穿刺手術(shù)機(jī)器人遙操作系統(tǒng)的控制策略研究
2014-08-16 01:08:46張忠林桂林電子科技大學(xué)電子工程與自動(dòng)化學(xué)院廣西桂林541004
網(wǎng)絡(luò)安全與數(shù)據(jù)管理 2014年12期
張忠林,陳 以,俞 益(桂林電子科技大學(xué) 電子工程與自動(dòng)化學(xué)院,廣西 桂林541004)
遙操作穿刺手術(shù)是通過專用手術(shù)器械插入患者體內(nèi),并在醫(yī)學(xué)圖像的引導(dǎo)下,對患者體內(nèi)的病灶進(jìn)行手術(shù)操作的外科手術(shù),具有創(chuàng)傷小、痛苦小、康復(fù)快、術(shù)后并發(fā)癥少等優(yōu)點(diǎn),是當(dāng)前主要發(fā)達(dá)國家競相研究的醫(yī)學(xué)領(lǐng)域之一[1]。目前已有很多較為成熟的醫(yī)療遙操作系統(tǒng),如Computer Motion公司研發(fā)的AESOP腹腔鏡操作機(jī)器人[2]、Zeus微創(chuàng)手術(shù)機(jī)器人系統(tǒng)[3]以及 Intuitive Surgical公司研發(fā)的Da Vinci微創(chuàng)手術(shù)機(jī)器人系統(tǒng)[4]。這些系統(tǒng)不僅為醫(yī)生提供了先進(jìn)的視覺反饋,而且讓手術(shù)醫(yī)生擁有了更加靈活的操作方式,在醫(yī)療手術(shù)機(jī)器人領(lǐng)域具有革命性的意義。
穿刺手術(shù)主從機(jī)器人系統(tǒng)作為一個(gè)擁有主從控制方式的遙操作裝置,近年來,在穿刺手術(shù)機(jī)器人遙操作研究中,其系統(tǒng)結(jié)構(gòu)也從主從同構(gòu)形式發(fā)展成了主從異構(gòu)形式。主從異構(gòu)機(jī)器人實(shí)時(shí)控制需要系統(tǒng)能夠在短時(shí)間內(nèi)完成機(jī)器人的正逆運(yùn)動(dòng)學(xué)計(jì)算、誤差消除、抖動(dòng)消除等。
本文主要針對穿刺手術(shù)遙操作控制策略、抖動(dòng)消除等進(jìn)行了相關(guān)半實(shí)物仿真研究。本文方法的優(yōu)點(diǎn)在于利用較為簡單的控制系統(tǒng)結(jié)構(gòu),獲得較好的控制精度和響應(yīng)速度,并易于在實(shí)驗(yàn)中實(shí)現(xiàn)。
1 遙操作主從機(jī)器人構(gòu)型
穿刺手術(shù)機(jī)器人系統(tǒng)采用主從式控制結(jié)構(gòu),外科醫(yī)生通過操縱主機(jī)器人(主手)來實(shí)現(xiàn)對從機(jī)器人(從手)的控制。本系統(tǒng)的主機(jī)器人采用的是SensAble公司的Phantom Omni[5],具有 6自由度(DOF),所有關(guān)節(jié)都為旋轉(zhuǎn)關(guān)節(jié),前3個(gè)關(guān)節(jié)控制機(jī)器人末端位置,后3個(gè)關(guān)節(jié)以三軸交匯的方式控制機(jī)器人姿態(tài),如圖1(a)所示。另外,本文所有坐標(biāo)均是指在笛卡爾空間下的坐標(biāo)。從機(jī)器人作為穿刺手術(shù)系統(tǒng)的執(zhí)行部分負(fù)責(zé)完成手術(shù)操作,擁有6DOF,且都是旋轉(zhuǎn)關(guān)節(jié),前3個(gè)關(guān)節(jié)配合實(shí)現(xiàn)從機(jī)器人末端定位;后3個(gè)關(guān)節(jié)以三軸交匯的方式實(shí)現(xiàn)末端姿態(tài)調(diào)整,如圖1(b)所示。
