基于機器視覺的非接觸式液位測量方法研究
2014-08-02 01:16:06劉瓊偉沈繼忱
化工自動化及儀表 2014年9期
李 靜 劉瓊偉 王 璐 沈繼忱
(東北電力大學,吉林 吉林 132012)
為保證工業(yè)生產(chǎn)的安全性,需對石油、化工廠中成千上萬的儲罐進行液位在線檢測。考慮到溫度、壓強及化學性質(zhì)等因素,罐體常處于非敞口狀態(tài)。對該類儲罐液位的測量根據(jù)傳感器是否接觸待測液體可分為接觸式和非接觸式兩種方法。由于采用接觸式測量時需要傳感器與待測液體直接接觸,在測量易燃、易爆類液體時有可能由于傳感器放電而存在安全隱患,因此在這些應(yīng)用場合,必須使用非接觸式傳感器。目前應(yīng)用較多的是超聲波測距,該方法具有測量精度高、安全性高等優(yōu)點,但存在受到不均勻溫度場的干擾及測量介質(zhì)不均勻時測量誤差較大等不足。
利用圖像傳感器與計算機圖像處理算法相結(jié)合的技術(shù)方法可以克服上述難題。文獻[1]中提出了利用激光三角測量原理和角位移同步跟蹤來提取液位圖像的方法,并構(gòu)建了斜三角系統(tǒng)、角位移跟蹤系統(tǒng)及多光源系統(tǒng)等多種測量模型。徐馳等提出以CCD攝像機采集的液位和鋼尺圖像為基礎(chǔ),通過鋼尺刻度識別、鋼尺刻線和液位識別三大識別模塊完成液位高度測量,根據(jù)液位高度反饋控制電機帶動CCD相機跟隨液位,實現(xiàn)實時自動跟蹤測量[2]。楊秀君提出對采集的容器內(nèi)液面圖像采用積分投影法判斷液位線,并通過Hough變換、鏈碼跟蹤+曲線擬合對液面高度實現(xiàn)精確定位,從而得到液面的高度[3]。白瑩提出基于像素點位置和面積的兩種液位測量方法,并對液位晃動進行了分析和驗證[4]。
利用計算機圖像識別技術(shù),建立適用性強、處理效率高的液位測量模型,實現(xiàn)液位的精確讀取具有實際工程意義。筆者建立了一種基于CMOS傳感器的封閉式罐體液位在線測量模型。利用微功率激光源和圖像傳感器搭建非接觸式液位測量實驗系統(tǒng),以光源反射和光源同步跟蹤為基本原理,利用激光三角測量法和CMOS成像技術(shù),結(jié)合準確的圖像處理算法來獲得液位。
1 液位測量系統(tǒng)組成①
以計算機、CMOS圖像傳感器、激光發(fā)射器及密閉實驗罐體等構(gòu)成液位測量系統(tǒng)。圖像傳感器采用沃樂網(wǎng)絡(luò)攝像頭,焦距f=4.8mm,成像分辨率640×480,采用USB2.0接口,即插即用。采用微功率可聚焦激光源,波長為650nm,功率不高于5mW(可避免存在的安全隱患)。罐體采用儲水罐,外接有刻度的連通器。
2 液位測量原理
筆者構(gòu)建多光源線段液位測量系統(tǒng)模型,實驗裝置安裝示意圖如圖1所示。

圖1 液位測量實驗裝置安裝示意圖
設(shè)罐體高度為H,基準線距罐底高度為L1,液位面與基準線(用于基本標定點)間距為h。圖像傳感器和可聚焦激光燈分別以固定夾角λ和φ安裝在罐體頂部兩側(cè)。激光三角液位測量原理如圖2所示。

圖2 激光三角液位測量原理
如圖2所示,由聚焦激光源發(fā)射激光,在液位面形成點N,并通過圖像傳感器接收。假設(shè)光路穿過液位的延長線與罐底交于P點,與圖像傳感器透鏡距離設(shè)為PQ,N垂直于PQ,交點為M。由圖像傳感器與罐體水平面夾角為λ,激光源與水平面夾角為φ,故∠NPQ=λ-φ。假設(shè)NM投影到成像平面上偏離原點為d1,則根據(jù)成像原理可知:
(1)
式(1)中f為焦距,點N、M之間的距離d為:
d=[(h+L1)cscφ]sin(λ-φ)
(2)
傳感器透鏡與交點M間距離為MQ=S:
S=Hcsc(180°-λ)-dcot(λ-φ)
(3)
由式(1)~(3)可知:
(4)
為了方便標定實驗裝置參數(shù),定義A=hsinφsec(λ-φ)cscλ,B=ftan(λ-φ),因此式(4)可簡化為:
(5)
定義C=A-λ,D=Bλ,則式(5)可變形為hB-Cd1+D=-hd1。
在標定實驗初始參數(shù)時需要在不同液位采集n個數(shù)據(jù),即:h=h1,h2,…,hn,由此可得其在成像平面上的偏移量相應(yīng)為:d=d1,d2,…,dn,因此:
MX=P
(6)
其中:
(7)
(8)

(9)

