氣溶膠采樣頭在無人機上安裝位置的模擬
2014-08-07 14:10:50張詩建朱振宇張亞飛姬亞芹南開大學環境科學與工程學院天津300071
中國環境科學 2014年9期
張 靜,張詩建,朱振宇,張亞飛,姬亞芹(南開大學環境科學與工程學院,天津 300071)
氣溶膠采樣頭在無人機上安裝位置的模擬
張 靜,張詩建,朱振宇,張亞飛,姬亞芹*(南開大學環境科學與工程學院,天津 300071)
利用流體力學軟件CFD對固定翼無人機在海拔1000m高處以30m/s速度飛行時采樣頭的最佳安裝位置進行了模擬.首先利用ICEM CFD前處理軟件對無人機模型進行了網格劃分;然后利用FLUENT軟件及其中的DPM模型先后對氣相(連續相)和顆粒相(離散相)分別進行了數值模擬,最后用DPM模型模擬了從速度入口方向以30m/s速度釋放粒徑為1,2.5,10μm的顆粒物,由顆粒物的軌跡圖得到了顆粒物在機身周圍的陰影區和密集區厚度.得到主要結論如下:對于本研究中的無人機,在海拔1000m高處,采集PM1,PM2.5,PM10時的氣溶膠采樣頭的最佳安裝位置為機身下部距機頭距離約 42~75cm,采樣頭探頭距機身下部壁面的距離分別應大于4,4,4.3cm,但不超過 26cm(機身下部距地面距離).
FLUENT軟件;最佳安裝位置;氣相數值模擬;DPM顆粒相模擬
氣溶膠會對氣候產生影響,例如影響太陽直接輻射、散射和紫外輻射;影響大氣微量成分的循環;改變能見度;以及引起城市大氣熱狀態的變化,加劇城市熱島效應等[1].此外,大氣氣溶膠危害人體健康,排放的大量的SO2轉化為硫酸鹽,加劇酸雨的形成[2].酸雨會增加土壤酸性、損害植被的生長、污染水體,腐蝕建筑物等[3].
獲得更完整的氣溶膠粒子的時空分布特征,利用飛行器對大氣氣溶膠進行航測具有很大的優勢.PMS 機載探測儀器是當今最先進的自動化粒子測量儀器.20世紀 70年代后期開始在世界各地逐步廣泛采用的云微物理觀測儀器于1981年始引進我國,并逐漸推廣應用于一些省份的人工增雨外場試驗.PMS是可以連續觀測記錄、實時顯示的光電測量系統.它可觀測大氣中直徑從 0.15~6400μm的氣溶膠、云粒子和降水粒子等.機載 PMS 測粒系統是目前大氣氣溶膠的垂直分布特征研究和降水云進行直接觀測分析中使用最廣泛的研究手段[4-7].但是,目前有關PMS粒子探測儀器探頭以及其他在飛機機身外搭載工作儀器的具體位置的理論研究尚少.
為了使得PMS等儀器在飛機上的掛載具有可靠的理論依據,本文將利用FLUENT軟件和離散相模型(Discrete Phase Model, DPM模型)對無人機機身周圍流場及氣溶膠運動軌跡進行模擬,從理論上確定無人機上搭載采樣頭的具體位置.
1 軟件與模型介紹
1.1 ANSYS ICEM CFD軟件
ICEM CFD軟件能夠向用戶提供業界領先的高質量網格技術:邊界層網格自動加密、流場變化劇烈區域網格局部加密、網格自適應用于激波捕捉、分離流模擬、高質量的全六面體網格提高計算速度和精度、非常復雜空間的四、六面體混合網格等. ICEM CFD獨特的采用映射技術的六面體網格劃分功能—通過雕塑方法在拓撲空間進行網格劃分,自動映射到物理空間,可在任意形狀的模型中劃分出六面體網格;其映射技術自動修補幾何表面的裂縫或洞,從而生成光滑的貼體網格.
1.2 FLUENT及控制方程
FLUENT軟件為美國FLUENT 公司所開發的商業 CFD 軟件,可以模擬從不可壓縮流體到高度可壓縮流體的復雜流動問題,采用多種求解方法和多重網格加速收斂技術,能達到很好的收斂速度和求解精度.
