不同隨機波影響因子下張力腿平臺動力響應(yīng)
2014-07-31 20:20:48劉為民谷家揚盧燕祥
艦船科學(xué)技術(shù) 2014年7期
關(guān)鍵詞:分析
劉為民,谷家揚,盧燕祥
(江蘇科技大學(xué) 船舶與海洋工程學(xué)院,江蘇 鎮(zhèn)江 212003)
不同隨機波影響因子下張力腿平臺動力響應(yīng)
劉為民,谷家揚,盧燕祥
(江蘇科技大學(xué) 船舶與海洋工程學(xué)院,江蘇 鎮(zhèn)江 212003)
采用時域耦合法對某傳統(tǒng)式張力腿平臺進(jìn)行非線性動力響應(yīng)研究,重點討論不同隨機波有義波高、譜峰周期和入射波方向?qū)埩ν绕脚_各自由度運動響應(yīng)和頂端張力的影響。結(jié)果顯示,本文各工況各自由度最大位移均滿足設(shè)計要求。縱蕩、垂蕩和首搖運動幅值對有義波高較為敏感;平面內(nèi)運動對譜峰周期較敏感,而譜峰周期對平面外運動影響不大;平面內(nèi)運動對入射波角度較敏感。縱蕩和首搖為低頻運動,垂蕩和縱搖為高頻運動,其中垂蕩與縱蕩相耦合;由于高頻載荷引起平臺升沉、橫搖和縱搖運動,而這3種運動又作用于張力腿軸向振蕩,從而使得張力腿頂端張力表現(xiàn)為高頻響應(yīng)。
時域耦合;高頻;低頻;非線性;運動響應(yīng)
0 引 言
張力腿平臺是一種半順應(yīng)半剛性平臺,擁有較為出色的運動性能,因此,在深海油氣開發(fā)中占據(jù)重要一席之地[1]。相關(guān)專家、學(xué)者對張力腿平臺某些方面進(jìn)行研究和探討,王世圣等[2]利用SESAM軟件對南海某張力腿平臺進(jìn)行了六自由度運動和靜力分析,結(jié)果表明該平臺適應(yīng)南海1 500 m水深復(fù)雜海洋環(huán)境并擁有良好運動性能。Y.M.Low[3]采用等效線性化方法對某張力腿平臺進(jìn)行耦合動力響應(yīng)研究,并對時域和頻域計算結(jié)果進(jìn)行分析。M.R.Tabeshpour等[4]采用擾動法對規(guī)則波下軸向載荷變化對某張力腿平臺運動性能影響進(jìn)行研究,結(jié)果得出位移軌跡和時間歷程圖。CHEN Xiao-hong等[5]采用4種不同方法(實驗測量、準(zhǔn)靜態(tài)法、基于輻射和繞射理論的COUPLE軟件和WAMIT軟件)對某迷你型張力腿平臺進(jìn)行研究和比較,結(jié)果顯示準(zhǔn)靜態(tài)法僅能在波頻范圍內(nèi)進(jìn)行預(yù)報,而COUPLE在各波頻內(nèi)均具有良好計算結(jié)果。S.Chandrasekaran等[6]采用Stokes理論對不同浪向下三角形布置的張力腿平臺進(jìn)行了動力響應(yīng)研究,結(jié)果表明浪向角對各自由度運動(除垂蕩)影響較大,而直線型運動為非線性運動。S.Chandrasekaran等[7]對不同慣性力系數(shù)和拖曳力系數(shù)的某三角形張力腿平臺進(jìn)行了規(guī)則波非線性動力響應(yīng)研究,重點討論了上述系數(shù)對縱蕩、縱搖和垂蕩的影響。任順利等[8]采用SESAM軟件對不同剛度影響下的張力腿平臺運動進(jìn)行響應(yīng)分析,結(jié)果顯示對張力腿平臺初步設(shè)計具有一定的參考作用。
國內(nèi)外學(xué)者主要對規(guī)則波下、不同耦合方法和不同張力腿平臺本身參數(shù)影響下的動力特性進(jìn)行研究,對于不同隨機波影響因子下的動力響應(yīng)研究較少。因此,本文采用時域耦合方法對不同隨機波下張力腿平臺非線性動力響應(yīng)進(jìn)行研究。由于南海海洋環(huán)境復(fù)雜性,本文著重對不同特征波高、譜峰周期下張力腿平臺運動和張力腿頂端張力變化進(jìn)行分析和討論。
1 運動方程
浮式海洋結(jié)構(gòu)物運動方程如下[9-11]:

