制漿造紙廢水pH值測試控制系統(tǒng)的應(yīng)用
2014-08-10 02:50:40湯瑜杰
中國造紙 2014年10期
關(guān)鍵詞:系統(tǒng)
胡 勇 湯瑜杰 陸 偉
(1.無錫榮成紙業(yè)有限公司,江蘇無錫,214187;2.浙江景興紙業(yè)有限公司,浙江平湖,314214)
浙江景興紙業(yè)股份有限公司 (以下簡稱景興紙業(yè))為保證生產(chǎn)過程中廢水處理能力達到環(huán)保局排放要求,從2010年下半年就開始籌備對原有廢水系統(tǒng)的改造升級。現(xiàn)就改造過程中對pH值的控制系統(tǒng)做一個分析。實際上,廢水處理的中和過程具有較高的控制難度[1],有以下2方面的原因:①中和反應(yīng)存在嚴重的非線性,中和點附近增益極高,難以建立過程的辨識數(shù)學(xué)模型;②中和過程為弱酸和中強堿在露天流動的過程中反應(yīng),其過程易受本身化學(xué)成分、是否含雜質(zhì)、外界溫度變化等影響。所以采用常規(guī)PID[2]對pH值進行精確控制難以取得很好的控制效果,這也成為工業(yè)自動化中較薄弱的環(huán)節(jié)之一。為此,pH值被公認為是最難控制的變量之一[3]。與常規(guī)PID控制方法相比,模糊自適應(yīng)PID控制具有不建立數(shù)學(xué)模型、響應(yīng)快、超調(diào)小、較好的動態(tài)響應(yīng)品質(zhì)和魯棒性好的特點。本文將模糊自適應(yīng)PID算法與西門子S7-300結(jié)合,實現(xiàn)對IC厭氧反應(yīng)塔內(nèi)部的pH值控制,達到滿意的效果。
1 廢水處理IC厭氧反應(yīng)塔工作原理
為了保證IC厭氧反應(yīng)塔中厭氧污泥的反應(yīng)環(huán)境,需要酸堿適中。在IC厭氧反應(yīng)塔入口和出口都有一個pH值變送器,通過檢測出口的pH值來保證IC厭氧反應(yīng)塔內(nèi)部的反應(yīng)環(huán)境。根據(jù)工藝需要,IC厭氧反應(yīng)塔內(nèi)部污泥的最佳反應(yīng)環(huán)境為弱酸性,當(dāng)pH值>7時,自動啟動酸計量泵;當(dāng)pH值<7時,自動啟動堿計量泵,以維持pH值為弱酸性,廢水處理流程如圖1所示。模糊控制器輸出的控制量信號作用于相應(yīng)的執(zhí)行器,可實現(xiàn)不同類型廢水的中和處理。
