基于LMI的撓性航天器抗飽和補(bǔ)償器設(shè)計(jì)及分析*
2014-08-09 22:11:48王明釗劉金琨
航天控制 2014年1期
關(guān)鍵詞:系統(tǒng)設(shè)計(jì)
王明釗 劉金琨
北京航空航天大學(xué)自動化科學(xué)與電氣工程學(xué)院,北京 100191
?
基于LMI的撓性航天器抗飽和補(bǔ)償器設(shè)計(jì)及分析*
王明釗 劉金琨
北京航空航天大學(xué)自動化科學(xué)與電氣工程學(xué)院,北京 100191

針對撓性航天器中輸入受限問題,設(shè)計(jì)了基于LMI的抗飽和補(bǔ)償器。理想情況下,撓性航天器采用LQG控制,保持系統(tǒng)閉環(huán)穩(wěn)定;輸入受限時,在不改變系統(tǒng)原有結(jié)構(gòu)的前提下,設(shè)計(jì)基于LMI的抗飽和補(bǔ)償器。抗飽和補(bǔ)償器為靜態(tài)補(bǔ)償器,所以不增加系統(tǒng)階數(shù);它不僅保證系統(tǒng)能夠閉環(huán)穩(wěn)定,還能保證系統(tǒng)滿足最優(yōu)的L2指標(biāo)。仿真表明,在理想情況和受限情況下,抗飽和補(bǔ)償器均能保證系統(tǒng)閉環(huán)穩(wěn)定,并且具有良好的魯棒性。
輸入受限;LMI;抗飽和;撓性航天器;補(bǔ)償器
