帶有擁擠程度指示的圖形化公交站牌設計
2014-08-05 04:28:37鮮曉東唐云建袁宇鵬
計算機工程 2014年5期
關鍵詞:檢測
鮮曉東,姜 鵬,唐云建,袁宇鵬
(1. 重慶大學 a. 信息物理社會可信服務計算教育部重點實驗室;b. 自動化學院,重慶 40004 4;2. 重慶市科學技術研究院,重慶 40004 4)
帶有擁擠程度指示的圖形化公交站牌設計
鮮曉東1a,1b,姜 鵬1b,唐云建2,袁宇鵬1b
(1. 重慶大學 a. 信息物理社會可信服務計算教育部重點實驗室;b. 自動化學院,重慶 40004 4;2. 重慶市科學技術研究院,重慶 40004 4)
針對當前智能公交系統中電子站牌缺少車內擁擠程度顯示的問題,設計全新的圖形化公交站牌,提出一種基于超聲波技術的擁擠程度檢測方法。結合超聲波測距、全球定位系統和通用分組無線服務技術改進傳統車載終端,通過超聲波測距確定各個超聲波傳感器下是否有乘客站立,對檢測到乘客站立的傳感器數量進行統計,以此推斷車內的擁擠程度。設計開發圖形化公交站牌,實現擁擠程度實時檢測、行車路線實時標注和到站距離預測等功能。實驗數據表明,該系統可靠性高,能準確反映車內擁擠程度,直觀顯示車輛位置,準確預測到站距離,滿足智能公交系統的要求。
智能公交系統;超聲波測距;全球定位系統;通用分組無線服務;電子公交站牌;多線程
1 概述
為解決日益嚴重的交通擁擠和能源消耗問題,貫徹公交優先的發展戰略,智能公交系統(Intelligent Transportation System, ITS)應運而生,并逐漸成為國內外研究的一個熱點。目前智能公交系統一般由智能車載終端、調度中心和電子站牌組成[1-2]。其中,智能車載終端和電子站牌是該系統的核心,是公交系統實現智能化的基礎,也是本文研究的主要內容。傳統的車載終端主要包括主控制器、GPS(Global Positioning Sy stem)模塊和GSM(Global System o f Mob ile Communication)/GPRS(General Packet Radio Service)通信模塊[3]。后來在此基礎上利用紅外檢測技術,對人數進行統計,但該方法容易受到干擾造成誤差[4-5]。針對上述不足,有學者采用前門統計打卡次數、后門紅外檢測的方法統計人數,但該方法對有人售票車無法適用,且沒有解決車門紅外易受干擾的問題[6]。針對傳統站牌只能顯示站名的弊端,一種基于單片機和LED燈的電子站牌逐漸投入使用[7],該站牌可以顯示車輛的到站情況,但不夠直觀且沒有對公交車到站進行預測,達不到智能公交的要求。有學者提出了一種公交到站時間的預測方法,但由于實際道路情況復雜,仍存在一定偏差[8-9]。目前,最常見的智能公交系統方案是將GPS、GPRS和GIS(Geographic Information System)技術相融合,實現車輛定位信息的采集、收發和顯示[10-11],但沒有對電子站牌作深入的研究,所以普通乘客無法直觀地了解公交車的行駛信息。
本文針對上述不足,對帶有GPS和GSM/GPRS的車載終端[12]加以改進,采用超聲波技術,通過測距來判斷傳感器下方是否有乘客站立,判斷車內擁擠程度,并設計一種全新的圖形化公交站牌。該站牌集公交車擁擠程度實時采集、行駛位置實時顯示和到站距離實時預報等功能于一體。
2 系統描述
智能公交系統在運行過程中由車載終端的GPS模塊實時采集公交車的位置信息,超聲波模塊組檢測車內擁擠程度,MCU(Micro Control Unit)將上述信息和其他行駛信息編碼打包,通過車載終端上的GPRS模塊發送,經無線移動通信網絡(GPRS網)上傳到公交管理系統的通訊服務器,調度中心對接收的數據進行綜合處理后存儲并轉發至所需的各個公交站牌。圖形化公交站牌通過網絡接收到車輛行駛信息后,經過數據解包將所需信息分別傳遞給各個顯示模塊,以此實時顯示該站點每一路公交車的位置信息、到站距離和車內擁擠程度等。系統結構如圖1所示。
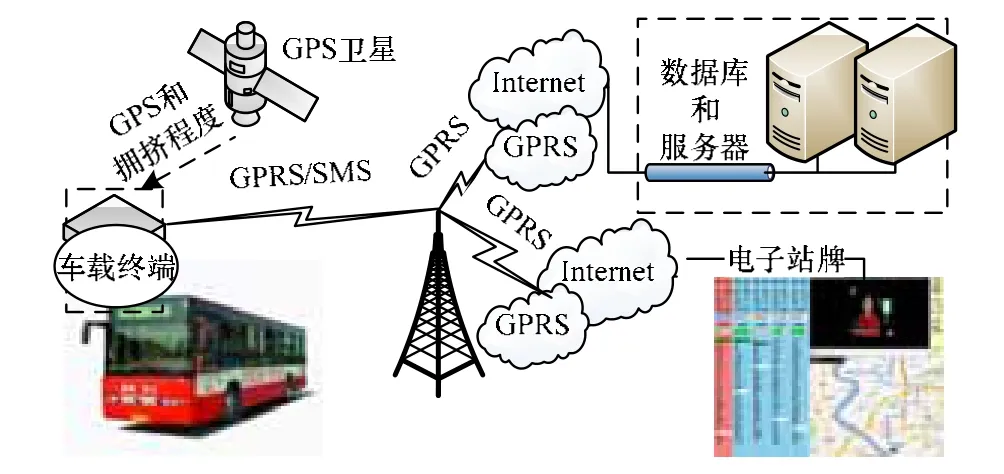
圖1 智能公交系統結構
3 車載終端的設計
車載終端主要包括主控制器、超聲波檢測系統、GPS模塊、通信模塊、LCD(Liquid Crystal Display)、鍵盤和電源模塊等。硬件結構如圖2所示。
主控制器選用基于ARM Cortex-M3內核的STM32F103,它具有高性能、易開發的特點,能滿足本系統低成本、低功耗、高可靠、多外設等要求。
3.1 超聲波檢測系統
與普通的車載終端不同的是,文中智能公交系統的車載終端增加了超聲波檢測系統,用于檢測公交車上的擁擠程度。該檢測系統由9塊HC-SR04超聲波測距模塊組成,此模塊性能穩定,探測距離為2 cm~450 cm,精度可達0.2 cm。
超聲波測距原理是根據超聲波發射裝置發出超聲波,接收器接到超聲波的時間差計算距離。超聲波在空氣中的傳播速度約為340 m/s,根據計時器記錄的時間t,就可以計算出發射點距障礙物的距離s,即:s=340t/2。
在公交車上根據乘客站立時的習慣與可站立的位置,分別在車頂和車門的不同位置安放超聲波檢測模塊。硬件安裝完畢后設定閾值。在工作狀態中通過檢測車頂與車內地面的距離變化來判斷是否有人站立。若超聲波檢測模塊檢測到車頂與地面距離小于閾值則表明該模塊檢測范圍內有人站立。由于車門處與車頂處安放的檢測模塊高度不同,因此閾值也不相同。經實驗測得車頂閾值設為200 cm,車門閾值設為150 cm最能反映車內實際情況。假設在工作過程中過道頂端的模塊檢測到車頂與地面距離為30 cm,小于閾值(即小于200 cm),則表明該模塊下方有乘客站立。車門處的工作模塊也是同理。車頂和車門的檢測模塊設定閾值如表1所示。

