神經(jīng)網(wǎng)絡(luò)在無刷直流電機(jī)控制系統(tǒng)中的應(yīng)用
2014-08-08 09:02:44程聲烽程小華
電機(jī)與控制應(yīng)用 2014年4期
程聲烽, 程小華
(華南理工大學(xué) 電力學(xué)院,廣東 廣州 510640)
0 引 言
無刷直流電機(jī)(Brushless Direct Current Motor, BLDCM)以其體積小、效率高、維護(hù)方便、勵(lì)磁損耗無及調(diào)速性能好等優(yōu)點(diǎn)被廣泛應(yīng)用于伺服系統(tǒng)、數(shù)控機(jī)床、醫(yī)療機(jī)械、航天航空及軍事工業(yè)等領(lǐng)域[1-3]。神經(jīng)網(wǎng)絡(luò)是由眾多簡單的神經(jīng)元連接而成,通過模擬人腦細(xì)胞的分布式工作特點(diǎn)和自組織功能實(shí)現(xiàn)并行處理、自學(xué)習(xí)和非線性映射等功能。由于能逼近任意非線性函數(shù),可自學(xué)習(xí)以適應(yīng)環(huán)境變化等特點(diǎn),神經(jīng)網(wǎng)絡(luò)已廣泛應(yīng)用于BLDCM控制系統(tǒng),并取得了較多的研究成果。本文在參考國內(nèi)外相關(guān)文獻(xiàn)的基礎(chǔ)上,對神經(jīng)網(wǎng)絡(luò)在BLDCM控制系統(tǒng)中的應(yīng)用進(jìn)行歸納總結(jié)。
1 神經(jīng)網(wǎng)絡(luò)在BLDCM控制系統(tǒng)中的應(yīng)用現(xiàn)狀
神經(jīng)網(wǎng)絡(luò)在BLDCM控制系統(tǒng)中的應(yīng)用可分為4類: (1) 神經(jīng)網(wǎng)絡(luò)充當(dāng)辨識器,充當(dāng)BLDCM的動態(tài)數(shù)學(xué)模型;(2) 神經(jīng)網(wǎng)絡(luò)本身充當(dāng)控制器,如內(nèi)模控制器、預(yù)測控制器、模型參考自適應(yīng)控制器等;(3) 神經(jīng)網(wǎng)絡(luò)在BLDCM控制系統(tǒng)中起優(yōu)化計(jì)算的作用;(4) 神經(jīng)網(wǎng)絡(luò)控制與其他智能控制、優(yōu)化算法相結(jié)合,為BLDCM提供非參數(shù)化對象模型、推理模型及優(yōu)化參數(shù)等,如模糊神經(jīng)控制、PID神經(jīng)網(wǎng)絡(luò)控制等。
1.1 BLDCM神經(jīng)網(wǎng)絡(luò)辨識器
在建立BLDCM模型時(shí)所作的若干假設(shè)往往不能忽略,如氣隙磁密是非線性分布的,并非理想的正弦或梯形分布,且電機(jī)可能受到參數(shù)漂移、老化和噪聲干擾等因素影響;若仍按假定數(shù)學(xué)模型構(gòu)造控制系統(tǒng),可能造成系統(tǒng)控制精度不高。神經(jīng)網(wǎng)絡(luò)辨識器具有強(qiáng)大的非線性映射能力,能較好地解決該問題。應(yīng)用于BLDCM中的神經(jīng)網(wǎng)絡(luò)辨識系統(tǒng)的一般結(jié)構(gòu)如圖1所示。其基本原理以BLDCM的實(shí)際輸出與神經(jīng)網(wǎng)絡(luò)辨識器輸出之間的差值為目標(biāo),通過辨識算法調(diào)整辨識網(wǎng)絡(luò)權(quán)值,使神經(jīng)網(wǎng)絡(luò)辨識器無限趨近BLDCM的實(shí)際模型。針對氣隙磁密的非線性分布,文獻(xiàn)[4]從BLDCM電路方程中分離出氣隙磁密這一非線性量,用人工神經(jīng)網(wǎng)絡(luò)非線性逼近的特性,對氣隙磁密波形進(jìn)行逼近,從而建立較為精確的BLDCM模型。為建立更精確的BLDCM數(shù)學(xué)模型,文獻(xiàn)[5]提出采用基于熵類誤差準(zhǔn)則學(xué)習(xí)算法的BP神經(jīng)網(wǎng)絡(luò)來實(shí)現(xiàn)控制系統(tǒng)中BLDCM參數(shù)的實(shí)時(shí)辨識,逼近BLDCM的實(shí)際模型,有效提高了系統(tǒng)的控制精度。