基于FLUENT對無人機周圍的流場進行數值模擬,就是應用FLUENT軟件對控制方程在幾何模型(求解域)內結合具體的邊界條件進行求解并將其可視化的過程. 對模型進行求解,首先要將計算域進行離散,即對空間連續的計算域劃分成許多個子區域,并確定每個子區域的節點,從而生成網格;然后,將控制方程在網格上進行離散,即將偏微分格式的控制方程轉化為各個節點上的代數方程組,進而轉化為對方程組的求解,FLUENT采用前處理器ICEM CFD軟件對幾何模型進行離散.
正常條件下,大氣邊界層控制方程包括連續性方程和納維-斯托克斯(Navier-Stokes)方程[8].
連續性方程是質量守恒定律在流體力學中的具體表述形式. 它的前提是對流體采用連續介質模型,速度和密度都是空間坐標及時間的連續、可微函數. 方程式表達如下:

式中:ρ為密度,kg/m3;t為時間;u為速度,u、v和w分別為u在χ、y、z三個方向上的分量,m/s.
對于不可壓縮流體,ρ為常數且不隨時間變化,方程表達式如下:
納維-斯托克斯方程是動量守恒定律描述流體時的運動方程.在χyz三維坐標系中,對于牛頓流體,其表達式如下:
式中:ρ為流體密度;P為微元所受的壓力;Su、Sv和Sw為動量守恒方程的廣義源項.
1.3 離散相模型—DPM模型
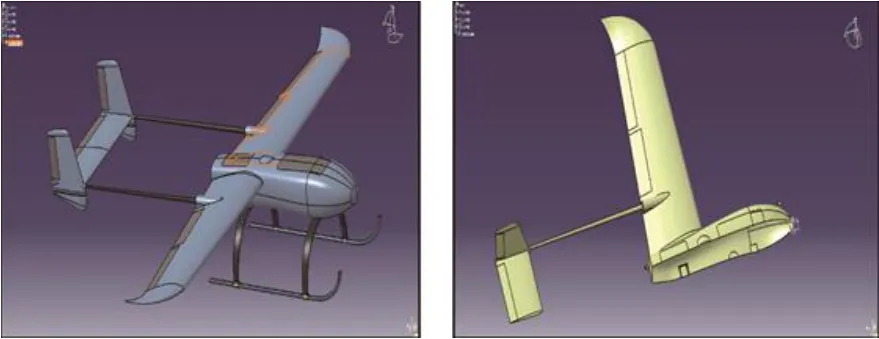
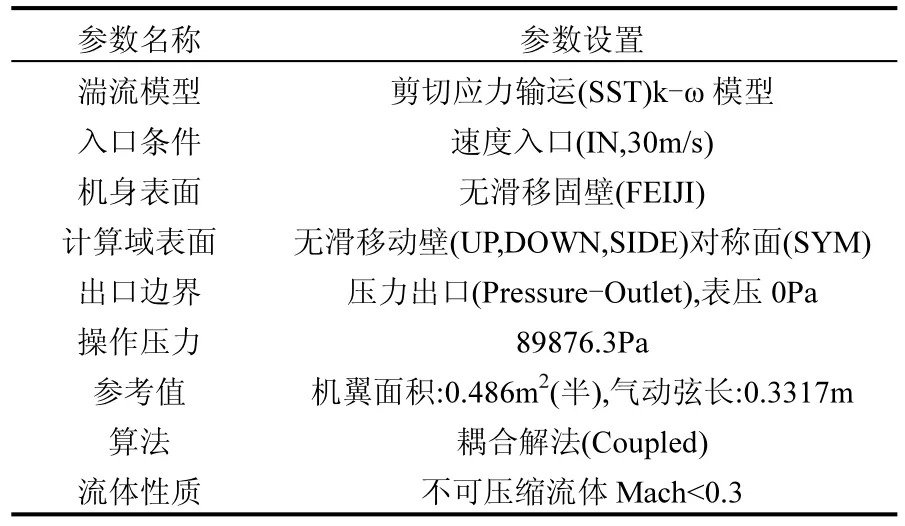
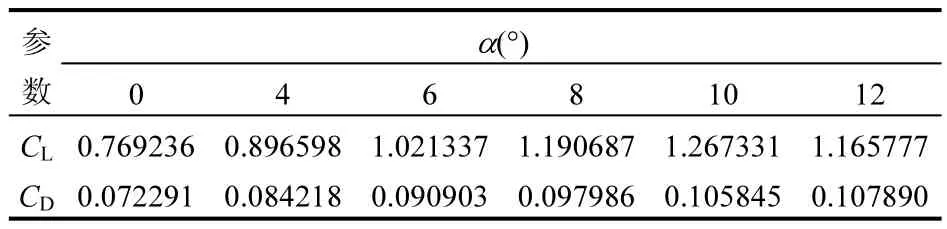
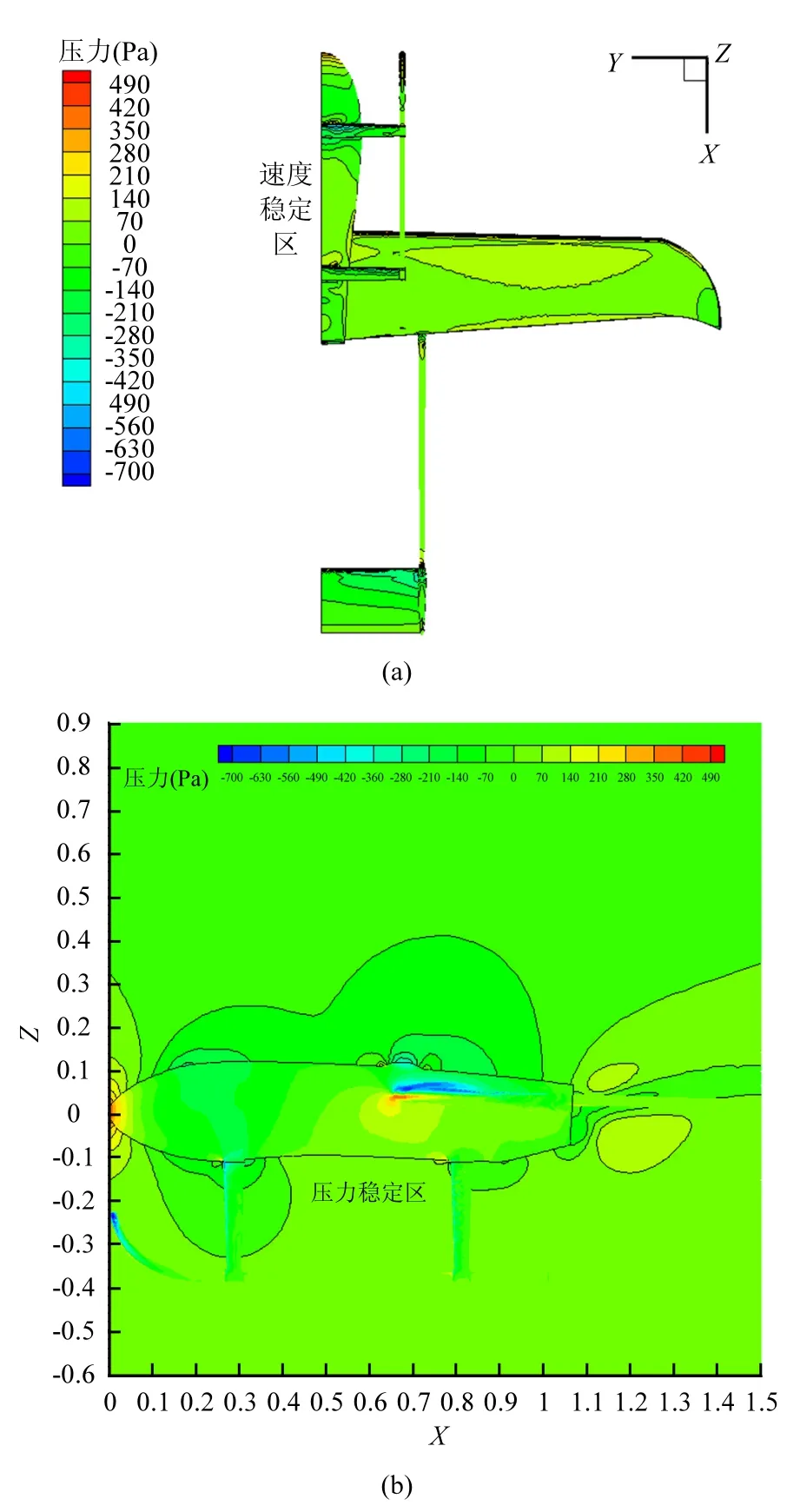
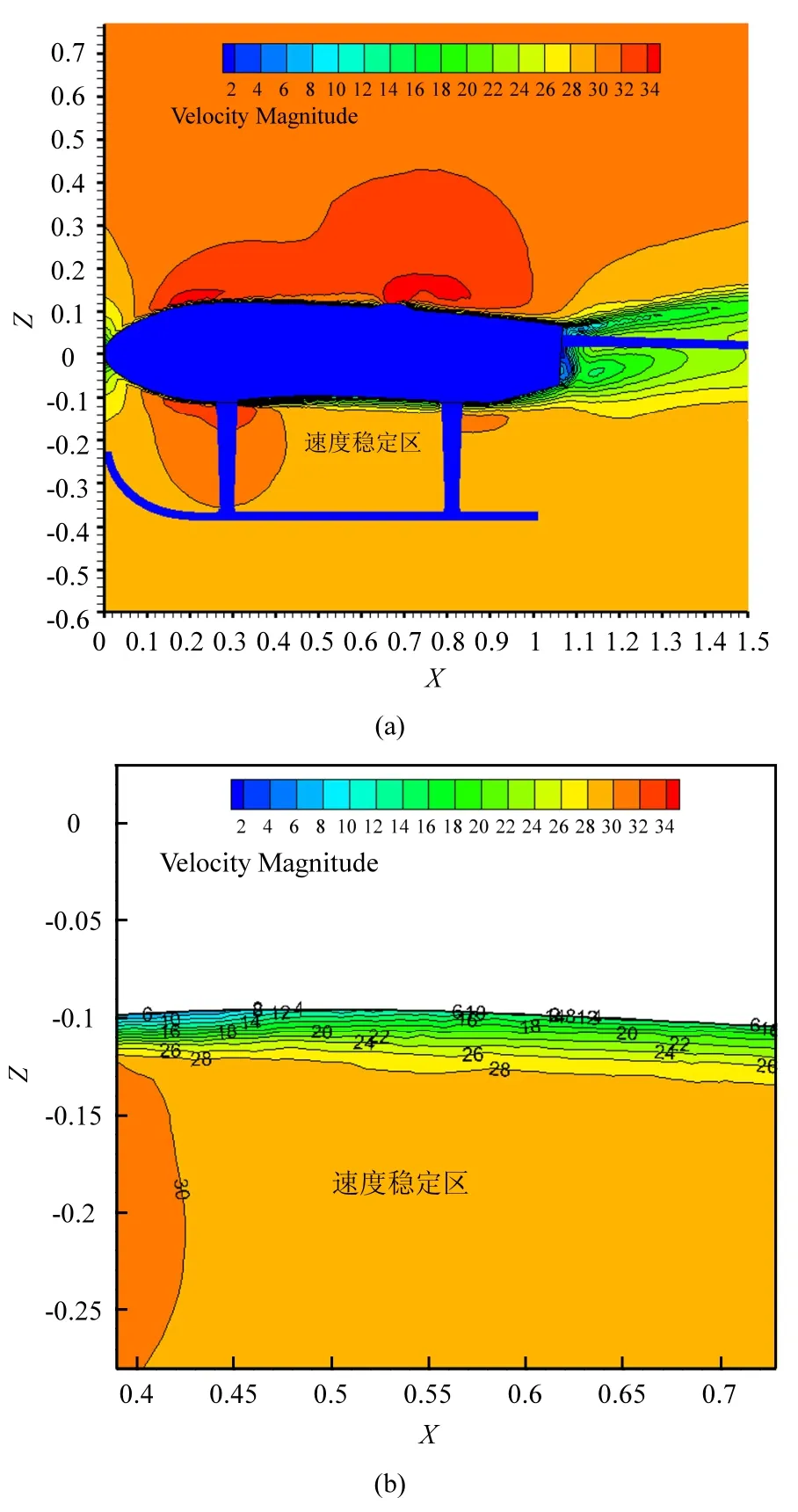
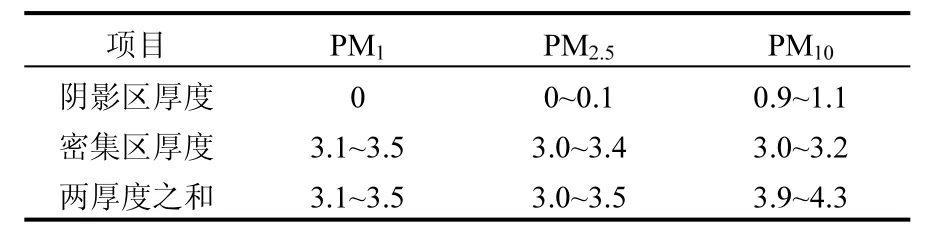
DPM模型是FLUENT軟件中提供的一種非常特殊的模型,用于計算小顆粒、低濃度(體積分數 2.1 幾何模型的確定與網格劃分 無人機模型為后推式固定翼無人機,其主要參數如下:機長:2.3m;機高:66cm;翼展:2.9m;飛行高度:<4000m;巡航速度:80~150km/h;機翼面積0.962m2;平均氣動弦長0.3317m.該無人機模型完全對稱,為了減少計算量、節省計算時間,選擇半模型,如圖1所示. 圖1 無人機全機模型和半模型Fig.1 The full-aircraft and the half-aircraft model 圖2 外場邊界網格(a)和機身(b)面網格Fig.2 The boundary meshes of flow field and the face meshes of fuselage 把無人機半模型導入ICEM CFD前處理軟件,劃分流場區域,流場選取前后約為飛機外形長度的20倍,上下左右各約為20倍翼展構建流場區域.將無人機及外場劃分為7個部分,無人機機身定義為FEIJI,矩形外場各個面分別定義為IN, OUT, UP,DOWN,SIDE,SYM(對稱面). 利用非結構網格劃分方法對無人機及流場進行網格劃分,如圖 2,網格數量分別為:面網格(機身 FEIJI):212280;體網格(外場 FLUID): 7952872;邊界層網格:第一層網格高度為0.015(≈弦長×10-5),增長率為1.2,共20層;總網格數量:8219943. 