3 實驗裝置
該實驗所采用的圓柱形儲罐規(guī)格為:高60cm,頂部直徑24cm,底部直徑30cm。儲罐壁外側(cè)設(shè)有連通器可直接讀取初始液位。安裝模型如圖1所示,假定初始測量液面高度為30cm,每升高0.5cm采集一張液面圖像,實驗一共采集20組數(shù)據(jù)。利用前10組做標定,其余10組數(shù)據(jù)驗證本測量系統(tǒng)的精度。
3.1 液位面激光斑點中心提取
液位面激光斑點中心提取時,需要考慮:
a. 改變閾值對圖像進行二值化。由于罐體內(nèi)部光線較暗,在圖像成像平面上可能存在液面反射和灰塵引起的漫反射干擾點。針對該問題需要對圖像進行灰度直方圖統(tǒng)計,通過改變閾值可有效減少干擾點,二值化后進行中心提取。
b. 對目標圖像中值濾波降低噪聲。由于圖像邊沿在光線反射等所形成的椒鹽噪聲和斑點噪聲,故通過中值濾波可以使斑點外部輪廓不規(guī)則減弱。采用傳統(tǒng)的3×3模板中值濾波可滿足實驗條件。
c. 激光斑形心提取。由于激光源采用可聚焦,降低了其在液位面交點的大小。基于激光束在液面的交點呈橢圓狀,Gonzalez R C等提出從數(shù)理統(tǒng)計學的角度分析,并假設(shè)探測器噪聲為泊松分布情況下,光斑圖像的位置估值性能及其與光斑尺寸之間具有函數(shù)關(guān)系[5,6]。此外,冀芳提出了基于概率的圓擬合區(qū)域劃分算法來檢測類似圓的形心[7]。筆者綜合兩種結(jié)論,并結(jié)合本測量系統(tǒng)的實際情況,給出了一種光斑位置的估算方法,即對光斑提取邊緣,得出光斑的邊緣尺寸大小對由邊緣構(gòu)成的相對規(guī)則形狀后提取形心。
3.2 系統(tǒng)標定結(jié)果和實驗結(jié)果
利用采集前10組數(shù)據(jù)標定實驗參數(shù)后,將所標定的數(shù)據(jù)與液位下降時的后10組數(shù)據(jù)進行比較,驗證實驗系統(tǒng)的準確性。連通器讀數(shù)代表參考液位,P(I,j)代表激光斑點在攝像機成像平面上的形心坐標。連通器讀數(shù)和液位實際高度見表1。
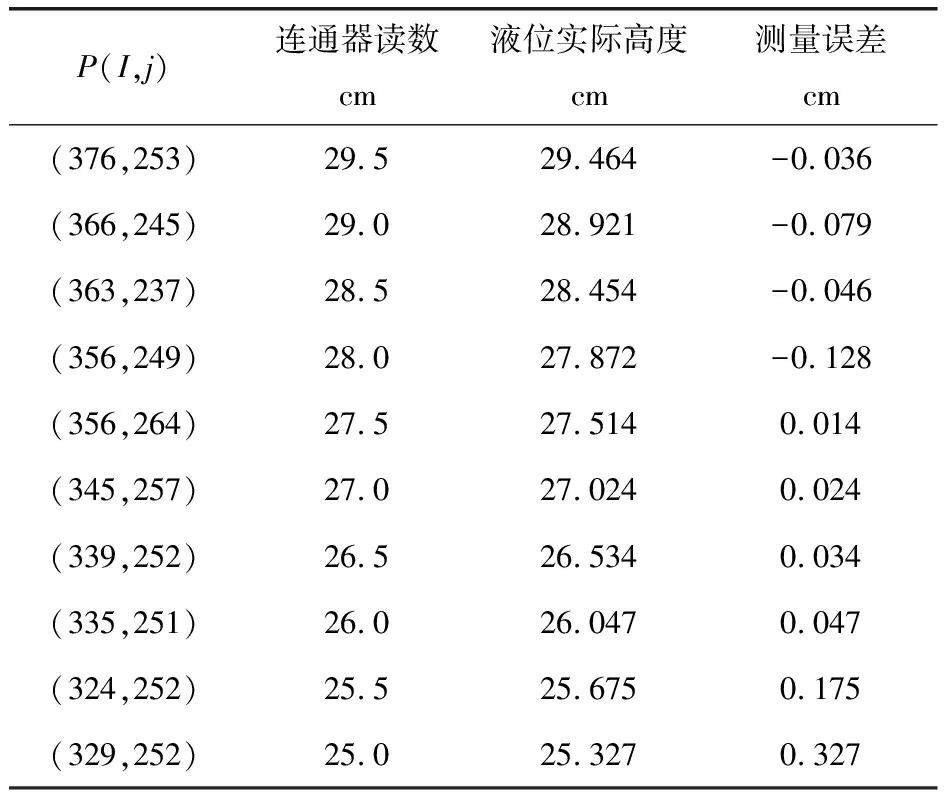
表1 連通器讀數(shù)和液位實際高度
從表1中數(shù)據(jù)可知,該測量方法與實際液位有一定偏差,根據(jù)標準差計算公式可知所測液位的標準差S=0.1076。
4 結(jié)束語
筆者提出了一種新穎的基于圖像處理技術(shù)的密閉式罐體非接觸式液位測量方法。通過激光和圖像處理技術(shù),提高了測量精度,并利用實驗平臺驗證技術(shù)方案的可靠性,該測量方法具有安全、精確及高效等優(yōu)點,符合實際工程應(yīng)用要求。由于實驗裝置安裝固定,可避免較為繁瑣的參數(shù)校正。此外,若利用高分辨率圖像傳感器可更進一步提高精確度。
猜你喜歡
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
中學生數(shù)理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
中學生數(shù)理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
測控技術(shù)(2018年9期)2018-11-25 07:45:00
石油化工自動化(2018年5期)2018-11-14 02:34:30
中學生數(shù)理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
發(fā)明與創(chuàng)新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