(1)
(2)
式中:M為頻率相關(guān)矩陣;m為浮體質(zhì)量矩陣;A為頻率相關(guān)附加質(zhì)量;C為頻率相關(guān)勢流矩陣;D1為線性阻尼矩陣;D2為二階阻尼矩陣;f為速度矢量函數(shù);K為水靜力剛度矩陣;x為位移矢量;q為矢量激勵力;ω為頻率。
2 張力腿平臺模型概述
本文以我國南海所設(shè)計某傳統(tǒng)式張力腿平臺為研究對象,結(jié)構(gòu)主體分別由4個立柱和4個浮箱組成,該平臺主體關(guān)于中縱剖面和中橫剖面對稱,其示意圖和張力腿布置及編號分別如圖1和圖2所示。本文僅考慮張力腿對主體作用,而忽略其他附屬結(jié)構(gòu)物對主體作用。張力腿平臺主體主要參數(shù)和張力筋腱參數(shù)分別如表1和表2所示。

圖1 張力腿平臺示意圖Fig.1 Plot of TLP

圖2 張力腿布置及其編號Fig.2 The arrangement and makers of tendons

參數(shù)數(shù)值參數(shù)數(shù)值參數(shù)數(shù)值重量/t20950立柱半徑/m7.1重心距水線面高度/m9.25排水量/t33525立柱高度/m46.6橫搖回轉(zhuǎn)半徑/m29.15總預(yù)張力/t12575立柱間距/m58.3縱搖回轉(zhuǎn)半徑/m29.15作業(yè)吃水/m26.6浮箱寬度/m11首搖回轉(zhuǎn)半徑/m32.1張力腿數(shù)目12浮箱高度/m8工作水深/m1000

表2 張力筋腱參數(shù)(每根)
由于隨機波可視為由許多規(guī)則波疊加而成,因此采用波浪譜對海面進(jìn)行模擬。另外,由于深海海域擁有不同成長階段波,因此,本文采用JONSWAP譜。根據(jù)有義波高(Hs=6 m,8 m和10 m)和譜峰周期(Tp=10 s,12 s和14 s)進(jìn)行不同組合,進(jìn)而對不同入射波方向(0°, 22.5°, 45°)下的張力腿平臺動力響應(yīng)進(jìn)行研究。各計算工況表示為ID*H*T*形式,如ID0H6T10表示入射波角度0°,有義波高6 m和譜峰周期10 s計算工況。
3 計算結(jié)果分析
本文利用SESAM軟件,通過時域耦合方法對不同隨機波下張力腿平臺非線性動力響應(yīng)進(jìn)行研究,根據(jù)規(guī)范(漂移≤工作水深5%,升沉≤±1 m,搖擺≤±3°)判斷各工況是否滿足設(shè)計要求。
3.1 有義波高對張力腿平臺運動影響分析
相同入射波方向、相同譜峰周期、不同有義波高下(ID0H6T10、ID0H8T10和ID0H10T10)各自由度運動統(tǒng)計結(jié)果如圖3~圖6所示。對圖3~圖6進(jìn)行分析可知,隨著有義波高的增大,縱蕩、縱搖和首搖的最大響應(yīng)、最小響應(yīng)和平均值絕對值增大較明顯,這意味著張力腿平臺隨著有義波高的增大,縱蕩、縱搖和首搖運動幅值逐漸增大;平衡位置相對初始位置也逐漸變大。各自由度標(biāo)準(zhǔn)差值隨著有義波高增大而逐漸增大,即張力腿平臺隨著有義波高增大愈來愈不穩(wěn)定。通過對圖3分析可知,張力腿平臺沿x軸正方向力隨著有義波高增大而增大,導(dǎo)致縱蕩運動正方向位移較負(fù)方向位移值大,且增長率更快,體現(xiàn)了縱蕩運動慢漂特點。從圖4可分析,由于垂蕩運動與縱蕩運動耦合,使得z軸負(fù)方向力隨有義波高增大而增大,因此其最小響應(yīng)較最大響應(yīng)增長較快;又垂蕩運動最大響應(yīng)稍有增大趨勢,即張力腿平臺隨有義波高的增大,張力腿平臺平衡位置逐漸下移。通過圖5可知,縱搖平均值幾乎為0,即平衡位置在初始位置附近處作來回振蕩運動。綜上,縱蕩、垂蕩和首搖最大響應(yīng)對有義波高較為敏感,且垂蕩和首搖最小響應(yīng)對有義波高較為敏感。