2.2 湍流模型的選擇 計算高度選為距海平面 1000m,此高度下空氣壓強為 89876.3Pa,空氣密度 ρ=1.11166kg/m3,動力黏度μ=1.75785×10-5Pa·s. 雷諾數計算公式為: 式中:L為特征長度,取參考弦長;ρ為流體密度;μ為流體的黏性系數;v為平均流速. 模擬無人機在本計算狀態下的雷諾數為:Re=6.293×106,顯然計算模型對應的流動為湍流. 馬赫數(Mach,簡稱 M)是衡量空氣壓縮性最重要的參數,飛機的 Mach數是指飛機的飛行速度與當地大氣(即一定高度、溫度和大氣密度)中的音速之比,即: 式中:V為飛機的飛行速度,m/s;a為當地大氣中的音速,m/s. 飛行器速度在Mach0.3以下可認為是低速,可以不考慮空氣壓縮影響.本次模擬中的材料為空氣,飛機飛行速度為30m/s,海拔1000m高處的音速為336.435m/s,Mach為0.089,因此本次模擬中的空氣可以認為是不可壓縮的. 剪切應力輸運k-ω模型,簡稱SST k-ω模型,綜合了k-ω模型在近壁區計算和k-ε模型在遠場計算的優點,將k-ω模型和標準k-ε模型都乘以一個混合函數后再相加就得到此模型. SST k-ω模型和標準k-ε模型相似,但SST k-ω模型比標準 k-ε模型在廣泛的流動領域中有更高的精度和可信度. k-ω模型在預測近壁區繞流和旋流方面有優勢[11].因此,湍流模型選為剪切應力輸運k-ω模型. 2.3 邊界條件及主要參數的設置 在模擬過程中,FLUENT中的邊界條件及主要參數的設置見表1. 表1 模擬中邊界條件及主要參數的設置情況Table 1 Boundary conditions and main parameters in numerical simulation 3.1 FLUENT軟件模擬的驗證 本實驗計算了不同迎角(α)下的飛機氣動力參數(升力系數 CL,阻力系數 CD),從理論角度驗證了數據的合理性,計算結果的部分數據見表2. 表2 不同迎角下的飛機氣動力參數計算結果Table 2 The simulated result of the aerodynamic parameters under different angles of incidence 由表 2可見,隨著迎角的增加,升力系數逐漸增加,當超過臨界角(最大升力系數所對應的迎角)時,迎角繼續增大,升力系數將急劇降低,本實驗中臨界迎角為 10°.對于阻力系數,在小范圍內時,隨著迎角的增加,阻力系數增加緩慢,迎角比較大時,迎角增加,阻力系數增加較快,當接近臨界迎角時,迎角增加,阻力系數急劇增加,阻力系數永遠不會為 0,也就是飛機的阻力始終存在.由以上數據說明本次模擬數據在理論上是合理的. 3.2 氣相模擬結果 利用Tecplot360后處理軟件對0°迎角模擬收斂的結果進行處理,得到無人機機身及周圍流場的壓力分布圖和速度分布圖,如圖3,圖4所示. 