基于摩擦補償的空間機械臂關節高精度控制研究
2014-07-25 11:29:34張曉東賈山剛
載人航天 2014年2期
關鍵詞:機械
張曉東,劉 鑫,賈山剛
(1.中國空間技術研究院總體部,北京100094;2.北京航天飛行控制中心,北京100094)
·工程技術·
基于摩擦補償的空間機械臂關節高精度控制研究
張曉東1,劉 鑫1,賈山剛2
(1.中國空間技術研究院總體部,北京100094;2.北京航天飛行控制中心,北京100094)
空間機械臂關節具有大慣量、高精度的特點,針對空間機械臂關節低速、高精度控制要求,提出一種基于摩擦補償的雙位置閉環控制策略。建立了考慮摩擦和慣量變化等因素的一體化關節動力學模型,分析了全位置閉環系統的穩定性,在此基礎上提出了一種基于雙位置傳感器信息的閉環伺服控制策略,并引入自適應率辨識未知摩擦和慣量變化,利用Lyapunov函數證明閉環系統的穩定性和跟蹤誤差的漸進收斂性。在測試平臺上的試驗結果表明,提出的空間機械臂一體化關節伺服控制策略能夠有效地提高關節伺服控制精度和系統魯棒性。
機械臂關節;摩擦補償;參數自適應;伺服控制
1 引言
空間機械臂的運動是通過各個機械臂關節的組合運動來實現的,因此,空間機械臂關節及其伺服控制系統性能是空間機械臂完成各種高精度作業任務的前提和基礎。但在實際的系統中,關節傳動系統中存在的大慣量和非線性摩擦會導致較大的穩態誤差和極限環振蕩等不良后果,是影響空間機械臂關節高精度位置控制的重要因素,如忽略大慣量和摩擦非線性的影響,機械臂執行高精度任務的能力和穩定性將會受到很大的限制。
摩擦非線性會導致嚴重的穩態定位誤差,大大降低了系統的穩定性,引入積分的高增益PD控制雖然可以減小靜差,但存在容易激發極限環振蕩、增大傳感器噪聲的問題[1]。許多研究者將此類非線性因素視為外部干擾的一部分,提出基于干擾觀測器的魯棒控制、變結構等非線性控制方法[2],但該方法難以描述摩擦動態特性,對低速時摩擦補償能力有限。當前,基于摩擦模型的補償方法是消除摩擦的最為有效的方法[3]。但在實際的空間環境中,模型參數會隨著外界條件諸如溫度變化、潤滑條件、機械磨損和慣量變化等因素而變化[4],由于其參數的時變特性,參數離線辨識的方法難以取得較高精度。
本文提出自適應摩擦補償的雙位置閉環控制策略方法,設計了具有電機軸位置反饋和驅動組件輸出軸位置反饋的雙閉環伺服控制系統,實現機械臂關節位置全閉環控制,在此基礎上,設計自適應率估計關節慣量和非線性摩擦,并分析了自適應控制的穩定性和漸進收斂性。最后在機械臂關節測試平臺上進行了試驗,試驗表明,在關節非線性因素的影響下,本文提出的控制策略可顯著提高機械臂關節控制系統的精度,具有實際的應用價值。
2 關節動力學建模