2 輔助穿刺遙操作系統(tǒng)
主從控制系統(tǒng)在醫(yī)療機(jī)器人遙操作系統(tǒng)中處于核心的地位,起著協(xié)調(diào)主從手、監(jiān)控手術(shù)對象、為操作者提供手術(shù)操作信息的作用。手術(shù)醫(yī)生通過操作主手、主手的位置和速度信息,通過主從映射傳遞給病灶端的從手,從而實(shí)現(xiàn)主從手的快速、精確跟隨。

圖1 主從機(jī)器人構(gòu)型
主從控制系統(tǒng)框圖如圖 2所示,其中 Xm、Xg分別表示主手和從手末端執(zhí)行器在笛卡爾空間坐標(biāo)中的位置坐標(biāo);X˙m、X˙s分別為主從手末端執(zhí)行器在笛卡爾空間坐標(biāo)中的速度矢量;θs、θ˙s分別表示從手關(guān)節(jié)角度和關(guān)節(jié)角速度矢量;為從手逆雅克比矩陣;k為主從映射比例系數(shù);LPF為低通數(shù)字濾波器。
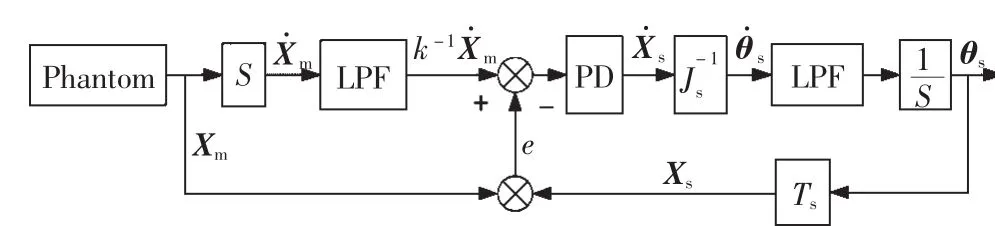
圖2 主從控制系統(tǒng)框圖
2.1 主從控制策略的選取
一般情況下,主從控制方案的選擇與主從手的結(jié)構(gòu)相關(guān)。主從同構(gòu)型的機(jī)器人,主從手關(guān)節(jié)數(shù)目相同且一一對應(yīng),利用簡單的關(guān)節(jié)-關(guān)節(jié)控制就能實(shí)現(xiàn)快速精確的主從控制。然而對于主從異構(gòu)型的機(jī)器人,由于主從手各關(guān)節(jié)不再一一對應(yīng),不能利用關(guān)節(jié)控制來解決,必須引入主從手的運(yùn)動(dòng)學(xué)正、逆運(yùn)算,在笛卡爾空間坐標(biāo)系中建立起映射關(guān)系。
笛卡爾空間坐標(biāo)下的主從控制的關(guān)鍵在于逆運(yùn)動(dòng)學(xué)的求解,逆運(yùn)動(dòng)學(xué)求解有多種方法[6-8],但是這些方法得到的關(guān)節(jié)變量表達(dá)式可能含有超越函數(shù),計(jì)算較為復(fù)雜,且會(huì)產(chǎn)生多個(gè)解,需要對這些解進(jìn)行實(shí)時(shí)最優(yōu)選取,影響了系統(tǒng)的實(shí)時(shí)性。本文基于微分變換的思想,利用逆雅克比矩陣進(jìn)行逆運(yùn)動(dòng)學(xué)求解,得到唯一解,降低了運(yùn)動(dòng)學(xué)計(jì)算量,且實(shí)時(shí)性也得到了提高。
雅克比矩陣能將機(jī)器人關(guān)節(jié)速度與末端在笛卡爾空間的速度聯(lián)系起來,也可稱為機(jī)器人關(guān)節(jié)空間速度向末端笛卡爾空間速度的映射,表示為:

其 中 ,θ˙∈R6×1為 關(guān) 節(jié) 角 速 度 矢 量 ,J(θ)∈R6×6為 雅 克 比矩陣,X˙∈R6×1為末 端速度矢量。
將機(jī)器人末端和關(guān)節(jié)角在微小時(shí)間段內(nèi)的位移△X和△θ分別代替瞬時(shí)末端速度和關(guān)節(jié)速度,則式(1)又可表示為:

由式(2)得出機(jī)器人逆運(yùn)動(dòng)學(xué)問題求解關(guān)系:

其中,J(θ)-1為逆雅克比矩陣。
由式(2)可得到主手末端速度,經(jīng)過主從映射后得到從手末端速度,再根據(jù)式(3)可得穿刺手術(shù)機(jī)器人關(guān)節(jié)速度。然而,由于逆雅克比矩陣是相對于局部空間位置的映射,隨著機(jī)器人在其工作空間的運(yùn)動(dòng),主從跟隨誤差就會(huì)不斷積累,從而降低跟隨精度,導(dǎo)致穿刺手術(shù)失敗。為了消除這種積累誤差,本系統(tǒng)引入了比例微分PD(Proportional_Derivative)反饋控制環(huán)節(jié)。
在PD控制環(huán)節(jié),通過調(diào)節(jié)比例微分系數(shù) kp、kd來使系統(tǒng)能夠迅速地達(dá)到穩(wěn)狀態(tài),最終使得從手末端執(zhí)行器位姿能夠精確、迅速地跟隨主手末端執(zhí)行器位姿坐標(biāo)變化。PD控制律如下:

其中,X˙m、X˙s分別表示主、從手末端執(zhí)行器位姿速度,Xm、Xs分別表示主、從手末端執(zhí)行器位姿。
2.2 主從控制中的抖動(dòng)消除
在手術(shù)過程中醫(yī)生手部難免發(fā)生抖動(dòng),特別是長時(shí)間手術(shù)時(shí)手部抖動(dòng)會(huì)更加顯著。這些無關(guān)抖動(dòng)通過主從映射會(huì)反映到從手的運(yùn)動(dòng)上,進(jìn)而會(huì)影響手術(shù)精度。本系統(tǒng)首先對主手采樣數(shù)據(jù)進(jìn)行一次滑動(dòng)均值濾波,然后再對從手關(guān)節(jié)角度數(shù)據(jù)信息進(jìn)行二次濾波,這樣將有效濾除抖動(dòng)。
滑動(dòng)均值算法對周期性的干擾具有較好的抑制作用,當(dāng)系統(tǒng)在一定時(shí)間內(nèi)進(jìn)行連續(xù)采樣時(shí),每計(jì)算一次測量數(shù)據(jù),只需進(jìn)行一次采樣,從而極大地提高了對測量數(shù)據(jù)的計(jì)算速度,滿足快速控制的實(shí)時(shí)性要求。算法如下:
在第i次采樣周期中,將采樣得到的每一個(gè)離散點(diǎn)在進(jìn)入下一步采樣之前,利用式(5)進(jìn)行計(jì)算,得到均值采樣結(jié)果。

其中,N′i為濾波計(jì)算結(jié)果,n為均值數(shù)字濾波器階數(shù)(i≥n)。
3 半實(shí)物仿真
為了驗(yàn)證本文方法的有效性,利用上述主從控制方案分別進(jìn)行主從跟隨的半實(shí)物仿真實(shí)驗(yàn),實(shí)驗(yàn)是在帶有Phantom工具箱[9]的MATLAB Simulink實(shí)時(shí)仿真環(huán)境下進(jìn)行的。
3.1 反饋消除誤差仿真