圖4 不同有義波高下垂蕩運動統(tǒng)計值Fig.4 Statistics of heave motion under different significant wave heights

圖5 不同有義波高下縱搖運動統(tǒng)計值Fig.5 Statistics of pitch motion under different significant wave heights

圖6 不同有義波高下運動首搖統(tǒng)計值Fig.6 Statistics of yaw motion under different significant wave heights
不同自由度運動頻譜反映的是不同頻率下能量譜分布情況、各自由度高低頻運動等。圖7~圖10所示為不同有義波高下不同自由度運動頻譜,從圖7~圖10分析可知,同一頻率下能量值隨著有義波高的增大而逐漸增大;在同一頻率下,峰值有輕微相位差。從圖7分析可知,縱蕩頻譜圖中只有1個峰值,且頻譜峰值隨著有義波高的增大而逐漸增大,這是張力腿平臺沿x軸方向受力呈直線型增長的緣故。縱蕩頻譜圖中0.6 rad/s處呈現(xiàn)出較小能量峰值,這是平面外高頻運動所引起。從圖8分析,由于垂蕩運動與低頻縱蕩運動相耦合的緣故,導(dǎo)致垂蕩運動在0.05 rad/s附近處顯示出較高能量值。另外,垂蕩峰值隨著有義波高的增大而有所增大,其中有義波高10 m尤為明顯。由圖10所示,首搖運動為低頻運動,與其固有周期(高于40 s)相對應(yīng),同一頻率下能量值隨有義波高的增大成倍增長,峰值所對應(yīng)頻率無明顯相位差特點。

圖7 不同有義波高下縱蕩運動頻譜Fig.7 PSD of surge under different significant wave heights

圖8 不同有義波高下垂蕩運動頻譜Fig.8 PSD of heave under different significant wave heights
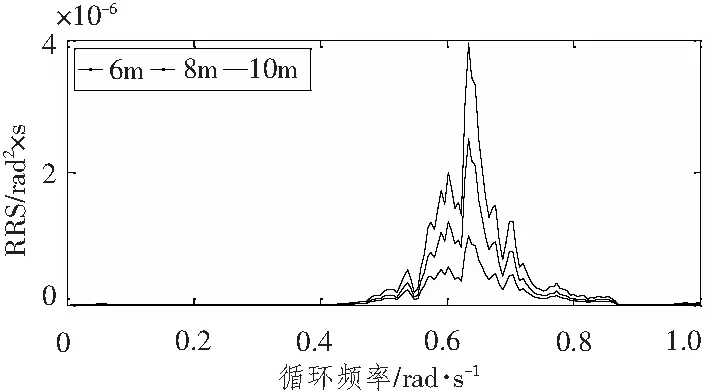
圖9 不同有義波高下縱搖運動頻譜Fig.9 PSD of pitch under different significant wave heights

圖10 不同有義波高下首搖運動頻譜Fig.10 PSD of yaw under different significant wave heights
3.2 譜峰周期對張力腿平臺運動影響分析
相同入射波方向、相同特征波高,不同譜峰周期(ID0H6T10、ID0H6T12和ID0H6T14)下各自由度運動統(tǒng)計結(jié)果如圖11~圖14所示。對圖11~圖14進(jìn)行分析可知,縱蕩和首搖運動下各統(tǒng)計值變化較為明顯,而垂蕩和縱搖運動變化較小。對圖11分析,隨著譜峰周期的增大,縱蕩運動最大響應(yīng)、平均值、標(biāo)準(zhǔn)差逐漸減小,而最小響應(yīng)無明顯變化趨勢,即隨著譜峰周期的增大,張力腿平臺平衡位置逐漸趨向于初始位置,且縱蕩運動振蕩激烈程度降低。從圖12可知,垂蕩運動中各自由度運動無明顯變化規(guī)律,在-0.15 m附近處作來回振蕩運動,即垂蕩運動對譜峰周期敏感性不強。對圖13進(jìn)行分析,縱搖運動各統(tǒng)計值無明顯變化,張力腿平臺在初始位置作搖擺運動。對圖14進(jìn)行分析可知,首搖最大響應(yīng)和最小響應(yīng)絕對值隨著譜峰周期的增大而減小,間接體現(xiàn)了張力腿平臺平衡位置逐漸向初始位置處移動;另外,譜峰周期12 s和14 s下標(biāo)準(zhǔn)差幾乎為0,即譜峰周期10 s下首搖運動較其它兩譜峰周期下激烈。綜上,平面內(nèi)運動對譜峰周期最為敏感,而譜峰周期對平面外運動影響不大。

