地面三維激光掃描數據配準方法
2014-08-15 03:13:06陳良良隋立春黃維臣
測繪通報 2014年5期
陳良良,隋立春,蔣 濤,薛 勇,黃維臣
(1. 長安大學 地質工程與測繪學院,陜西 西安 710054; 2. 北京則泰集團,北京 100107)
一、引 言
地面三維激光掃描技術作為近年來逐漸發展起來的一項新技術,以其所具有的快速、非接觸、高密度、高精度等獨特優勢[1-2],在城市三維建模、復雜工業設備測量、建筑與文物保護、地形測量、變形測量等領域都得到了較好的應用。
在實際測量中,所掃描的物體都具有三維空間特征,而由于光的直線傳播特性及遮擋物的存在,要獲得待掃描物體完整的表面特征,需要掃描儀能夠進行多站位多視角掃描,獲取待掃描物體的分站點云數據,然后將分站掃描數據進行拼接,從而得到待掃描物體的整體三維點云信息,為后續物體表面三維建模等提供數據基礎。
二、地面三維激光掃描原理
三維激光掃描儀根據測距原理的不同可分為脈沖式三維激光掃描儀和相位式三維激光掃描儀。目前使用較多的是脈沖式掃描儀,其掃描的原理是根據測量激光束從發射到返回所用的時間得到距離觀測值S,由精密時鐘控制編碼器保證激光掃描儀能同步測量出橫向掃描角度觀測值α和縱向掃描角度觀測值θ[3]。
激光掃描系統一般使用的是儀器自定義的坐標系:X軸在橫向掃描面內,Y軸在橫向掃描面內與X軸垂直,Z軸與橫向掃描面垂直,如圖1所示。則可得目標物表面激光角點的坐標公式為

由于掃描儀在測量時每一站都有儀器自定義的坐標系,點云的配準實質上就是進行坐標系的旋轉和平移,使得位于不同坐標系中的點云統一到同一個坐標系中,即要使第i站掃描的點云坐標(Xi,Yi,Zi)經過旋轉和平移轉換為統一坐標系中的坐標(XC,YC,ZC)。
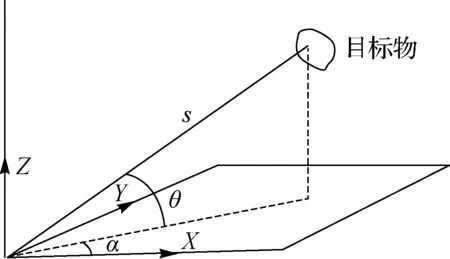
圖1

上式是一個非線性方程,至少需要3個公共點方可求得式中的6個參數,從而完成坐標系的轉換。
三、地面三維激光掃描數據配準
由式(2)可知,要實現兩個坐標系的統一,即完成掃描數據的配準,關鍵是要找出兩分站之間的公共點。掃描數據的配準就是把不同視點的數據統一到一個坐標系下面,使之成為一個整體[4]。掃描數據的配準方法依據不同的分類標準有不同的分類方法[5],其中根據配準時所采用的基元可以將點云數據的配準分為兩大類:依據特征的配準和無特征的配準。
1. 依據特征的配準
依據特征的配準是指找出待配準的點云中的一些明顯的特征點,利用這些同名特征點解算點云配準參數。依據特征的配準根據所采用的特征不同,又可分為幾種不同的配準方法。
(1) 標靶配準
該方法是利用一些特制的標靶作為同名特征點進行配準,特制的標靶主要有球標靶和平面標靶。掃描時,可以將這些標靶放置在掃描區域的適當位置,同時保證相鄰掃描站都能掃描到3個以上的公共標靶,采用適當的掃描密度,對關注的物體進行掃描。
內業數據處理時,將分站點云導入掃描儀配套的軟件中,采用人機交互的方式,由軟件自動提取單站中標靶的中心位置(作為特征點),然后由操作者對其進行命名,保證相同的特征點具有相同的名字。然后自動解算配準參數,對點云數據進行配準。圖2是四、五兩單站的數據,圖3是利用Cyclone軟件采用標靶拼接得到的某寺廟第四、五兩站點云配準圖。
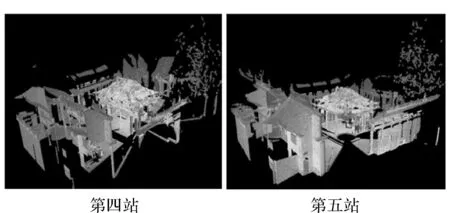
圖2 四、五兩單站點云數據