對于位置跟蹤系統,摩擦環節對系統的不良影響主要表現為:低速爬行現象(stick-slip運動)和速度過零時的波形畸變。所謂的“爬行現象”一般發生在低速情況下,是指當位置輸入為斜坡信號(速度為常值)時,系統出現靜→動→靜→動的爬行運動,產生低速爬行的原因是由于系統由靜止到運動的轉變過程中,摩擦力的變化具有負斜率特性;在零速時,由于存在靜摩擦,且其變化具有多值性和不連續性,導致系統在速度過零時出現運動不平穩現象,并且在速度過零點時,波形出現“平頂”現象[4]。
考慮上述一體化關節非線性因素,將一體化關節的柔性變形等效為線性扭轉彈簧,建立包括輸出軸轉動慣量、電機軸轉動慣量、非線性摩擦和粘滯阻尼的一體化關節級聯動力學方程如式(1)(2)所示:
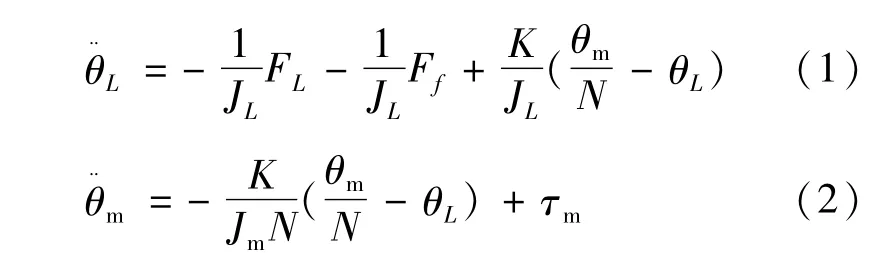
其中,JL為一體化關節輸出軸轉動慣量;
Jm為電機轉子慣量;
θL為一體化關節輸出軸角位移;
θm為電機轉子角位移;
τm為電機輸出力矩;
FL為負載力矩;
Ff為摩擦力矩;
K為一體化關節剛度系數;
N為諧波減速器減速比。
3 關節高精度控制系統設計
3.1 雙位置閉環伺服控制系統設計
空間機械臂關節伺服控制系統是一個位置隨動系統,即實時地跟蹤上位機下發的位置控制指令[5]。為克服機械臂關節非線性因素的影響,提高關節伺服控制系統穩定性,本文設計雙位置閉環伺服控制器提高機械臂關節位置控制精度,圖1為機械臂單關節的伺服控制結構框圖,關節控制器采用基本的PID控制策略,PID控制器輸出經過陷波濾波器后,作為電機驅動器的參考力矩。
關節電機軸位置反饋響應快,可構成高頻段的閉環;關節輸出軸傳感器直接測量關節輸出軸的位置,傳動裝置的非線性并不能影響它的精度,但由于關節輸出通過柔性傳動與關節電機軸相連,關節輸出軸傳感器不會立即對電機軸位置的改變產生反應,電機軸旋轉與關節輸出軸之間的時間滯后導致關節輸出軸傳感器不能構成快速的閉環回路。因此,考慮到關節位置精度的重要性,采用高精度位置傳感器安裝于關節輸出軸,測量關節輸出的絕對位置信息,而將關節電機軸位置傳感器測量的電機位置信息,微分后求取電機轉速,連接到PID控制器的速度反饋回路,從而構成雙位置閉環伺服控制系統。
機械臂關節伺服系統位置反饋一般包括電機軸位置反饋和關節輸出軸位置反饋。為了提高關節輸出精度,一般將位置傳感器直接安裝于關節輸出端的位置,以消除傳動系統不精確的影響,從而構成全位置閉環伺服控制系統,但對于存在關節非線性的伺服控制系統,關節輸出端位置反饋難以保證控制系統穩定性,分析過程如下:
具有關節柔性的閉環伺服控制系統簡化結構如圖2所示,其中,輸入為電機輸入轉矩,輸出分別為關節電機軸位置和關節輸出軸位置,K為關節剛度,KC為粘性阻尼。
根據圖2所示框圖,可導出矩陣方程如式(3)所示。
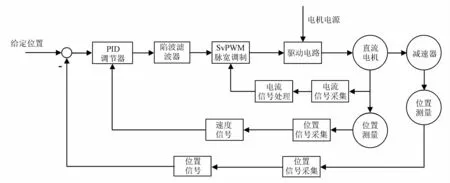
圖1 關節雙位置閉環伺服控制結構框圖Fig.1 Servo control system structure of joint double position close-loop