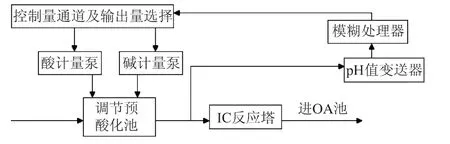
圖1 廢水處理流程圖
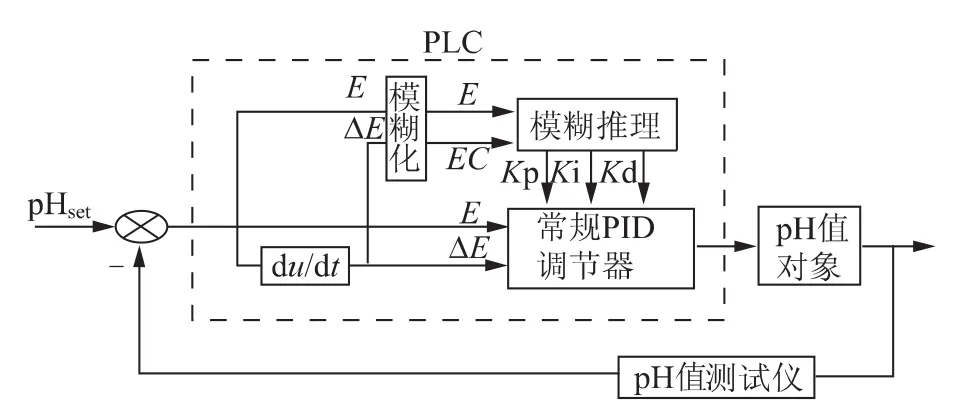
圖2 模糊自整定PID控制器結(jié)構(gòu)
2 模糊自適應(yīng)PID控制器工作原理及設(shè)計[4-6]
2.1 pH值模糊PID控制原理
在普通PID控制器上加入模糊控制環(huán)節(jié),通過模糊規(guī)則調(diào)整系統(tǒng)的PID參數(shù),構(gòu)成模糊PID控制器,實現(xiàn)對Kp、Ki、Kd自動調(diào)節(jié)。
自適應(yīng)PID控制器以偏差E和偏差變化EC作為輸入,可以滿足不同時刻的E和EC對PID參數(shù)自整定的要求。利用模糊控制規(guī)則在線對PID參數(shù)進行修改,便構(gòu)成了模糊PID控制器。控制原理如圖2所示。
控制器的輸入為偏差E和偏差變化率△E,輸出為Kp、Ki、Kd,分別為比例參數(shù)、積分參數(shù)和微分參數(shù)。經(jīng)過適應(yīng)于控制對象的模糊推理獲得作為PID的Kp、Ki、Kd,從而根據(jù)被控對象狀態(tài)實現(xiàn)對PID參數(shù)的實時自動調(diào)節(jié)。
2.2 pH值模糊控制器的設(shè)計
偏差E和偏差變化率△E為該控制器輸入量,偏差E=pHsample(n)-pHset,其中pHsample(n)為以T作為采樣周期,nT時刻采樣得到的pH值;pHset為IC厭氧反應(yīng)塔的標準pH值,為了方便研究,這里設(shè)定pHset=7。所以在該模糊PID控制器中,偏差E的范圍為[-7,7],偏差變化率△E的范圍為 [-7,7]。根據(jù)映射關(guān)系,將偏差E和偏差變化率△E分別模糊化為E和EC,模糊論域均為[-3,3],Kp、Ki、Kd的模糊論域也分別為 [-3,3]。模糊子集均記為{NB、NM、NS、Z0、PS、PM、PB},分別表示負大、負中、負小、零、正小、正中、正大。E、EC和Kp、Ki、Kd的隸屬函數(shù)均取為三角形,如圖3和圖4所示,該函數(shù)具有計算復(fù)雜性低、控制精度高等特點。
