菱形微位移壓電作動器的輸入輸出線性建模
2014-08-08 01:00:50張春林張希農陳杰張帥
西安交通大學學報 2014年5期
張春林,張希農,陳杰,張帥
(西安交通大學機械結構強度與振動國家重點實驗室, 710049, 西安)
菱形微位移壓電作動器的輸入輸出線性建模
張春林,張希農,陳杰,張帥
(西安交通大學機械結構強度與振動國家重點實驗室, 710049, 西安)
針對某定位裝置的位移輸出問題,研究了一種新型菱形微位移壓電作動器,該壓電作動器包括壓電陶瓷、菱形微位移放大機構以及柔性鉸鏈部分。對菱形微位移放大機構的放大系數進行了分析,發現該放大機構具有把壓電堆的原始位移輸出從30 μm放大到100 μm的能力,放大倍數與菱形環自身夾角θ有關,并且在壓電堆輸出范圍內為比例放大,這些結果可以為更大放大系數的菱形環設計提供依據。建立了該菱形微位移壓電作動器輸入輸出關系的理論線性模型,并將線性模型的模擬結果與實驗結果進行了對比,證明該壓電作動器線性模型具有較好的精度,能比較準確地反映微位移壓電作動器的輸入輸出關系。
壓電陶瓷;作動器;位移放大機構;線性建模
壓電作動器因其輸出位移分辨率高、出力大、響應快、功耗小等優點,已被廣泛應用于機械、電力、航空航天等領域,是目前最具前途的智能驅動器件之一。