表1 超聲波模塊閾值
通過對9個模塊檢測到數據的分析判斷來推斷公交車內的乘客擁擠狀況。系統設定當9個模塊中有0個~ 3個模塊測得有人站立時,擁擠程度為“輕”;當4個~6個模塊測得有人站立時為“中”;當7個~9個模塊測得有人站立時為“滿”。
3.2 GP S數據采集模塊
GPS數據采集模塊所用的GR-87是SIRF第3代高靈敏度、低耗電量芯片StarIII,具備快速定位及追蹤20顆衛星的能力。主要負責實時采集車輛的經度、緯度和速度等信息。STM32主控制器通過串口通信接收到GPS數據,提取相關信息。
3.3 通信模塊
通信模塊采用的SIM300芯片是一款體積小巧的4頻GSM/GPRS模塊,內嵌TCP/IP協議棧,可實現語音、SMS (Short Message Service)、數據和信息的高速傳輸。該模塊主要負責GPRS通信,將車輛信息傳至網絡。主控制器通過串口通信對SIM300進行相關控制,使用AT指令設置相關網絡參數,實現發送、接收功能。
3.4 LC D模塊和4×4鍵盤
LCD模塊采用128×64液晶屏顯示車輛到站信息和當前時速等,供駕駛員參考。顯示屏采用64×128點陣LCD,根據軟件中選取字庫大小,可同時顯示4行共32個漢字,滿足實際需求。
4×4鍵盤是用4條I/O線作為列線,4條I/O線作為行線組成的鍵盤。在列線和行線的每一個交叉點上,放置一個按鍵。這樣鍵盤中按鍵的個數是4×4共16個,滿足實際需要。同時這種行列式鍵盤結構有效地提高了主處理器的I/O口利用率。
4 圖形化公交站牌的設計
圖形化公交站牌所用的載體為LED(Large Elec tronic Display)液晶顯示屏。軟件結構采用C/S模式,利用Socket和多線程編程技術通過網絡與公交車車載終端進行通信,并完成車輛監控、車內信息顯示等功能。該站牌由公共信息顯示模塊、車輛信息顯示模塊、公交線路圖顯示模塊和廣告信息模塊組成。各個顯示模塊將數據包中提取出來的信息直觀地顯示給乘客,使乘客了解公交車具體行駛狀況。
4.1 各個顯示模塊的設計
根據圖形化公交站牌設計思想和各功能模塊的要求,以直觀、美觀、簡潔大方為主旨,界面的設計模塊如圖3所示。