隨著空間技術(shù)的不斷發(fā)展與航天需求的不斷增長,航天器的結(jié)構(gòu)越來越復(fù)雜,尺寸也越來越大,但由于發(fā)射成本及運(yùn)載能力限制的原因,航天器的重量成為一個嚴(yán)格的約束條件。在航天器姿態(tài)控制方面,飛輪等執(zhí)行機(jī)構(gòu)由于上述限制,只能提供有限的控制力矩,這就容易產(chǎn)生輸入受限問題。該問題在某種程度上將影響航天器姿態(tài)控制精度,甚至使整個姿態(tài)控制系統(tǒng)不穩(wěn)定。
近年來,國內(nèi)外的學(xué)者對撓性航天器的抗飽和問題進(jìn)行了深入研究,線性矩陣不等式(Linear Matrix Inequalities,簡稱LMI)作為一種有效的數(shù)學(xué)工具,被廣泛應(yīng)用于抗飽和控制領(lǐng)域中。文獻(xiàn)[1]基于線性矩陣不等式法(LMI),針對線性系統(tǒng)提出了一種改進(jìn)的抗積分飽和控制器來實(shí)現(xiàn)系統(tǒng)的穩(wěn)定控制;文獻(xiàn)[2]針對線性系統(tǒng)利用LIM方法設(shè)計(jì)補(bǔ)償器,實(shí)現(xiàn)系統(tǒng)抗飽和目標(biāo)。Mulder等[3]針對動態(tài)控制器,設(shè)計(jì)了靜態(tài)補(bǔ)償器,保證了系統(tǒng)全局穩(wěn)定,并且降低了系統(tǒng)的L2增益。Grimm等[4]針對一般情況下的穩(wěn)定模型系統(tǒng)設(shè)計(jì)了基于LMI的動態(tài)補(bǔ)償器,保證系統(tǒng)穩(wěn)定,并保證系統(tǒng)輸出對外部干擾具有L2增益。