圖3所示為引入PD反饋控制環(huán)節(jié)前后主從跟隨誤差效果。從圖中可以看出,引入PD環(huán)節(jié)后的控制系統(tǒng)能夠有效地消除系統(tǒng)積累誤差。
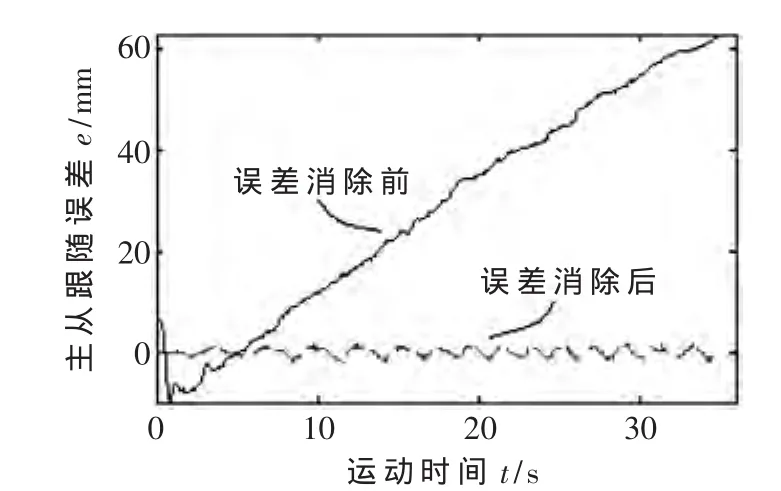
圖3 主從運(yùn)動(dòng)跟隨誤差
3.2 抖動(dòng)消除仿真
進(jìn)行抖動(dòng)濾波時(shí),取n=15,即滑動(dòng)均值濾波器為15階濾波器。圖4所示為從手末端的抖動(dòng)濾波效果圖,圖4(a)表示抖動(dòng)消除前的從手末端在Z軸的位移,可以看出其有較多的抖動(dòng)毛刺;圖4(b)表示經(jīng)過平滑數(shù)字濾波器進(jìn)行抖動(dòng)濾波后的運(yùn)動(dòng)軌跡,可以看出其運(yùn)動(dòng)曲線毛刺明顯減少,即外科醫(yī)生手部的無關(guān)抖動(dòng)得到了顯著消除。
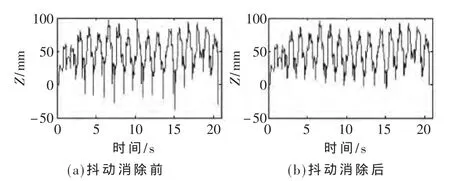
圖4 從手末端抖動(dòng)消除前后效果圖
3.3 主從跟隨控制仿真
在進(jìn)行主從跟隨半實(shí)物仿真時(shí),設(shè)定主從映射比例k=1,即從手運(yùn)動(dòng)軌跡完全一樣。通過對PD控制參數(shù)的調(diào)節(jié),當(dāng) kp=0.3、kd=0.001時(shí),能得到較好的跟隨效果,結(jié)果如圖 5所示(由于在 X、Y、Z方向的主從手情況類似,故只給出在X方向的跟隨情況)。此外在實(shí)驗(yàn)剛開始的幾秒鐘里,先緩慢地操縱主手,大概13 s后再加快主手運(yùn)動(dòng)速度。
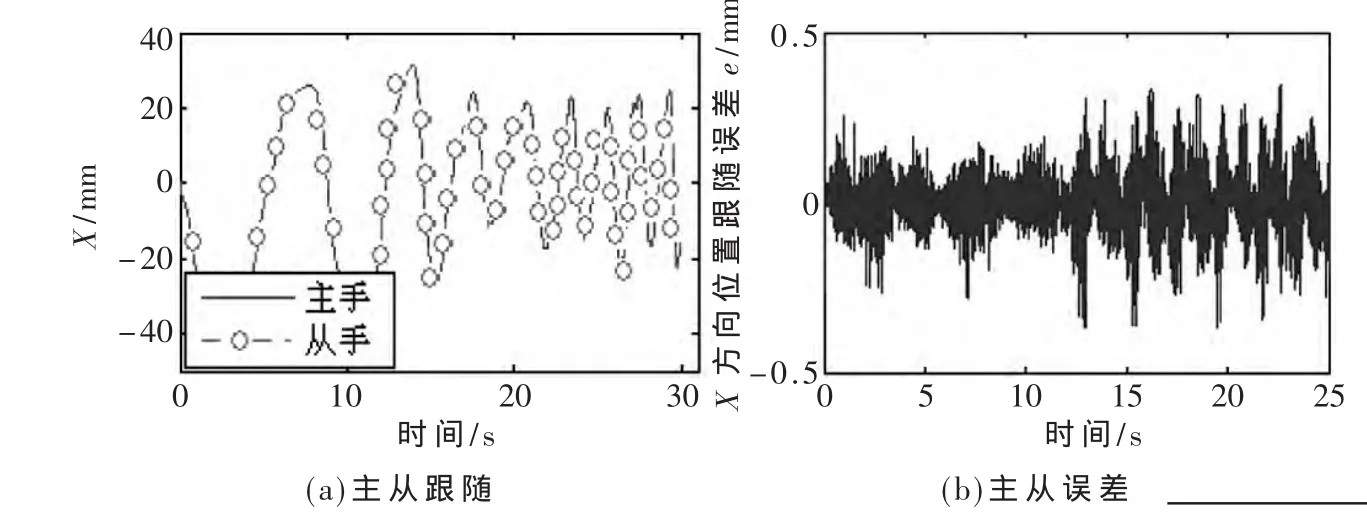
圖5 主從位置跟隨和跟隨誤差圖
從圖5(a)可以看出,無論主手運(yùn)動(dòng)速度快慢,從手都能夠平穩(wěn)、快速、精確地跟隨主手運(yùn)動(dòng)。從圖5(b)可以看出,主從手跟隨誤差不超過0.5 mm,說明了本系統(tǒng)控制算法的合理性。
為了滿足穿刺手術(shù)機(jī)器人主從運(yùn)動(dòng)控制的精確、快速及穩(wěn)定性,本文提出了基于雅克比矩陣和PD控制律的主從控制算法,半實(shí)物仿真結(jié)果驗(yàn)證了算法的可行性,基本能夠滿足穿刺手術(shù)任務(wù)的要求。本文研究只涉及運(yùn)動(dòng)學(xué)方面,并沒有虛擬力反饋和動(dòng)力學(xué)方面的研究,下一步工作是進(jìn)行虛擬向?qū)Ш蛣?dòng)力學(xué)方面的研究。
[1]KAZANZIDES P,F(xiàn)ICHTINGER G,HAGER G D,et a1.Surgical and interventional robotics-core concepts,technology,and design[J].IEEE Robotics and Automation Magazine,2008,15(2):122-130.
[2]SHEW S B,OSTLIE D J,HOLCOMB G W.Robotic telescopic assistance in pediatric laparoscopic surgery[J].Pediatric Endosurgery and Innovative Techniques,2003,7(4):371-376.