但是,壓電作動器的位移輸出特性有時又限制了其在某些情況下的應用,因而在某些情況下壓電作動器的應用需伴有位移放大機構[1]。國內外學者已對位移放大機構進行了大量的研究。國外的位移放大機構主要有杠桿機構[2-3]、Scott-Russell型位移放大機構[4]、鈸型壓電作動器[5]、放大尺式位移放大器[6]以及蜂窩桿式位移放大機構[7]等。國內關于位移放大機構的研究主要有:王隆太等對柔性鉸鏈位移放大機構的研究[8];吳家龍等對液壓微位移放大器的設計與研究[9];李萬全等開展的基于液壓微位移放大機構的壓電陶瓷執行器的研究[10];等等。
本文提出的菱形微位移放大機構與鈸型壓電作動器[5]結構類似,但具有更緊湊的結構和更好的裝配能力,同時還具有微位移特性、較大的放大系數以及能提供壓電堆抵抗橫向干擾力的能力。
建立作動器的輸入輸出模型對于整個作動放大機構的仿真、控制以及后續應用起著至關重要的作用,尤其是對于高精度的伺服控制[11]。為此,本文通過對菱形微位移放大機構的放大系數的分析,基于力學分析建立了位移放大器輸入輸出關系的線性模型,并通過實驗對比驗證了此線性模型的準確性,以期為菱形微位移壓電作動器的后續應用提供理論參考。
1 菱形微位移壓電作動器的原理
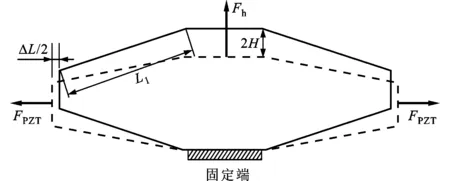