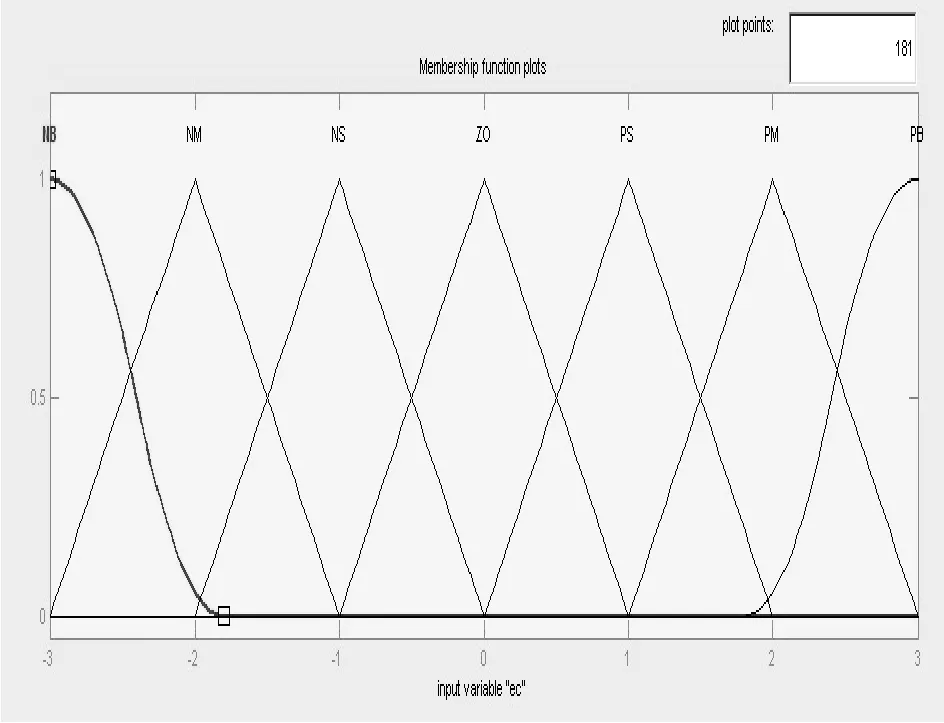
圖3 E、EC隸屬函數(shù)曲線
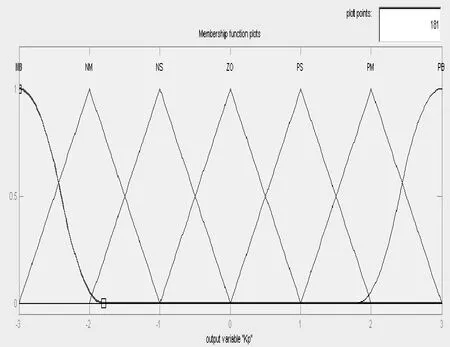
圖4 Kp、Ki、Kd隸屬函數(shù)曲線
通過分析,在不同的E和EC時,模糊PID參數(shù)自整定遵循以下原則[7]:
(1)當(dāng)偏差E較大時,說明實際值與設(shè)定值相差很大,為了加快系統(tǒng)的響應(yīng)速度,應(yīng)取較大的Kp;同時為了避免由于開始時誤差的瞬時變大可能出現(xiàn)的微分過飽和,而使控制作用超出許可的范圍,應(yīng)取較小的Kd;同時為了防止系統(tǒng)響應(yīng)出現(xiàn)較大的超調(diào),產(chǎn)生積分飽和,應(yīng)對積分作用加以限制,所以通常取Ki值趨近于零。
(2)當(dāng)E和EC處于中間值時,Kp應(yīng)取得小一些,Ki的取值要適當(dāng),可以使系統(tǒng)響應(yīng)具有較小的超調(diào);這種情況下,Kd的值對系統(tǒng)影響較大,取值可根據(jù)E和EC的值來確定,大小要適中,以保證系統(tǒng)的響應(yīng)速度。
(3)當(dāng)偏差E較小或接近于設(shè)定值時,主要考慮避免系統(tǒng)在設(shè)定值附近出現(xiàn)振蕩,同時根據(jù)偏差E接近設(shè)定值的程度,應(yīng)適當(dāng)增加Kp、Ki的值,使系統(tǒng)有良好的穩(wěn)態(tài)特性;并考慮到系統(tǒng)的抗干擾性能,根據(jù)偏差EC的取值來確定Kd的取值,當(dāng)EC的值變化小時Kd的值大些,當(dāng)EC的值變化大時Kd的值小些。
基于上述控制規(guī)則,為了便于在線調(diào)整,將E和EC整數(shù)論域[-3,3]中的全部元素進行任意組合,結(jié)合工程技術(shù)知識和實際操作經(jīng)驗,通過模糊推理和模糊判決得出它們對應(yīng)的Kp、Ki和Kd的值,建立符合控制對象pH值特點的模糊控制查詢表,如表1~表3所示。
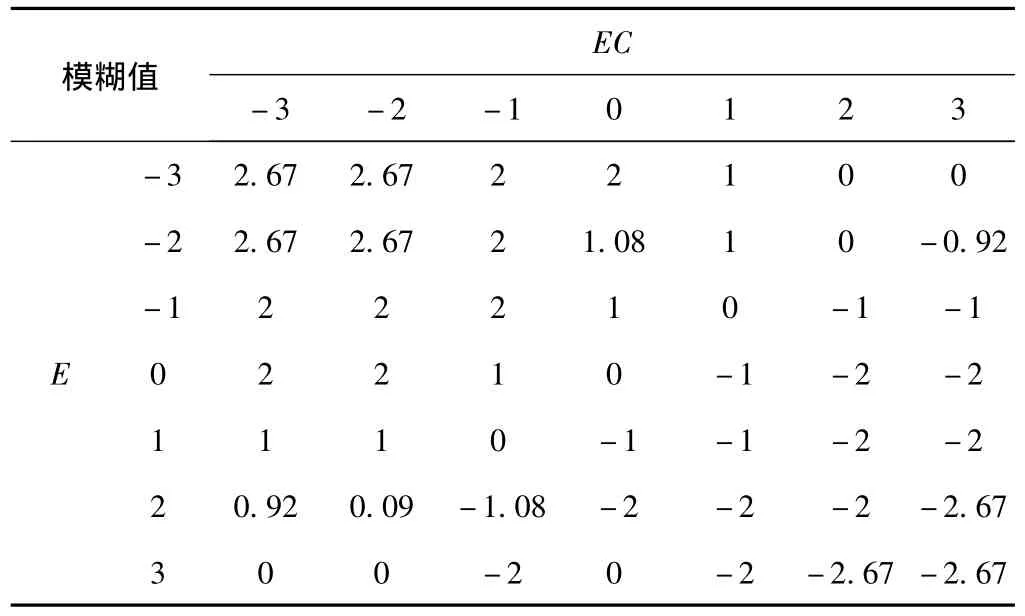
表1 Kp模糊控制查詢表
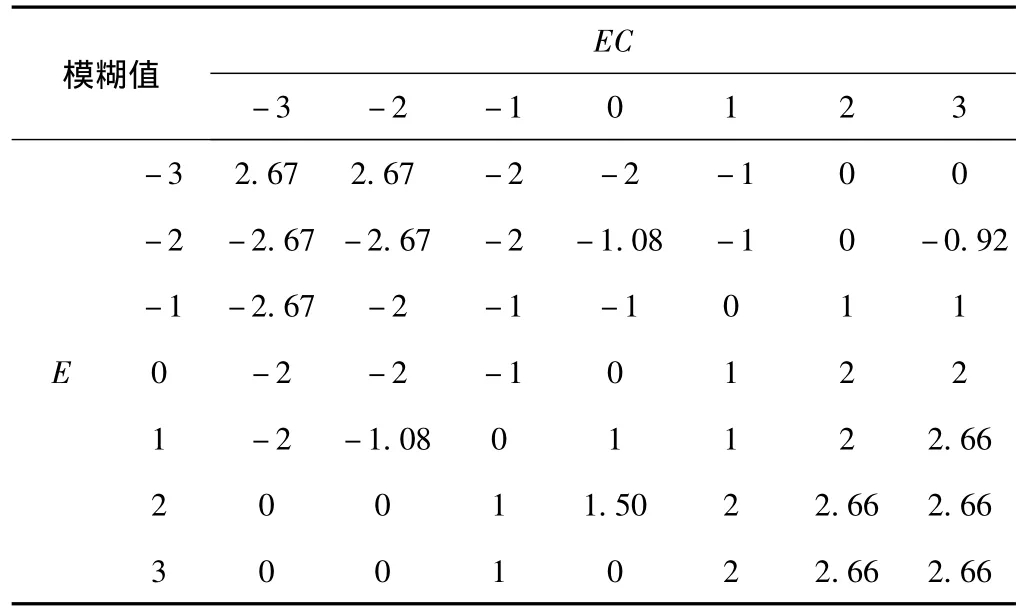
表2 Ki模糊控制查詢表