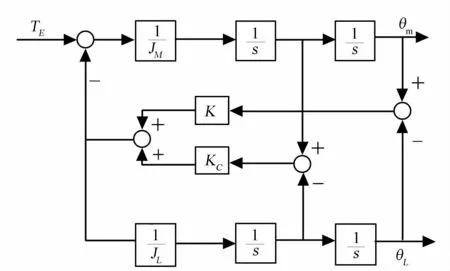
圖2 關節閉環伺服控制系統結構Fig.2 Close-loop Servo control system structure of joint
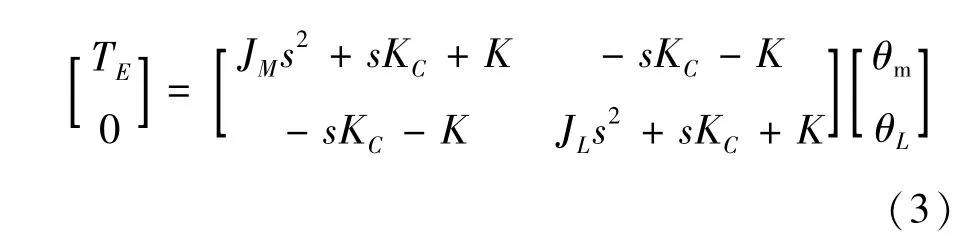
將位置傳感器安裝于關節輸出軸位置的全閉環控制系統,電機轉矩到關節輸出軸位置的傳遞函數如式(4)所示。
將位置傳感器安裝于電機軸位置的半閉環控制系統,電機轉矩到電機輸出軸位置的傳遞函數如式(5)所示。
式(4)與式(5)相比,分子中沒有s2項,導致在高頻段減少90°的相位滯后,因此,單純依賴于關節輸出軸位置反饋的高精度穩定控制系統是難以實現的。
3.2 關節的伺服控制策略

其中,λ為一正常數,且λ>0。

既然kL>0,當t→∞時,誤差rL將趨近于零,因此,整個控制系統將是穩定的。上式中假定式(7)中的均為精確值,但在實際的系統中,是未知的,因此設計控制系統的自適應率來消除不確定因素的影響。
參數自適應控制設計的目的為:在慣量變化、負載變化等不確定因素的影響下,仍使關節位置偏差r趨近于零。在實際系統中,參數通
L
常具有未知性和不確定性,因此本文根據輸出位置誤差設計參數自適應率如式(9)(10)。
其中,μ,β均為正的自適應率增益常數。
3.3 自適應控制系統穩定性分析
為了驗證具有自適應率的雙狀態觀測器的穩定性,設計Lyapunov函數如式(11)所示。

則Lyapunov函數的一階導數可表示為式(12)所示形式。
根據控制率(7),且將參數自適應率式(9)、(10)代入(12)式,可得如式(13)。



則rL(t)漸進趨近于零,可得位置控制偏差e(t)和速度偏差·e(t)也漸進趨近于零。
4 關節位置控制試驗驗證
試驗加載設備采用吊裝砝碼產生加載力矩的方式,試驗工裝如圖3所示。
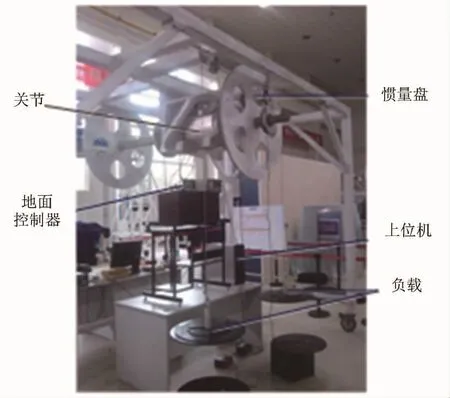
圖3 關節控制試驗裝置Fig.3 Joint control experiment system
該工裝將關節與慣量盤連接,慣量盤兩端加砝碼可以調節關節的負載。
將規劃的關節速度轉換為相應的電機速度,轉化方法為用關節速度乘減速比得到,分別進行空載、140 Nm負載、285 Nm負載情況下的速度跟蹤試驗,試驗效果如圖4所示。由圖可見,關節電機可以很好的跟蹤電機輸入速度,并且在加載情況下,速度波動影響較小。
關節位置軌跡跟蹤試驗如圖5所示,分別進行空載、140 Nm負載、285 Nm負載情況下的位置跟蹤試驗。通過試驗過程數據及分析,得到如下結果:
1)關節位置的跟蹤效果較好,關節位置跟蹤可快速響應關節期望位置;
2)關節停止運行時,關節位置波動較小,波動范圍小于±20″,關節停止運動后,穩態誤差在1.7'以內;
3)隨著負載的變化,關節的位置跟蹤沒有出現變化,不會因為負載的變大導致響應變慢和穩態誤差增大,表明在關節的工作范圍內具有較好特性。