圖3 電子站牌界面模塊
公交站牌的主要顯示模塊有:
(1)公共信息顯示模塊:主要顯示日期、時間、氣溫、公告等基本信息。
(2)車輛信息顯示模塊:顯示距離本站最近的3輛公交車的擁擠狀況和行駛位置等信息。計算并比較得出最近一輛公交車距離本站的距離。以文字和圖標的形式直觀地顯示給等候的乘客,使乘客及時選擇合適的出行方式。
(3)公交線路圖顯示模塊:所有經過本站點的公交車,都會以線路圖的形式顯示在屏幕上, 并且根據系統的設定,每隔一定的時間(如10 s)更換一次線路圖片。在線路圖上,乘客不僅可以了解本路線車輛途徑的所有站點,而且還可以看到本站所處在整個線路的位置,即將到站的3輛公交車的行駛位置等。對于明顯的地標式建筑物還會在線路圖上加以標注,給不熟悉線路的乘客以參考。
(4)廣告信息模塊:循環播放贊助商的廣告。此模塊不僅為乘客緩解了等車時的焦急心情,也為公交集團增加了收入,還可以在線直播重大時刻的歷史性事件,為市民提供方便。
4.2 各模塊軟件實現及算法設計
圖形化公交站牌的系統軟件是在Windows 7環境下,基于Visual Studio 2010開發工具,采用C#語言開發的。站牌的軟件設計流程如圖4所示。

圖4 軟件設計流程
公共信息顯示模塊和廣告信息模塊主要采用C#中已設計好的控件,如textbox控件、timer控件、視頻播放控件等,通過修改屬性、邏輯控制來實現功能。所顯示的信息均為socket通信所接收的信息。
車輛信息顯示模塊主要是預測到站距離,其算法如下:
已知球面上AB兩點的球面距離計算公式為:

其中,A,B球坐標為(jA,ωA),(jB,ωB);R為球面半徑。
假設地球是一個完美的球體,則它的半徑為地球的平均半徑,記為R,即6 371.004 km。假設公交車行駛路段兩點中。第1點A的經緯度(LonA, LatA),第2點B的經緯度為(LonB, LatB),并且東經為正,西經為負,北緯為正,南緯為負。可以得到兩點直線距離如下:

則弧長l即實際行駛距離為:

則站牌上顯示的距離本站的距離應為:


公交線路圖模塊實時動態顯示車輛行駛位置是利用像素點與經緯坐標間比例實現的。經緯度分別對應像素點的X、Y坐標值。利用所求點經緯度與標準點經緯度坐標之差,根據標準點的X、Y坐標值,求得所求點的X、Y坐標值。
具體過程分為2步:
(1)根據已知的GPS數據在線路圖上獲得對應的2個標準點像素坐標(xa,ya)和(xb,yb),通過比例計算獲得每個經度變化值所對應的坐標變化值Δx,以及每個緯度變化值所對應的坐標變化值Δy。
(2)在公交站牌實際運行過程中把獲得的實時經緯度數據(lon, lat)按照以下公式計算。獲得車輛圖標相對電子地圖的X、Y坐標值。修改圖標位置屬性,達到車輛圖標動態顯示的效果。

其中,LON,LAT為基準點的經緯度;xa,ya為基準點的X,Y坐標值。
4.3 公交站牌的通信協議設計
電子站牌采用固定IP與服務器建立鏈接后接收數據。命令幀結構如圖5所示,其中,前導碼采用2個字節的FFFF表示;幀尾采用CRC校驗位對數據進行校驗;幀頭幀尾之間為有效數據,依次是:公交車的線路如“832”,由2個字節表示;公交車車牌號,只取字母數字部分如“A46583”,由3個字節表示;車輛行駛狀態,“1”表示正常,“0”表示異常,由1個字節表示;車輛的GPS數據和擁擠狀況等行駛信息的大小為4 Byte~256 Byte。

圖5 命令幀結構
5 實驗與結果分析
本實驗中站牌為重慶市石門站,GPS數據和行車線路圖采用途徑本站的832、821和801這3輛公交車。擁擠程度測試在車型為CKZ6858TB的公交車上進行,該車型最大承載人數(包括駕駛員、站、坐的所有乘客)為50人,配置27個座位,可站立23人。實驗中共有23人參加,實驗假定公交車座位已全部坐滿,因此,參加實驗的23人全部作為站立的乘客參加測試。
5.1 圖形化公交站牌界面
圖形化公交站牌效果如圖6所示。右下角線路圖每10 s切換一次。當切換到某一列線路,如832,則該線路的底色變為淺色,其他線路底色為深色。線路圖上有3個巴士閃爍圖標動態顯示最近的3輛公交車的行駛位置。線路圖中深色文字框標志本站在此線路的位置。站牌左側共有5列線路的站名。每一列站牌分別顯示本路線車輛的到站距離、車內擁擠狀況和車輛到站信息等。白底色的站名為本站的站名,較深底色的站名為最近的一輛公交車行駛到的站名。方框中數字為最近的一輛公交車距離本站的距離,單位為m。方框下面的深色動態條顯示車內的擁擠程度,車內越擁擠,動態條越長。站牌的右上角是廣告和公共信息模塊,循環播放廣告和公共信息。

圖6 圖形化公交站牌
5.2 車內超聲波檢測模塊組
擁擠程度檢測系統共由9個超聲波模塊組成。本實驗在公交車前門、后門各安裝一個超聲波傳感器,剩下7個安放在過道頂端,安裝完畢后按照表1設定閾值。實物安裝如圖7所示。