圖3 無人機機身下部(a)及對稱面上(b)的壓力分布Fig.3 Pressure distribution of the bottom of UAV fuselage and symmetry plane 在選擇采樣頭的安裝位置時,所選位置的壓力分布和速度分布都需要穩定,壓力值應盡可能與氣溶膠采集高度上的壓力值相等,速度與飛機的飛行速度近似.在這種情況下才能使得采集到的氣溶膠樣品具有代表性. 由圖3和圖4可以判定滿足以上條件的最佳候選位置為機身下面部分. 由圖 3(a)可以看出,機身下部壓力穩定區域位于距機頭 40~75cm 的范圍內,并且表壓為0~70Pa,壓力值與 1000m高處的壓力值接近.由圖 3(b)可以看出,流場對稱面上的壓力分布在距機頭約 42.1~76.7cm 的范圍內分布穩定,且表壓為0~100Pa,壓力值與1000m高處的壓力值接近.圖 4為流場對稱面上速度云圖與速度矢量圖,距離機身腹部壁面大于 4.0cm部分為速度穩定區域,該區域距機頭約42~77cm. 圖4 機身周圍對稱面(SYM)上的速度分布Fig.4 Velocity distribution of the symmetry plane around the UAV fuselage 綜合以上對壓力分布和速度分布的分析,在海拔1000m高處,在不考慮顆粒物軌跡的情況下采樣頭的最佳安裝位置為機身腹部距機頭距離約42~75cm的范圍內,采樣頭距離機身壁面距離應大于4cm. 前人研究也表明,飛行器采樣頭的最佳安裝位置包括每個機翼的中心下面,機身下面,機身上部機翼后緣之前駕駛艙之后(有人機)和延伸到機頭前的氣流中,這些位置最小化了翼尖渦流、機頭和機身的擋風板區域引起的氣流畸變[12].因此,最佳安裝位置在機身下面部分是合理的. 3.3 離散相數值模擬 飛行中的無人機附近的流速和顆粒物的分布與自由流不同,當氣流流線被飛行中的無人機引發變形時,一般來說,比較小的粒子大部分會沿著流線運動,而比較大的粒子不再沿著確切的路徑運動,這導致了“陰影區”--貼近機身的區域;偏離軌跡的粒子聚集的區域形成“密集區”--陰影區外面的區域.粒子在密集區濃度比自由流中的偏高,而陰影區的濃度為 0[13].在實際情況中,大氣中的氣溶膠顆粒還要受到自身重力等因素的影響,因此為了得到更加準確的采樣頭的安裝位置,在收斂的氣相流場基礎上對有重力的顆粒物的運動軌跡進行了模擬. 以 0°飛行迎角進行模擬得到收斂的氣相流場之后,激活DPM模型,對顆粒物的軌跡進行模擬. PM10是懸浮顆粒物中對環境和人體健康危害最大的一類,可進入鼻腔;PM2.5可進入肺部; PM1則可深達肺泡并沉積,進而進入血液循環,可能導致與心肺功能障礙有關的疾病.因此在顆粒物的研究中,主要集中在粒徑為 1μm[14-17]、2.5μm[18-21]、10μm[22-25]的粒子. 為了得到具有代表性的模擬結果,在模擬中,選擇 1,2.5,10μm 的粒子在飛機前端以飛機飛行速度(30m/s),按空氣流動方向(即向機尾方向)模擬釋放.依照慣性理論,顆粒物會受到周圍流場的作用在貼近機身表面呈現不同的密度分布,可得到顆粒在縱剖面分布情況.不同粒徑顆粒物釋放后在對稱面上的運動軌跡(圖中一條線代表一個粒子的軌跡)如圖5所示. 圖5 不同粒徑的顆粒物的運動軌跡Fig.5 The trajectories of different sizes of particulate matters 利用DPM模型模擬從速度入口處釋放不同粒徑的粒子,并得到這些粒子在機身周圍的顆粒物密集區和陰影區厚度.