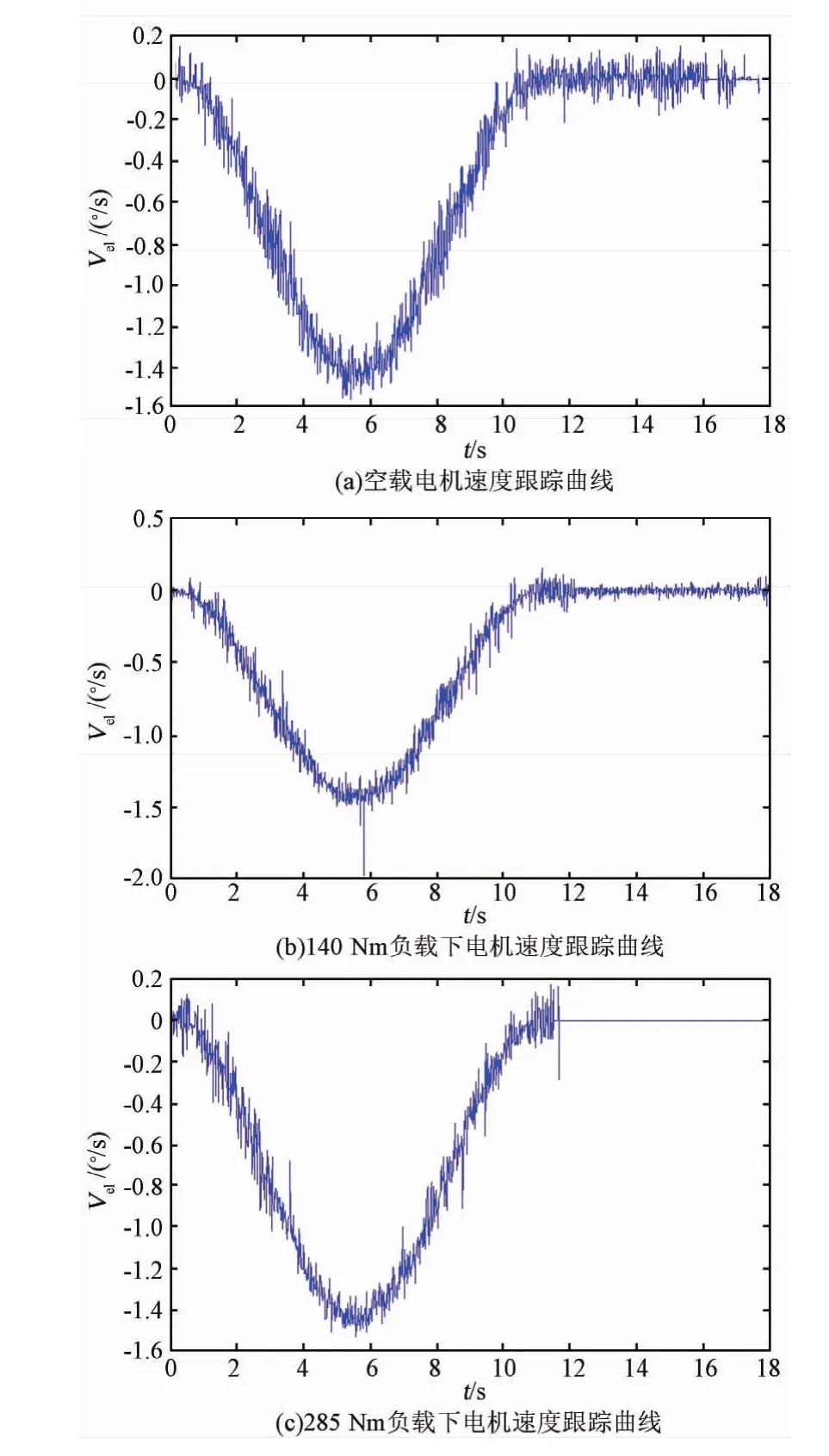
圖4 關節速度跟蹤試驗結果Fig.4 Joint velocity control experiment system
5 結論
由關節定位精度測試結果可知:
1)所提出的空間機械臂關節雙位置伺服控制系統具有很高的穩態控制精度;
2)提出的關節高精度位置控制策略穩定且漸進收斂;
3)參數自適應率可有效的估計慣量和摩擦不確定性,同傳統的全位置閉環控制策略相比,可顯著提高定位控制精度和魯棒性。
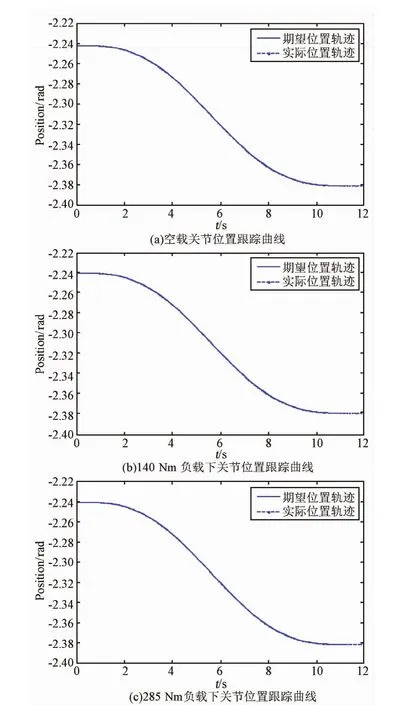
圖5 關節位置跟蹤試驗結果Fig.5 Joint position control experiment system
[1] 張曉東,孫漢旭,賈慶軒,等.機器人模塊化關節模糊自適應伺服控制系統[J].北京郵電大學學報,2007,30(5):37-40.
[2] Iwasaki M,Shibate T.Disturbance-observer-based nonlinear friction compensation in table drive system[J].IEEE/ASME Transaction on mechatronics,1999,4(1):3-8.
[3] 張曉東,孫漢旭,賈慶軒,等.空間機器人柔性關節的軌跡控制研究[J].宇航學報,2008,29(6):1865-1870.
[4] 張曉東,張東華.有摩擦補償的驅動組件高精度位置控制研究[J].航天器工程,2010(3):45-51.
[5] 宋申民,宋卓異,陳興林,等.衛星光通信粗瞄系統非線性摩擦的神經網絡補償[J].航空學報,2007,28(2):358-364.
[6] Tan Y,Chang J,Tan H.Adaptive friction compensation for induction motors with inertia and load uncertainties[C]//A-merican Control Conference,2000.Proceedings of the 2000. IEEE,2000,1(6):615-620.
Study on High Precision Position Control of Space Robotic Arm Joints Based on Friction Com pensation
ZHANG Xiaodong1,LIU Xin1,JIA Shangang2
(1.Institute of Spacecraft System Engineering,China Academy of Space Technology,Beijing 100094,China;2.Beijing Aerospace Control Center,Beijing 100094,China)