圖1為菱形微位移壓電作動器的示意圖。該機構包含2部分:上部的柔性鉸鏈部分(與目標裝置相連);下部的菱形微位移放大機構,它給壓電堆(PZT)提供約束,并主要實現位移放大功能以及與基底相連。當給壓電堆一個輸入電壓時,壓電堆將沿軸向輸出一定的位移,同時菱形微位移放大機構會輸出一個豎向位移,從而實現橫向變豎向的位移放大。
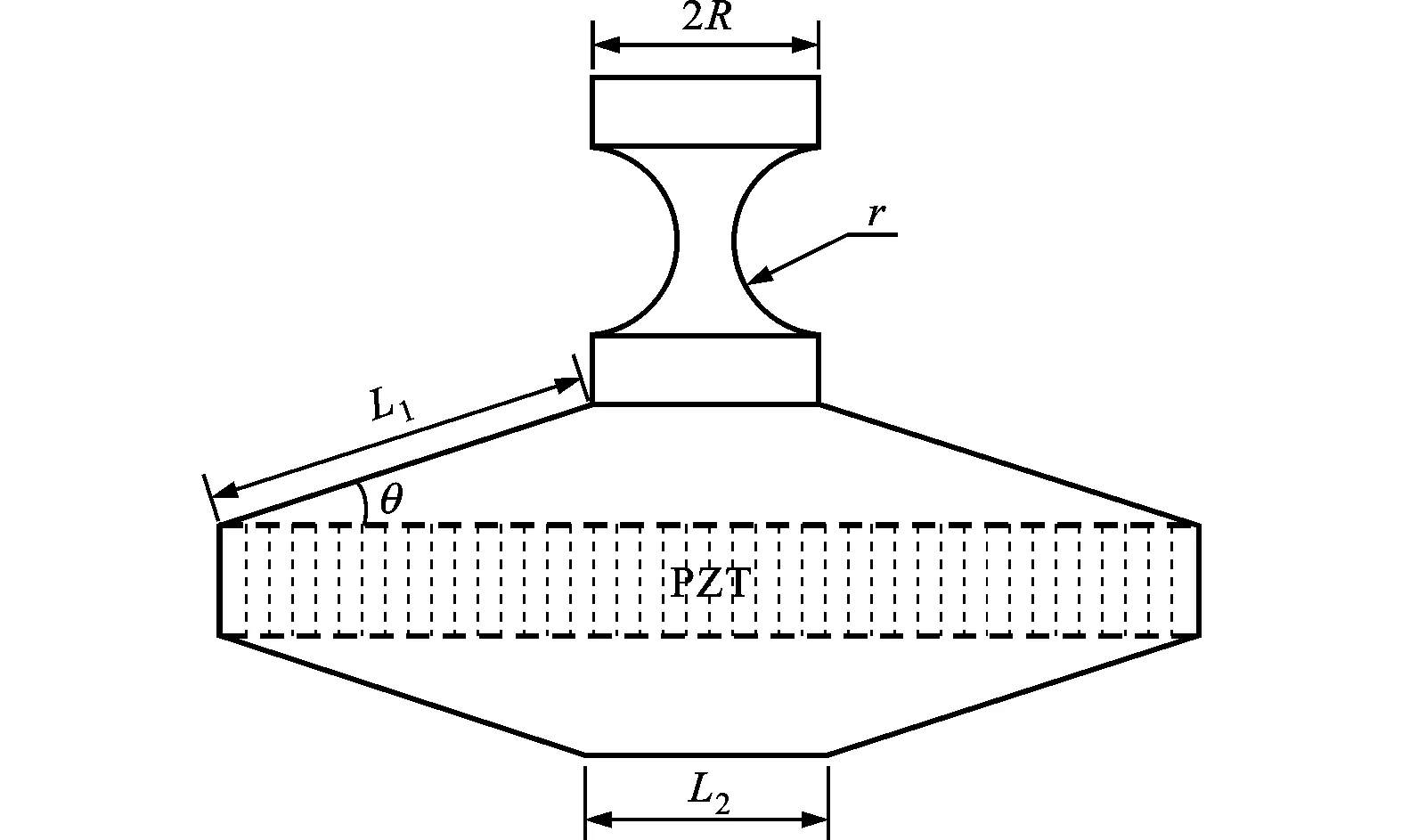
圖1 菱形微位移壓電作動器示意圖
2 線性模型
2.1 菱形微位移放大器的幾何放大關系
菱形微位移放大機構為對稱結構,可認為由8根桿件和8個柔性轉角組成。本文假設8根桿件均為剛性結構,即忽略作動器在工作過程中桿件的彈性變形,則菱形微位移放大機構工作前、后的變形如圖2所示,其中L1、L2分別為菱形框2條邊的邊長,ΔL和2H分別為輸入和輸出位移。定義Ra=2H/ΔL為放大系數。
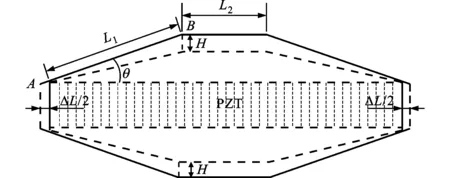
圖2 菱形微位移放大機構工作示意圖
通過圖2,可得到壓電堆輸入位移和菱形微位移放大機構放大后輸出位移的關系式如下

(1)
整理后得
(2)
將式(2)關于ΔL作泰勒級數展開,可化為
(3)
式中:ΔL為壓電堆的輸入位移;2H為菱形微位移放大機構的輸出位移;θ為初始狀態時桿AB與水平壓電堆之間的夾角;L1為桿AB的長度。當ΔL?L1時,平方項中的ΔL/L1可認為是無窮小量,從而可得到式(3)的簡化線性關系表達式