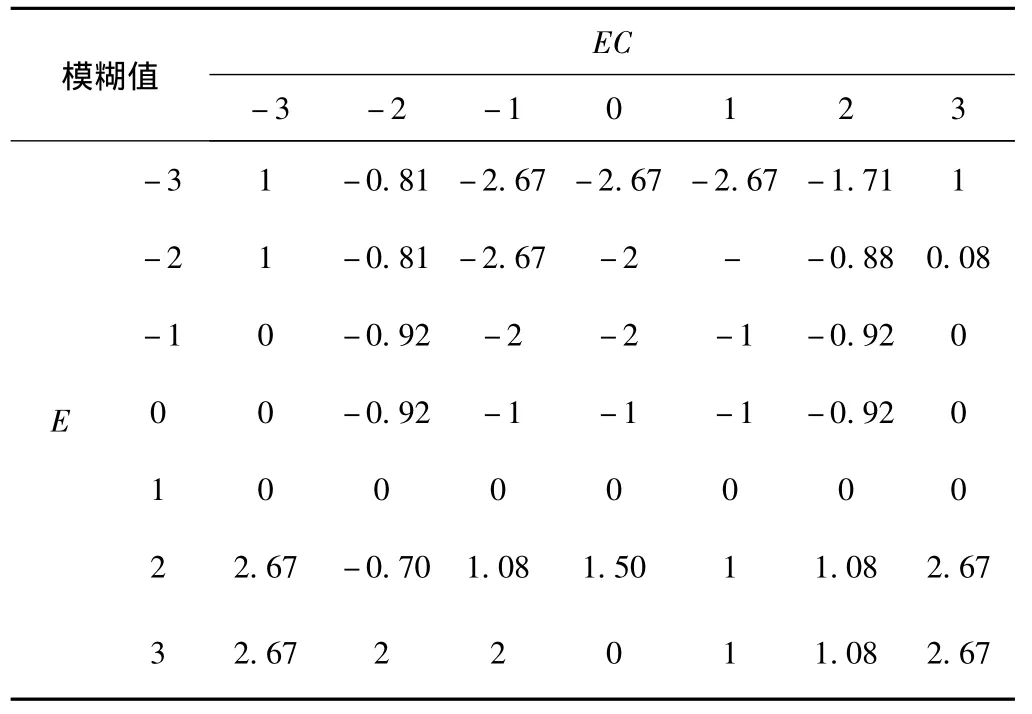
表3 Kd模糊控制查詢表
3 控制方案的實現(xiàn)[8-10]
景興紙業(yè)廢水改造系統(tǒng)采用S7-300系統(tǒng),因為S7-300穩(wěn)定可靠、功能強大且自動化程度高。改造系統(tǒng)配置為:中央處理模塊 (CPU)CPU315-2DP;數(shù)字量輸入模塊 (DI)SM321,6塊;數(shù)字量輸出模塊 (DO)SM322,2塊;模擬量輸入模塊 (AI)SM331,10塊 (8×12位);模擬量輸出模塊 (AO)SM332,4塊 (8×12位);電源模塊選用 PS307,5 A,24 VDC;為了保證系統(tǒng)穩(wěn)定和實時性,新系統(tǒng)使用以太網(wǎng)通信,型號為SM343-1,并與原有老系統(tǒng)保持通信,實現(xiàn)數(shù)據(jù)交換,整個網(wǎng)絡(luò)采用TCP/IP通信協(xié)議。上位機采用WinCC6.2系統(tǒng),用于調(diào)節(jié)并監(jiān)控現(xiàn)場各參數(shù),實現(xiàn)人機交互,系統(tǒng)運行中相應(yīng)監(jiān)控畫面在上位機上顯示。
整個程序的編寫由STEP7來完成,程序采用模塊化編程,模糊推理子程序根據(jù)采集的數(shù)據(jù)進行模糊推理,模糊推理子程序見圖5。隨后調(diào)用變頻PID控制子程序,在程序中調(diào)用FB41功能塊,并設(shè)置其相關(guān)參數(shù),實現(xiàn)對過程變量的PID調(diào)節(jié),即可實現(xiàn)對酸、堿計量泵變頻器的控制,從而實現(xiàn)對IC厭氧反應(yīng)塔的環(huán)境控制。
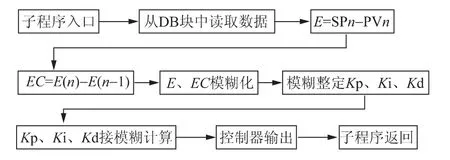
圖5 模糊推理子程序
由前面可知,將模糊論域E的元素 {-3,-2,-1,0,1,2,3}轉(zhuǎn)換為 {0,1,2,3,4,5,6}以便于尋址查詢,然后采用“基址+變址”的尋址方式將模糊控制量表1、表2、表3中的PID控制結(jié)果按從上到下、從左到右的順序填入PLC的數(shù)據(jù)寄存區(qū)DB1.0~DB1.192,DB2.0~DB2.192,DB3.0~DB3.192中。