機身下部顆粒物軌跡陰影區與密集區匯總如表3所示. 表3 不同粒徑顆粒物陰影區與密集區厚度(cm)Table 3 The thickness of shadow zones and enhancement regions of different sizes of particulate matters(cm) 通過分析可得出,由于粒徑≤10μm的粒子重力作用比較小,與壁面分離距離很小,往往會貼著機身壁面運動,形成一層比較薄的密集區域.釋放顆粒物粒徑為 1、2.5μm 時,陰影區的厚度很小,基本可以忽略,但隨著釋放顆粒物粒徑的增加(10μm),顆粒物的重力也不斷的增大,陰影區的厚度也有明顯的增加,在釋放 PM10時陰影區最大厚度能達到 1.1cm;對于密集區的厚度變化卻不明顯,厚度在3.0cm左右. 在選擇安裝采樣頭的位置時應避開陰影區與密集區,由表 3可以看出采集不同粒徑的顆粒物時,采樣頭的探頭與機身下部壁面的距離不同,采集PM1時,采樣頭探頭與機身下部壁面的距離最小為 3.5cm;采集 PM2.5時,采樣頭探頭與機身下部壁面的距離最小為3.5cm;采集PM10時,探頭與機身壁面的距離應大于 4.3cm,這樣才能使得采集區處于顆粒物運動穩定區.由于著陸時機身距地面約為 26cm,因此采樣頭安裝位置在機身下部不得超過26cm. 以上數值模擬結果在理論上得到了采樣頭的安裝位置,該模擬結果將在風洞實驗進行驗證,并得到更加具體和合適的采樣頭安裝位置. 根據對氣相模擬結果的分析,在海拔 1000m高處,滿足氣溶膠采樣頭探頭安裝條件的位置為機身下部距機頭約42~75cm的范圍內,距離機身下部壁面大于4cm.而根據顆粒相的模擬結果,采樣頭探頭距離機身下部壁面的距離在采集PM1、PM2.5、PM10時分別應大于3.5,3.5,4.3cm. 綜合以上兩種模擬結果,可以得出在海拔1000m高處,采集PM1、PM2.5、PM10時的氣溶膠采樣頭的最佳安裝位置為機身腹部距機頭距離約 42~75cm,采樣頭探頭距機身下部壁面的距離分別應大于4,4,4.3cm,但不超過26cm. [1]王明星.氣溶膠與氣候 [J]. 氣候與環境研究, 2000,5(1):1-5. [2]任麗新,游榮高,呂位秀,等.城市大氣氣溶膠的物理化學特性及其對人體健康的影響 [J]. 氣候與環境研究, 1999,4(1):67-73. [3]閆百瑞,王永平.酸雨的危害及其控制淺析 [J]. 北方環境,2011,23(3):74-76. [4]孫 霞,銀 燕,孫玉穩,等.石家莊地區春季晴、霾天氣溶膠觀測研究 [J]. 中國環境科學, 2011,31(5):705-713. [5]范 燁,郭學良,付丹紅,等.北京及周邊地區2004年8,9月間大氣氣溶膠分布特征觀測分析 [J]. 氣候與環境研究, 2007,12(1): 49-62. [6]Zhang Q, Ma X, Tie X, et al. Vertical distributions of aerosols under different weather conditions: Analysis of in-situ aircraft measurements in Beijing, China [J]. Atmospheric Environment, 2009,43(34):5526-5535. [7]黃海燕,鄭國光.