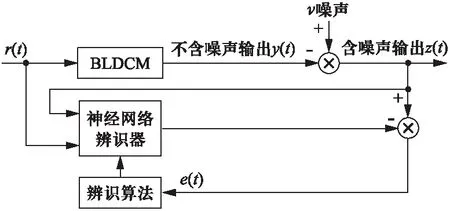
圖1 BLDCM神經(jīng)網(wǎng)絡(luò)辨識系統(tǒng)的一般結(jié)構(gòu)
1.2 BLDCM神經(jīng)網(wǎng)絡(luò)控制器
目前,應(yīng)用于BLDCM中的神經(jīng)網(wǎng)絡(luò)控制器大致有模型參考自適應(yīng)控制器、自校正控制器、內(nèi)模控制器、預(yù)測控制器等。
1.2.1 模型參考自適應(yīng)控制器
模型參考自適應(yīng)神經(jīng)控制系統(tǒng)由參考模型、神經(jīng)網(wǎng)絡(luò)辨識器、自適應(yīng)神經(jīng)網(wǎng)絡(luò)控制器和BLDCM等組成,其原理框圖如圖2所示。通過神經(jīng)網(wǎng)絡(luò)辨識器獲得BLDCM的數(shù)學(xué)模型,在離線訓(xùn)練神經(jīng)網(wǎng)絡(luò)控制器的基礎(chǔ)上,實(shí)現(xiàn)BLDCM的輸出逼近期望輸出。針對BLDCM傳統(tǒng)PID控制方法的不足,文獻(xiàn)[6]提出一種基于徑向基函數(shù)神經(jīng)網(wǎng)絡(luò)在線辨識的單神經(jīng)元PID模型參考自適應(yīng)控制方法。該方法通過構(gòu)造一個(gè)徑向基函數(shù)神經(jīng)網(wǎng)絡(luò)對系統(tǒng)進(jìn)行在線辨識,建立其在線參考模型,同時(shí)由單神經(jīng)元PID控制器完成控制器參數(shù)的自學(xué)習(xí),并在數(shù)字信號處理器中實(shí)現(xiàn)控制參數(shù)的在線調(diào)節(jié)。仿真和試驗(yàn)結(jié)果表明,該控制系統(tǒng)較好地實(shí)現(xiàn)了給定速度參考模型的自適應(yīng)跟蹤,能適應(yīng)環(huán)境變化,具有較強(qiáng)的魯棒性,并已在實(shí)際控制中得到應(yīng)用。
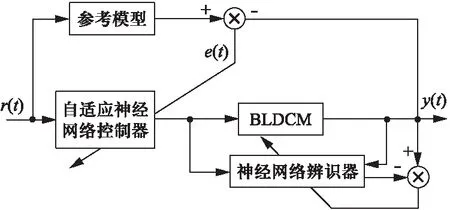
圖2 模型參考自適應(yīng)控制系統(tǒng)
1.2.2 自校正控制器
自校正控制器框圖如圖3所示,其在結(jié)構(gòu)上存在兩個(gè)反饋回路,通過神經(jīng)網(wǎng)絡(luò)估計(jì)器對BLDCM的參數(shù)在線估計(jì)及控制器對系統(tǒng)參數(shù)的自動整定,實(shí)現(xiàn)自適應(yīng)控制。目前,基于梯度下降法的BP自校正神經(jīng)網(wǎng)絡(luò)已在BLDCM控制系統(tǒng)中取得了應(yīng)用[7],其通過在線學(xué)習(xí)來適應(yīng)系統(tǒng)工作環(huán)境和系統(tǒng)本身參數(shù)的變化,以達(dá)到良好的控制效果。另外,針對梯度下降法的不足,一些改進(jìn)的方法,如改進(jìn)的梯度下降法、Levenberg-Marquardt法等也在自校正網(wǎng)絡(luò)中取得了應(yīng)用。
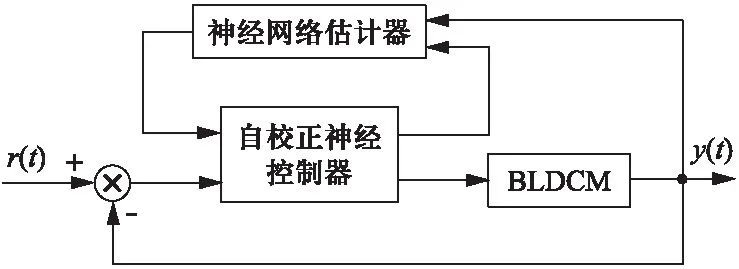
圖3 自校正控制器
1.2.3 神經(jīng)網(wǎng)絡(luò)內(nèi)模控制器