An adaptive high precision position controlwith friction compensation and double-position sensor scheme for Space robotic arm jointwas presented.A robotic arm jointwasmodeled as a cascade dynamics system and friction modelwith nonuniform friction variationswas used to characterize the friction force.The stability of double-position sensor close-loop control system was analyzed and nonlinear adaptive control lawswere designed to identify the unknown friction,inertia and the external disturbances.The system stability and asymptotic trajectory tracking performance were guaranteed by Lyapunov function and demonstrated by the experimental results.
manipulator joint;friction compensation;parameter adaptive;servo control
V423.7
A
1674-5825(2014)02-0099-05
2014-01-06;
2014-02-28
張曉東(1980-),男,博士,高級工程師,研究方向為空間機器人技術。E-mail:15810002976@139.com
猜你喜歡
機械工程材料(2022年10期)2022-11-21 12:08:44
小學科學(學生版)(2021年9期)2021-11-02 05:26:46
電腦報(2020年35期)2020-09-17 13:25:53
當代工人(2020年8期)2020-05-25 09:07:38
電腦報(2019年40期)2019-09-10 07:22:44
建材發展導向(2019年13期)2019-08-24 06:37:40
電子制作(2018年14期)2018-08-21 01:38:14
小溪流(畫刊)(2017年12期)2018-01-10 16:07:29
筑路機械與施工機械化(2017年6期)2017-07-10 11:54:50
科技知識動漫(2016年8期)2016-07-29 20:40:09