(4)
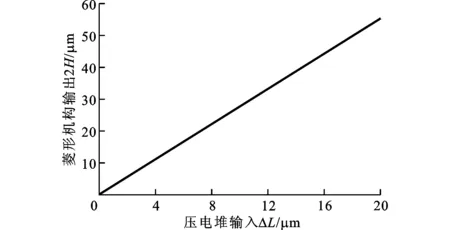
圖3 菱形微位移放大機構的輸入輸出曲線
(a)菱形放大機構受力圖
(b)1/4菱形放大機構變形圖
2.2 菱形微位移放大機構輸入輸出線性模型
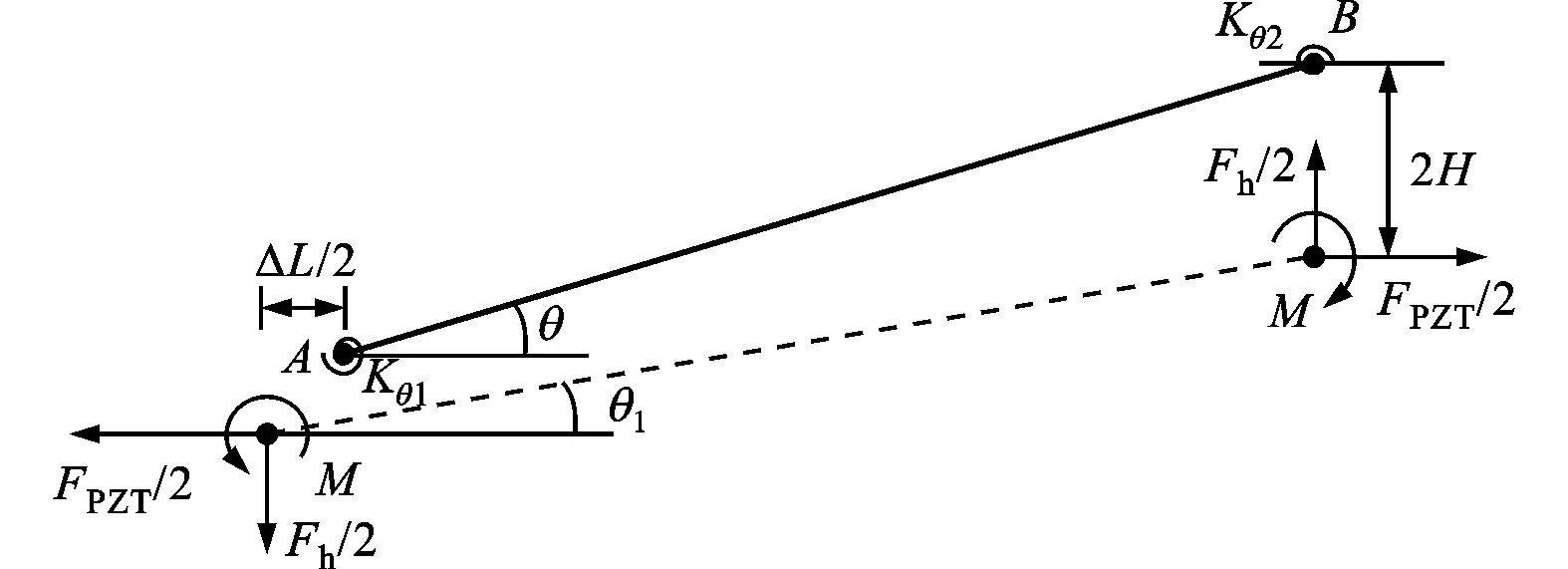
由于菱形微位移放大機構為對稱結構,故取其1/4作為研究對象。圖4為菱形微位移放大機構的受力示意圖以及1/4放大機構的幾何變形圖。1/4菱形微位移放大機構被等效成剛體桿件AB和2個扭轉彈簧。
當壓電作動器無約束時,給作動器一個電壓會產生一個大小為KvV的位移,其中V為電壓,Kv為壓電應變常數。當壓電作動器有菱形環約束時,它將會提供給菱形環一個反作用力FPZT,同時柔性鉸鏈也可能提供給菱形環一個豎直方向的外加力Fh,此時的受力如圖4a所示。當取1/4位移放大機構為研究對象時,反作用力FPZT作用于A點可簡化為力和力偶M的形式,受力如圖4b所示,其中力偶

(5)
基于能量守恒原理,變形后外力所做的功等于A、B兩點增加的勢能,因此可以得到如下能量關系式

(6)
式中:Kθ1、Kθ2為A、B兩點的扭轉彈簧剛度系數;Δθ=θ-θ1。
由圖4b,可得到變形前后的位移幾何條件