北京地區春季氣溶膠分布特征的個例分析 [J].氣象, 2009,35(7):3-9. [8]張師帥.計算流體動力學及其應用-CFD軟件的原理與應用[M]. 武漢:華中科技大學出版社, 2011:5-8. [9]蔣海華.旋風分離器大渦數值模擬及分離性能研究 [D]. 長沙:中南大學, 2009. [10]薛 元,姚 強,張金成.水平直管道中氣體-顆粒兩相流實驗研究 [J]. 熱能動力工程, 2003,18(103):39-42. [11]李鵬飛,徐敏義,王飛飛.精通 CFD工程仿真與案例實戰 [M].北京:人民郵電出版社, 2011:124-126. [12]Kulkarni P, Baron P A, Willeke K. Aerosol measurement: principles, techniques, and applications [M]. John Wiley and Sons, 2011,606-608. [13]Twohy C, Rogers D. Airflow and water-drop trajectories at instrument sampling points around the Beechcraft King Air and Lockheed Electra [J]. Journal of Atmospheric and Oceanic Technology, 1993,10:566-579. [14]Crilley L R, Ayoko G A, Morawska L. Analysis of organic aerosols collected on filters by Aerosol Mass Spectrometry for source identification [J]. Analytica Chimica Acta, 2013,803:91-96. [15]薛 蓮,孫 杰,林 云,等.深圳冬季霾日的大氣污染特征 [J].環境科學研究, 2011,24(5):505-511. [16]黃元龍,楊 新.大氣細顆粒物對大氣能見度的影響 [J]. 科學通報, 2013,58(13):1165-1170. [17]謝 敏,岳玎利,區宇波,等.珠三角夏秋季節大氣顆粒物與碳黑氣溶膠污染特征的研究 [J]. 環境科學與管理, 2013,38(6):162-166. [18]Hyo C. Trapping effect of a calm zone by Lee side-internal gravity waves and cyclonic winds on sudden high concentrations of particulate matters combined with the yellow dusts from Gobi Desert in the Korean Eastern Coast [J]. Disaster Advances, 2013,6(11):101-111. [19]姚振坤,馮 滿,呂森林,等.