Hu等[5-6]針對一般系統(tǒng)研究了L2增益的特性以及穩(wěn)定區(qū)域。隨后,Hu等[7]針對更普遍的穩(wěn)定系統(tǒng)進(jìn)行了補(bǔ)償器的設(shè)計(jì),并且對穩(wěn)定區(qū)域和非線性性能指標(biāo)進(jìn)行了討論。Hencey等[8-10]利用LMI區(qū)域法研究了抗飽和中D穩(wěn)定問題。
針對撓性航天器中存在的輸入受限問題,本文設(shè)計(jì)了基于LMI的抗飽和補(bǔ)償器,保證了系統(tǒng)在輸入受限情況下的閉環(huán)穩(wěn)定。同時補(bǔ)償器是靜態(tài)的,沒有增加系統(tǒng)的階數(shù)。
1 撓性航天器控制系統(tǒng)描述
撓性航天器姿態(tài)角理想控制系統(tǒng)如圖1所示。
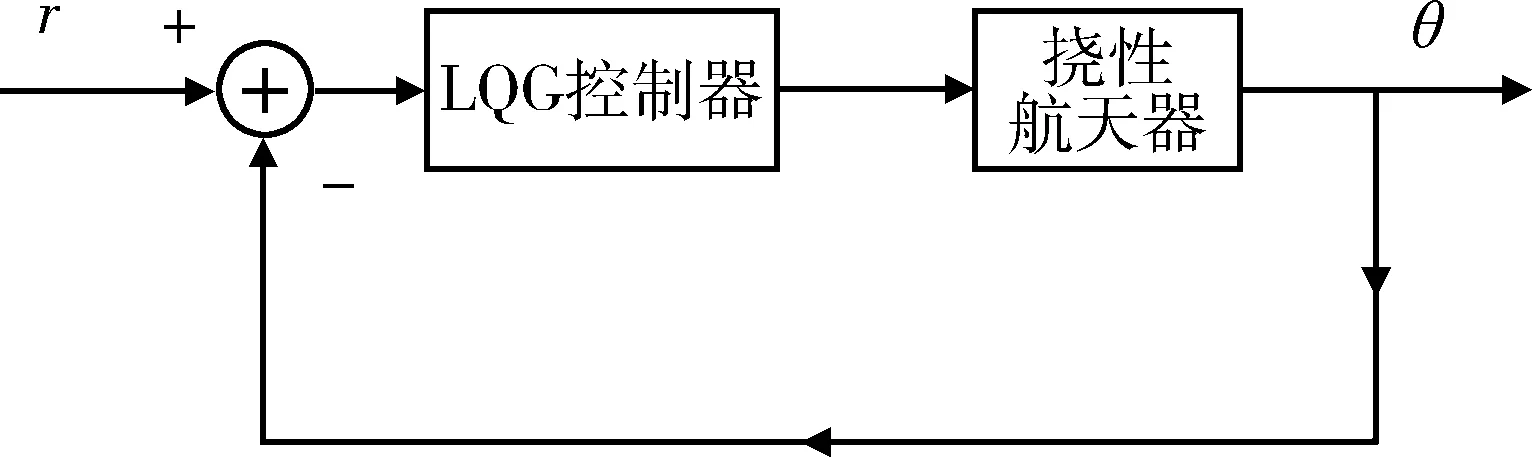
圖1 撓性航天器理想控制系統(tǒng)圖
撓性航天器的簡化模型如下所示:
(1)

為了便于設(shè)計(jì)LQG控制器和補(bǔ)償器,將式(1)寫成狀態(tài)方程、輸出方程、誤差方程標(biāo)準(zhǔn)形式:
(2)
根據(jù)式(2)設(shè)計(jì)撓性航天器的LQG控制器如下所示:
(3)
(4)
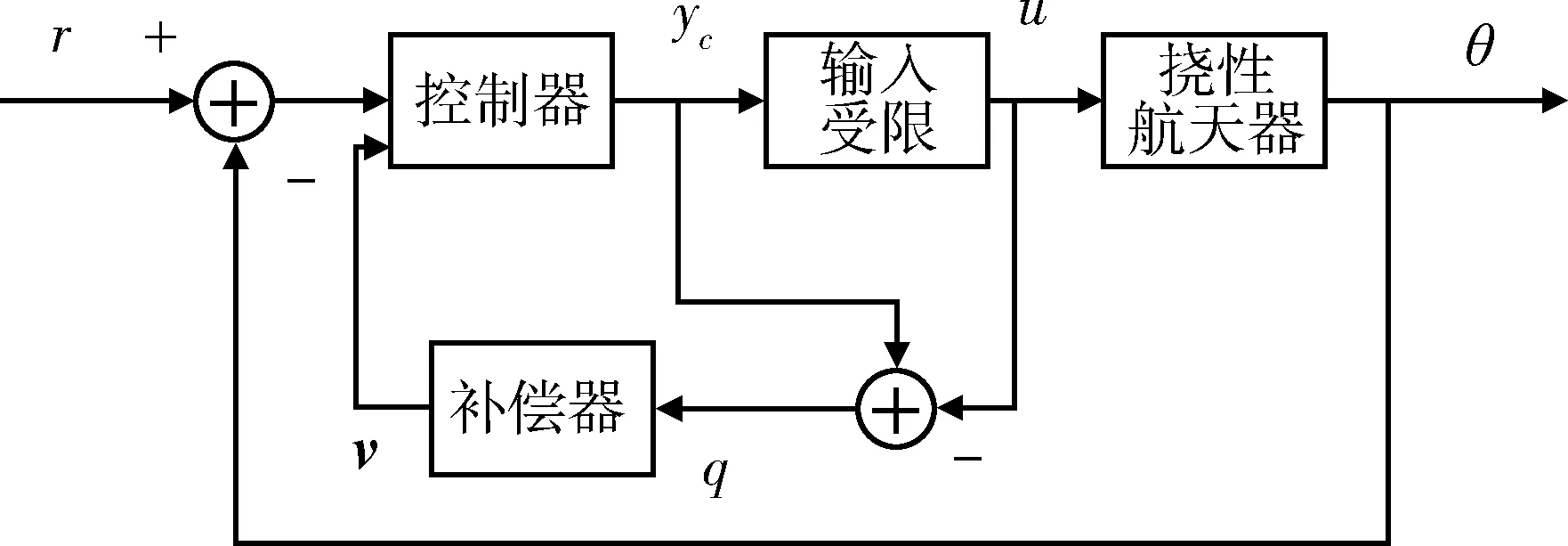
圖2 撓性航天器輸入受限控制系統(tǒng)
圖2中受限系統(tǒng)的控制器如下所示:
(5)
2 基于LMI的補(bǔ)償器設(shè)計(jì)