(7)
式中:Ra為放大系數。
基于壓電堆的本構關系,可得壓電堆電、位移和力三者之間的關系為

(8)
式中:KP為壓電堆等效剛度。
聯立式(4)~式(6),可得菱形機構的線性模型
(9)
當菱形微位移作動器不給目標被驅動機構提供作動力(即Fh=0)時,式(7)可簡化為
(10)
(Kθ1+Kθ2)的值可以由ANSYS靜力分析求得。
基于ANSYS有限元軟件,利用SOLID45三維實體單元建立了圖4a所示菱形微位移放大機構的有限元模型。為模擬菱形微位移放大機構的實際工作受力情況,沿壓電作動器(PZT)軸向(x軸方向)施加大小為154 N的對稱面力。
圖5為菱形微位移放大機構在上述載荷、約束下的變形圖,圖中的最大變形值(即圖4a中的2H)為0.242 693 mm。由靜力分析結果中力、變形的關系,可以求得式(8)中(Kθ1+Kθ2)的值。
式(8)最終可以簡化為
2H=KV
(11)

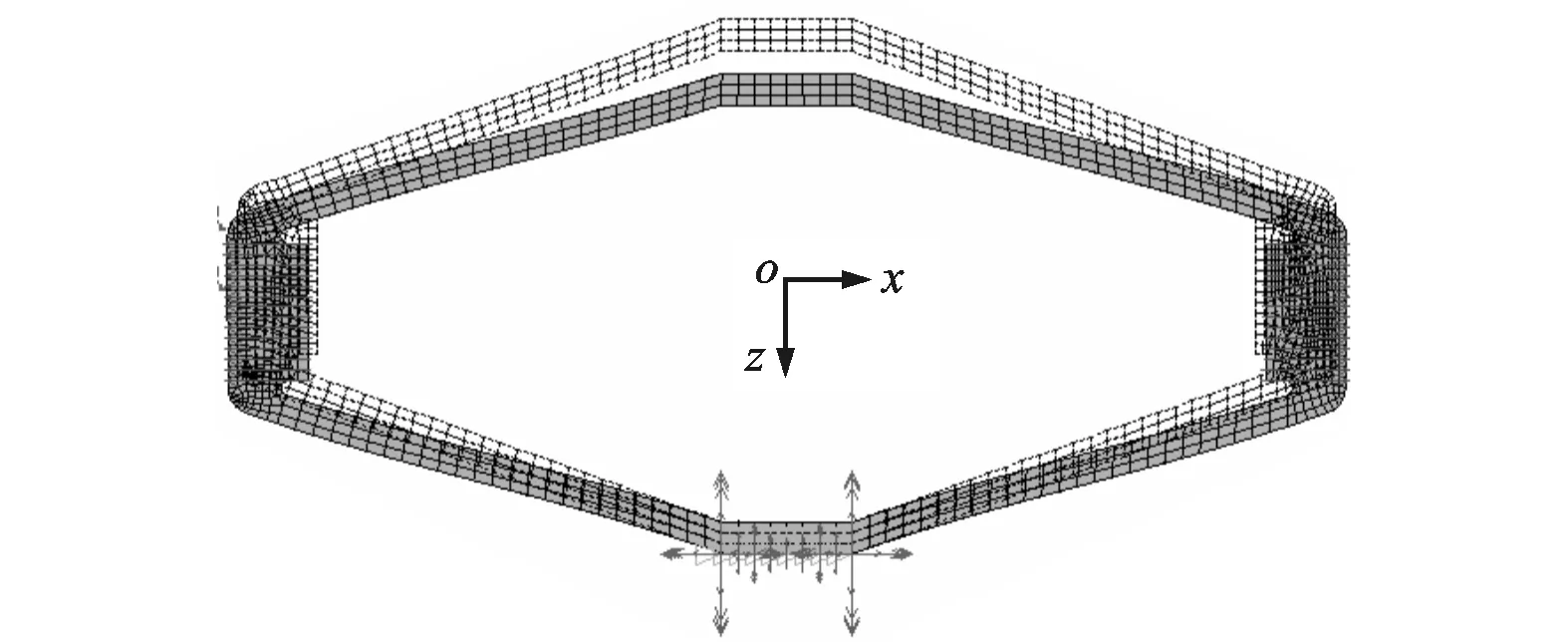
圖5 菱形微位移放大機構靜力變形圖
3 壓電作動器的輸入輸出測試實驗
在微位移壓電作動器中,使用的壓電堆為Physik Instrumente P-885.91,正向飽和電壓為120 V。因為壓電陶瓷作動器不能承受大的拉伸載荷,而且其收縮驅動性能要顯著弱于伸長驅動性能,所以為保證作動器安全穩定,取工作電壓范圍為0~120 V。