圖7 實物安裝
實驗設定當有0~8人站在公交車時,公交車擁擠程度為“輕”;9人~18人站立時,擁擠程度為“中”;19人~23人時,擁擠程度為“滿”。而系統工作時當超聲波模塊組中有0~3個模塊檢測到有人站立時公交車擁擠程度為“輕”;4個~6個模塊檢測到有人站立時,擁擠程度為“中”;7個~9個模塊檢測到有人站立時,擁擠程度為“滿”。系統在不同日期時間和不同環境下共進行了20組實驗,部分統計結果如圖8所示。

圖8 部分統計結果
每一組實驗各進行50次測試,在本組實驗中車內人數不變,乘客隨意變換位置,每次更改位置后記錄并統計測試結果。白、灰、黑柱體分別代表本組實驗中檢測擁擠度為“輕”、“中”、“滿”的次數。比如實驗2中共有10人參加,按照設定標準,車內擁擠程度應為“中”,該組實驗時,這10人隨意更改站立位置,記錄每次測試的結果,最后統計得出共有47次測試結果為“中”(如圖8實驗2),即本組50次測試中有47次系統做出了正確判斷。由柱形圖可看出,絕大部分的測試結果與實驗既定條件一致。這表明超聲波系統檢測車內擁擠程度不受外部干擾,能夠準確地檢測出車內擁擠程度,經計算可知其正確率達到96.4%。表2截取了實驗2(車上共10人站立)的10組數據。