控制量的基址為0,其偏移地址為0+EC*7+E。PID三個參數(shù)的尋址分別找到后,經(jīng)過解模糊運算,可得到精確的控制量Kp、Ki和Kd。在OB1中編寫程序?qū)崿F(xiàn)信號輸入采樣,得到誤差和誤差變化率,在循環(huán)中斷組織塊 OB35中調(diào)用 FB41“CONT_C”[11]實現(xiàn)PID閉環(huán)控制,查表程序分別在FB1、FB2、FB3中進行實現(xiàn),查詢表存放在數(shù)據(jù)塊DB1、DB2、DB3中以供查詢。
4 試驗結(jié)果
根據(jù)以上模糊自適應(yīng)PID控制方案,在廢水pH值穩(wěn)定的情況下,采用常規(guī)PID控制和模糊自適應(yīng)PID控制進行比較:對IC厭氧反應(yīng)塔入口處pH值進行檢測,設(shè)定pH值=7,完成PLC的內(nèi)部運行程序之后,采用常規(guī)PID控制曲線使用模糊自適應(yīng)PID的方法,曲線如圖6所示。
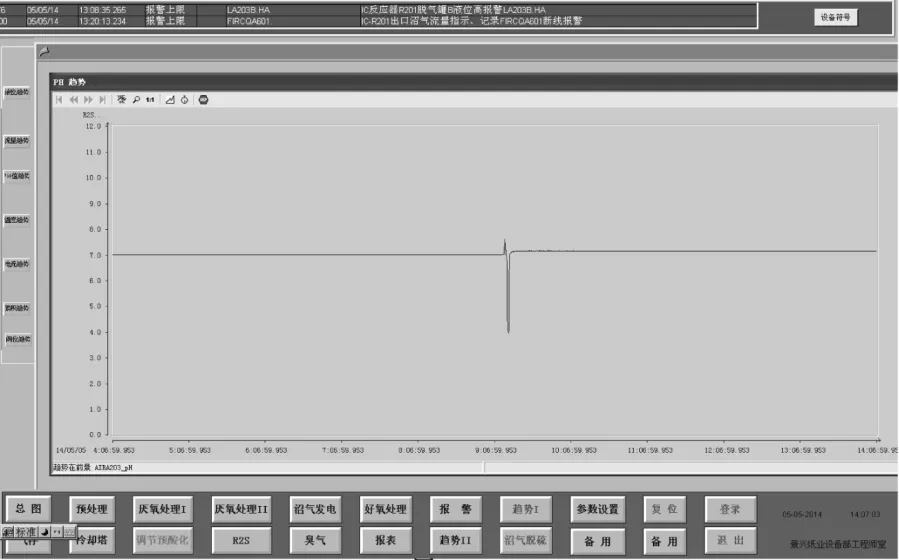
圖6 常規(guī)PID控制曲線
從圖6可以看出,當(dāng)系統(tǒng)突然出現(xiàn)一個比較大的擾動時,所監(jiān)控pH值同樣會出現(xiàn)一個突然下降很大的波動,沒有很好的響應(yīng)調(diào)節(jié),抗干擾能力不足,很容易引起超調(diào)現(xiàn)象發(fā)生。
使用模糊自適應(yīng)PID的方法,曲線如圖7所示。
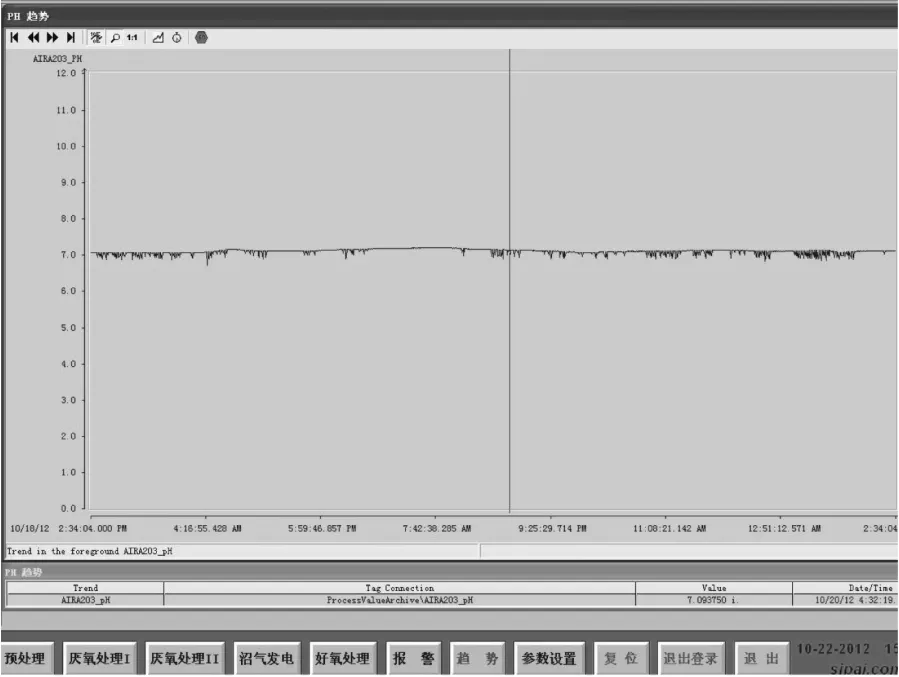
圖7 模糊自適應(yīng)PID控制曲線
圖7中曲線為設(shè)定pH值=7時的自動調(diào)節(jié)響應(yīng)曲線,從圖7的曲線可以看出,系統(tǒng)因采用自適應(yīng)調(diào)節(jié),降低了超調(diào)量,響應(yīng)速度加快,對參數(shù)變化不敏感,基本穩(wěn)定在設(shè)定值附近,保證穩(wěn)態(tài)特性又改善了動態(tài)性能。
5 結(jié)語
針對常規(guī)PID控制參數(shù)難以整定且不能靈活變化,對高階、時變、非線性系統(tǒng)控制效果不理想的狀況,設(shè)計了一種基于模糊自適應(yīng)PID控制方法的廢水處理pH值控制系統(tǒng),對現(xiàn)有設(shè)備低成本條件下的技術(shù)改造很有意義。同時此種方法也能用到車間中其他一些復(fù)雜系統(tǒng)的備選方案中,產(chǎn)生可觀的經(jīng)濟效益。
