基于SimulationX的船用大功率CCG傳動系統(tǒng)仿真
2014-07-31 20:18:01于東洋
艦船科學(xué)技術(shù) 2014年3期
關(guān)鍵詞:模型
宋 強(qiáng),于東洋,陳 濤
(中國船舶重工集團(tuán)公司 第七○三研究所,黑龍江 哈爾濱 150036)
基于SimulationX的船用大功率CCG傳動系統(tǒng)仿真
宋 強(qiáng),于東洋,陳 濤
(中國船舶重工集團(tuán)公司 第七○三研究所,黑龍江 哈爾濱 150036)
采用SimulationX仿真平臺對大功率艦船所采用的四機(jī)兩軸CCG傳動進(jìn)行系統(tǒng)仿真分析研究。針對四機(jī)兩軸CCG傳動形式,建立傳動系統(tǒng)的各個仿真子模型,經(jīng)過封裝組合形成完整的系統(tǒng)仿真模型。通過仿真計(jì)算結(jié)果與試驗(yàn)數(shù)據(jù)的對比,證明本文中傳動系統(tǒng)的仿真建模方法及系統(tǒng)模型的有效性與正確性。
SimulationX;艦船;CCG傳動;系統(tǒng)仿真;傳動系統(tǒng)
0 引 言
大功率CCG(Cross-connect Gear)傳動作為一種新型的傳動形式,其諸多優(yōu)點(diǎn)已引起許多國家的重視,并將其應(yīng)用于實(shí)船。目前,國外CCG傳動裝置的典型傳動形式主要有兩機(jī)兩軸傳動、三機(jī)兩軸傳動和四機(jī)兩軸傳動形式。兩機(jī)兩軸傳動型式主要應(yīng)用于護(hù)衛(wèi)艦、水翼船等小型船舶。三機(jī)兩軸和四機(jī)兩軸傳動形式主要應(yīng)用于巡洋艦、驅(qū)逐艦等大中型船舶。
由于大功率CCG傳動系統(tǒng)[1]的復(fù)雜性,僅僅通過試驗(yàn)測試很難獲得詳細(xì)的重要參數(shù)和系統(tǒng)特性。為此,本文采用SimulatinoX平臺[2-4]對大功率四機(jī)兩軸CCG傳動形式進(jìn)行系統(tǒng)仿真分析計(jì)算[5-6],通過與試驗(yàn)測試曲線的比對,驗(yàn)證仿真分析方法的正確性。
1 四機(jī)兩軸CCG傳動系統(tǒng)
如圖1所示,四機(jī)兩軸CCG傳動系統(tǒng)主要由電機(jī)、右增速齒輪箱、左增速齒輪箱、跨接齒輪箱、右減速齒輪箱、左減速齒輪箱、右換向齒輪箱、左換向齒輪箱、測功機(jī)等組成。電機(jī)為傳動系統(tǒng)提供動力。動力經(jīng)聯(lián)軸器傳動、離合器傳動、齒輪嚙合傳動和軸傳動到達(dá)測功機(jī)(模擬實(shí)際負(fù)載)。跨接齒輪箱與左、右增速齒輪箱之間、左換向齒輪箱與4#電機(jī)之間、右換向齒輪箱與3#電機(jī)之間各有一個同步自動離合器,左減速齒輪箱和右減速齒輪箱各有一個可控離合器。圖2為傳動系統(tǒng)中齒輪傳動機(jī)構(gòu)的結(jié)構(gòu)簡圖。

圖1 四機(jī)兩軸CCG傳動系統(tǒng)布置圖Fig.1 Layout of four-engine and two-shaft CCG transmission system

圖2 傳動系統(tǒng)輪系簡圖Fig.2 Gear train sketch of transmission system
四機(jī)兩軸CCG傳動系統(tǒng)是一個集機(jī)、電、液一體的復(fù)雜系統(tǒng)。本文分析的四機(jī)兩軸CCG傳動系統(tǒng)包括機(jī)械系統(tǒng)和控制系統(tǒng)2個主要系統(tǒng)。其主要參數(shù)如表1所示。