圖11 不同譜峰周期下縱蕩運動統(tǒng)計值Fig.11 Statistics of surge motion under different peak spectral periods

圖12 不同譜峰周期下垂蕩運動統(tǒng)計值Fig.12 Statistics of heave motion under different peak spectral periods

圖13 不同譜峰周期下縱搖運動統(tǒng)計值Fig.13 Statistics of pitch motion under different peak spectral periods
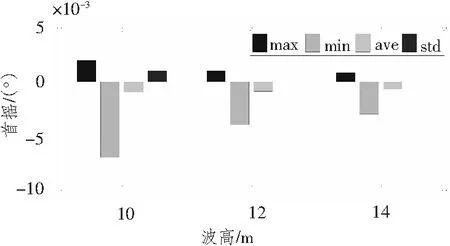
圖14 不同譜峰周期下運動首搖統(tǒng)計值Fig.14 Statistics of yaw motion under different peak spectral periods

圖15 不同譜峰周期下縱蕩運動頻譜Fig.15 PSD of surge under different peak spectral periods

圖17 不同譜峰周期下縱搖運動頻譜Fig.17 PSD of pitch under different peak spectral periods
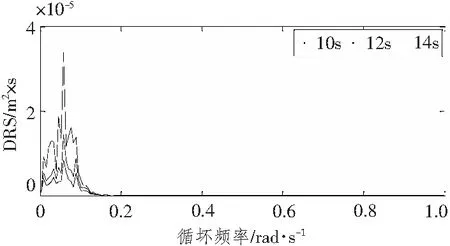
圖18 不同譜峰周期下首搖運動頻譜Fig.18 PSD of yaw under different peak spectral periods
圖15~圖18所示為不同譜峰周期下不同自由度運動頻譜,從圖15~圖18分析可知,平面內(nèi)運動頻譜較平面外運動頻譜較規(guī)則,變化規(guī)律明顯;除縱蕩運動外,其他頻譜圖中均有2個及2個以上峰值。從圖15分析可知,隨著譜峰周期的增大,相同頻率下峰值逐漸減小,且譜峰所對應(yīng)頻率有增大趨勢。從圖16分析可知,垂蕩運動頻譜在較低頻率下,譜峰變化與縱蕩運動譜峰變化相對應(yīng),這是垂蕩運動與縱蕩運動耦合的結(jié)果;但垂蕩運動為高頻運動。對圖17可分析,由于縱搖和垂蕩所受荷載為高頻荷載,因而表現(xiàn)為高頻運動,且頻譜變化復(fù)雜。對圖18分析可知,譜峰值隨著譜峰周期的增大而減小,譜峰周期10 s下譜峰較其他兩譜峰周期下要大很多。綜上,在譜峰周期小于等于10 s以下,各自由度運動也許對譜峰周期較為敏感,而譜峰周期大于等于12 s,敏感性降低;縱蕩、首搖運動為低頻運動,而垂蕩和縱搖為高頻運動。
3.3 同根張力腿頂端張力能量譜分析
圖19和圖20所示分別為張力腿(T1)頂端張力隨有義波高和譜峰周期變化的能量譜。對圖19和圖20分析可知,張力腿(T1)在不同有義波高和譜峰周期下均為高頻運動;不同有義波高影響下能量譜有明顯變化規(guī)律,而不同譜峰周期下能量譜分布較為分散。對圖19分析,張力腿(T1)頂端張力能量譜隨有義波高的增加而逐漸增大,且各有義波高下頂端張力能量譜峰值所對應(yīng)頻率均約為0.62 rad/s。對圖20分析可得,隨著譜峰周期的增大,張力腿(T1)頂端張力能量譜峰值所對應(yīng)頻率逐漸減小,其頻率分別約為0.62 rad/s、0.60 rad/s和0.58 rad/s。由于受篇幅限制,對不同影響因子下的其他張力腿能量譜分析就不作贅述。綜上,張力腿(T1)對有義波高敏感性較高,而對譜峰周期敏感性較低。
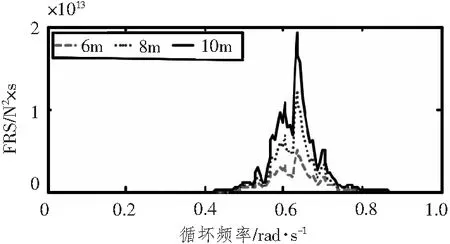
圖19 不同有義波高下張力腿(T1)頂端張力能量譜Fig.19 PSD of top tension of T1 under different wave directions