圖6為菱形微位移壓電作動器實物圖。實驗系統包括:1臺KEYENCE LK-G80激光位移計,測量精度為0.1 μm;1臺預裝Simulink的計算機;1套dSPACE 1103系統;1個西安交通大學自制的功率放大器。
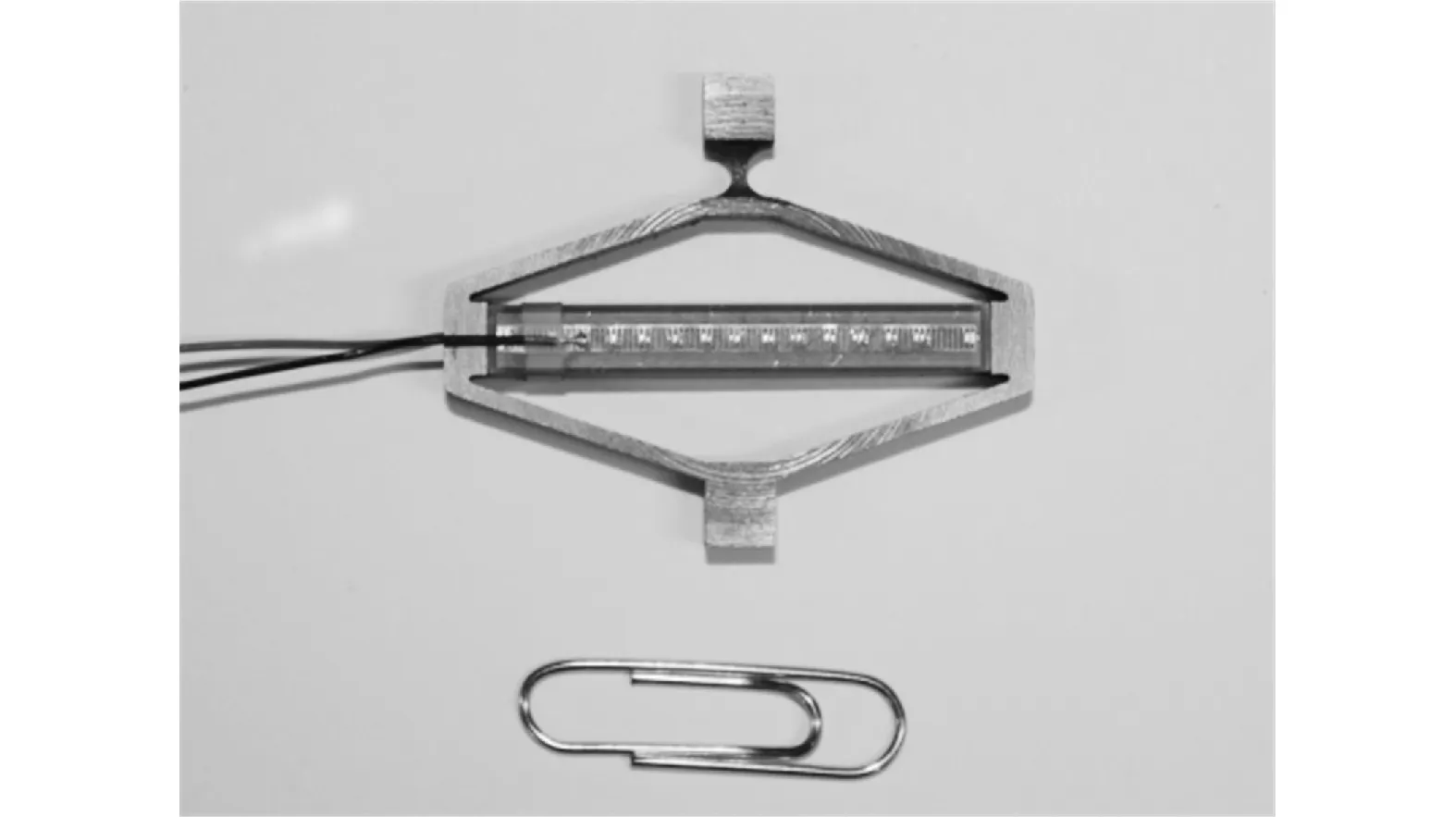
圖6 菱形微位移壓電作動器實物圖
圖7為壓電作動器輸入輸出測試實驗的流程框圖。首先由計算機生成一條線性的輸入電壓曲線,如圖8所示。盡管壓電堆能夠施加一定量的負向電壓,但為了系統穩定,僅允許系統的最低電壓為0 V。計算機通過dSPACE系統把數字信號轉化為電壓信號,再經過功率放大器把該電壓信號施加于微位移壓電作動器,由激光位移計測量作動器的輸出位移,并通過dSPACE系統把電信號轉變為數字信號。圖9為經過信號處理后所得到的壓電作動器輸出位移曲線。
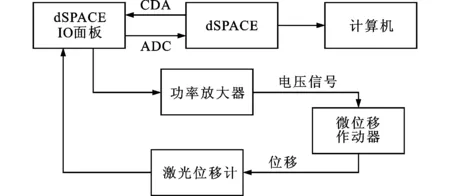
圖7 壓電作動器輸入輸出測試實驗的流程框圖
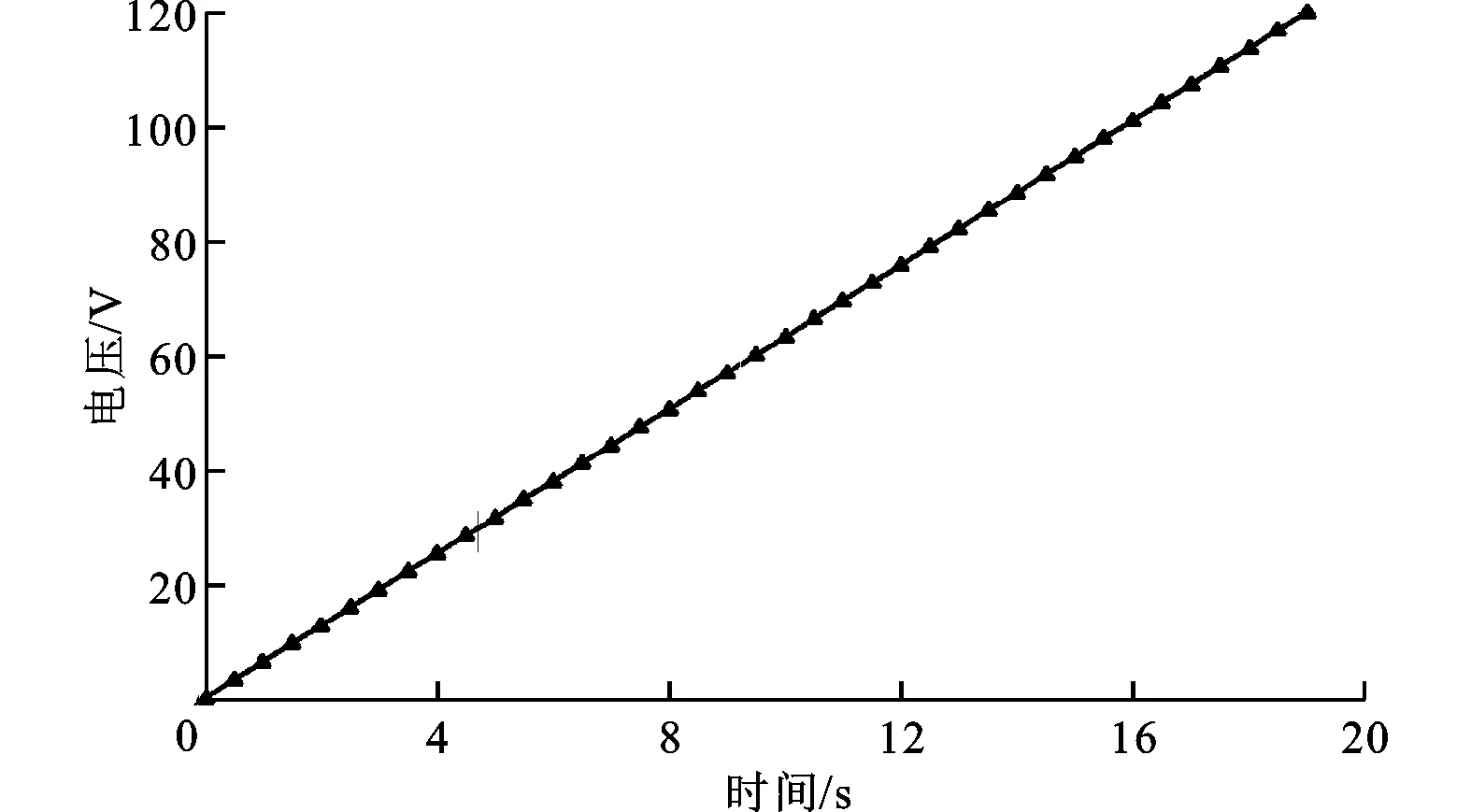
圖8 壓電作動器的輸入電壓曲線
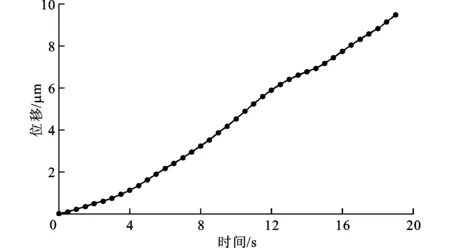
圖9 壓電作動器的輸出位移曲線