神經(jīng)網(wǎng)絡(luò)內(nèi)模控制器如圖4所示。該控制系統(tǒng)將神經(jīng)網(wǎng)絡(luò)內(nèi)部模型與BLDCM相并聯(lián),并將內(nèi)模神經(jīng)控制器串聯(lián),且以BLDCM與神經(jīng)網(wǎng)絡(luò)內(nèi)部模型輸出之差作為負(fù)反饋信號,反饋到網(wǎng)絡(luò)輸入端,系統(tǒng)穩(wěn)定的條件是控制器和BLDCM都要穩(wěn)定。文獻(xiàn)[8]設(shè)計(jì)了神經(jīng)網(wǎng)絡(luò)內(nèi)模自適應(yīng)速度控制器,利用神經(jīng)網(wǎng)絡(luò)逼近系統(tǒng)的速度控制器和標(biāo)稱模型,離線仿真和試驗(yàn)結(jié)果表明,設(shè)計(jì)的神經(jīng)網(wǎng)絡(luò)內(nèi)模自適應(yīng)控制系統(tǒng)有很強(qiáng)的自適應(yīng)能力,當(dāng)模型參數(shù)發(fā)生變化時(shí),系統(tǒng)具有很強(qiáng)的魯棒性,可獲得很好的動、靜態(tài)特性。
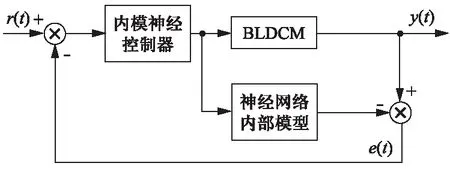
圖4 神經(jīng)網(wǎng)絡(luò)內(nèi)模控制器
1.2.4 神經(jīng)網(wǎng)絡(luò)預(yù)測控制器
神經(jīng)網(wǎng)絡(luò)預(yù)測控制器的結(jié)構(gòu)如圖5所示。神經(jīng)網(wǎng)絡(luò)預(yù)測控制利用作為對象辨識模型的神經(jīng)網(wǎng)絡(luò)產(chǎn)生預(yù)測信號,然后采用優(yōu)化技術(shù)求出控制向量,從而實(shí)現(xiàn)對非線性系統(tǒng)的預(yù)測控制。得到最優(yōu)控制軌線后還可再訓(xùn)練另一個(gè)控制器的神經(jīng)網(wǎng)絡(luò),使其逼近此控制函數(shù),訓(xùn)練結(jié)束后,由此控制器直接對BLDCM進(jìn)行控制。引入濾波器的目的是獲得期望的魯棒性和跟蹤響應(yīng)。例如可用神經(jīng)網(wǎng)絡(luò)來實(shí)現(xiàn)PWM發(fā)生器BLDCM的轉(zhuǎn)速跟蹤,從而在BLDCM的PWM預(yù)測模型基礎(chǔ)上,進(jìn)行BLDCM的神經(jīng)網(wǎng)絡(luò)預(yù)測控制[9]。
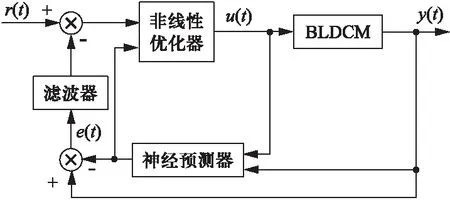
圖5 神經(jīng)網(wǎng)絡(luò)預(yù)測控制器
1.3 神經(jīng)網(wǎng)絡(luò)優(yōu)化計(jì)算在BLDCM控制系統(tǒng)中的應(yīng)用
在BLDCM神經(jīng)網(wǎng)絡(luò)控制系統(tǒng)中,神經(jīng)網(wǎng)絡(luò)優(yōu)化計(jì)算的主要目的是在優(yōu)化神經(jīng)網(wǎng)絡(luò)結(jié)構(gòu)、權(quán)值和算法的基礎(chǔ)上,使BLDCM的轉(zhuǎn)速和轉(zhuǎn)矩波形更理想,轉(zhuǎn)子位置估計(jì)和故障診斷更精確。轉(zhuǎn)速控制主要通過神經(jīng)網(wǎng)絡(luò)控制器的調(diào)節(jié)達(dá)到最優(yōu)。本文著重論述神經(jīng)網(wǎng)絡(luò)優(yōu)化計(jì)算在BLDCM轉(zhuǎn)矩脈動抑制、轉(zhuǎn)子位置估計(jì)和故障診斷上的應(yīng)用。
1.3.1 轉(zhuǎn)矩脈動抑制