[3]LANFRANCO A R,CASTELLANOS A E,DESAI J P,et al.Robotic surgery-a current perspective[J].Annals of Surgery,2004,239(1):14-21.
[4]BROEDERS I,RUURDA J.Robotics revolutionizing surgery:the intuitive surgical “Da Vinci” system[J].Industrial Robot,2001,28(5):387-391.
[5]SANSANAYUTH J,NILKHAMHANG I,TUNGPIMOLRAT K.Teleoperation with inverse dynamics control for Phantom Omni haptic device[C].SICE Annual Conference,Akita University,Akita,Japan,2012:2121-2126.
[6]PIEPER D L.The kinematics of manipulators under computer control[D].Stanford,USA:Stanford University,1968.
[7]LEE C S G,ZIEGLER M.A geometric approach in solving the inverse kinematics of PUMA robots[J].IEEE Transactions on Aerospace and Electronic Systems,1984,20(6):695-706.
[8]PAUL R P,SHIMANO B,MAYER G E.Kinematic control equations for simple manipulators[J].IEEE Transactions on Systems,Man,and Cybernetics,1981,11(6):449-455.
[9]MOHAMMADI A,TACAKOLI M,JAZAYERI A.Phantsim:a simulink toolkit for the sensable Phantom haptic devices[C].Proceedings of the 23rd CANCAM,Canada,2011:787-790.
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
昆明醫(yī)科大學(xué)學(xué)報(bào)(2021年2期)2021-03-29 07:42:46
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
河北畫報(bào)(2020年10期)2020-11-26 07:20:50
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
中國衛(wèi)生標(biāo)準(zhǔn)管理(2015年3期)2016-01-14 03:41:47
西南軍醫(yī)(2014年5期)2014-04-25 07:42:48