為了保證撓性航天器姿態(tài)角輸入受限控制系統(tǒng)的穩(wěn)定性,設(shè)計(jì)補(bǔ)償器如下:
(6)
其中,q=yc-u。系統(tǒng)可表示成如下標(biāo)準(zhǔn)形式:
(7)

在本節(jié)中,將采用線性矩陣不等式(LMI)方法,證明存在補(bǔ)償器,保證輸入受限系統(tǒng)穩(wěn)定。把補(bǔ)償器(6)代入標(biāo)準(zhǔn)狀態(tài)方程(7)中可得:
2.1 定義及引理
為了證明存在式(6)的補(bǔ)償器,保證撓性航天器受限控制系統(tǒng)穩(wěn)定,需要用到以下的定義和引理[6,11]。
定義1:設(shè)X為方形矩陣,則HeX:=X+XT。
引理1:對于系統(tǒng)(7),設(shè)矩陣Q∈Rn×n,Q=QT>0。
設(shè)γ>0,s>0。如果存在矩陣Y∈Rnu×n和對角矩陣U>0,滿足以下條件:
(8)
(9)

(10)
2.2 補(bǔ)償器設(shè)計(jì)及存在性證明
根據(jù)下面的設(shè)計(jì)方法,利用MATLAB中的LMI工具箱,可以獲得抗飽和補(bǔ)償器式(6)。
(1)解不等式
利用MATLAB中的LMI工具箱,解下列不等式,得到解(R,Z,γ2)。其中,
(11)
(12)
(13)
(14)
(2)LMI求解補(bǔ)償器
令m=n+nu+nr+nz,構(gòu)造矩陣H∈Rnv×m,ΨR∈Rm×m和GU∈Rnu×m如下所示:
然后求解不等式:
(15)
其中,ΛU∈R(naw+nv)×(naw+nu),對角矩陣U∈Rnu×nu,U>0為不等式的未知變量。最后即可獲得抗飽和補(bǔ)償器:
Daw=AUU-1
(16)

證明:根據(jù)設(shè)計(jì)方法中的第(1)步,LMI的解(R,Z,γ2)令式(12)成立。根據(jù)文獻(xiàn)[4]的方法,構(gòu)造一個特殊矩陣WH如下:
其中,WH的列向量分別為H零空間基向量組成,分塊矩陣的前3×3塊為(np+nw+nz)×n維。經(jīng)過計(jì)算,式(12)可以寫成如下形式:
令P=R-1,根據(jù)文獻(xiàn)[4]方法可得:
根據(jù)文獻(xiàn)[4]中的定理5,式(11)成立,當(dāng)且僅當(dāng)
同時成立。所以第(1)步中式(11)~(14)的解(R,Z,γ2)保證了式(15)必然有解。令Q=R,則式(9)與(15)相同,所以式(9)成立。

令Q=R,根據(jù)Schur補(bǔ)的性質(zhì),可以得到式(8)。
所以根據(jù)引理1,補(bǔ)償器式(6)存在,且滿足定理1的結(jié)論。
注:當(dāng)模型(1)含有虛軸上的極點(diǎn),且其余極點(diǎn)均在左半平面時,不等式(11)~(13)有解(R,Z,γ2)。由于系統(tǒng)是閉環(huán)指數(shù)穩(wěn)定的,選擇R=
RT>0滿足

(17)
因此,對于任意s>0,可以選擇足夠大的R11滿足式(17)及下式
當(dāng)R11和Z滿足上述條件時,總是能選擇足夠大的γ同時滿足式(12)和(13)。
3 仿真結(jié)果

補(bǔ)償器Daw如式(19)所示。此時閉環(huán)系統(tǒng)的有限L2增益為γ=1.9421。仿真結(jié)果如圖3和4所示。