表2 部分實驗結果
在表2中,前門、后門、過道分別代表站立人數,結果一欄中括號內表示檢測到傳感器下有人站立的超聲波傳感器個數。由表中測試結果和設定的擁擠程度標準做對比可知,擁擠程度檢測系統能正確實時地反映車內的擁擠狀況,比如第2組數據中,前門站立0人,后門站立1人,過道站立9人時,系統通過返回的數據分析得知有6個傳感器模塊檢測到有人站立,所以應為“中”度擁擠程度,符合前面設定的擁擠程度標準,結果準確。實驗中所存在的誤差是由于有時候乘客的站立位置比較特殊造成的,比如第8組實驗數據產生誤差是因為7名乘客擠在前、后車門,過道只站3名乘客。而在實際情況中這種情況出現的可能性比較小,所以不影響系統的準確性。
綜上所述,超聲波檢測擁擠程度不受外部因素干擾,系統運行穩定,結果準確,能反映實際車內的擁擠程度。圖形化電子站牌能夠將檢測到得車內擁擠程度,實時地顯示給乘客,并且能夠在線路圖上實時顯示公交車的行駛位置,預測到站的距離。整個系統達到了智能化和信息化水平,有助于智能公交系統的發展。
6 結束語
本文在傳統車載終端的基礎上加以改進,采用超聲波技術,通過超聲波測距的方法檢測車內乘客站立的情況,主控制器根據返回數據對車內擁擠程度做出判斷,并將信息傳輸給電子站牌。圖形化公交站牌通過網絡接收到數據經拆包提取信息和相關步驟后,將車內擁擠程度和車輛行駛位置等信息直觀地顯示給廣大乘客,并對到站距離作出預測,提高了公交服務水平。系統在公交車上經過多組的實驗,結果表明系統能實時檢測出公交車內人數變化,對公交車的擁擠程度做出正確判斷。目前本文的人數檢測系統是定性地顯示車內擁擠程度,后期將繼續優化設備,完善功能。綜上所述,本文系統運行穩定可靠,維護簡單,滿足了智能公交系統智能化、直觀化、人性化的特點。為公交企業的現代化和未來城市智能交通系統的發展奠定了良好的技術基礎,具有廣闊的發展前景。
[1] 張鳳傳, 苗玉彬, 劉印峰, 等. 基于GPS/GPRS/GIS的智能公交監控系統[J]. 計算機工程, 2008, 34(22): 277-279.
[2] Tang Shuming, Wang Feiyue. Wang Gang, et al. Development and Research of Intelligent Transportation Systems in China’s Tenth Five-year Plan[C]//Proc. of IEEE Intelligent Transportation Systems Conference. [S. l.]: IEEE Press, 2006: 377-382.
[3] 高愛玲, 王宏剛, 畢友明. 基于C8051F040的智能公交車載設備系統的設計[J]. 測控技術, 2010, 29(3): 41-44.
[4] 王 偉, 馬洪連, 孫國晴, 等. 智能化公交車載終端的設計與開發[J]. 儀器儀表學報, 2006, 27(6): 666-668.
[5] 潘 良, 劉宏立. GP RS技術在智能公交管理系統中的應用與研究[J]. 計算機工程與科學, 2009, 31(11): 153-155.
[6] 常新峰, 沈連豐, 胡 靜, 等. 一種智能公交車載系統的研制及性能分析[J]. 東南大學學報: 自然科學版, 2009, 39(2): 377-383.
[7] 陳 威, 舒秀蘭, 謝兆鴻. 智能公交系統中電子站牌的設計[J]. 武漢工業學院學報, 2010, 9(2): 63-66.
[8] 陳已康, 詹成初, 陳良貴. 基于路段行程時間的公交到站預測方法[J]. 計算機工程, 2007, 33(21): 281-282.
[9] 徐大偉, 裴玉龍. 智能公共交通系統動態調度模型研究[J].哈爾濱工程大學學報, 2007, 28(3): 273-276.
[10] 梁 松, 梁 燕, 陳繼努. 基于GPRS的智能公交系統通信平臺的實現[J]. 通信技術, 2007, 40(10): 56-58.
[11] 邵 健, 李彥明, 苗玉彬, 等. 智能公交系統中的信息采集與處理技術[J]. 計算機工程, 2008, 34(12): 274-276.
[12] Wang Honggang. Designing and Implementing of the Urba n Intelligent Public Bus Operation Dispatch Software System[C]//Proc. of Co nference on Information T echnology and Environmental System Science. [S. l.]: IEEE Press, 2008: 428-430.
編輯 顧逸斐
Design of Graphical Bus-stop Board with Crowdedness Degree Indication
XIAN Xiao-dong1a,1b, JIANG Peng1b, TANG Yun-jian2, YUAN Yu-peng1b
(1a. Key Laboratory of Information Physical Society Credible Service Computing, Ministry of Education; 1b. College of Automation, Chongqing University, Chongqing 400044, China; 2. Chongqing Academy of Science and Technology, Chongqing 400044, China)
According to domes tic current situation th at electronic bus-stop board i s lack of revealing the cro wdedness degree, a ne w graphical one is designed in this paper. A new method on revealing the crowdedness degree based on ultrasonic test technology is proposed. This paper designs an intelligent public bus vehicle equipment co mbining with Global Positioning System(GPS) and g eneral packet radio service technique. The ultrasonic sensors detect whether there is anyone standing on by ultrasonic test. MCU co unts all the sensors which detect the passengers and estimate the crow dedness degree. It develops a graphical electronic bus-stop board. The system implements some functions, such as revealing the crowdedness degree, vehicle tracking, the bus arrival distance prediction, etc. The system carries out many experiments. The results prove that the system is with high reliability, high accuracy of revealing the crowdedness degree and it visually displays the bus location and the arrival distance in the bus-stop board. It meets requirements of Intelligent Transport System(ITS).
Intelligent Transport System(ITS); ultrasonic ranging; Global Positioning System(GPS); general packet radio service; electronic bus-stop board; multi-threading
10.3969/j.issn.1000-3428.2014.05.057
重慶市科技攻關計劃基金資助重點項目(cstc2011ggB40015)。
鮮曉東(1966-),女,副教授,主研方向:嵌入式系統,信號處理;姜 鵬,碩士;唐云建、袁宇鵬,博士。
2013-01-29
2013-04-14E-mail:xxd@cqu.edu.cn
1000-3428(2014)05-0274-05
A
TP39
猜你喜歡
中國設備工程(2022年12期)2022-07-11 04:33:00
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2019年9期)2019-11-25 07:34:36
中學生數理化·七年級數學人教版(2019年9期)2019-11-25 07:34:34
中學生數理化·七年級數學人教版(2019年12期)2019-05-21 02:53:50
中學生數理化·七年級數學人教版(2019年12期)2019-05-21 02:53:48