BLDCM由于存在電磁轉(zhuǎn)矩脈動的缺陷,降低了其在伺服系統(tǒng)中的應(yīng)用精度,使其應(yīng)用受到限制。采用神經(jīng)網(wǎng)絡(luò)的BLDCM換相轉(zhuǎn)矩脈動抑制的一般方法: 在保持換相過程中相電流下降和上升速率近似相等的條件下,保持回路中總的電流幅值不變,實(shí)現(xiàn)換相轉(zhuǎn)矩波動的抑制。該方法的優(yōu)點(diǎn)是無需預(yù)知系統(tǒng)的精確參數(shù),且對環(huán)境變化有自適應(yīng)調(diào)節(jié)的功能。文獻(xiàn)[10]和[11]采用該方法取得了較好的轉(zhuǎn)矩抑制效果,并在實(shí)際中取得較大應(yīng)用。
1.3.2 轉(zhuǎn)子位置估計(jì)
為實(shí)現(xiàn)同步運(yùn)行,BLDCM必須正確獲取轉(zhuǎn)子位置信號并以此信號控制逆變器實(shí)現(xiàn)換向。目前,神經(jīng)網(wǎng)絡(luò)實(shí)現(xiàn)BLDCM無位置傳感器轉(zhuǎn)子位置估計(jì)的方法有兩種。
(1) 通過對電機(jī)端電壓和相電路的映射,準(zhǔn)確估計(jì)出電機(jī)換向信號,無需預(yù)知電機(jī)的精確參數(shù),能使電機(jī)具有較寬的調(diào)速范圍。文獻(xiàn)[12]將徑向基函數(shù)(Radial Basis Function, RBF)神經(jīng)網(wǎng)絡(luò)應(yīng)用于無刷直流電機(jī)無位置傳感器控制,采用動態(tài)的RBF神經(jīng)網(wǎng)絡(luò)來估計(jì)轉(zhuǎn)子換相位置,采用k-均值聚類法得到RBF網(wǎng)絡(luò)的初始中心,利用梯度下降糾正誤差法更新網(wǎng)絡(luò)參數(shù),使網(wǎng)絡(luò)具有快速在線調(diào)節(jié)能力。文獻(xiàn)[13]在文獻(xiàn)[12]的基礎(chǔ)上對RBF神經(jīng)網(wǎng)絡(luò)在結(jié)構(gòu)上、動態(tài)響應(yīng)性能上作出進(jìn)一步改進(jìn)和完善,按照自適應(yīng)算法構(gòu)造了一個(gè)結(jié)構(gòu)簡單、緊湊的RBF網(wǎng)絡(luò)來實(shí)現(xiàn)電壓、電流與功率開關(guān)導(dǎo)通信號之間的非線性映射,實(shí)現(xiàn)了BLDCM的直接電流控制。
(2) 在外部硬件電路獲得的有效反電動勢信息的基礎(chǔ)上,利用神經(jīng)網(wǎng)絡(luò)的非線性任意逼近特性,進(jìn)行正確的相位補(bǔ)償,實(shí)現(xiàn)無位置BLDCM的控制。文獻(xiàn)[14]根據(jù)BLDCM的電壓模型由測量出的電機(jī)相電壓和相電流得到實(shí)際電動勢,然后和根據(jù)電流模型得出的估計(jì)電動勢進(jìn)行比較,由偏差來修正神經(jīng)網(wǎng)絡(luò)的權(quán)值,進(jìn)而產(chǎn)生新的位置角。文獻(xiàn)[15]在獲取的有效反電動勢的基礎(chǔ)上,采用神經(jīng)網(wǎng)絡(luò)的方法實(shí)現(xiàn)對BLDCM的換相補(bǔ)償控制。文獻(xiàn)[16]將小波網(wǎng)絡(luò)應(yīng)用于BLDCM無位置傳感器控制,采用梯度下降法進(jìn)行網(wǎng)絡(luò)參數(shù)的訓(xùn)練,由離線訓(xùn)練初步確定隱層節(jié)點(diǎn)小波函數(shù)的尺度因子、平移因子及網(wǎng)絡(luò)輸出層連接權(quán)值,然后以濾波和邏輯處理后的網(wǎng)絡(luò)輸出信號為教師對網(wǎng)絡(luò)輸出層連接權(quán)值進(jìn)行在線調(diào)整,網(wǎng)絡(luò)通過對電機(jī)端電壓的電流映射,得到準(zhǔn)確的換相信號。
