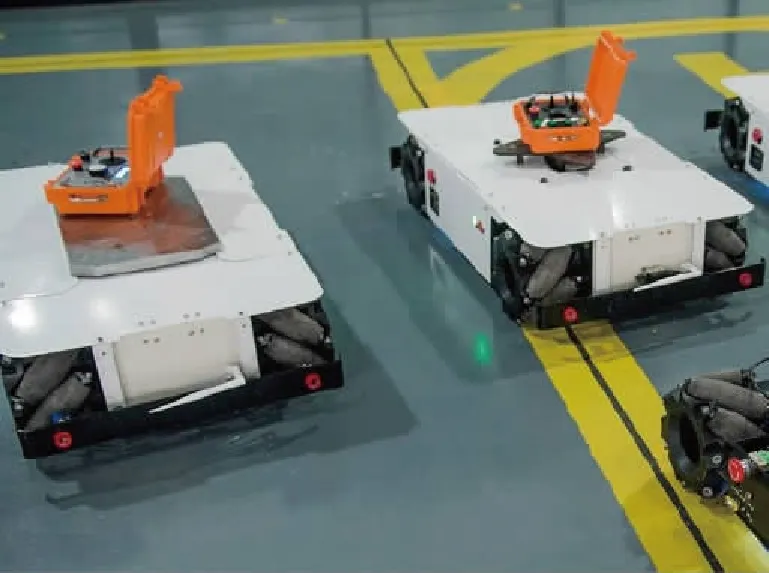
圖19 全方位移動車間物流AGV
[1] 李磊, 葉濤, 譚民,等.移動機器人技術研究現狀與未來[J].機器人, 2003, 24(5):475-480.
[2] 徐國華, 譚民.移動機器人的發展現狀及其趨勢[J].機器人技術與應用,2001(3):1-3.
[3] 趙冬斌, 易建強.全方位移動機器人導論[M].北京:科學出版社, 2010:3-5.
[4] 張毅.移動機器人技術及其應用[M].北京:電子工業出版社, 2007:11-12.
[5] 付宜利, 李寒, 徐賀,等.輪式全方位移動機器人幾種轉向方式的研究[J].制造業自動化, 2005, 27(10): 33-37.
[6] http://www.kaixin001.com/cdstm/photo/view_90956482_939619706_14_0_1338.html#939619706_90956482_0_14.
[7] http://tieba.baidu.com/p/1669701857.
[8] Gferrer A.Geometry and kinematics of the Mecanum wheel[J].Computer Aided Geometric Design, 2008, 25:784-791.
[9] Indiveri G.Swedish Wheeled Omnidirectional Mobile Robots: Kinematics Analysisand Control[J].IEEE Transactions on Robotics, 2009, 25(1): 164-171.
[10] 劉洲, 吳洪濤.Mecanum四輪全方位移動機構運動分析與仿真[J].現代設計與先進 制造技術,2011, 40(5):43-46.
[11] Salih J, Rizon M, Yaacob S, etc.Designing omni-directional mobile robot with mecanum wheel[J].American Journal of Applied Sciences, 2006, 3(5): 1831-1835.
[12] http://www.chinaforklift.com/shop/about.php?id=322.
[13] http://www.handyrobotwh.com/ProductShow.asp?ID=134.
[14] http://www.groundsupportworldwide.com/online/military/04_wint.pdf.
[15] http://www.robotworld.org.tw/index.htm?pid=8&News_ID=552.
[16] Kang J W, Kim B S, Chung M J.Development of omni-directional mobile robots with mecanum wheels assisting the disabled in a factory environment[C].Proceedings of the 2008 International Conference on Control, Automation and Systems, 2008: 2070-2075.
[17] http://www.rcccaa.net/shownews.asp?id=56.
[18] 楊銓.AGV系統[J].工藝裝備,2002(4):52-53.
猜你喜歡
北京航空航天大學學報(2022年6期)2022-07-02 01:59:12
四川輕化工大學學報(自然科學版)(2021年3期)2021-08-30 06:37:02
中國慣性技術學報(2019年3期)2019-10-15 07:21:02
電子測試(2018年15期)2018-09-26 06:01:34
制造技術與機床(2017年3期)2017-06-23 08:11:21
智能系統學報(2015年4期)2015-12-27 09:38:35
機電產品開發與創新(2014年5期)2014-03-11 16:42:32
鄭州大學學報(理學版)(2014年3期)2014-03-01 04:21:09
中國海洋大學學報(自然科學版)(2014年8期)2014-02-28 12:21:31
中國海洋大學學報(自然科學版)(2014年7期)2014-02-28 12:21:19