上海城區和臨安本底站PM2.5的物化特征及來源解析 [J]. 中國環境科學, 2010,30(3):289-295. [20]余學春,賀克斌,馬永亮,等.北京市PM2.5水溶性有機物污染特征[J]. 中國環境科學, 2004,24(1):54-58. [21]戴 偉,高佳琪,曹 罡,等.深圳市郊區大氣中PM2.5的特征分析[J]. 環境科學, 2012,33(6):1952-1957. [22]Giorio C, Tapparo A, Scapellato M L, et al. Field comparison of a personal cascade impactor sampler, an optical particle counter and CEN-EU standard methods for PM10, PM2.5and PM1measurement in urban environment [J]. Journal of Aerosol Science, 2013,65:111-120. [23]周家斌,王鐵冠,黃云碧,等.北京部分地區大氣PM10中多環芳烴的季節性變化 [J]. 中國環境科學, 2005,25(1):116-120. [24]錢冉冉,閆景明,吳水平,等.廈門市冬春季灰霾期間大氣PM10中多環芳烴的污染特征及來源分析 [J]. 環境科學, 2012,33(9): 2939-2945. [25]呂森林,邵龍義,吳明紅,等.北京城區可吸入顆粒物(PM10)的礦物學研究 [J]. 中國環境科學, 2005,25(2):129-132. Numerical simulation of the optimal placement of aerosol sampling-head on an unmanned aerial vehicle ZHANG Jing, ZHANG Shi-jian, ZHU Zhen-yu, ZHANG Ya-fei, JI Ya-qin*(College of Environmental Science and Engineering, Nankai University, Tianjin 300071, China). China Environmental Science, 2014,34(9):2192~2198 CFD software was applied to simulate the optimal placement of fixed-wing UAV which flew at the altitude of 1km with a speed of 30m/s. Mesh generation was carried out for the UAV model via the pre-processing software ICEM CFD. Furthermore, the FLUENT software and the DPM model in it were used for simulating the gas phase (continuous phase) and particle phase (dispersed phase). The DPM model simulated the trajectories of particulate matters of different sizes (1,2.5,10μm) which were released from the direction of the velocity inlet at the speed of 30m/s. The simulation results provided the thickness of shadow zones and enhancement regions. The main results indicated that: for this kind of unmanned aerial vehicle (UAV) with the altitude height of 1km, the aerosol sampling-head, which was for the purposes of gathering PM1, PM2.5and PM10should be installed on the bottom of the UAV and be about 42.1cm to 75cm away from the nose. The probe of sampling head for gathering PM1, PM2.5and PM10should be 4, 4, 4.3cm away from the bottom, respectively, but no more than 26cm. FLUENT software;optimal placement;numerical simulation of gas phase;DPM model X51 A 1000-6923(2014)09-2192-07 張 靜(1988-),女,山東樂陵人,南開大學博士研究生,主要從事大氣顆粒物污染防治理論與技術研究. 2014-05-07 國家重大科學儀器設備開發專項(2011YQ060111) * 責任作者, 副教授, jiyaqin@nankai.edu.cn2 模擬方案



3 模擬的驗證與結果討論
4 結論
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
軍事文摘(2023年10期)2023-06-09 09:15:06
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
環境保護與循環經濟(2017年2期)2017-09-26 11:52:22
光學精密工程(2016年6期)2016-11-07 09:07:19
河北書畫研究(2016年2期)2016-08-24 02:14:50
新農業(2016年18期)2016-08-16 03:28:27
化工進展(2015年3期)2015-11-11 09:18:15
浙江大學學報(工學版)(2015年1期)2015-03-01 01:17:28