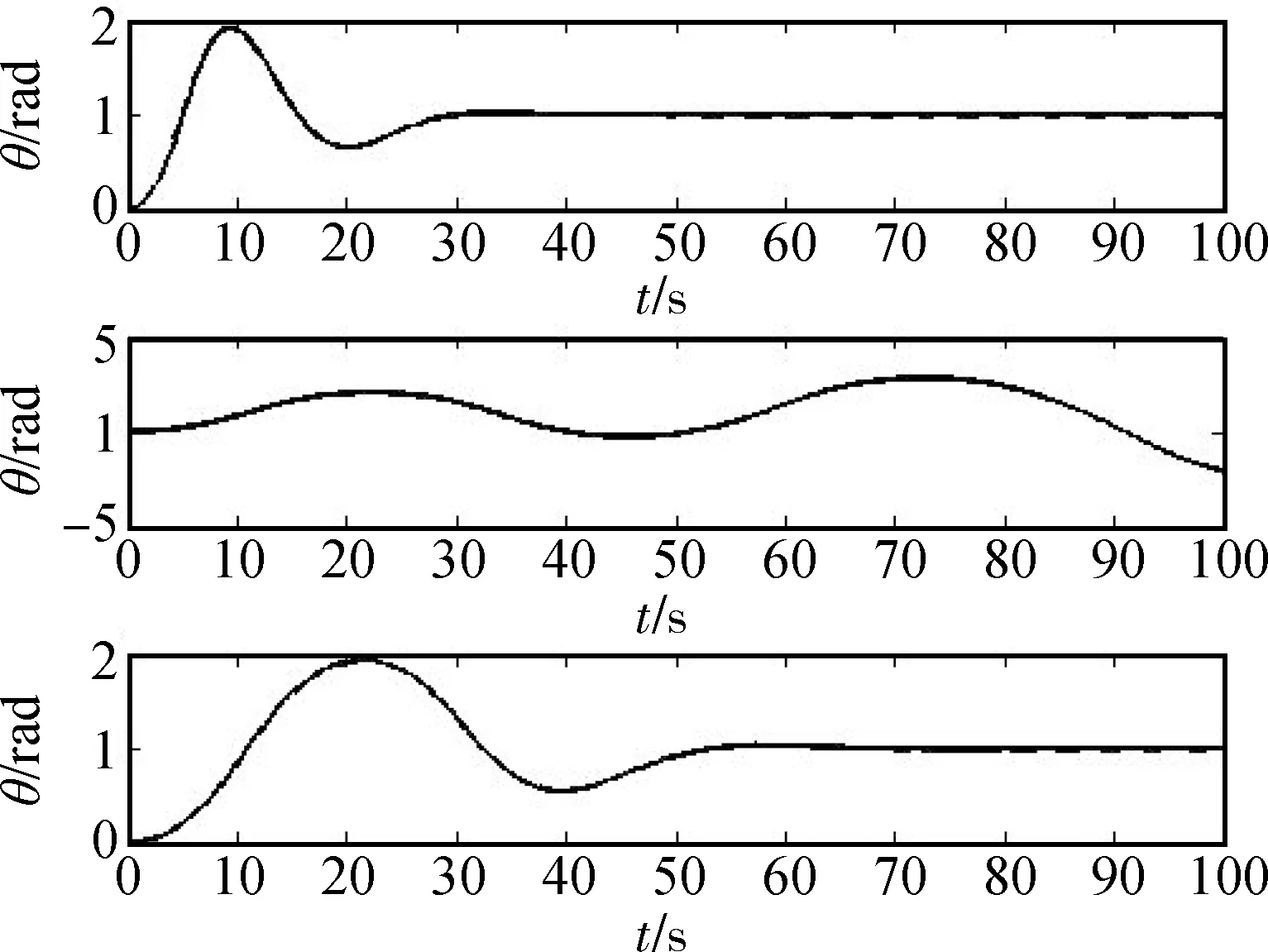
圖3 撓性航天器姿態(tài)角輸出(理想系統(tǒng)、輸入受限系統(tǒng)、加入補(bǔ)償器的受限系統(tǒng))
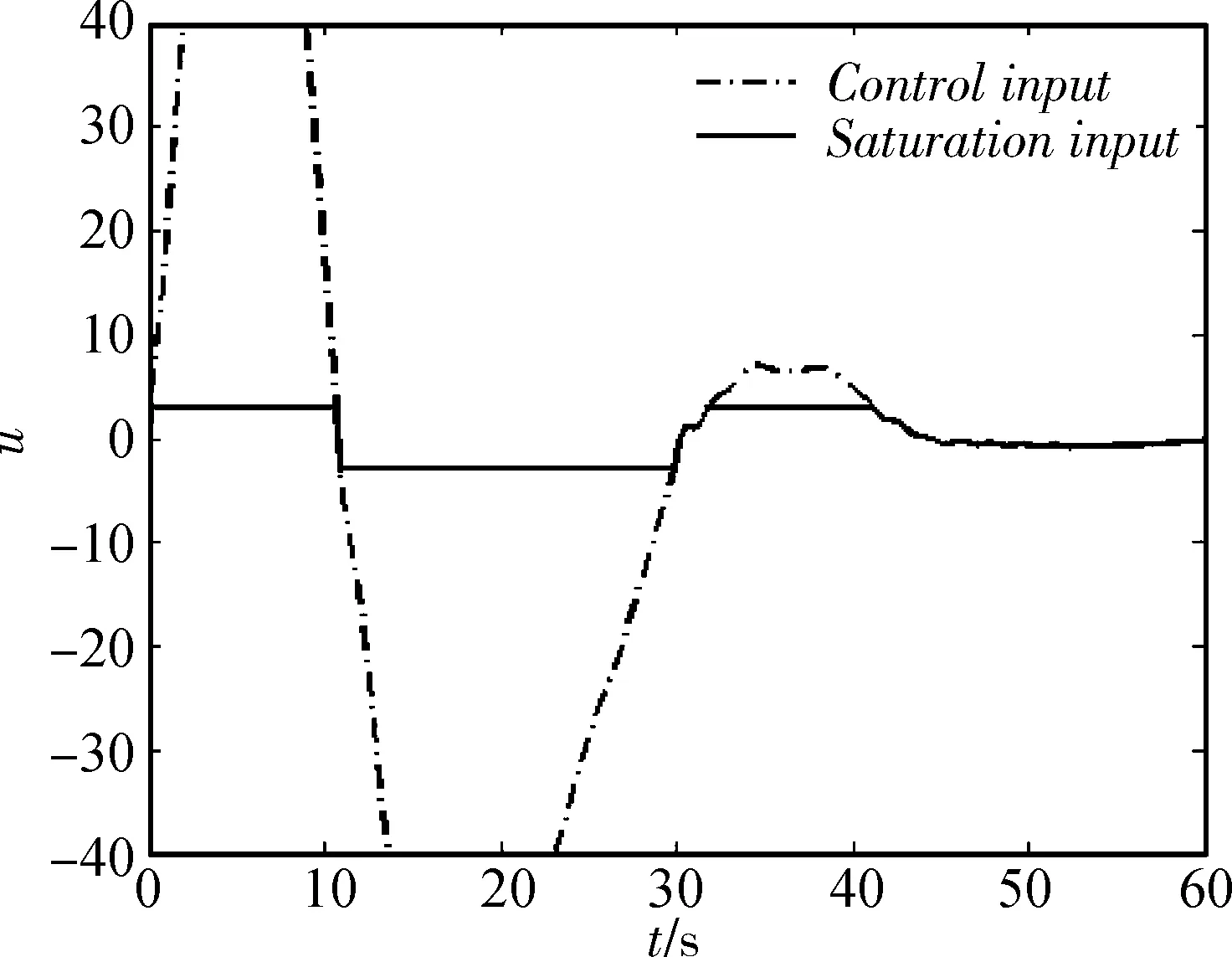
圖4 LMI補(bǔ)償器系統(tǒng)控制器輸出及受限輸出
根據(jù)圖3,理想情況下,LQG能夠保證系統(tǒng)的穩(wěn)定性;存在輸入受限時,系統(tǒng)無法保持穩(wěn)定;加入LMI補(bǔ)償器時,即使在受限情況下,系統(tǒng)仍能保持穩(wěn)定。圖4顯示了理想情況下與受限情況下的控制信號變化情況。
4 結(jié)論
針對撓性航天器姿態(tài)角控制系統(tǒng),設(shè)計(jì)了基于LMI的抗飽和補(bǔ)償器。靜態(tài)補(bǔ)償器的設(shè)計(jì),不僅沒有增加系統(tǒng)固有階數(shù),還能保證系統(tǒng)在輸入受限情況下的穩(wěn)定。仿真結(jié)果表明,系統(tǒng)在輸入受限情況下,抗飽和補(bǔ)償器能夠保證系統(tǒng)閉環(huán)穩(wěn)定。
(18)
(19)
[1] Boyd S,Ghaoul L E, Feron E. Linear Matrix Inequalities in System and Control Theory[M]. Society for Industrial Mathematics, 1994.