[1] ZHAO Yu-nan.Characteristics and Treatment of Pulping& Papermaking Effluent[J].China Pulp & Paper,2010,29(9):41.趙宇男.制漿造紙廢水特性及處理的相關(guān)問題[J].中國造紙,2010,29(9):41.
[2] Wang Shuqing.Advanced control technology and its applications[M].Beijing:Chemical Industry Press,2005.王樹青.先進控制技術(shù)及其應(yīng)用[M].北京:化學(xué)工業(yè)出版社,2005.
[3] Shang Jiandong.Expert intelligent pH controller and its application[J].Chemical Automation and Instrument,1998,25(3):46.商建東.專家智能pH控制器及其應(yīng)用[J].化工自動化及儀表,1998,25(3):46.
[4] Tao Yonghua.New type of PID control and its application[M].Beijing:China Machine Press,1998.陶永華.新型 PID控制及應(yīng)用[M].北京:機械工業(yè)出版社,1998.
[5] Liu Jinkun.Advanced PID control the matlab simulation[M].Beijing:Electronic Industry Press,2003.劉金錕.先進PID控制MATLAB仿真[M].北京:電子工業(yè)出版社,2003.
[6] Song Qing.Fuzzy PID algorithm in urban effluent treatment based on PLC control system applied research[D].Guilin:Guilin University of Technology,2011.宋 青.基于PLC的模糊PID算法在城市廢水處理控制系統(tǒng)的應(yīng)用研究[D].桂林:桂林理工大學(xué),2011.