圖10為位移放大機構輸入輸出關系線性模型的模擬結果與實驗結果的對比圖,可以看出:在電壓上升階段,線性模型的模擬結果與實驗結果誤差較小,能比較準確地反映微位移壓電作動器的輸入輸出關系。
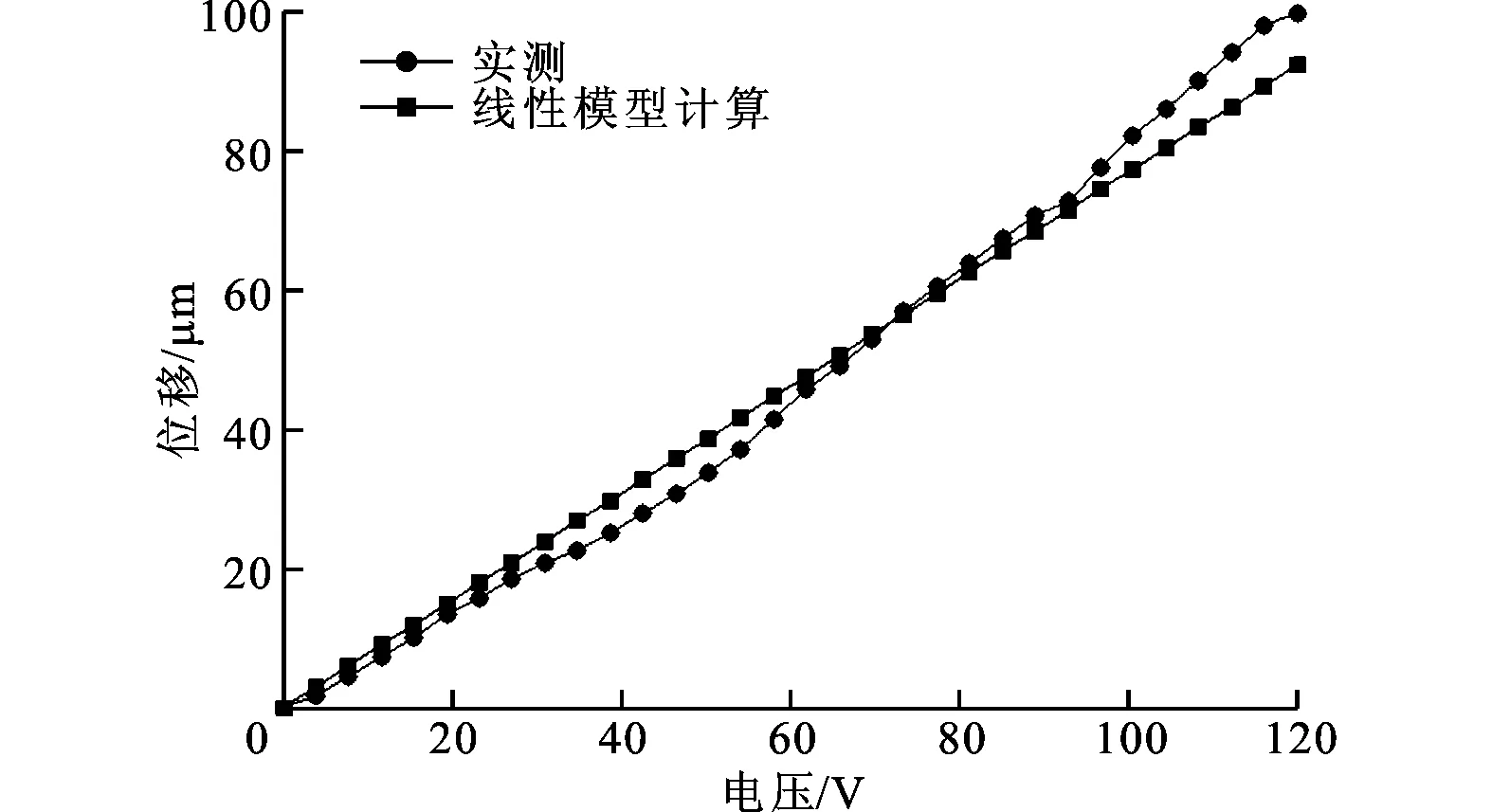
圖10 線性模型模擬結果與實驗結果的對比
4 結 論
本文針對某定位裝置的位移輸出問題,研制了一種新的菱形微位移放大機構。該放大機構具有把壓電堆原始30 μm的位移輸出放大成100 μm輸出的能力。
由位移放大機構放大關系的分析可知,放大倍數與菱形環自身夾角θ有關,并且在壓電堆輸出范圍內為比例放大,這一結論可為具有更大放大系數的菱形環設計提供依據。
菱形微位移壓電作動器的位移輸入輸出測試實驗結果表明,理論線性模型的模擬結果與實驗結果相對誤差較小,能比較準確地反映微位移壓電作動器的輸入輸出關系,從而可為后續菱形微位移壓電作動器的應用提供理論參考。
[1] XU W, KING T. Flexure hinges for piezoactuator displacement amplifiers: flexibility, accuracy, and stress considerations [J]. Precis Eng, 1996, 19(1): 4-10.
