一種新的FH迭代學(xué)習(xí)控制器設(shè)計(jì)
2014-08-03 01:05:38李艷輝周秀杰
化工自動(dòng)化及儀表 2014年7期
關(guān)鍵詞:系統(tǒng)
李艷輝 張 暢 周秀杰
(東北石油大學(xué)電氣信息工程學(xué)院,黑龍江 大慶 163318)
迭代學(xué)習(xí)控制(Iterative Learning Control,ILC)在給定時(shí)間內(nèi)以簡(jiǎn)單的學(xué)習(xí)算法可以實(shí)現(xiàn)對(duì)期望軌跡的高精度跟蹤,其基本原理是利用先前的控制信息不斷修正控制輸入,使系統(tǒng)跟蹤性能隨迭代次數(shù)逐步得到改善,且不依靠精確的數(shù)學(xué)模型,因而被廣泛應(yīng)用于機(jī)器人、航天控制及工業(yè)生產(chǎn)等領(lǐng)域[1~3]。在工程控制中,系統(tǒng)的復(fù)雜性、元器件的老化和對(duì)系統(tǒng)的簡(jiǎn)化處理,都會(huì)導(dǎo)致其數(shù)學(xué)模型不精確,從而直接影響控制效果,因此,考慮系統(tǒng)的不確定性是十分必要的。文獻(xiàn)[4]利用魯棒控制律處理系統(tǒng)中的不確定性,將魯棒控制與ILC相結(jié)合,實(shí)現(xiàn)對(duì)被控系統(tǒng)的零誤差跟蹤。文獻(xiàn)[5]分別針對(duì)常參數(shù)化、時(shí)變參數(shù)化的不確定性,利用類(lèi)Lyapunov方法設(shè)計(jì)控制器,實(shí)現(xiàn)對(duì)誤差軌跡的完全跟蹤,然而,當(dāng)系統(tǒng)存在擾動(dòng)時(shí),文獻(xiàn)[4,5]的跟蹤效果將會(huì)受到影響,甚至導(dǎo)致系統(tǒng)不穩(wěn)定。
在實(shí)際生產(chǎn)過(guò)程中不可避免地存在各種外界干擾,這些干擾會(huì)大大降低系統(tǒng)的控制性能,因此,許多學(xué)者對(duì)如何抑制擾動(dòng)進(jìn)行了深入研究[6~9]。文獻(xiàn)[6,7]分別提出帶有衰減因子或時(shí)變遺忘因子的迭代學(xué)習(xí)控制算法,利用因子來(lái)減少擾動(dòng)對(duì)控制量的影響。然而,這兩種算法雖具有良好的控制效果,卻沒(méi)有考慮系統(tǒng)中不可預(yù)見(jiàn)的參數(shù)變化。文獻(xiàn)[8,9]針對(duì)存在干擾的情況,分別設(shè)計(jì)了不同的高階ILC控制器,并給出了其收斂條件,但系統(tǒng)的輸出誤差仍較大,跟蹤效果不理想。
筆者針對(duì)存在初態(tài)誤差、不確定性和干擾的情況,設(shè)計(jì)了非線(xiàn)性時(shí)變系統(tǒng)的新的FH ILC控制器。該控制器利用反饋控制克服不確定性和干擾的影響,同時(shí)利用ILC提高系統(tǒng)的跟蹤性能,并采用λ-范數(shù)理論對(duì)提出的新的FH ILC算法進(jìn)行收斂性證明。仿真實(shí)例表明在滿(mǎn)足一定的收斂條件下,當(dāng)系統(tǒng)的初態(tài)誤差和輸出干擾有界時(shí),跟蹤誤差有界收斂,且該算法顯著地提高了系統(tǒng)的跟蹤精度和收斂速度,對(duì)干擾有較強(qiáng)的抑制能力。
1 問(wèn)題描述①
考慮下列一類(lèi)具有不確定性或干擾的重復(fù)非線(xiàn)性時(shí)變系統(tǒng):
(1)