圖20 不同譜峰周期下張力腿(T1)頂端張力能量譜Fig.20 PSD of top tension of T1 under different wave heights
3.4 浪向角對各自由度影響分析
表3所示為不同浪向角(0°,22.5°,45°),特征波高6 m,譜峰周期10 s下張力腿平臺各自由度運動最大響應(yīng)、最小響應(yīng)、平均值和標(biāo)準(zhǔn)差。最大響應(yīng)和最小響應(yīng)反映了張力腿平臺運動幅度,平均值反映了張力腿平臺平衡位置,標(biāo)準(zhǔn)差反映了張力腿平臺在平衡位置周圍的運動劇烈程度。從表3可分析,縱蕩最大響應(yīng)和最小響應(yīng)絕對值、平均值和標(biāo)準(zhǔn)差均隨著浪向角逐漸增大而減小,反映了張力腿平臺隨著浪向角逐漸增大,縱蕩方向運動幅度逐漸減小,平衡位置逐漸向張力腿平臺初始位置靠近,縱蕩運動愈穩(wěn)定,這是由于x方向分力隨著浪向角增大而減小的緣故。相反,由于y軸方向分力隨著浪向角逐漸增大,導(dǎo)致張力腿平臺在橫蕩方向運動幅度增大,平衡位置離初始位置愈遠(yuǎn),橫蕩運動越不穩(wěn)定。由于垂蕩與橫蕩/縱蕩相耦合,使得垂蕩方向各統(tǒng)計值變化不大。另外,首搖響應(yīng)值在22.5°下的量級最大,其次是0°,最后是45°,說明首搖對浪向角敏感性較強。在浪向角45°下,縱蕩與橫蕩、縱搖和橫搖各統(tǒng)計值基本一致,這是因為在浪向角45°下,沿x,y軸及繞x,y軸分力相等。