表1 四機(jī)兩軸CCG傳動系統(tǒng)主要參數(shù)
2 SimulationX平臺計(jì)算方法及求解器
SimulationX仿真平臺提供了3種用于瞬態(tài)仿真的求解器,即BDF法、MEBDF法和CVODE法。針對本文所建的模型,選擇MEBDF求解器。MEBDF求解器更適合于求解高指標(biāo)模型,這類模型的結(jié)果更加精確,仿真速度通常也會更快些。
MEBDF求解器是基于控制步長和階次(k)的預(yù)測-修正方法。使用這種隱式多步方法,當(dāng)前值由每個狀態(tài)變量已經(jīng)計(jì)算出的(k+1)次數(shù)值外推得到(預(yù)測);然后,該數(shù)值反復(fù)迭代進(jìn)行修正,直至達(dá)到期望的精度并滿足收斂標(biāo)準(zhǔn)(糾正),如圖3所示。如果接受了糾正值,就處理下一個時間步;最后,從迭代曲線中計(jì)算出新的步長和/或階次。如果迭代一定次數(shù)后還得不到滿足精度要求的糾正值,那么減小步長和/或階次,重新進(jìn)行該時間步的計(jì)算。

圖3 預(yù)測-糾正法Fig.3 Forecasting and rectification method
最大階次表示計(jì)算中可能包含了多少個已經(jīng)計(jì)算完的點(diǎn)。仿真過程中,系統(tǒng)自動控制階次。當(dāng)最大階次選擇為1時,算法相當(dāng)于隱式歐拉法。當(dāng)采用最小步長仍無法收斂時,應(yīng)首先要嘗試減小最小步長。只有在這個不起作用的情況下,才可以放寬誤差范圍。僅在模型具有很強(qiáng)的非線性導(dǎo)致缺省設(shè)置下的方法計(jì)算緩慢或者無法求解的情況下,才需要減小最大階次。自動控制通常保證計(jì)算中總是使用最佳階次。
每次糾正迭代中,必須求解下面的線性方程組:
res=J·(Xi-1-Xi)。
(1)
其中:res為剩余誤差;X為狀態(tài)變量;i為迭代次數(shù);J為雅可比矩陣。
為此,可以使用稀疏矩陣求解器、高斯方法和比例高斯方法等。稀疏矩陣求解法的優(yōu)勢是需要求解的方程系統(tǒng)中主要是僅存在局部依賴性。這使得雅可比矩陣中產(chǎn)生很多為0的項(xiàng),而這些零項(xiàng)在求解過程中不需要考慮。與高斯求解方法相比,該方法的計(jì)算速度就快多了。對于具有很強(qiáng)耦合性而找不到稀疏雅可比矩陣的情況,采用高斯求解方法。具有很強(qiáng)時間常數(shù)差異或狀態(tài)變量數(shù)量級變化較大的模型會表現(xiàn)出約束性很強(qiáng)的雅可比矩陣,這會導(dǎo)致修正步中收斂性很差或者仿真失敗。比例高斯方法可用于改善約束條件的數(shù)目,因此能夠達(dá)到不錯的求解效果。
3 四機(jī)兩軸CCG傳動仿真系統(tǒng)建模
基于SimulationX仿真平臺建立四機(jī)兩軸CCG傳動系統(tǒng)仿真模型,如圖4所示。
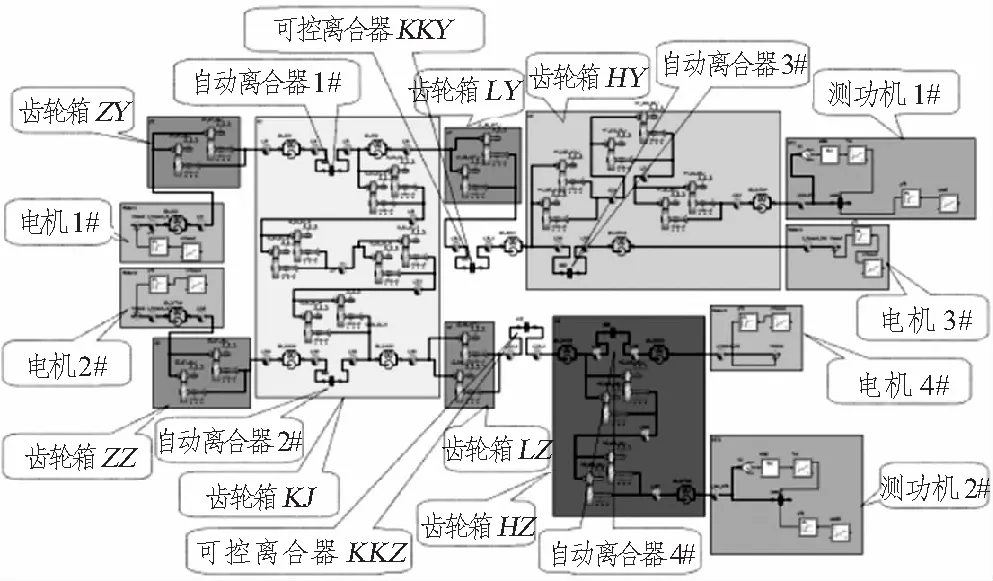
圖4 四機(jī)兩軸CCG傳動系統(tǒng)仿真模型Fig.4 Simulation model of four-engine and two-shaft CCG transmission system
3.1 典型仿真模型建立
基于最小元素組合建模理念,分別對四機(jī)兩軸CCG傳動系統(tǒng)的主要典型元件進(jìn)行建模。
3.1.1 軸的建模
軸的仿真模型分解為轉(zhuǎn)動慣量和彈簧阻尼2類基本元素。彈簧阻尼原件可以設(shè)定軸的剛度和阻尼值。