1.3.3 故障診斷
神經(jīng)網(wǎng)絡(luò)具有強(qiáng)大的非線性映射能力、并行處理能力、良好的學(xué)習(xí)能力、獨(dú)特的聯(lián)想記憶能力等優(yōu)點(diǎn),十分適用于復(fù)雜電機(jī)系統(tǒng)的故障診斷。用人工神經(jīng)網(wǎng)絡(luò)技術(shù)處理故障診斷問題,不僅能進(jìn)行復(fù)雜故障診斷模式的識別,還能進(jìn)行故障嚴(yán)重性評估和故障預(yù)測。由于人工神經(jīng)網(wǎng)絡(luò)能自動獲取診斷知識,使診斷系統(tǒng)具有自適應(yīng)能力。近年來,基于神經(jīng)網(wǎng)絡(luò)的BLDCM故障診斷方法已成為較通用的故障診斷解決方案[17]。
文獻(xiàn)[18]基于改進(jìn)的BP神經(jīng)網(wǎng)絡(luò)算法,設(shè)計(jì)并分析了一套針對BLDCM的狀態(tài)觀測器故障診斷方法。用神經(jīng)網(wǎng)絡(luò)取代分析冗余技術(shù),由電機(jī)控制系統(tǒng)的輸入- 輸出信號進(jìn)行訓(xùn)練,通過比較實(shí)際輸出和神經(jīng)網(wǎng)絡(luò)觀測器的輸出殘差來檢測和區(qū)分故障。仿真結(jié)果表明,該方法能快速確定故障的時(shí)間、位置。文獻(xiàn)[19]在文獻(xiàn)[18]的基礎(chǔ)上使用一種基于遺傳算法學(xué)習(xí)的小波神經(jīng)網(wǎng)絡(luò),解決了冗余技術(shù)中至關(guān)重要的故障診斷問題。
文獻(xiàn)[20]提出將模糊神經(jīng)網(wǎng)絡(luò)用于BLDCM故障診斷,給出了模糊神經(jīng)網(wǎng)絡(luò)的結(jié)構(gòu)和學(xué)習(xí)算法,并提出了一種閾值向量故障診斷方法,在實(shí)際應(yīng)用中驗(yàn)證了該方法的有效性。
1.4 神經(jīng)網(wǎng)絡(luò)控制與其他智能控制相結(jié)合在BLDCM控制系統(tǒng)中的應(yīng)用
現(xiàn)階段,神經(jīng)網(wǎng)絡(luò)控制與其他智能控制相結(jié)合,相互彌補(bǔ),充分發(fā)揮各自優(yōu)點(diǎn),已形成了各具特色的復(fù)合控制系統(tǒng),可分為兩大類。
(1) 其他智能控制優(yōu)化神經(jīng)網(wǎng)絡(luò)。如針對神經(jīng)網(wǎng)絡(luò)初始權(quán)值選擇較難、學(xué)習(xí)算法收斂速度慢等缺點(diǎn),將具有全局搜索能力強(qiáng)的粒子群算法、遺傳算法、蟻群算法等智能算法與神經(jīng)網(wǎng)絡(luò)結(jié)合,使系統(tǒng)控制效果更好。如針對神經(jīng)網(wǎng)絡(luò)的初始權(quán)值對控制效果的不利影響,文獻(xiàn)[21]提出一種基于遺傳算法優(yōu)化的BP神經(jīng)網(wǎng)絡(luò)PID控制算法,將其應(yīng)用于BLDCM轉(zhuǎn)速控制系統(tǒng)中取得了較好效果。為進(jìn)一步提高控制精度,文獻(xiàn)[22]針對BLDCM傳統(tǒng)參數(shù)固定的速度控制器在電機(jī)參數(shù)發(fā)生改變時(shí),預(yù)先設(shè)定的控制器參數(shù)很難適應(yīng)新的運(yùn)行情況,提出將BP神經(jīng)網(wǎng)絡(luò)與矢量控制器相結(jié)合,并用遺傳算法來優(yōu)化神經(jīng)網(wǎng)絡(luò)的初始連接權(quán)值,實(shí)際表明該系統(tǒng)具有良好的應(yīng)用性。另外,將神經(jīng)網(wǎng)絡(luò)與模糊控制相結(jié)合[23]、用粒子群算法來優(yōu)化PID控制器的參數(shù)[24]等復(fù)合控制也已在BLDCM控制系統(tǒng)中廣泛應(yīng)用。