表3 不同浪向角張力腿平臺六自由度響應(yīng)比較
4 結(jié) 語
本文通過時域耦合法對某傳統(tǒng)式張力腿平臺進(jìn)行非線性動力響應(yīng)研究,主要討論了不同有義波高、譜峰周期和入射波對六自由度響應(yīng)影響,以及張力腿頂端張力變化情況。主要結(jié)論如下:
1)各工況各自由度最大響應(yīng)均滿足設(shè)計要求,保證了漂移≤工作水深5%,升沉≤±1 m,搖擺≤±3°;
2)縱蕩、垂蕩和首搖最大響應(yīng)對有義波高較為敏感,而垂蕩和首搖最小響應(yīng)對有義波高較為敏感;平面內(nèi)運動對譜峰周期較敏感,而譜峰周期對平面外運動影響不大;平面內(nèi)運動對入射波角度較敏感;
3)縱蕩和首搖為低頻運動,垂蕩和縱搖為高頻運動,其中垂蕩與縱蕩相耦合;由于高頻載荷引起平臺升沉、橫搖和縱搖運動,而這3種運動又作用于張力腿軸向振蕩,從而使得張力腿頂端張力表現(xiàn)為高頻響應(yīng);
4)隨著有義波高的增大,各運動幅值逐漸增大,且頻譜峰值也逐漸變大;隨著譜峰周期的增大,縱蕩和首搖運動幅值減小,且頻譜峰值也逐漸減小;隨著入射波方向由0°增至45°,縱蕩運動幅值逐漸變小且越穩(wěn)定,而橫蕩運動幅值逐漸增大且愈不穩(wěn)定。
[1] CHRISTOPHER N.Mahoney and chad supan of wood group mustang.2012 Deepwater.Solutions & Records for Concept Selection.Offshore,2012.
[2] 王世圣,謝彬,李新仲.在南海環(huán)境條件下深水典型TLP的運動響應(yīng)分析[J].中國造船,2011,52(1):94-101.
WANG Shi-sheng,XIE Bin,LI Xin-zhong.The motion response analysis of deep water typical TLP in environment conditions of south china sea[J].Shipbuilding of China,2011,52(1):94-101.
[3] LOW Y M.Frequency domain analysis of a tension leg pl-atform with statistical linearization of the tendon restoring forces[J].Marine Structures,2009:1-24.
[4] TABLEESHPOUR M R,GOLAFSHANI A A,SEIF M S.Second-order perturbation added mass fluctuation on vertical vibration of tension leg platforms[J].Marine Structures,2006,19:271-283.
[5] CHEN Xiao-hong,DING Yu,ZHANG Jun,et al.Coupled dynamic analysis of a mini TLP:comparison with measurements[J].Ocean Engineering,2006,33:93-117.
[6] CHANDRASEKARAN S,JAIN A K.Anupam gupta.inf-luence of wave approach angle on TLP′s response[J].Ocean Engineering,2007,34:1322-1327.
[7] CHANDRASEKARAN S,JAIN A K,CHANDAK N R.Inf-luence of hydrodynamic coefficients in the response behavior of triangular TLPs in regular waves[J].Ocean Engineering,2004,31:2319-2342.
[8] 任順利,陳建民,梁艷霞.張力腿剛度對平臺運動響應(yīng)影響分析[J].石油礦場機械,2008,37(5):28-31.
REN Shun-li,CHEN Jian-min,LIANG Yan-xia.Influence of tether stiffness on TLP[J].Oil Field Equipment,2008,37(5):28-31.
[9] DNV,SESAM User Manual Wadam Version 8.2, 2010.
[10] DNV,SESAM User Manual HydroD Version 4.5, 2011.
[11] MARINTEK.SIMO-Theory Manual V3.6.2009.
Research on dynamic response of different irregular wave factors on TLP
LIU Wei-min,GU Jia-yang, LU Yan-xiang
(School of Naval Architecture and Marine Engineering, Jiangsu University of Science and Technology, Zhenjiang 212003, China)
The time-domain coupling method is applied in this paper to study on nonlinear dynamic response of classical tension leg platform. Different irregular significant wave heights, spectral periods and incoming directions have influence on different degrees of freedom and top tension of tether, which is mainly discussed in this paper. The results demonstrate that the maximum displacements of all cases satisfy the requirements of rules. The amplitudes of surge, heave and yaw are sensitive to significant wave height. Motion in-plane is sensitive to spectral periods which have little influence on motion out of plane. Motion in-plane is also sensitive to incoming directions. Surge and yaw are low-frequency motions, and heave and yaw are high-frequency motions. Heave and surge have coupling motion each other. Due to heave, roll and pitch caused by high-frequency load which lead to vibration with high-frequency response of top tension in axis direction of tendon.
time-domain coupling;high-frequency;low-frequency;nonlinear;motion response
2014-03-19;
2014-04-08
國家自然科學(xué)基金資助項目(51309123);江蘇省高校自然科學(xué)研究資助項目(13KJB570002);江蘇省船舶先進(jìn)設(shè)計制造技術(shù)重點實驗室開放研究基金資助項目(CJ1203)。
劉為民(1979-),女,講師,主要研究方向為近海岸工程水動力性能。
TE951
A
1672-7649(2014)07-0058-06
10.3404/j.issn.1672-7649.2014.07.013
猜你喜歡
現(xiàn)代畜牧科技(2021年9期)2021-10-13 06:39:14
民用飛機設(shè)計與研究(2020年4期)2021-01-21 09:15:02
電子制作(2018年18期)2018-11-14 01:48:24
山東工業(yè)技術(shù)(2016年15期)2016-12-01 05:31:22
當(dāng)代經(jīng)濟(jì)研究(2016年5期)2016-12-01 03:12:05
現(xiàn)代農(nóng)業(yè)(2016年5期)2016-02-28 18:42:46
出版與印刷(2016年3期)2016-02-02 01:20:11
中國中醫(yī)藥現(xiàn)代遠(yuǎn)程教育(2014年11期)2014-08-08 13:23:44
華北水利水電大學(xué)學(xué)報(社會科學(xué)版)(2014年3期)2014-04-16 04:38:31
終身教育研究(2014年5期)2014-02-28 01:23:06