[7] Xi Aimin.Fuzzy control technology[M].Xi'an:Xi'an University of Electronic Science and Technology Press,2008.席愛民.模糊控制技術(shù)[M].西安:西安電子科技大學(xué)出版社,2008.
[8] Ceng Yanfei,Yu Shouyi.The realization of the adjustable parameter fuzzy control based on PLC[J].Journal of Guangdong Polytechnic Normal University,2005(6):9.曾燕飛,喻壽益.基于PLC的可調(diào)參數(shù)模糊控制的實現(xiàn)[J].廣東技術(shù)師范學(xué)院學(xué)報,2005(6):9.
[9] Qu Feng,Xu Zhonghong.Fuzzy control based on Siemens S7-300 PLC[J].Journal of Nanjing Normal University,2007(12):23.瞿 楓,徐中宏.基于西門子S7-300 PLC的模糊控制實現(xiàn)[J].南京師范大學(xué)學(xué)報,2007(12):23.
[10] User's manual.Used for S7-300 and S7-400 standard software PID control[S].Siemens(China)Co.,Ltd.用戶手冊.用于S7-300和S7-400的標準軟件PID控制[S].西門子(中國)有限公司. CPP
猜你喜歡
工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
制造技術(shù)與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
知識經(jīng)濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(shù)(2016年6期)2016-04-20 06:21:32