(2) 神經(jīng)網(wǎng)絡(luò)優(yōu)化其他智能控制。如針對傳統(tǒng)PID參數(shù)易受環(huán)境條件影響[25]、單純滑模變結(jié)構(gòu)易出現(xiàn)“抖動”[26]、模糊控制規(guī)則的模糊不確定性[27]等現(xiàn)象,應(yīng)用神經(jīng)網(wǎng)絡(luò)的非線性映射能力,可有效優(yōu)化其參數(shù)變化,達(dá)到理想的控制效果。
2 討論與展望
神經(jīng)網(wǎng)絡(luò)具有強(qiáng)大的非線性信息處理能力,故其在BLDCM控制系統(tǒng)中的應(yīng)用取得了巨大成功,具體表現(xiàn)在: 作為辨識器能夠較好地逼近BLDCM的數(shù)學(xué)模型;作為控制器,實(shí)現(xiàn)BLDCM高精度控制;與其他智能控制相結(jié)合優(yōu)化了控制效果。
神經(jīng)網(wǎng)絡(luò)存在的問題,如神經(jīng)網(wǎng)絡(luò)穩(wěn)定性及收斂性、初始權(quán)值的設(shè)置、算法收斂速度、網(wǎng)絡(luò)模型結(jié)構(gòu)的選擇等,仍是影響其在BLDCM高精度控制中應(yīng)用的因素。將神經(jīng)網(wǎng)絡(luò)應(yīng)用于BLDCM控制系統(tǒng)中應(yīng)解決的問題如下。
(1) 對于BLDCM這一非線性系統(tǒng),僅僅依靠一種理論、一種方法無法實(shí)現(xiàn)在復(fù)雜環(huán)境下準(zhǔn)確、及時(shí)地進(jìn)行電機(jī)控制。可考慮采用多重神經(jīng)網(wǎng)絡(luò)模型結(jié)構(gòu),以減少單一模型控制精度低、網(wǎng)絡(luò)訓(xùn)練時(shí)間較長等問題。
(2) 提高網(wǎng)絡(luò)訓(xùn)練速度方面的研究,可考慮從求解算法(如增廣卡爾曼濾波算法、局部化算法、遞推算法等)、網(wǎng)絡(luò)結(jié)構(gòu)簡化的角度入手。
(3) 訓(xùn)練樣本的選取及不同來源樣本的綜合運(yùn)用,對電機(jī)模型的依賴及噪聲引起的偏差。
(4) 新的網(wǎng)絡(luò)模型(自組織神經(jīng)網(wǎng)絡(luò)、混沌神經(jīng)網(wǎng)絡(luò)等)的理論研究與應(yīng)用。
(5) 將多種智能控制相結(jié)合組成復(fù)合智能控制器,如模糊小腦神經(jīng)網(wǎng)絡(luò)PID控制。
另外,神經(jīng)網(wǎng)絡(luò)在BLDCM控制系統(tǒng)中的應(yīng)用多數(shù)處于理論仿真試驗(yàn)研究階段,實(shí)際控制系統(tǒng)中的應(yīng)用還較少。如何針對控制系統(tǒng)的特點(diǎn)選擇適用于控制系統(tǒng)分析和設(shè)計(jì)的神經(jīng)網(wǎng)絡(luò)或其變形結(jié)構(gòu)是今后需要進(jìn)一步研究的內(nèi)容。
3 結(jié) 語
本文詳細(xì)論述了神經(jīng)網(wǎng)絡(luò)在BLDCM控制系統(tǒng)中的應(yīng)用現(xiàn)狀,為高精度BLDCM神經(jīng)網(wǎng)絡(luò)控制系統(tǒng)的設(shè)計(jì)提供了思路。神經(jīng)網(wǎng)絡(luò)是一種非常有效的智能控制方法,新的神經(jīng)網(wǎng)絡(luò)模型及智能復(fù)合控制系統(tǒng)將成為未來的發(fā)展趨勢。