圖5 軸仿真模型Fig.5 Simulation model of shaft
3.1.2 滑動軸承建模
對于滑動軸承,則可分解為空間3個方向(徑向,軸向,切向)的質(zhì)量、彈簧阻尼和預(yù)緊力(位移)等基本元素。

圖6 滑動軸承仿真模型Fig.6 Simulation model of journal bearing
3.1.3 人字齒輪建模
對于每個人字齒輪,則分解為2個并排且軸剛性連接(保證具有相同的運(yùn)動關(guān)系)的具有相反螺旋角度的斜齒輪基本元素。

圖7 人字齒仿真模型Fig.7 Simulation model of herringbone gear
3.1.4 同步自動離合器建模
用彈性摩擦元件來模擬同步自動離合器。根據(jù)同步自動離合器的結(jié)構(gòu)和工作原理,當(dāng)輸入端轉(zhuǎn)速大于輸出端轉(zhuǎn)速時,進(jìn)入自動同步過程,連續(xù)過渡,直到輸入端和輸出端同步;當(dāng)輸入端轉(zhuǎn)速小于輸出端轉(zhuǎn)速時,保持分離狀態(tài)。

圖8 同步自動離合器仿真模型Fig.8 Simulation model of synchro-self-shifting clutch
3.1.5 可控離合器建模
用彈性摩擦元件來模擬可控離合器。該元件根據(jù)控制要求實(shí)現(xiàn)接合和分離。

圖9 可控離合器仿真模型Fig.9 Simulation model of controllable clutch
3.1.6 電機(jī)建模
根據(jù)需要在電機(jī)元件中輸入電機(jī)轉(zhuǎn)速隨時間變化的曲線。設(shè)置預(yù)設(shè)元件提供轉(zhuǎn)速信號,設(shè)置延時元件對曲線進(jìn)行圓滑處理,使得轉(zhuǎn)速更加接近真實(shí)變化情況,有利于提高仿真速度。電機(jī)仿真模型在輸出端還應(yīng)附加一個彈性輸出軸模型。