[2] OUYANG P R, ZHANG W J, GUPTA M M. A new compliant mechanical amplifier based on a symmetric five-bar topology [J]. J Mech Des, 2008, 130(10): 104501.
[3] ZUBIR M N M, SHIRINZADEH B. Development of a high precision flexure-based microgripper [J]. Precis Eng, 2009, 33(4): 362-370.
[4] TIAN Y, SHIRINZADEH B, ZHANG D. Development and dynamic modelling of a flexure-based Scott-Russell mechanism for nano-manipulation [J]. Mech Syst Signal Proc, 2009, 23(3): 957-978.
[5] JAMES F T, ROBERT E N. Special issue correspondence doubly resonant cymbal-type transducers [J]. IEEE Trans Ultrason, Ferro Elect, Freq Contr, 1997, 44(5): 1175-1177.
[6] ISHII Y, THUMME T, HORIE M. Dynamic characteristic of miniature molding pantograph mechanisms for surface mount systems [J] Microsyst Technol, 2005, 11(8/9/10): 991-996.
[7] MURAOKA M, SANADA S. Displacement amplifier for piezoelectric actuator based on honeycomb link mechanism [J] Sensors and Actuators: A Physical, 2010, 157: 84-90.
[8] 王隆太, 周志平, 馬志新. 柔性鉸鏈位移放大機構放大能力和負載能力分析 [J]. 機械設計, 2007, 24(7): 11-13. WANG Longtai, ZHOU Zhiping, MA Zhixin. Analysis on magnification ability and loading capacity of displacement magnification mechanism of flexible hinge [J]. Journal of Machine Design, 2007, 24(7): 11-13.
[9] 吳家龍, 李寶富, 張虎翼, 等. 液壓微位移放大器的設計與研究 [J]. 機電一體化, 2010(5): 13-16, 20. WU Jialong, LI Baofu, ZHANG Huyi, et al. The design and analysis of hydraulic micro-displacement amplifier [J]. Mechatronics, 2010(5): 13-16, 20.
[10]李萬全, 高長銀, 馮地耘. 基于液壓微位移放大機構的壓電陶瓷執行器的設計 [J]. 機床與液壓, 2011, 39(5): 88-89. LI Wanquan, GAO Changyin, FENG Diyun. Design on piezoelectric actuator based on hydraulic micro-displacement amplifying mechanism [J]. Machine Tool & Hydraulics, 2011, 39(5): 88-89.
[11]SHIN H C, CHOI S B. Position control of a two-link flexible manipulator featuring piezoelectric actuators and sensors [J]. Mechatronics, 2001, 11(6): 707-729.
(編輯 葛趙青)
LinearModelingforInput-OutputRelationsofaRhombicMicro-DisplacementPiezoelectricActuator
ZHANG Chunlin,ZHANG Xinong,CHEN Jie,ZHANG Shuai
(State Key Laboratory for Strength and Vibration of Mechanical Structures, Xi’an Jiaotong University, Xi’an 710049, China)
A rhombic micro-displacement piezoelectric actuator (RMPA) is proposed to deal with the displacement output of a positioning device. The RMPA consists of three parts, i.e., a Pb based lanthanum doped zirconate titanate (PZT) actuator, a flexible hinge, and a rhombic amplification mechanism. The geometric amplification relations of amplification mechanism are analyzed. The mechanism can amplify the displacement output from 30 μm to 100 μm, and the magnification coefficient is proportionally magnified in a rated range and is related to the rhombic ring angleθ, which can provide a basis for design of rhombic amplification mechanism with greater magnification coefficient. A linear model of RMPA input and output relation is constructed, and the comparison between the linear model and experiments shows that the theoretical linear model has better expression for RMPA and higher accuracy.
Pb based lanthanum doped zirconate titanate (PZT); actuator; displacement amplifier; linearly modeling
10.7652/xjtuxb201405018
2013-11-05。 作者簡介: 張春林(1988—),男,博士生;張希農(通信作者),男,教授,博士生導師。 基金項目: 國家自然科學基金資助項目(11102147)。
時間: 2014-03-05 網絡出版地址:http:∥www.cnki.net/kcms/detail/61.1069.T.20140305.1118.003.html
TP183
:A
:0253-987X(2014)05-0102-05
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
中華詩詞(2020年1期)2020-09-21 09:24:52
數學物理學報(2020年2期)2020-06-02 11:29:24
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
小學生作文(中高年級適用)(2018年5期)2018-06-11 01:22:56
中學生數理化·七年級數學人教版(2017年11期)2017-04-23 07:18:00
數學大王·中高年級(2016年12期)2016-12-26 21:37:36
光學精密工程(2016年6期)2016-11-07 09:07:19