【參考文獻(xiàn)】
[1] 葉金虎.現(xiàn)代無刷直流永磁電動機(jī)的原理和設(shè)計(jì)[M].北京: 科學(xué)出版社,2007.
[2] CHEN Z Q, MUTUWO T, DOKI S J, et al. New adaptive sliding observer for position and velocity-sensorless controls of brushless DC motor[J]. IEEE Trans on Industrial Electronics, 2000,47(3): 582-591.
[3] WU H X, CHENG S K, CUI S M. A controller of brushless DC motor for electric vehicle[J]. IEEE Transactions on Magnetics, 2005,41(1): 509-513.
[4] 黃平林.一種基于神經(jīng)網(wǎng)絡(luò)的無刷直流電機(jī)模型及仿真[J].電機(jī)技術(shù),2004,1(3): 8-11.
[5] 亓濤,姚曉東.BP網(wǎng)絡(luò)在無刷直流電機(jī)參數(shù)辨識與控制中的應(yīng)用[J].微電機(jī),2005,38(6): 58-60.
[6] 夏長亮,李志強(qiáng),王明超,等.基于RBF神經(jīng)網(wǎng)絡(luò)在線辨識的永磁無刷直流電機(jī)單神經(jīng)元PID模型參考自適應(yīng)控制[J].電工技術(shù)學(xué)報(bào),2005,20(11): 65-69.
[7] 郭緒猛,劉景林,徐建德.無刷直流電機(jī)神經(jīng)網(wǎng)絡(luò)自校正控制研究[J].測控技術(shù),2008(3): 55-57.
[8] 沈艷霞,王友利,紀(jì)志成.無刷直流電機(jī)神經(jīng)網(wǎng)絡(luò)內(nèi)模自適應(yīng)控制器設(shè)計(jì)[J].電力電子技術(shù),2005,39(3): 40- 42.
[9] 王群京,姜衛(wèi)東,趙濤,等.基于神經(jīng)網(wǎng)絡(luò)的無刷直流電機(jī)預(yù)測控制的仿真研究[J].系統(tǒng)仿真學(xué)報(bào),2005,17(6): 1490-1493.
[10] KIM D K, LEE K W, KWON B I. Commutation torque ripple reduction in a position sensorless brush-less DC motor drive[J]. IEEE Transactions on Power Electronics, 2006,21(6): 1762-1768.
[11] LAI Y S, LIN Y K. A unified approach to back-EMF detection for brushless DC motor drives without current and hall sensors[J]. IEEE Transactions on Power Electronics, 2003,18(6): 1293-1298.
[12] 夏長亮,文德,范娟,等.基于RBF神經(jīng)網(wǎng)絡(luò)的無刷直流電機(jī)無位置傳感器控制[J].電工技術(shù)學(xué)報(bào),2002,17(3): 26-29.
[13] 夏長亮,王娟,史婷娜,等.基于自適應(yīng)徑向基函數(shù)神經(jīng)網(wǎng)絡(luò)的無刷直流電機(jī)直接電流控制[J].中國電機(jī)工程學(xué)報(bào),2003,23(6): 123-127.