圖10 電機(jī)仿真模型Fig.10 Simulation model of motor
3.1.7 測功機(jī)建模
設(shè)置轉(zhuǎn)動慣量元件模擬測功機(jī)的轉(zhuǎn)動慣量。根據(jù)需要設(shè)定測功機(jī)的轉(zhuǎn)矩-轉(zhuǎn)速外特性曲線。設(shè)置負(fù)載元件定義測功機(jī)負(fù)載功率隨時間的變化曲線。設(shè)置傳感器元件檢測測功機(jī)的轉(zhuǎn)速,并將轉(zhuǎn)速信號輸入到函數(shù)定義元件中,以輸出取了絕對值的轉(zhuǎn)速信號。通過此信號,轉(zhuǎn)矩元件可以通過查表得到測功機(jī)提供的負(fù)載轉(zhuǎn)矩。

圖11 測功機(jī)仿真模型Fig.11 Simulation model of dynamometer
3.1.8 齒輪箱建模
將2個人字齒輪建立嚙合傳動關(guān)系,即可構(gòu)件一組人字齒輪嚙合副。以一個齒輪嚙合副為基本單位,按照齒輪箱的結(jié)構(gòu)布置搭建相應(yīng)的模型,進(jìn)而可以構(gòu)件齒輪箱。
3.2 仿真模型封裝
為使仿真模型簡潔明了,便于參數(shù)化設(shè)計(jì),應(yīng)對所建立的單個仿真模型進(jìn)行封裝。模型的封裝按以下步驟:
1)新建一個基本模型;
2)提取變量,構(gòu)成最外層封裝模型的參數(shù)設(shè)置界面;
3)將封裝模型存儲在模型庫中,方便后續(xù)改進(jìn);
4)設(shè)定封裝模型的輸入端口和輸出端口;
5)撰寫封裝模型的說明文檔。
4 四機(jī)兩軸CCG傳動系統(tǒng)仿真計(jì)算
仿真總時間為3 000 s,最小輸出步長為0.001。具體仿真工況如表2所示。

表2 四機(jī)兩軸傳動系統(tǒng)仿真參數(shù)
首先,按照表2進(jìn)行試驗(yàn)研究,通過對試驗(yàn)數(shù)據(jù)的監(jiān)測與整理,得到相應(yīng)的試驗(yàn)曲線,如圖12所示。

圖12 四機(jī)兩軸CCG傳動系統(tǒng)試驗(yàn)曲線Fig.12 Test curve of four-engine and two-shaft CCG transmission system
通過試驗(yàn)曲線可以看到,轉(zhuǎn)速曲線和扭矩曲線的變化趨勢相同,均隨著時間的增長不斷上升。在4個電機(jī)速度變化的時間點(diǎn),扭矩曲線存在一定程度的突變。隨著速度與負(fù)載的增加,在試驗(yàn)的最后階段,曲線的波動值越來越大。
通過SimulationX平臺的仿真計(jì)算得到如圖13~圖18所示曲線。

圖13 1#測扭儀轉(zhuǎn)速Fig.13 Rotational speed of torquemeter 1
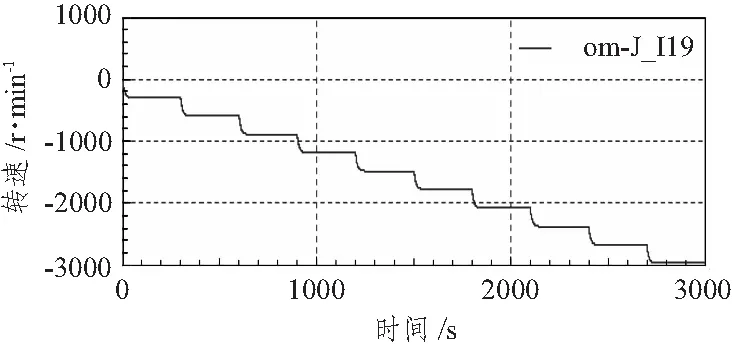
圖14 2#測扭儀轉(zhuǎn)速Fig.14 Rotational speed of torquemeter 2