[2] Miyamoto S,Vinnicombe G.Robust Control of Plants with Saturation Nonlinearity Based on Coprime Factor Representation[C].36thCDC.Kobe,Japan.1996:2838-2840.
[3] Mulder E,Kothare M,Morari M.Multivariable Anti-windup Controller Synthesis Using Linear Matrix Inequalities[J].Automatica,2001,37(9):1407-1416.
[4] Grimm G, Hatfield J, Postlethwaite I, Teel A, Turner M, Zaccarian L. Antiwindup for Stable Linear Systems with Input Saturation:An LMI-based Synthesis[J].IEEE Transactions on Automatic Control , 2003,48(9): 1509-1525.
[5] Hu T, Teel A, Zaccarian L.Nonlinear L2 Gain and Regional Analysis for Linear Systems with Anti-windup Compensation[C].American Control Conference,Portland (OR),USA.2005:3391-3396.
[6] Hu T,Teel A,Zaccarian L.Stability and Performance for Saturated Systems via Quadratic and Non-quadratic Lyapunov Functions[J].IEEE Transactions on Automatic Control , 2006,51(11): 1770-1786.
[7] Hu T,Teel A, Zaccarian L.Anti-windup Synthesis for Linear Control Systems with Input Saturation: Achieving Regional,Nonlinear Performance[J].Automatica, 2008,44: 512-519.
[8] Hencey B,Alleyne A.A Static Anti-Windup Compensator Design Technique for Robust Regional Pole Placement[C]. ASME International Mechanical Engineering Congress and Exposition Conference, 2006.
[9] Hencey B,Alleyne A.A KYP Lemma for LMI Regions[J].IEEE Transactions on Automatic Control, 2007, 52 (10): 1926-1930.
[10] Hencey B,Alleyne A.An Anti-Windup Technique for LMI Regions[J]. Automatica,2009,45: 2344-2349.
[11] Gomes da Silva J M,Jr.,Tarbouriech S.Anti-windup Design with Guaranteed Regions of Stability: An LMI-Based Approach[J].IEEE Transactions on Automatic Control, 2005, 50(1): 106-111.
The Anti-windup Compensator Design and Analysis for the Flexible Spacecraft Based on the LMI Method
WANG Mingzhao LIU Jinkun
Beihang University, School of Mechanical Engineering & Automation, Beijing 100191,China
Ananti-windupcompensatorbasedonthelinearmatrixinequalities(LMI)isdesignfortheinputsaturationincontrollingtheflexiblespacecraft.TheLQGcontrollercanguaranteethestabilityoftheclose-loopsystemintheidealconditionbutintheinputsaturationcondition.Therefore,thecompensatorbasedontheLMIisdesigned.Thecompensator,whichisstatewithoutincreasingthesystemorder,canguaranteeboththestabilityoftheclose-loopsystemandtheoptimalL2performanceofthesystem.Thesimulationresultsshowthatthecompensatorcanguaranteetheclose-loopstabilityandrobustnessnotonlyintheidealconditionbutalsointheinputsaturationcondition.
Inputsaturation; LMI;Anti-windup;Flexiblespacecraft;Compensator
*國家自然科學(xué)基金項(xiàng)目(61374048);高效博士點(diǎn)基金項(xiàng)目(20121102110008)
2013-06-08
王明釗(1989-),男,山東人,碩士,主要研究方向?yàn)楹教炱骺癸柡涂刂频龋粍⒔痃?1965-),男,遼寧人,教授,主要研究方向?yàn)榛?刂坪妥赃m應(yīng)控制等。
TP273
A
1006-3242(2014)01-0063-05
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
現(xiàn)代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
藝術(shù)啟蒙(2018年7期)2018-08-23 09:14:18
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
海峽姐妹(2017年7期)2017-07-31 19:08:17