[14] 劉慧博,張繼鵬.基于神經(jīng)網(wǎng)絡(luò)的無刷直流電機(jī)轉(zhuǎn)子位置估計(jì)[J].微電機(jī),2003,36(3): 30-32.
[15] 毛懌弘,鄒俊忠,姚曉東,等.基于神經(jīng)元網(wǎng)絡(luò)的電機(jī)換相控制[J].東南大學(xué)學(xué)報(bào),2003,33(9): 134-136.
[16] 史婷娜,田洋,夏長亮,等.基于小波網(wǎng)絡(luò)的永磁無刷直流電機(jī)無位置傳感器控制[J].天津大學(xué)學(xué)報(bào),2007,40(2): 190-194.
[17] 黎文鋒,鄧?yán)^忠,沈雷.神經(jīng)網(wǎng)絡(luò)在電機(jī)故障診斷中的應(yīng)用綜述[J].電氣應(yīng)用,2006,25(3): 45- 47.
[18] 李爭,劉朝英,宋雪玲,等.基于神經(jīng)網(wǎng)絡(luò)的無刷直流電機(jī)故障診斷和容錯(cuò)控制方法的研究[J].河北工業(yè)科技,2009,26(5): 411- 414.
[19] 史婷娜,田洋,夏長亮,等.基于小波網(wǎng)絡(luò)的永磁無刷直流電機(jī)無位置傳感器控制[J].天津大學(xué)學(xué)報(bào),2007,40(2): 190-194.
[20] 劉勝利,曾鳴,蘇寶庫.基于模糊神經(jīng)網(wǎng)絡(luò)的故障診斷及其在無刷直流電機(jī)系統(tǒng)中的應(yīng)用[J].中國慣性技術(shù)學(xué)報(bào),1999,7(2): 30-34.
[21] CHEN H C, LIAW C M. Current mode control for sensorless BDCM drive with intelligent commutation tuning[J]. IEEE Transactions on Power Electronics,2002,5(17): 747-756.
[22] 王家達(dá),劉祖望.基于遺傳神經(jīng)網(wǎng)絡(luò)的無刷直流電機(jī)矢量控制系統(tǒng)設(shè)計(jì)[J].儀器儀表學(xué)報(bào),2007,28(8): 201-203.
[23] 楊巧玲,郝曉弘,張海平.基于神經(jīng)網(wǎng)絡(luò)自抗擾控制的無刷直流電機(jī)控制器研究[J].科學(xué)技術(shù)與工程,2008,8(24): 6478-6481.
[24] 付麗輝.基于改進(jìn)型BP神經(jīng)網(wǎng)絡(luò)的無刷直流電機(jī)調(diào)速系統(tǒng)的應(yīng)用研究[J].大慶師范學(xué)院學(xué)報(bào),2010,30(6): 29-32.
[25] 杜軍,萬健如,許鎮(zhèn)琳.神經(jīng)網(wǎng)絡(luò)模糊控制在無刷直流電機(jī)中的研究與實(shí)現(xiàn)[J].組合機(jī)床與自動化加工技術(shù),2005(12): 70-72.
[26] 安樹.基于RBF網(wǎng)絡(luò)的滑模變結(jié)構(gòu)控制在無刷直流電機(jī)伺服系統(tǒng)中的應(yīng)用[J].軍械工程學(xué)院學(xué)報(bào),2010,22(2): 61-64.
[27] 夏長亮,劉丹,王迎發(fā).無刷直流電機(jī)免疫反饋?zhàn)赃m應(yīng)學(xué)習(xí)人工神經(jīng)網(wǎng)絡(luò)控制[J].天津大學(xué)學(xué)報(bào),2007,40(10): 1235-1240.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
裝備制造技術(shù)(2020年3期)2020-12-25 05:22:30
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
北京航空航天大學(xué)學(xué)報(bào)(2016年6期)2016-11-16 01:50:43
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
重慶工商大學(xué)學(xué)報(bào)(自然科學(xué)版)(2015年10期)2015-12-28 07:43:58
核科學(xué)與工程(2015年4期)2015-09-26 11:59:03
振動、測試與診斷(2014年5期)2014-03-01 01:14:21
機(jī)械與電子(2014年1期)2014-02-28 02:07:31