圖15 3#測扭儀轉(zhuǎn)速Fig.15 Rotational speed of torquemeter 3
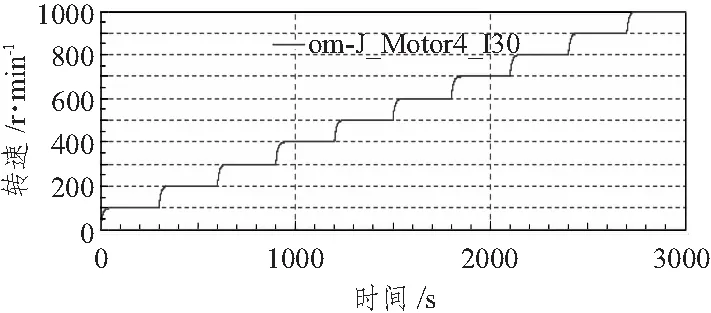
圖16 4#測扭儀轉(zhuǎn)速Fig.16 Rotational speed of torquemeter 4

圖17 5#測扭儀轉(zhuǎn)速Fig.17 Rotational speed of torquemeter 5

圖18 6#測扭儀轉(zhuǎn)速Fig.18 Rotational speed of torquemeter 6
比較圖12與圖13~圖18,6個測扭儀測量的轉(zhuǎn)速曲線與試驗(yàn)所得的速度曲線基本相同。為了保證自動離合器能夠準(zhǔn)確結(jié)合,在保證3#、4#電機(jī)穩(wěn)定轉(zhuǎn)動的前提下,1#、2#電機(jī)的轉(zhuǎn)速始終與其保持如下的比例關(guān)系:

(2)
n2=n1。
(3)
n4=n3。
(4)
其中n1~n4分別為4個電機(jī)的轉(zhuǎn)速。
通過上式計(jì)算得到的1#、2#電機(jī)的最高穩(wěn)定轉(zhuǎn)速與試驗(yàn)設(shè)計(jì)的轉(zhuǎn)速目標(biāo)基本一致。其效果與試驗(yàn)過程中實(shí)際的電機(jī)調(diào)速使得自動離合器兩端同步的效果一致。

圖19 1#測扭儀扭矩Fig.19 Torque of torquemeter 1
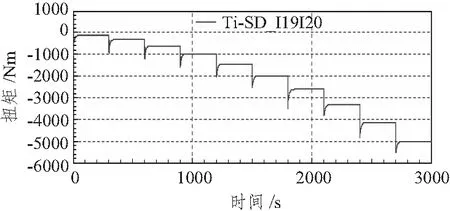
圖20 2#測扭儀扭矩Fig.20 Torque of torquemeter 2

圖21 3#測扭儀扭矩Fig.21 Torque of torquemeter 3
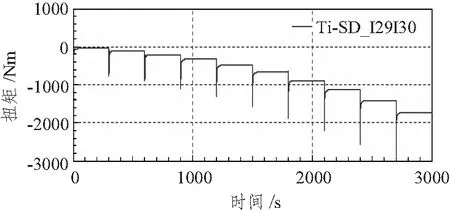
圖22 4#測扭儀扭矩Fig.22 Torque of torquemeter 4