為不失一般性,假設(shè)該系統(tǒng)滿(mǎn)足如下特性:
a. 存在R0∈Rm×r,使|I+R0C(t)B(xi(t),t)|≠0;
b. 初始誤差有界,即‖xd(0)-xi(0)‖≤bx0,?i。
筆者的目標(biāo)是,在新的ILC控制器作用下,從任意有界的初始狀態(tài)x0(t)開(kāi)始,系統(tǒng)輸出yi(t)在有限時(shí)間上能滿(mǎn)意地跟蹤上期望軌跡yd(t)。
為了證明新的FH迭代學(xué)習(xí)控制器的有效性,給出以下引理。
需要注意的是,初始狀態(tài)通常設(shè)定成與期望值相同[9],然而這種嚴(yán)格的初始定位條件在實(shí)際中是很難滿(mǎn)足的。
為表達(dá)簡(jiǎn)便,以下公式的書(shū)寫(xiě)在沒(méi)有歧義時(shí)省略時(shí)間變量t。
2 主要結(jié)果
考慮形如式(1)的系統(tǒng),傳統(tǒng)的高階ILC方法跟蹤誤差較大,對(duì)干擾的抑制能力不強(qiáng),而反饋控制在系統(tǒng)受到外部擾動(dòng)和系統(tǒng)參數(shù)發(fā)生變化時(shí),能夠保證系統(tǒng)的魯棒性,因此,筆者將反饋控制與ILC相結(jié)合,設(shè)計(jì)了具有如下形式的新的FH迭代學(xué)習(xí)控制器:
(2)

綜合考慮反饋和前饋部分,則此控制器可表示為:
(3)
筆者針對(duì)具有不確定性和輸出干擾的重復(fù)非線(xiàn)性系統(tǒng)(1),提出一種如式(3)的新的FH ILC算法,下面采用λ范數(shù)論證此算法的收斂性。
證明
為表達(dá)方便,做如下定義:
bC1sup‖C(t)‖,bC2
bx0‖δxl(0)‖,bV1
根據(jù)系統(tǒng)(1)和新的FH ILC算法(3)可得:

Q0Vi+1-R0C(δfi+1+δBi+1ud+δWi+1)+
利用Lipschitz條件,由上式可知:
d0+c0‖δxi+1‖}
(4)

根據(jù)牛頓-萊布尼茲公式可知:
‖δxl‖=‖xd(t)-xl(t)‖

其中σ=kf+kBbud+kW。對(duì)上式兩邊取λ范數(shù)可得:
(5)
(6)

(7)

(8)
ei=δyi=yd-yi=Cxd-Cxi-Vi=Cδxi-Vi,進(jìn)一步取λ范數(shù)可得:
‖ei‖λ≤bC1‖δxi‖λ+bV1
(9)
證畢。
需要注意的是,式(5)、(8)和(9)清楚地表明,對(duì)于任意ε>0,總存在正數(shù)δ,當(dāng)干擾界bV1→ε時(shí),‖ei‖λ→δ;當(dāng)ε→0時(shí),有δ→0,即輸出干擾的界越小,控制精度越高,跟蹤效果越理想。
在系統(tǒng)具有不確定性、初態(tài)誤差個(gè)輸出干擾的情況下,新的FH迭代學(xué)習(xí)控制器有效地提高了跟蹤誤差的收斂速度和控制精度,增強(qiáng)了對(duì)干擾的抑制能力。根據(jù)提出的控制律(3),筆者歸納出新的FH ILC算法:
a. 置i=0,設(shè)定初始狀態(tài)xi(0)和初始控制ui+1-k(t),k=1,2,…,N,(t∈[0,T]),并存儲(chǔ)期望軌跡yd(t)(t∈[0,T]);
b. 根據(jù)控制輸入ui(t)(t∈[0,T]求出實(shí)際輸出yi(t)(t∈[0,T],并存儲(chǔ);
c. 計(jì)算跟蹤誤差ei(t)=yd(t)-yi(t)(t∈[0,T]),根據(jù)學(xué)習(xí)律(3)計(jì)算并存儲(chǔ)新的控制輸入ui+1(t)(t∈[0,T]);
d. 檢驗(yàn)迭代停止條件,若滿(mǎn)足條件則停止運(yùn)行;否則執(zhí)行步驟e;
e. 令i=i+1,返回步驟b。
3 仿真實(shí)例
考慮如下單關(guān)節(jié)機(jī)器臂非線(xiàn)性模型:

3.1 傳統(tǒng)PD型高階ILC
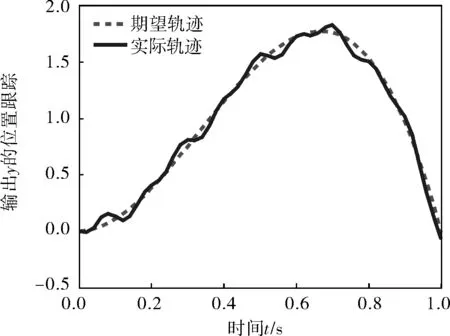
圖1 第20次迭代關(guān)節(jié)位置響應(yīng)
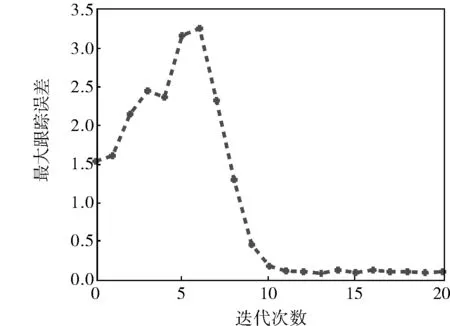
圖2 跟蹤誤差響應(yīng)過(guò)程
由圖1、2可知,雖然實(shí)際軌跡和期望軌跡大致趨勢(shì)相同,但由于擾動(dòng)的影響,經(jīng)過(guò)20次迭代后仍存在較大的波動(dòng);且跟蹤誤差在前幾次迭代過(guò)程中出現(xiàn)階段性增大的情況,經(jīng)過(guò)15次迭代以后,跟蹤誤差降為0.1,跟蹤精度不理想。
3.2 新的FH ILC
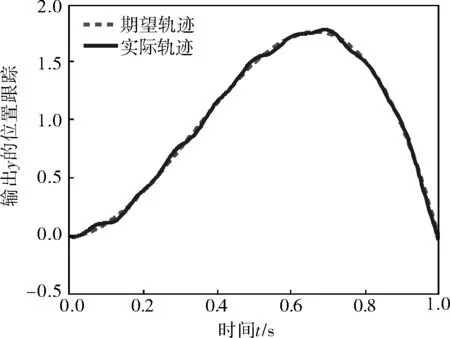
圖3 第10次迭代關(guān)節(jié)位置響應(yīng)

圖4 跟蹤誤差響應(yīng)過(guò)程
由圖3、4可知,經(jīng)過(guò)10次迭代后,新的FH ILC控制器實(shí)現(xiàn)了對(duì)期望軌跡的良好跟蹤,且僅經(jīng)過(guò)4次迭代,跟蹤誤差已約為0.05。與采用傳統(tǒng)高階ILC算法相比,采用新的FH ILC算法系統(tǒng)的跟蹤精度和收斂速度得到有效提高,抗干擾能力得到明顯增強(qiáng)。
4 結(jié)束語(yǔ)
給出一類(lèi)重復(fù)非線(xiàn)性時(shí)變系統(tǒng)的新的FH ILC算法,通過(guò)引入反饋控制來(lái)補(bǔ)償控制量以減小跟蹤誤差,從而消除不確定性和干擾的影響。在滿(mǎn)足一定的收斂條件下,通過(guò)仿真實(shí)例表明了當(dāng)系統(tǒng)的初始狀態(tài)誤差、系統(tǒng)輸出干擾有界時(shí),跟蹤誤差有界收斂,且該控制器能在較少的迭代次數(shù)內(nèi)實(shí)現(xiàn)對(duì)期望軌跡的高精度跟蹤,對(duì)干擾有較強(qiáng)的抑制能力。
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
制造技術(shù)與機(jī)床(2019年10期)2019-10-26 02:47:06
中國(guó)洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
鐵道通信信號(hào)(2018年5期)2018-06-28 03:06:24
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
知識(shí)經(jīng)濟(jì)·中國(guó)直銷(xiāo)(2017年5期)2017-06-15 20:28:19
通信電源技術(shù)(2016年6期)2016-04-20 06:21:32