圖3 四、五兩站點云配準圖
經實踐證明采用標靶中心點作為特征點進行配準,其精度是較高的,單點誤差可達到1 mm,可見當進行高精度的點云配準時,標靶法是比較理想的方法。
(2) 無標靶的特征配準
這種配準方法與標靶配準的原理是一樣的,但是在掃描區域內不放置標靶。內業進行數據的配準時,人工選取兩分站中公共區域的特征點進行命名,這些點最好能選擇一些易于識別且具有良好特征的點,如墻角點、點云數據較完整的臺階邊上的點、宣傳標語的字等,然后由軟件來解算配準參數并配準。
由于三維激光掃描不同于傳統的單點測量,無法對某一特定點進行有目的的掃描以獲取其精確的三維坐標[6]。而且掃描儀進行掃描時,在同一掃描線內及相鄰掃描線之間都以一定的間隔進行數據采集,同時由于激光束的發散使得落到物體表面的掃描光斑也不是一個點,使得選取的同名特征點其實并非真實的同名點,再加上人為選取的誤差,使得單純在點云中人工選取同名特征點進行配準精度較低,且效率不高。
(3) 混合配準法
由于在掃描現場不可能完全做到相鄰站之間有3個以上的公共標靶特征點,尤其對于一些現場環境較復雜的掃描區域,要擺放滿足數量且位置合適的標靶需要耗費很多的時間。此時,通常在外業放置一定數量的標靶,而在內業進行數據配準時通常將標靶配準和無標靶的特征配準結合起來。當標靶數量不能滿足結算要求時,就人工選取一些特征點,以滿足配準參數結算的要求。這種方法在實際的點云配準中是很常用的,而且實踐證明其精度也能達到要求。
2. 無特征的配準
相對于特征配準而言,無特征的配準在掃描之前不在掃描區域內設置標靶,內業數據處理時也不采用人工選取同名特征點的方法進行配準。它是采用一定的算法,利用原始點云通過迭代計算從而完成點云數據的配準。無特征配準所采用的最基本的算法是由Bsel和Mckay提出的ICP算法[7],即迭代最近點算法。
ICP算法的基本思想是設定兩個數據集P和Q,以P作為數據體,Q作為模型體。其中要求P中的數據都以離散點形式存在,而對于Q的數據存在形式無要求。對P中的每一個離散點,在Q中搜索其對應最近點,組成最近點對,以這些點對計算旋轉矩陣和平移矢量,將P中的點在旋轉矩陣和平移矢量的作用下進行變換,得到各點經過一次變換的坐標,同時建立點對的誤差函數,然后繼續進行迭代計算,直至相鄰兩次迭代計算的誤差值小于設定的閾值,則迭代計算終止。
傳統ICP算法雖然能夠解決拼接問題,但它只適用于存在明確對應關系的點集之間的拼接,而且由于每次迭代都需要計算目標點集中的每個點在參考點集中的對應點,故效率較低[8]。后來學者對ICP算法進行了一些改進[9-10],取得了不錯的結果。
現行的地面三維激光掃描后處理軟件都具有利用算法進行配準的功能,以Cyclone軟件為例,進行配準時,只需在具有公共掃描區域的兩幅點云中的公共區域按照一定的準則選取至少三對點,相當于給定迭代計算的初始值,然后軟件就可自動進行迭代計算,從而對點云進行配準。圖4是利用Cyclone軟件采用無特征配準方法得到的第四、五兩站配準后的圖形。
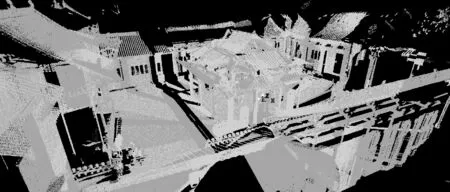
圖4 四、五兩站點云配準圖
經實踐證明,利用無特征配準方法進行點云配準是比較方便的,外業無需放置標靶,可以減少外業工作量,但其配準精度較標靶配準較低。
四、結束語
通過對地面三維激光掃描各種配準方法進行分析比較,同時結合實際經驗,可以得到利用標靶進行配準的方法是精度較高的,對于一些小場景如古建筑的掃描等采用標靶法進行配準是可取的。對于一些大場景的掃描區域(如地形掃描),由于外業放置大量的標靶是不實際的,同時標靶在內業數據處理時也不好尋找,因此常采用無特征的配準方法。在實際工作中,還應根據掃描區域的狀況及工程所要求的精度,進行前期整體的規劃,從而在后期內業數據處理時可以采用適當的方法進行點云數據的配準。
參考文獻:
[1] 馬立廣.地面三維激光掃描測量技術研究[D].武漢:武漢大學,2005.
[2] 張凱.三維激光掃描數據的空間配準研究[D].南京:南京師范大學,2008.
[3] 劉春,陳華云,吳杭彬.激光三維遙感的數據處理與特征提取[M].北京:科學出版社,2009:21-23.
[4] 丁延輝.地面三維激光數據配準研究[J].測繪通報,2009(2):57-59.
[5] 周華偉.地面三維激光掃描點云數據處理與模型構建[D].昆明:昆明理工大學,2011.
[6] 朱凌.地面三維激光掃描標靶研究[J].激光雜志,2008,29(1):33-35.
[7] BESL P J,MCKAY N D.A Method for Registration of 3-D Shapes[J].IEEE Transactions on Pattern Analysis and Machine Intelligence,1992,14(2):239-256.
[8] 張成國.逆向工程中數據拼接與精簡技術研究[D].青島:中國海洋大學,2005.
[9] 蔡潤彬,潘國榮.三維激光掃描多視點云拼接新方法[J].同濟大學學報:自然科學版,2006,34(7):913-918.
[10] ROTH G. Registering Two Overlapping Range Images[C]∥Proceedings of the Second International Conference on Recent Advances in 3-D Digital Imaging and Modeling(3DIM'99). Ottawa:[s.n.],1999:191-200.
猜你喜歡
瘋狂英語·新策略(2019年10期)2019-12-13 08:43:28
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
當代陜西(2019年10期)2019-06-03 10:12:04
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通·3-4年級(2017年9期)2017-10-13 08:10:54
Coco薇(2016年2期)2016-03-22 02:42:52
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年4期)2015-05-19 14:47:56