圖23 5#測扭儀扭矩Fig.23 Torque of torquemeter 5
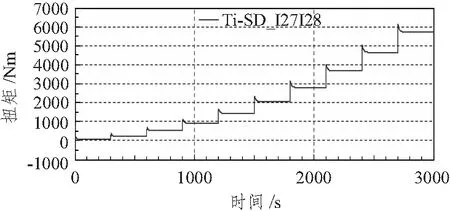
圖24 6#測扭儀扭矩Fig.24 Torque of torquemeter 6
通過比較圖12與圖19~圖24可知,所得的扭矩值隨著轉(zhuǎn)速、負(fù)載的增加而增加,并且與試驗(yàn)中測扭儀測量所得的扭矩曲線在幅值與趨勢上很接近,且相對誤差不超過10%。在4個電機(jī)調(diào)速的時間點(diǎn),扭矩曲線波動較大,而且電機(jī)轉(zhuǎn)速率越大,轉(zhuǎn)矩峰值的變化越大,這主要與同步自動離合器模型、
可控離合器模型的剛度與阻尼值相關(guān)。
5 結(jié) 語
本文主要對大功率四機(jī)兩軸CCG傳動進(jìn)行系統(tǒng)仿真分析研究。采用SimulationX仿真平臺詳細(xì)建立了傳動系統(tǒng)中的各個關(guān)鍵模型,經(jīng)過封裝與組合形成了最終的仿真系統(tǒng)模型。通過仿真計(jì)算結(jié)果和試驗(yàn)結(jié)果的對比分析,證實(shí)了本文中傳動系統(tǒng)的仿真建模方法及所建仿真系統(tǒng)模型的有效性與正確性。
[1] 于東洋,劉永恒,鄒璇,等.船用大功率CCG傳動系統(tǒng)研究[J].艦船科學(xué)技術(shù),2010,32(8):154-156.
YUDong-yang,LIUYong-heng,ZOUXuan,etal.ResearchonhighpowerCCGtransmissionforwarship[J].ShipScienceandTechnolocy,2010,32(8):154-156.
[2] 劉艷芳.SimulationX精解與實(shí)例[M].北京:機(jī)械工業(yè)出版社,2010:62-125.
[3] 黎文勇,王書翰,OBENAUSC.基于SimulationX的斜盤柱塞泵的模擬仿真[J].液壓氣動與密封.2010(8):32-36.
LIWen-yong,WANGShu-han,OBENAUSC.ModelinganaxialpistonhydraulicpumpwithsimulationX[J].HydraulicsPneumatics&Seals.2010(8):32-36.
[4] 黎文勇,王書翰,OBENAUSC.基于SimulationX的斜盤柱塞泵的模擬仿真[C].第六屆全國流體傳動與控制學(xué)術(shù)會議.2010:89-96.
LIWen-yong,WANGShu-han,OBENAUSC.ModelinganaxialpistonhydraulicpumpwithsimulationX[C].TheSixthConferenceonLiquidTransmissionandControl,2010:89-96.
[5] 王志,謝華錕,王貴成.齒輪傳動系統(tǒng)仿真[J].農(nóng)業(yè)機(jī)械學(xué)報(bào),2005,36(12):110-113.
WANGZhi,XIEHua-kun,WANGGui-cheng.Simulationofgearstransmissionsystem[J].AgricultureMechanicsJournal,2005, 36(12):110-113.
[6] 秦小霞,韓振南.齒輪傳動系統(tǒng)的動態(tài)模擬[J].機(jī)械工程與自動化,2010(1):37-39.
QINXiao-xia,HANZhen-nan.Danymicsimulationongeartransmissionsystem[J].MechanicalEngineering&Automation,2010(1):37-39.
System simulation on the high-power CCG transmission for warship based on SimulationX
SONG Qiang,YU Dong-yang,CHEN Tao
(The 703 Research Institute of CSIC,Harbin 150036,China)
The system simulation on the high-power four-engine and two-shaft CCG transmission for warship was analyzed and researched by the simulation platform SimulationX.For the four-engine and two-shaft CCG transmission form,every simulation sub-model in the transmission system was built in detail in the paper.The whole system simulation model was established after encapsulation and assembling.According to the contrast between simulation results and test data,the validity and accuracy of the simulation modeling method and the system model adopted in the paper was demonstrated.
SimulationX;warship;CCG transmission;system simulation;transmission system
2013-04-07;
2013-05-20
宋強(qiáng)(1982-),男,工程師,從事機(jī)械設(shè)計(jì)工作。
TH132.41
A
1672-7649(2014)03-0056-06
10.3404/j.issn.1672-7649.2014.03.011
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網(wǎng)絡(luò)安全與數(shù)據(jù)管理(2022年1期)2022-08-29 03:15:20
導(dǎo)航定位學(xué)報(bào)(2022年4期)2022-08-15 08:27:00
中學(xué)生數(shù)理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀(jì)智能(數(shù)學(xué)備考)(2021年9期)2021-11-24 01:14:36
成都醫(yī)學(xué)院學(xué)報(bào)(2021年2期)2021-07-19 08:35:14
新世紀(jì)智能(數(shù)學(xué)備考)(2020年9期)2021-01-04 00:25:14
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19